



A Multi-Input Convolutional Neural Networks Model for Earthquake Precursor Detection Based on Ionospheric Total Electron Content

 ,
,  ,
,  , , ,
, , ,  and
and
Abstract
:1. Introduction
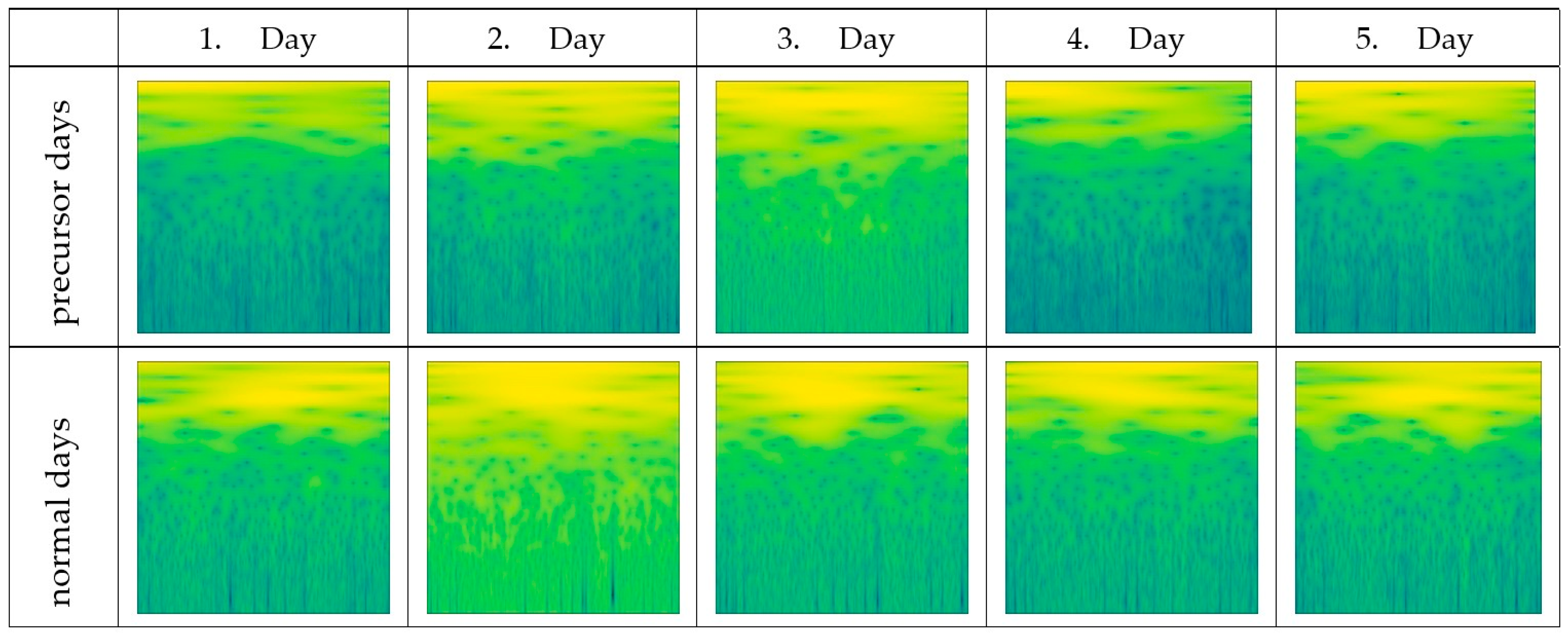
- TEC time–frequency images are constructed and used as the input to a CNN model for “precursor days” and “normal days” prediction purposes for the first time.
- Five-day TEC and space weather indices are used dependently to detect the pre-earthquake and post-earthquake TEC and space weather indices. In other words, 5-day data is used as the input to the proposed CNN model simultaneously.
2. Proposed Method
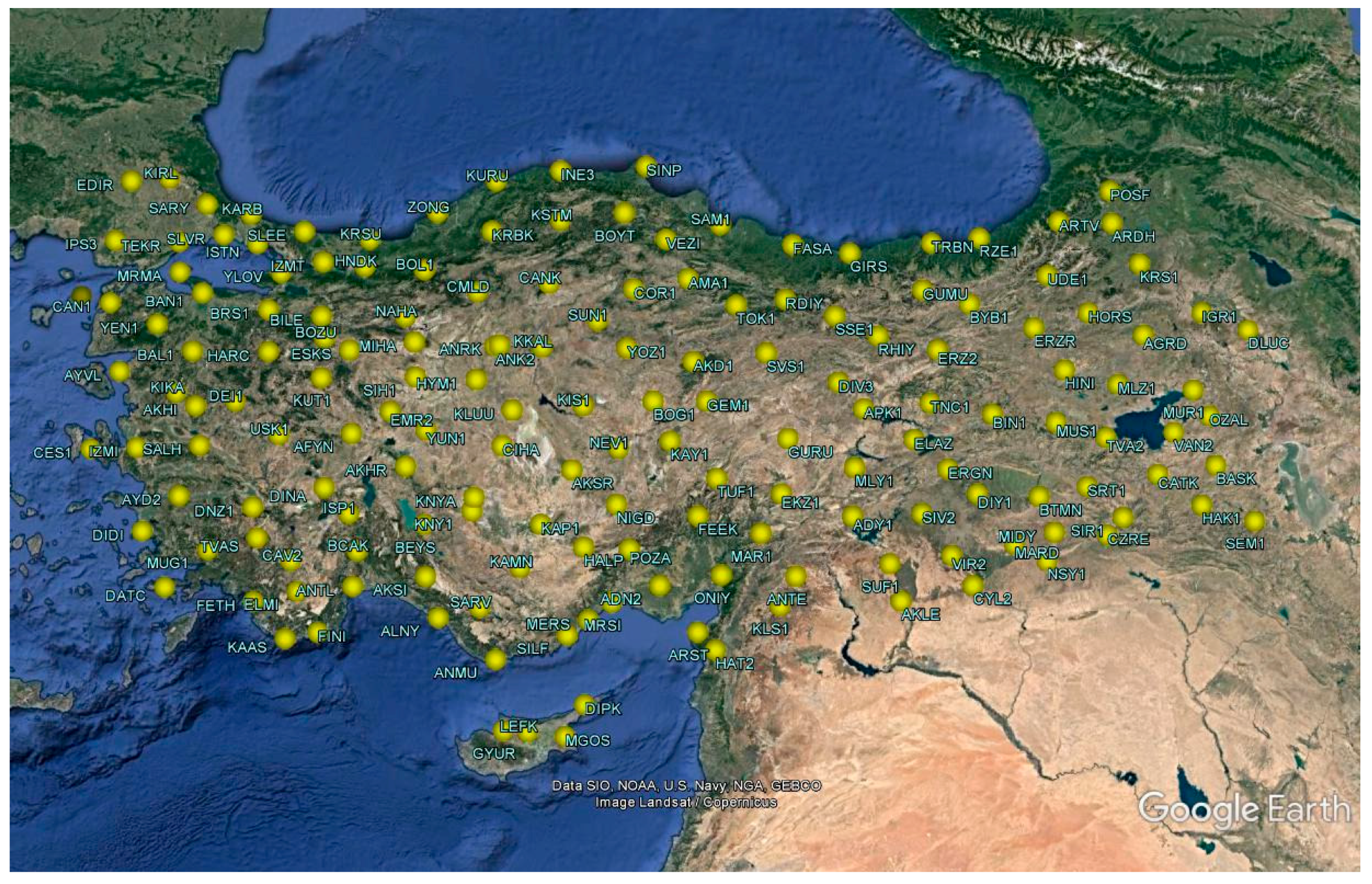
2.1. Data Collection
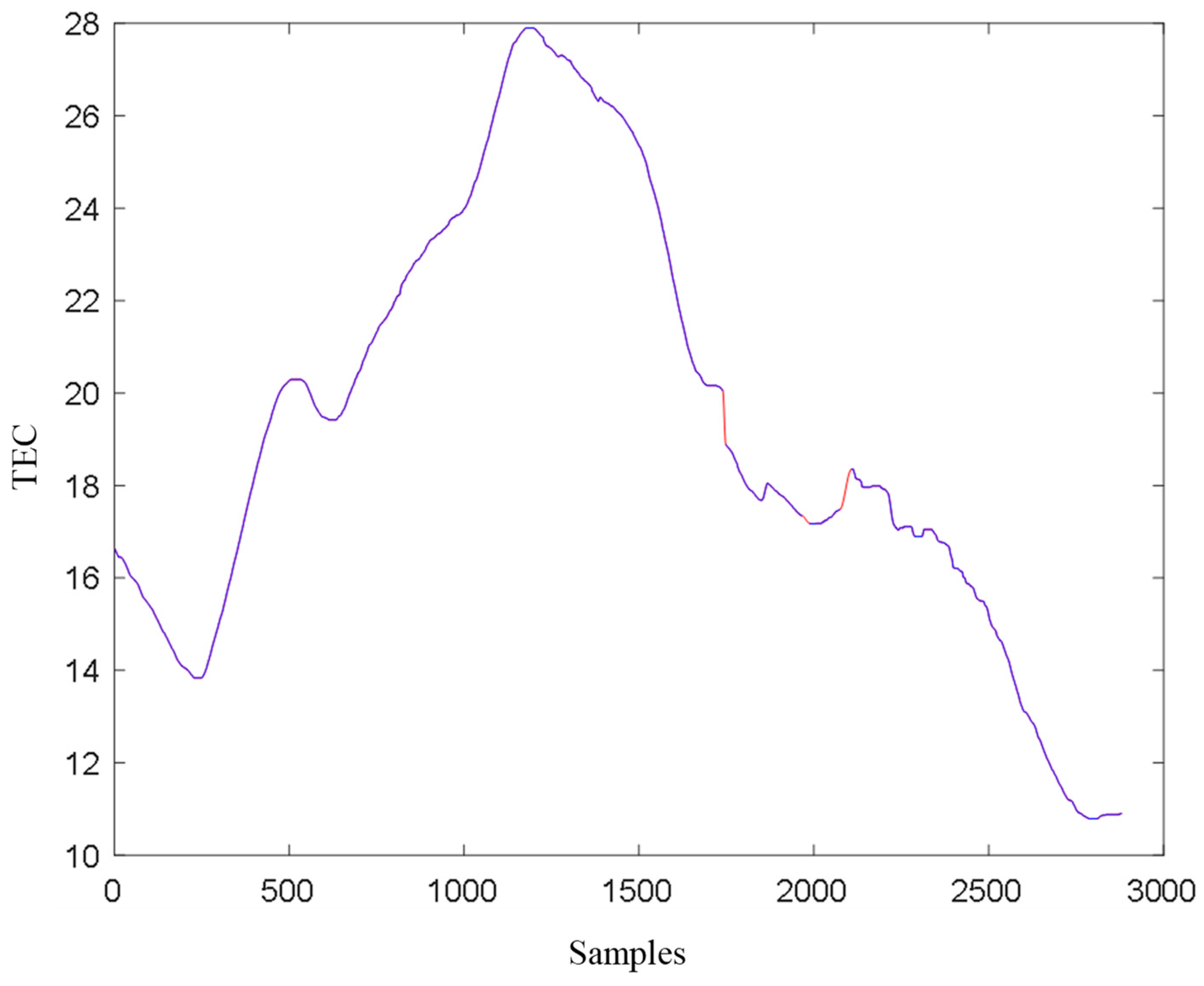
2.2. Preprocessing
2.3. Time–Frequency Image Representation of TEC Signal
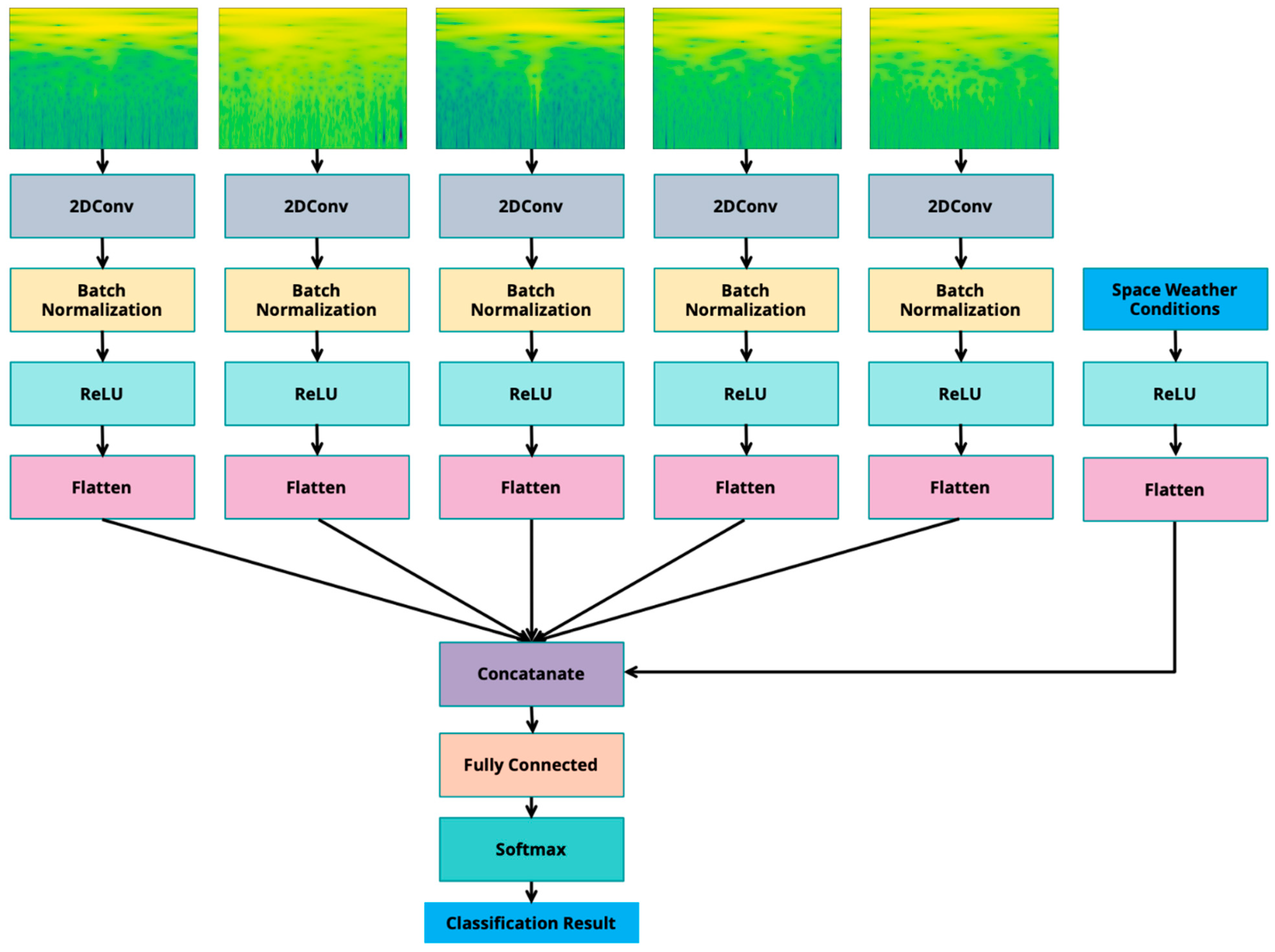
2.4. Multi-Input Convolutional Neural Networks Model
3. Experimental Works and Results
4. Conclusions
- (1)
- To handle the increasing data size, we will add more layers to each network branch. Specifically, we will add a convolutional layer, a batch normalization layer, and a ReLU layer to each branch. The convolutional layer will apply a set of filters to the input to extract features. The batch normalization layer will normalize the output of the convolutional layer to improve the stability and speed of the training. The ReLU layer will apply a non-linear activation function to the output of the batch normalization layer to introduce non-linearity and sparsity to the network.
- (2)
- To improve the performance and robustness of the network, we will add skip connection layers to each deepened network branch. Skip connection layers are layers that connect the output of one layer to the input of another layer that is not adjacent to it. This way, the network can learn both local and global features and avoid the problem of vanishing gradients. Skip connection layers also help reduce overfitting by regularizing the network and preventing co-adaptation of features.
- (3)
- To enhance the collaboration and interaction among the network branches, we will add connection skip layers between different input branches of the network. Connection skip layers are layers that connect the output of one branch to the input of another branch that is not directly connected to it. This way, the network can learn from multiple sources of information and leverage the complementary and supplementary features from different branches. Connection skip layers also help train the branches jointly instead of separately and avoid the problem of branch divergence.
- (4)
- To increase the flexibility and adaptability of the network, we will add attention mechanisms to the network branches. Attention mechanisms are units that create direct connections between the input and the output of the network and assign different weights to different parts of the input based on the output. This way, the network can focus on the most relevant and informative parts of the input and ignore the irrelevant and noisy parts. Attention mechanisms also help simplify the network structure, reduce the number of parameters, and avoid the problem of overfitting.
- (5)
- In our future works, we will employ Grad-CAM (Gradient-weighted Class Activation Mapping) to gain insights into the model’s decision-making process, especially regarding false positives and negatives. Grad-CAM is a technique that visualizes the regions of an image that are important for a particular class prediction. It does so by leveraging the gradients of the target class concerning the final convolutional layer of the model. This provides a heat map highlighting the areas of the input image that contributed most to the model’s decision. By incorporating Grad-CAM into our analysis, we can pinpoint the regions of interest in instances where the model failed. This visualization not only helps in understanding the characteristics of misclassifications but also provides valuable insights into the features or patterns the model may be overlooking or misinterpreting.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Krasnov, V.M.; Drobzheva, Y.V. The acoustic field in the ionosphere caused by an underground nuclear explosion. J. Atmos. Sol. Terr. Phys. 2005, 67, 913–920. [Google Scholar] [CrossRef]
- Yiğit, E.; Koucká Knížová, P.; Georgieva, K.; Ward, W. A review of vertical coupling in the Atmosphere–Ionosphere system: Effects of waves, sudden stratospheric warmings, space weather, and of solar activity. J. Atmos. Sol. Terr. Phys. 2016, 141, 1–12. [Google Scholar] [CrossRef]
- Astafyeva, E. Ionospheric detection of natural hazards. Rev. Geophys. 2019, 57, 1265–1288. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, X.; Ren, X.; Zhang, J.; Freeshah, M.; Zhao, Z. Ionospheric disturbances detected during a typhoon based on GNSS phase observations: A case study for typhoon Mangkhut over Hong Kong. Adv. Space Res. 2020, 66, 1743–1753. [Google Scholar] [CrossRef]
- Freeshah, M.; Osama, N.; Zhang, X. Using real GNSS data for ionospheric disturbance remote sensing associated with strong thunderstorm over Wuhan city. Acta Geod. Geophys. 2023. [Google Scholar] [CrossRef]
- Freeshah, M.; Zhang, X.; Chen, J.; Zhao, Z.; Osama, N.; Sadek, M.; Twumasi, N.; Twumasi, N. Detecting Ionospheric TEC Disturbances by Three Methods of Detrending through Dense CORS During A Strong Thunderstorm. Ann. Geophys. 2020, 63, GD667. [Google Scholar] [CrossRef]
- Freeshah, M.; Zhang, X.; Şentürk, E.; Adil, M.A.; Mousa, B.G.; Tariq, A.; Ren, X.; Refaat, M. Analysis of Atmospheric and Ionospheric Variations Due to Impacts of Super Typhoon Mangkhut (1822) in the Northwest Pacific Ocean. Remote Sens. 2021, 13, 661. [Google Scholar] [CrossRef]
- Kundu, B.; Senapati, B.; Matsushita, A.; Heki, K. Atmospheric wave energy of the 2020 August 4 explosion in Beirut, Lebanon, from ionospheric disturbances. Sci. Rep. 2021, 11, 2793. [Google Scholar] [CrossRef]
- Vesnin, A.; Yasyukevich, Y.; Perevalova, N.; Şentürk, E. Ionospheric Response to the 6 February 2023 Turkey–Syria Earthquake. Remote Sens. 2023, 15, 2336. [Google Scholar] [CrossRef]
- Leonard, R.S.; Barnes, R.A., Jr. Observation of ionospheric disturbances following the Alaska earthquake. J. Geophys. Res. 1965, 70, 1250–1253. [Google Scholar] [CrossRef]
- Yuen, P.C.; Weaver, P.F.; Suzuki, R.K.; Furumoto, A.S. Continuous, traveling coupling between seismic waves and the ionosphere evident in May 1968 Japan earthquake data. J. Geophys. Res. 1969, 74, 2256–2264. [Google Scholar] [CrossRef]
- Weaver, P.F.; Yuen, P.C.; Prolss, G.W.; Furumoto, A.S. Acoustic Coupling into the Ionosphere from Seismic Waves of the Earthquake at Kurile Islands on August 11, 1969. Nature 1970, 226, 1239–1241. [Google Scholar] [CrossRef] [PubMed]
- Pulinets, S.A. Strong earthquake prediction possibility with the help of topside sounding from satellites. Adv. Space Res. 1998, 21, 455–458. [Google Scholar] [CrossRef]
- Du, P.R.; Jiang, H.R.; Guo, J.S. Research on possibility of ionospheric anomalies as an earthquake precursor. Earthquake 1998, 18, 119. (In Chinese) [Google Scholar]
- Komjathy, A. Global Ionospheric Total Electron Content Mapping Using the Global Positioning System. Ph.D. Thesis, University of New Brunswick, Fredericton, NB, Canada, 1997. Department of Geodesy and Geomatics Engineering Technical Report No. 188. [Google Scholar]
- Afraimovich, E.L.; Astafieva, E.I.; Gokhberg, M.B.; Lapshin, V.M.; Permyakova, V.E.; Steblov, G.M.; Shalimov, S.L. Variations of the total electron content in the ionosphere from GPS data recorded during the Hector Mine earthquake of October 16, 1999, California. Russ. J. Earth Sci. 2004, 6, 339–354. [Google Scholar] [CrossRef]
- Liu, J.Y.; Chuo, Y.J.; Shan, S.J.; Tsai, Y.B.; Chen, Y.I.; Pulinets, S.A.; Yu, S.B. Pre-earthquake ionospheric anomalies registered by continuous GPS TEC measurements. Ann. Geophys. 2004, 22, 1585–1593. [Google Scholar] [CrossRef]
- Ulukavak, M.; Yalcinkaya, M. Precursor analysis of ionospheric GPS-TEC variations before the 2010 M7.2 Baja California earthquake. Geomat. Nat. Hazards Risk 2017, 8, 295–308. [Google Scholar] [CrossRef]
- Tariq, M.A.; Shah, M.; Hernández-Pajares, M.; Iqbal, T. Pre-earthquake ionospheric anomalies before three major earthquakes by GPS-TEC and GIM-TEC data during 2015–2017. Adv. Space Res. 2019, 63, 2088–2099. [Google Scholar] [CrossRef]
- Shah, M.; Abbas, A.; Adil, M.A.; Ashraf, U.; de Oliveira-Júnior, J.F.; Tariq, M.A.; Ahmed, J.; Ehsan, M.; Ali, A. Possible seismo-ionospheric anomalies associated with Mw > 5.0 earthquakes during 2000–2020 from GNSS TEC. Adv. Space Res. 2022, 70, 179–187. [Google Scholar] [CrossRef]
- Liu, J.Y.; Chen, Y.I.; Chen, C.H.; Liu, C.Y.; Chen, C.Y.; Nishihashi, M.; Li, J.Z.; Xia, Y.Q.; Oyama, K.I.; Hattori, K.; et al. Seismoionospheric GPS total electron content anomalies observed before the 12 May 2008 Mw7.9 Wenchuan earthquake. J. Geophys. Res. Space Phys. 2009, 114. [Google Scholar] [CrossRef]
- Pulinets, S.A.; Contreras, A.L.; Bisiacchi-Giraldi, G.; Ciraolo, L. Total eletron content variations in the ionosphere before the Colima, Mexico, earthquake of 21 January 2003. Geofísica Int. 2005, 44, 369–377. [Google Scholar] [CrossRef]
- Zakharov, V.I.; Kunitsyn, V.E. Regional features of atmospheric manifestations of tropical cyclones according to ground-based GPS network data. Geomagn. Aeron. 2012, 52, 533–545. [Google Scholar] [CrossRef]
- Dautermann, T.; Calais, E.; Haase, J.; Garrison, J. Investigation of ionospheric electron content variations before earthquakes in southern California, 2003–2004. J. Geophys. Res. Solid Earth 2007, 112, B02106. [Google Scholar] [CrossRef]
- Zhao, B.; Wang, M.; Yu, T.; Wan, W.; Lei, J.; Liu, L.; Ning, B. Is an unusual large enhancement of ionospheric electron density linked with the 2008 great Wenchuan earthquake? J. Geophys. Res. Space Phys. 2008, 113, A11304. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, P.; Wu, H.; Zhang, S.; Peng, W. Analysis of ionospheric anomalies before the 2011 Mw 9.0 Japan earthquake. Chin. Sci. Bull. 2012, 57, 500–510. [Google Scholar] [CrossRef]
- Shah, M.; Jin, S. Statistical characteristics of seismo-ionospheric GPS TEC disturbances prior to global Mw ≥ 5.0 earthquakes (1998–2014). J. Geodyn. 2015, 92, 42–49. [Google Scholar] [CrossRef]
- Oikonomou, C.; Haralambous, H.; Muslim, B. Investigation of ionospheric TEC precursors related to the M7.8 Nepal and M8.3 Chile earthquakes in 2015 based on spectral and statistical analysis. Nat. Hazards 2016, 83, 97–116. [Google Scholar] [CrossRef]
- Nayak, K.; López-Urías, C.; Romero-Andrade, R.; Sharma, G.; Guzmán-Acevedo, G.M.; Trejo-Soto, M.E. Ionospheric Total Electron Content (TEC) Anomalies as Earthquake Precursors: Unveiling the Geophysical Connection Leading to the 2023 Moroccan 6.8 Mw Earthquake. Geosciences 2023, 13, 319. [Google Scholar] [CrossRef]
- Colonna, R.; Filizzola, C.; Genzano, N.; Lisi, M.; Tramutoli, V. Optimal Setting of Earthquake-Related Ionospheric TEC (Total Electron Content) Anomalies Detection Methods: Long-Term Validation over the Italian Region. Geosciences 2023, 13, 150. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Support vector machines for TEC seismo-ionospheric anomalies detection. Ann. Geophys. 2013, 31, 173–186. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. A MLP neural network as an investigator of TEC time series to detect seismo-ionospheric anomalies. Adv. Space Res. 2013, 51, 2048–2057. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. An Adaptive Network-based Fuzzy Inference System for the detection of thermal and TEC anomalies around the time of the Varzeghan, Iran, (Mw = 6.4) earthquake of 11 August 2012. Adv. Space Res. 2013, 52, 837–852. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Genetic algorithm for TEC seismo-ionospheric anomalies detection around the time of the Solomon (Mw = 8.0) earthquake of 06 February 2013. Adv. Space Res. 2013, 52, 581–590. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Thermal and TEC anomalies detection using an intelligent hybrid system around the time of the Saravan, Iran, (Mw = 7.7) earthquake of 16 April 2013. Adv. Space Res. 2014, 53, 647–655. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Investigation of GPS-TEC measurements using ANN method indicating seismo-ionospheric anomalies around the time of the Chile (Mw = 8.2) earthquake of 01 April 2014. Adv. Space Res. 2014, 54, 1768–1772. [Google Scholar] [CrossRef]
- Saqib, M.; Şentürk, E.; Sahu, S.A.; Adil, M.A. Comparisons of autoregressive integrated moving average (ARIMA) and long short term memory (LSTM) network models for ionospheric anomalies detection: A study on Haiti (Mw = 7.0) earthquake. Acta Geod. Geophys. 2022, 57, 195–213. [Google Scholar] [CrossRef]
- Asaly, S.; Gottlieb, L.-A.; Inbar, N.; Reuveni, Y. Using Support Vector Machine (SVM) with GPS Ionospheric TEC Estimations to Potentially Predict Earthquake Events. Remote Sens. 2022, 14, 2822. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Firefly Algorithm in detection of TEC seismo-ionospheric anomalies. Adv. Space Res. 2015, 56, 10–18. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Application of Artificial Bee Colony algorithm in TEC seismo-ionospheric anomalies detection. Adv. Space Res. 2015, 56, 1200–1211. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Decision Tree, Bagging and Random Forest methods detect TEC seismo-ionospheric anomalies around the time of the Chile, (Mw = 8.8) earthquake of 27 February 2010. Adv. Space Res. 2016, 57, 2464–2469. [Google Scholar] [CrossRef]
- Akhoondzadeh, M. Kalman Filter, ANN-MLP, LSTM and ACO Methods Showing Anomalous GPS-TEC Variations Concerning Turkey&rsquos Powerful Earthquake (6 February 2023). Remote Sens. 2023, 15, 3061. [Google Scholar] [CrossRef]
- Aji, B.A.S.; Liong, T.H.; Muslim, B. Detection precursor of sumatra earthquake based on ionospheric total electron content anomalies using N-Model Articial Neural Network. In Proceedings of the 2017 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Bali, Indonesia, 28–29 October 2017; pp. 269–276. [Google Scholar]
- Brum, D.; Veronez, M.R.; de Souza, E.; Koch, I.É.; Gonzaga, L.; Klein, I.; Matsuoka, M.T.; Francisco Rofatto, V.; Junior, A.M.; dos Reis Racolte, G.; et al. A Proposed Earthquake Warning System Based on Ionospheric Anomalies Derived From GNSS Measurements and Artificial Neural Networks. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July 2019–2 August 2019; pp. 9295–9298. [Google Scholar]
- Akyol, A.A.; Arikan, O.; Arikan, F. A Machine Learning-Based Detection of Earthquake Precursors Using Ionospheric Data. Radio. Sci. 2020, 55, e2019RS006931. [Google Scholar] [CrossRef]
- Şentürk, E.; Saqib, M.; Adil, M.A. A Multi-Network based Hybrid LSTM model for ionospheric anomaly detection: A case study of the Mw 7.8 Nepal earthquake. Adv. Space Res. 2022, 70, 440–455. [Google Scholar] [CrossRef]
- Abri, R.; Artuner, H. LSTM-based deep learning methods for prediction of earthquakes using ionospheric data. GAZI Univ. J. Sci. 2022, 35, 1417–1431. [Google Scholar] [CrossRef]
- Lin, J.-W. Predicting ionospheric precursors before large earthquakes using neural network computing and the potential development of an earthquake early warning system. Nat. Hazards 2022, 113, 1519–1542. [Google Scholar] [CrossRef]
- Lin, J.-W. An adaptive Butterworth spectral-based graph neural network for detecting ionospheric total electron content precursor prior to the Wenchuan earthquake on 12 May 2008. Geocarto Int. 2022, 37, 14292–14308. [Google Scholar] [CrossRef]
- Tsai, T.C.; Jhuang, H.K.; Ho, Y.Y.; Lee, L.C.; Su, W.C.; Hung, S.L.; Lee, K.H.; Fu, C.C.; Lin, H.C.; Kuo, C.L. Deep Learning of Detecting Ionospheric Precursors Associated With M ≥ 6.0 Earthquakes in Taiwan. Earth Space Sci. 2022, 9, e2022EA002289. [Google Scholar] [CrossRef]
- Muhammad, A.; Külahcı, F. A semi-supervised total electron content anomaly detection method using LSTM-auto-encoder. J. Atmos. Sol. Terr. Phys. 2022, 241, 105979. [Google Scholar] [CrossRef]
- Xiong, P.; Long, C.; Zhou, H.; Zhang, X.; Shen, X. GNSS TEC-Based Earthquake Ionospheric Perturbation Detection Using a Novel Deep Learning Framework. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4248–4263. [Google Scholar] [CrossRef]
- Yue, Y.; Koivula, H.; Bilker-Koivula, M.; Chen, Y.; Chen, F.; Chen, G. TEC Anomalies Detection for Qinghai and Yunnan Earthquakes on 21 May 2021. Remote Sens. 2022, 14, 4152. [Google Scholar] [CrossRef]
- Draz, M.U.; Shah, M.; Jamjareegulgarn, P.; Shahzad, R.; Hasan, A.M.; Ghamry, N.A. Deep Machine Learning Based Possible Atmospheric and Ionospheric Precursors of the 2021 Mw 7.1 Japan Earthquake. Remote Sens. 2023, 15, 1904. [Google Scholar] [CrossRef]
- Karatay, S.; Gul, S.E. Prediction of GPS-TEC on Mw > 5 Earthquake Days Using Bayesian Regularization Backpropagation Algorithm. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Muhammad, A.; Külahcı, F.; Birel, S. Investigating radon and TEC anomalies relative to earthquakes via AI models. J. Atmos. Sol. Terr. Phys. 2023, 245, 106037. [Google Scholar] [CrossRef]
- Saqib, M.; Şentürk, E.; Sahu, S.A.; Adil, M.A. Ionospheric anomalies detection using autoregressive integrated moving average (ARIMA) model as an earthquake precursor. Acta Geophys. 2021, 69, 1493–1507. [Google Scholar] [CrossRef]
- Saqib, M.; Adil, M.A.; Freeshah, M. Pre-Earthquake Ionospheric Perturbation Analysis Using Deep Learning Techniques. Adv. Geomat. 2023, 1, 48–67. [Google Scholar] [CrossRef]
- Dobrovolsky, I.P.; Zubkov, S.I.; Miachkin, V.I. Estimation of the size of earthquake preparation zones. Pure Appl. Geophys. 1979, 117, 1025–1044. [Google Scholar] [CrossRef]
- Harder, R.L.; Desmarais, R.N. Interpolation using surface splines. J. Aircr. 1972, 9, 189–191. [Google Scholar] [CrossRef]
- Aguiar-Conraria, L.; Soares, M.J. The Contınuous Wavelet Transform: Movıng Beyond Unı-and Bıvarıate Analysıs. J. Econ. Surv. 2014, 28, 344–375. [Google Scholar] [CrossRef]
- Wei, Y.; Xia, W.; Lin, M.; Huang, J.; Ni, B.; Dong, J.; Zhao, Y.; Yan, S. HCP: A Flexible CNN Framework for Multi-Label Image Classification. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1901–1907. [Google Scholar] [CrossRef]
- Li, Y.; Yuan, Y. Convergence Analysis of Two-Layer Neural Networks with ReLU Activation. In Neural Information Processing Systems; Guyon, I., Luxburg, U., Von Bengio, S., Wallach, H., Fergus, R., Vishwanathan, S., Garnett, R., Eds.; Curran Associates, Inc.: New York, NY, USA, 2017; Volume 30. [Google Scholar]
- He, Y.; Zhao, X.; Yang, D.; Wu, Y.; Li, Q. A study to investigate the relationship between ionospheric disturbance and seismic activity based on Swarm satellite data. Phys. Earth Planet. Inter. 2022, 323, 106826. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lon (o) | Lat (o) | Earthquake | Date | Mw |
|---|---|---|---|---|
| 42.276 | 39.234 | Bulanık (Muş) | 2012-03-26T10:35:33 | 5 |
| 27.904 | 40.863 | Marmara Denizi—[12.14 km] Marmaraereğlisi (Tekirdağ) | 2012-06-07T20:54:25 | 5.1 |
| 28.907 | 36.530 | Akdeniz—[17.00 km] Fethiye (Muğla) | 2012-06-10T12:44:16 | 6 |
| 42.444 | 37.157 | Silopi (Şırnak) | 2012-06-14T05:52:51 | 5.5 |
| 43.667 | 38.733 | İpekyolu (Van) | 2012-06-24T20:07:21 | 5 |
| 28.933 | 36.479 | Akdeniz—[16.38 km] Fethiye (Muğla) | 2012-06-25T13:05:28 | 5.3 |
| 28.856 | 35.714 | Akdeniz—[75.07 km] Kaş (Antalya) | 2012-07-09T13:55:00 | 6 |
| 36.371 | 37.574 | Andırın (Kahramanmaraş) | 2012-07-22T09:26:02 | 5 |
| 42.980 | 37.464 | Uludere (Şırnak) | 2012-08-05T20:37:21 | 5.3 |
| 37.140 | 37.284 | Pazarcık (Kahramanmaraş) | 2012-09-19T09:17:46 | 5.1 |
| 25.670 | 39.680 | Ege Denizi—[37.56 km] Bozcaada (Çanakkale) | 2013-01-08T14:16:09 | 5.6 |
| 25.790 | 40.303 | Ege Denizi—[12.01 km] Gökçeada (Çanakkale) | 2013-07-30T05:33:07 | 5.3 |
| 31.257 | 36.692 | Akdeniz-Antalya Körfezi—[15.41 km] Manavgat (Antalya) | 2013-12-08T17:31:57 | 5 |
| 31.332 | 36.048 | Akdeniz—[74.69 km] Alanya (Antalya) | 2013-12-28T15:21:03 | 6 |
| 25.280 | 40.304 | Ege Denizi—[41.51 km] Gökçeada (Çanakkale) | 2014-05-24T09:25:01 | 6.5 |
| 30.930 | 36.172 | Akdeniz—[48.08 km] Kumluca (Antalya) | 2014-09-04T21:00:03 | 5.2 |
| 26.274 | 38.904 | Ege Denizi—[29.35 km] Karaburun (İzmir) | 2014-12-06T01:45:06 | 5.1 |
| 26.728 | 34.864 | Akdeniz—[213.23 km] Datça (Muğla) | 2015-04-16T18:07:37 | 5.9 |
| 35.036 | 36.565 | Akdeniz-Mersin Körfezi—[14.71 km] Karataş (Adana) | 2015-07-29T22:00:54 | 5 |
| 29.885 | 36.185 | Akdeniz, Kekova Adası, Demre (Antalya) | 2015-10-06T21:27:34 | 5.2 |
| 37.824 | 38.838 | Hekimhan (Malatya) | 2015-11-29T00:28:08 | 5 |
| 40.217 | 39.261 | Kiğı (Bingöl) | 2015-12-02T23:27:07 | 5.3 |
| 34.358 | 39.564 | Çiçekdağı (Kırşehir) | 2016-01-10T17:40:48 | 5 |
| 27.597 | 36.405 | Ege Denizi—[32.95 km] Datça (Muğla) | 2016-09-27T20:57:09 | 5.2 |
| 26.132 | 39.542 | Ayvacık (Çanakkale) | 2017-02-06T03:51:40 | 5.3 |
| 38.487 | 37.596 | Samsat (Adıyaman) | 2017-03-02T11:07:25 | 5.5 |
| 28.647 | 37.153 | Ula (Muğla) | 2017-04-13T16:22:16 | 5 |
| 27.816 | 38.736 | Saruhanlı (Manisa) | 2017-05-27T15:53:23 | 5.1 |
| 26.313 | 38.849 | Ege Denizi—[22.36 km] Karaburun (İzmir) | 2017-06-12T12:28:37 | 6.2 |
| 27.444 | 36.920 | Ege Denizi—[12.00 km] Bodrum (Muğla) | 2017-07-20T22:31:09 | 6.5 |
| 27.624 | 36.958 | Ege Denizi-Gökova Körfezi—[12.17 km] Bodrum (Muğla) | 2017-08-08T07:42:21 | 5.1 |
| 28.605 | 37.115 | Ula (Muğla) | 2017-11-24T21:49:14 | 5.1 |
| 38.504 | 37.584 | Samsat (Adıyaman) | 2018-04-24T00:34:29 | 5.1 |
| 31.214 | 36.054 | Akdeniz—[76.70 km] Kumluca (Antalya) | 2018-09-12T06:21:46 | 5.2 |
| 28.058 | 35.979 | Akdeniz—[72.62 km] Marmaris (Muğla) | 2019-01-24T14:30:52 | 5.1 |
| 26.426 | 39.601 | Ayvacık (Çanakkale) | 2019-02-20T18:23:28 | 5 |
| 29.434 | 37.440 | Acıpayam (Denizli) | 2019-03-20T06:34:27 | 5.5 |
| 39.121 | 38.387 | Sivrice (Elazığ) | 2019-04-04T17:31:07 | 5.2 |
| Performance Evaluation Metrics | Values |
|---|---|
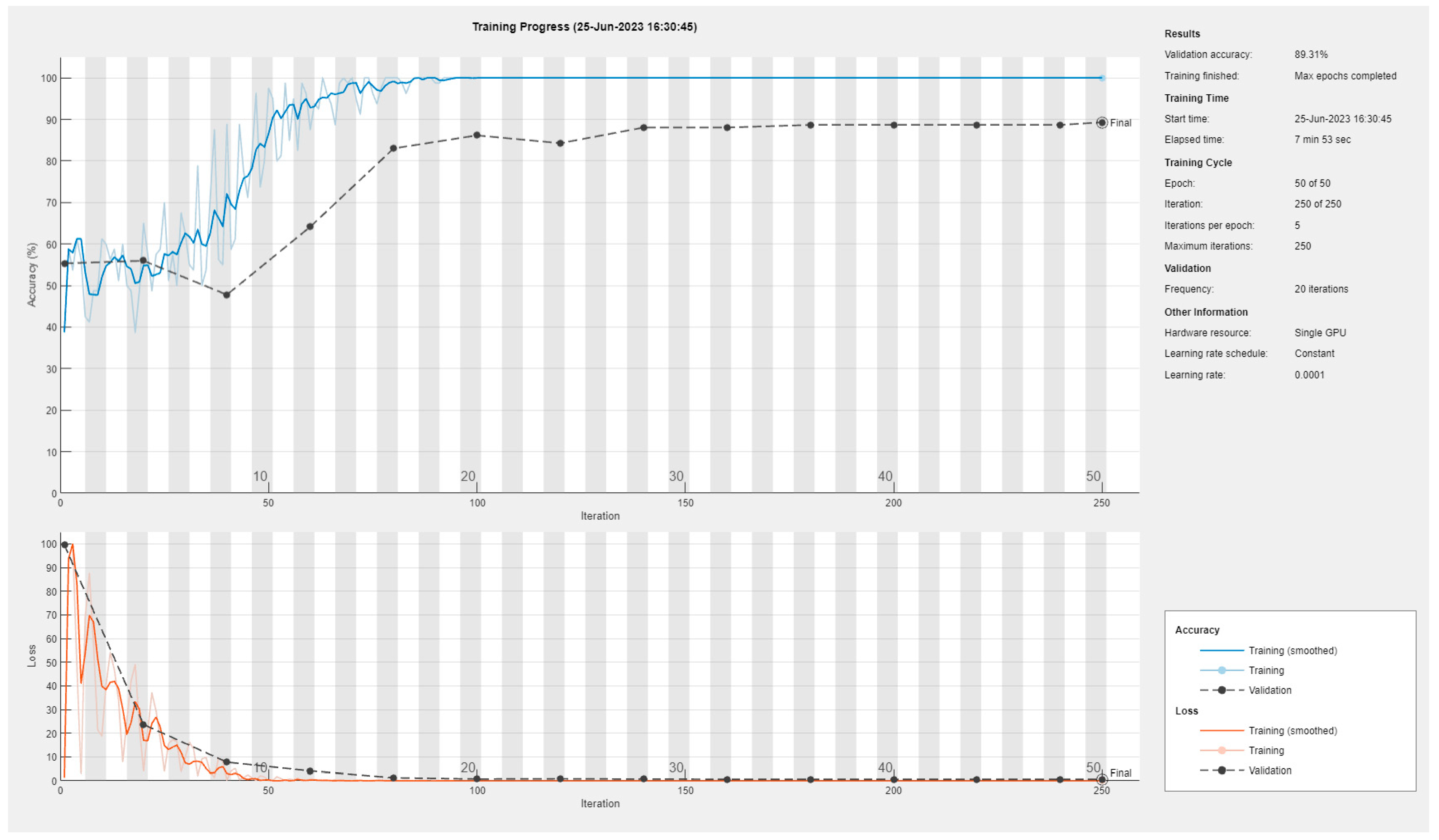
| Accuracy (%) | 89.31 |
| Sensitivity (%) | 94.32 |
| Specificity (%) | 83.10 |
| Precision (%) | 87.37 |
| F1-score (%) | 90.71 |
| Classifier | Accuracy (%) |
|---|---|
| Decision tree | 68.8 |
| SVM | 80.6 |
| kNN | 74.2 |
| 3D CNN | 83.6 |
| Proposed | 89.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uyanık, H.; Şentürk, E.; Akpınar, M.H.; Ozcelik, S.T.A.; Kokum, M.; Freeshah, M.; Sengur, A. A Multi-Input Convolutional Neural Networks Model for Earthquake Precursor Detection Based on Ionospheric Total Electron Content. Remote Sens. 2023, 15, 5690. https://doi.org/10.3390/rs15245690
Uyanık H, Şentürk E, Akpınar MH, Ozcelik STA, Kokum M, Freeshah M, Sengur A. A Multi-Input Convolutional Neural Networks Model for Earthquake Precursor Detection Based on Ionospheric Total Electron Content. Remote Sensing. 2023; 15(24):5690. https://doi.org/10.3390/rs15245690
Chicago/Turabian StyleUyanık, Hakan, Erman Şentürk, Muhammed Halil Akpınar, Salih T. A. Ozcelik, Mehmet Kokum, Mohamed Freeshah, and Abdulkadir Sengur. 2023. "A Multi-Input Convolutional Neural Networks Model for Earthquake Precursor Detection Based on Ionospheric Total Electron Content" Remote Sensing 15, no. 24: 5690. https://doi.org/10.3390/rs15245690
APA StyleUyanık, H., Şentürk, E., Akpınar, M. H., Ozcelik, S. T. A., Kokum, M., Freeshah, M., & Sengur, A. (2023). A Multi-Input Convolutional Neural Networks Model for Earthquake Precursor Detection Based on Ionospheric Total Electron Content. Remote Sensing, 15(24), 5690. https://doi.org/10.3390/rs15245690