

Underwater Hyperspectral Imaging System with Liquid Lenses

 ,
,  ,
, 

Abstract
:1. Introduction
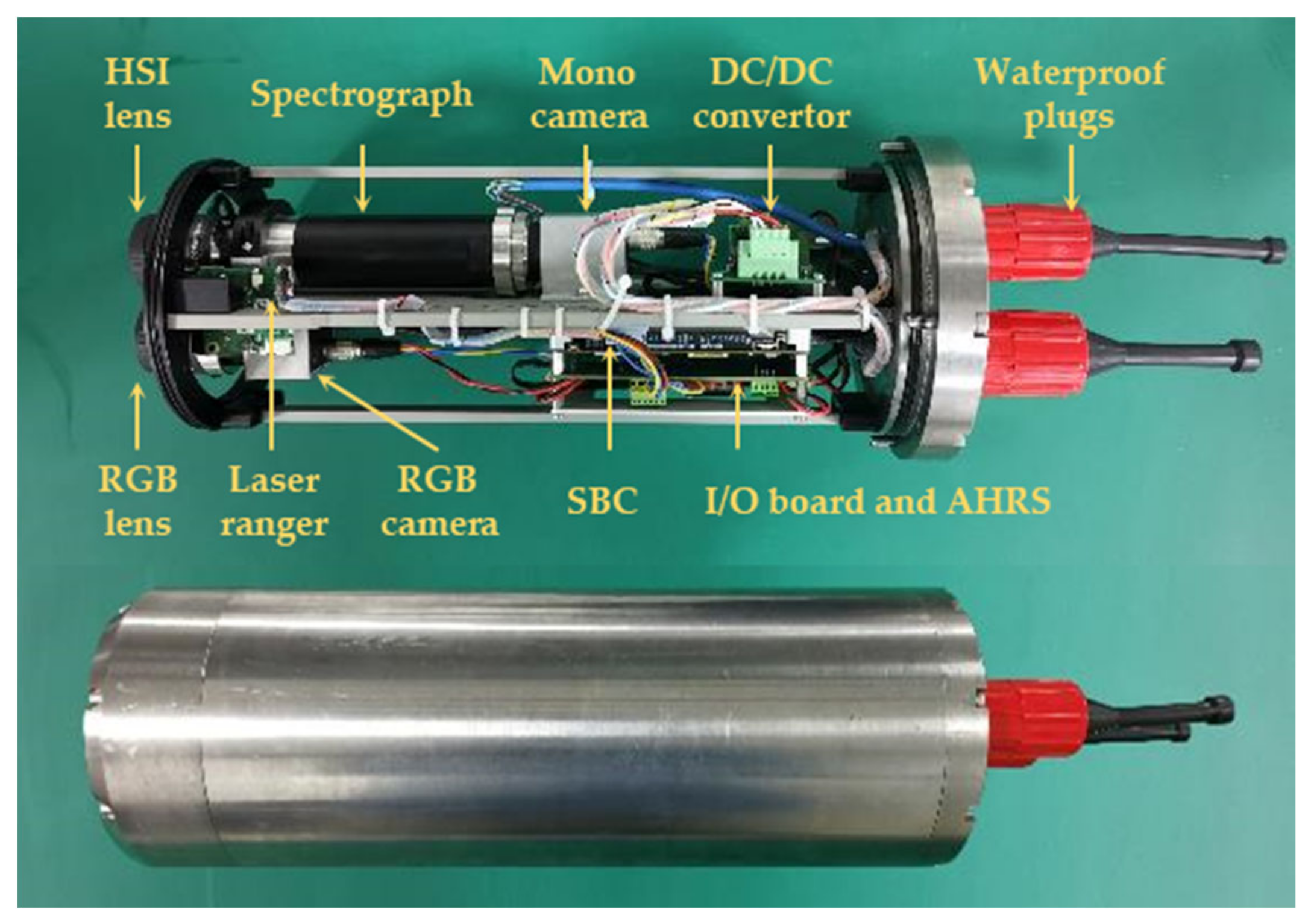
2. UHI System Design and Development
2.1. UHI System Design
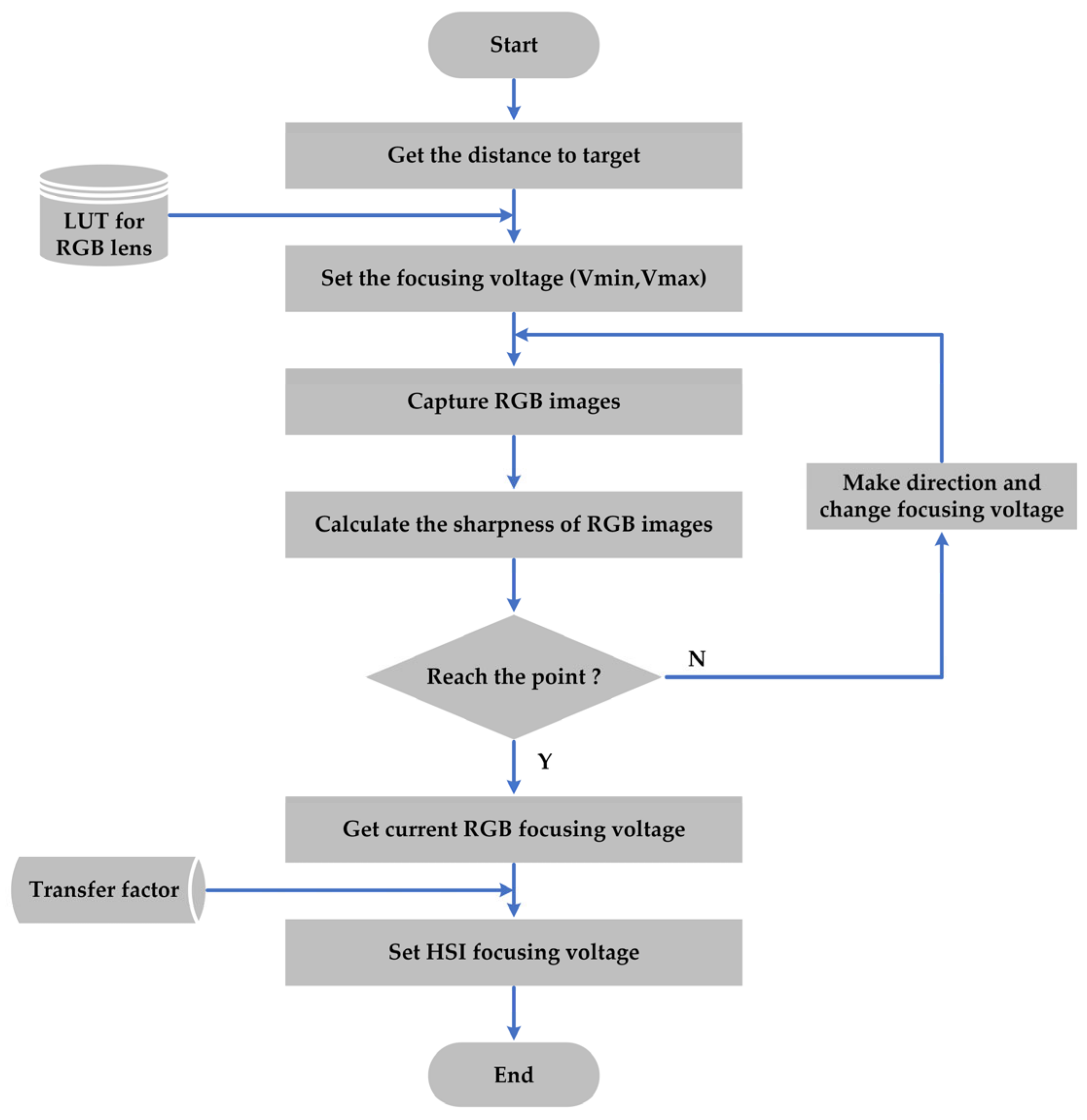
2.2. Autofocus Strategy for UHI
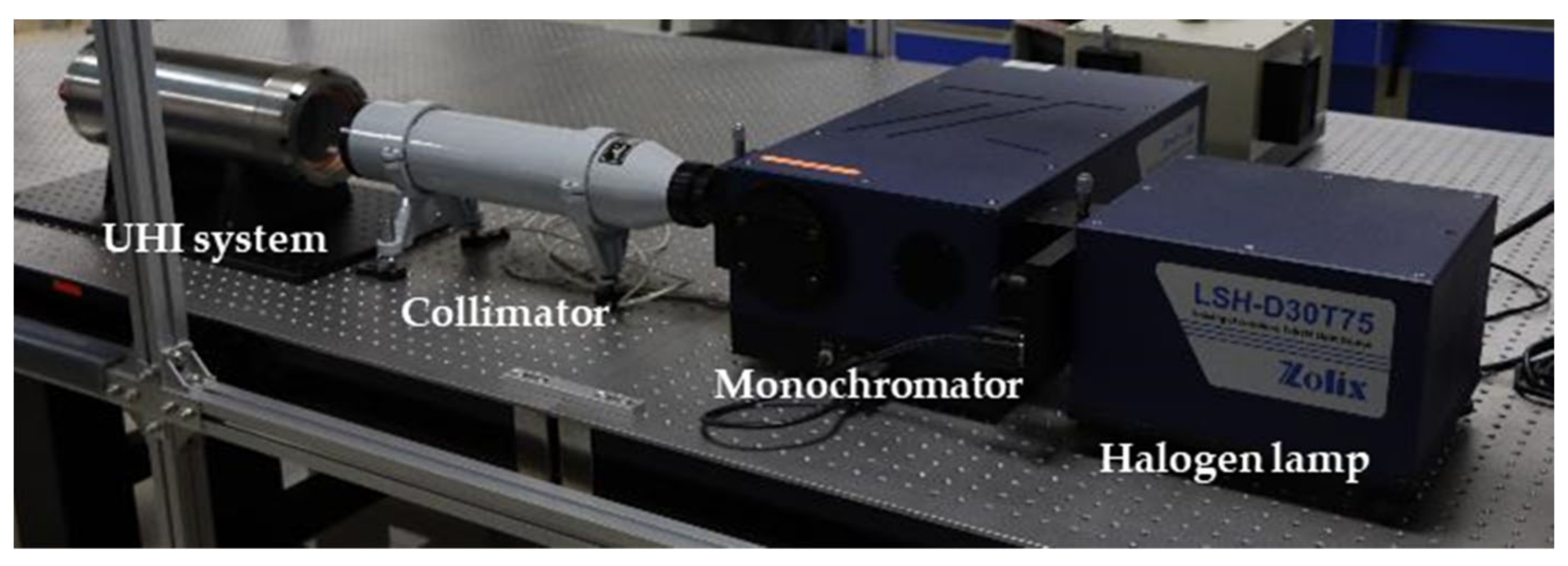
3. System Testing and Calibration
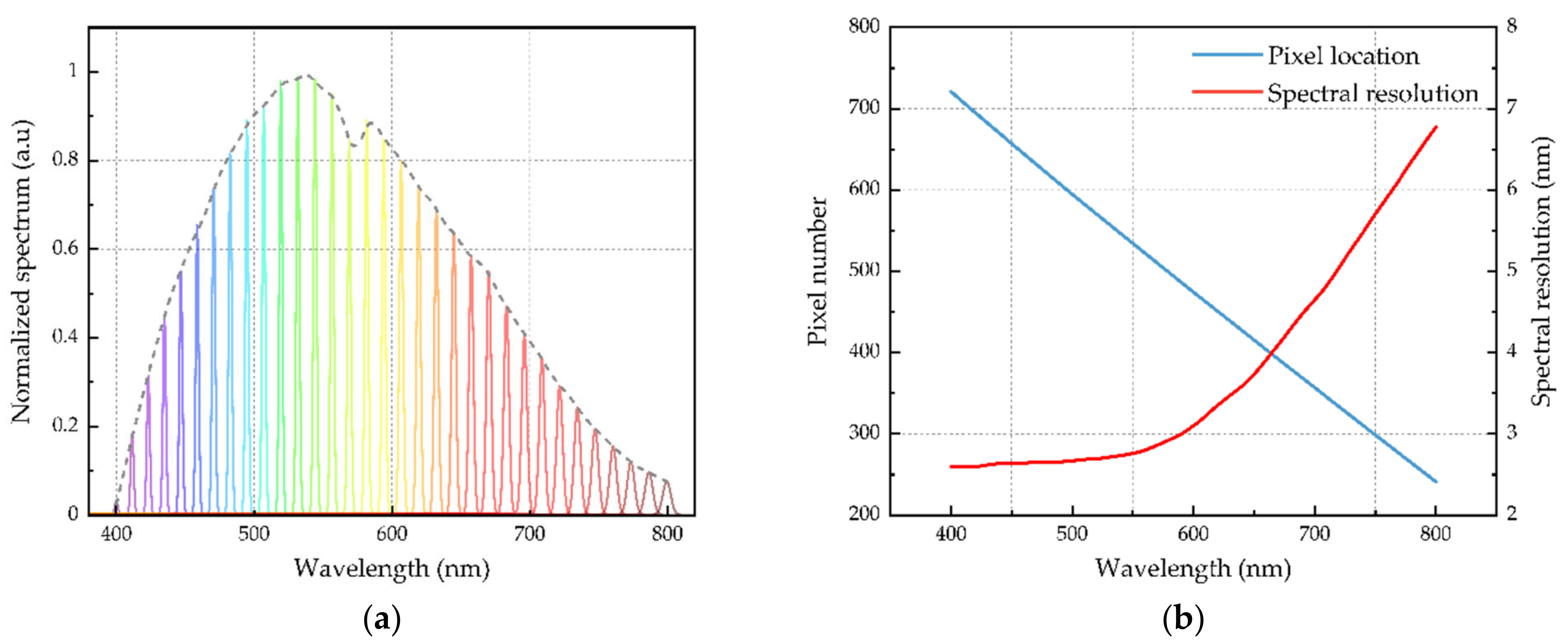
3.1. Spectral Calibration
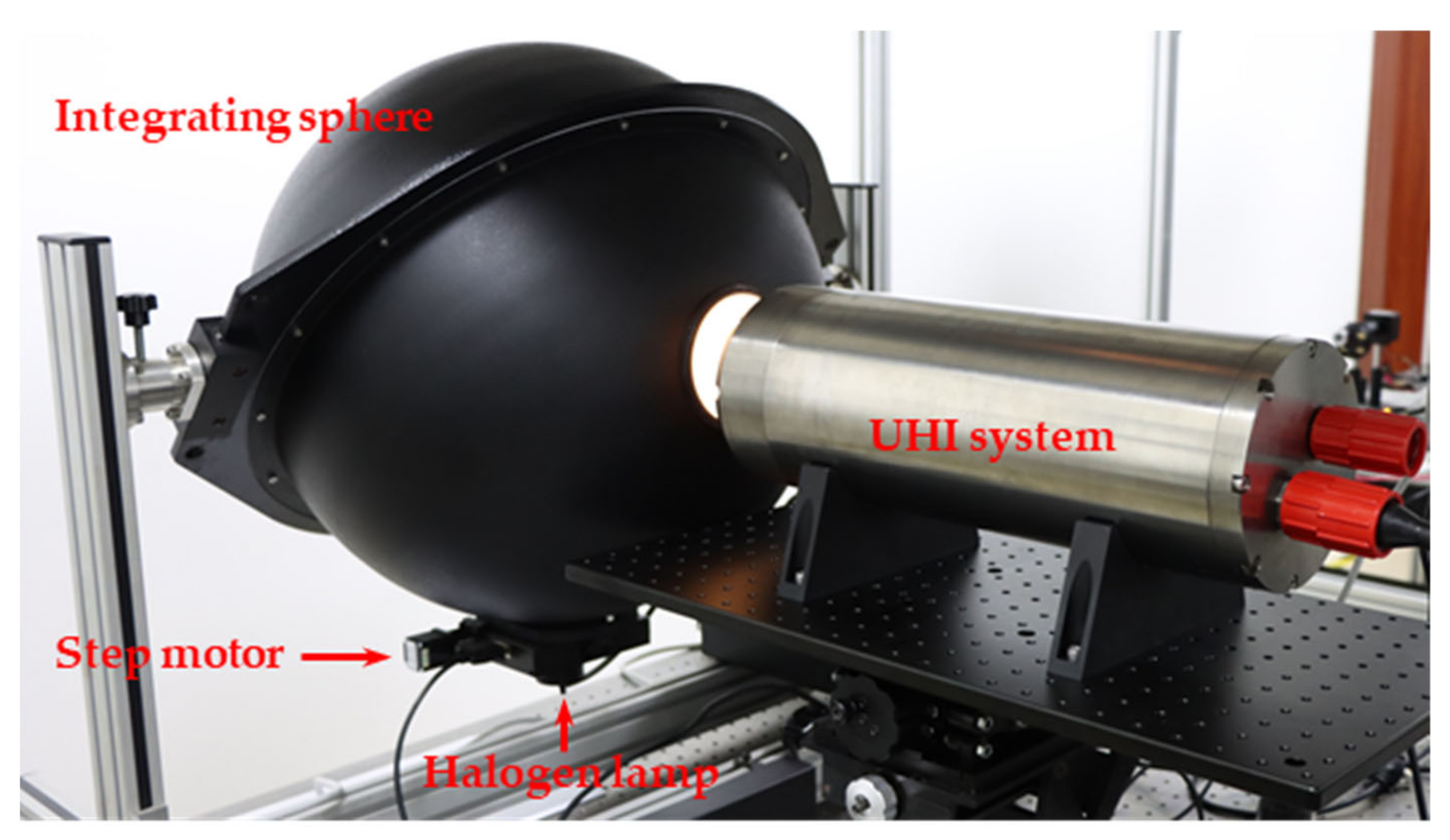
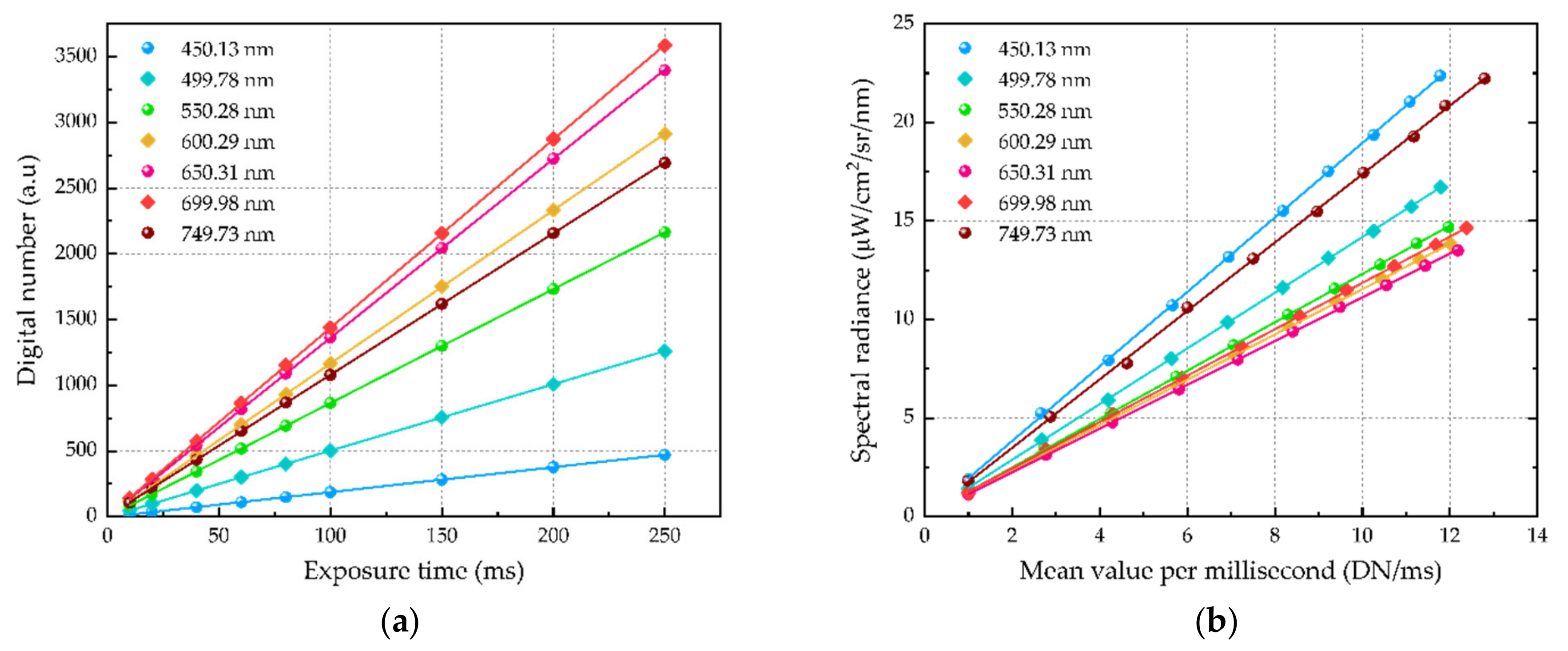
3.2. Radiometric Calibration
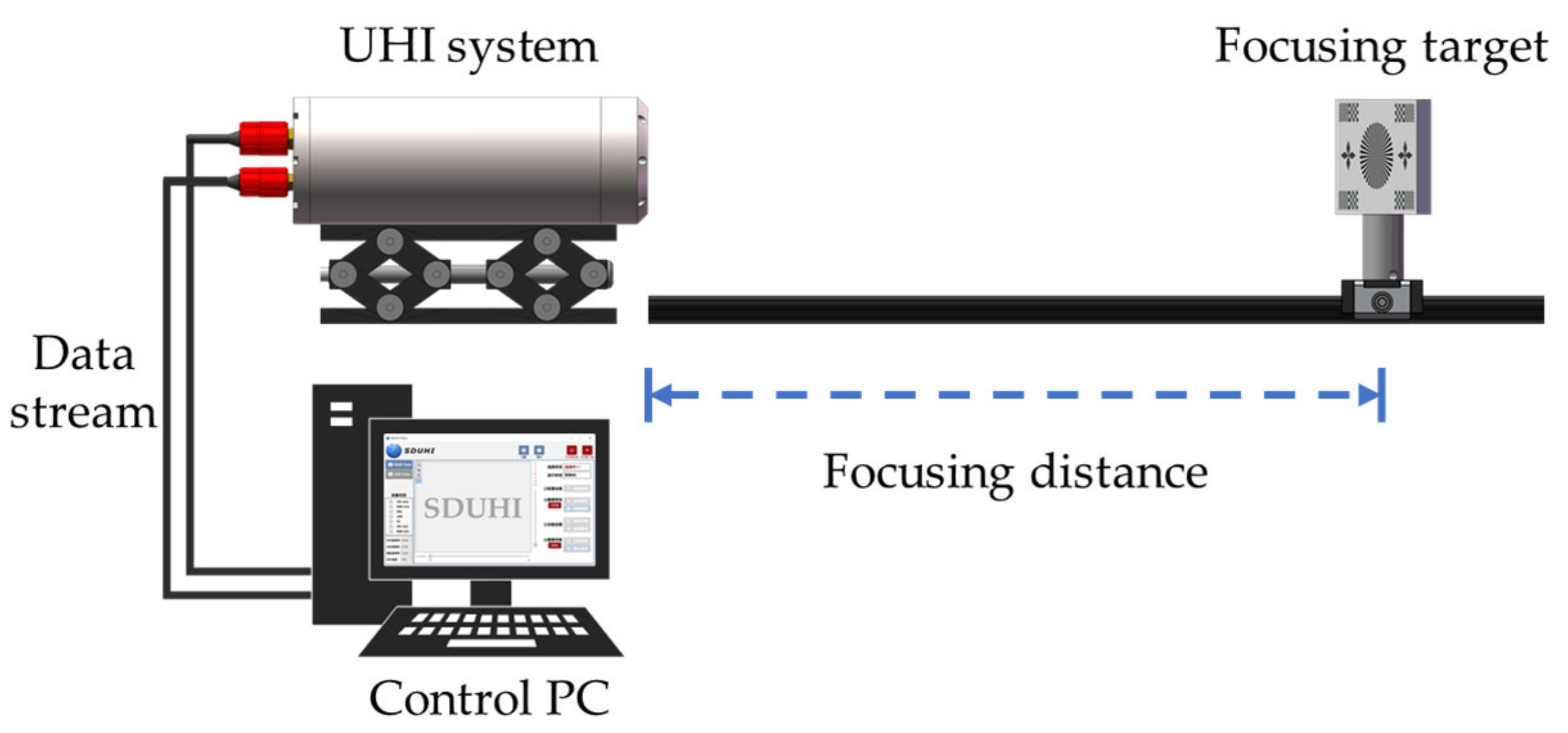
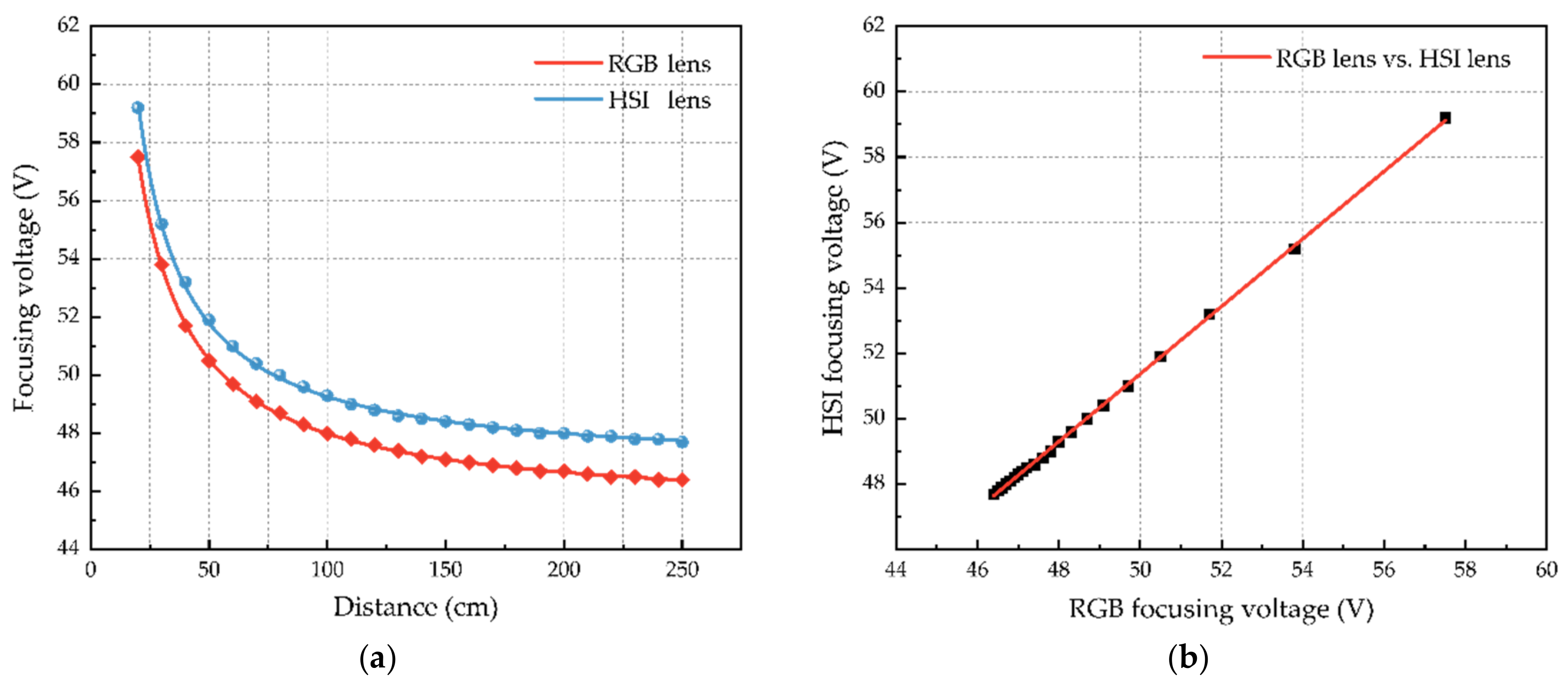
3.3. Autofocus Calibration
4. Experiment Result and Analysis
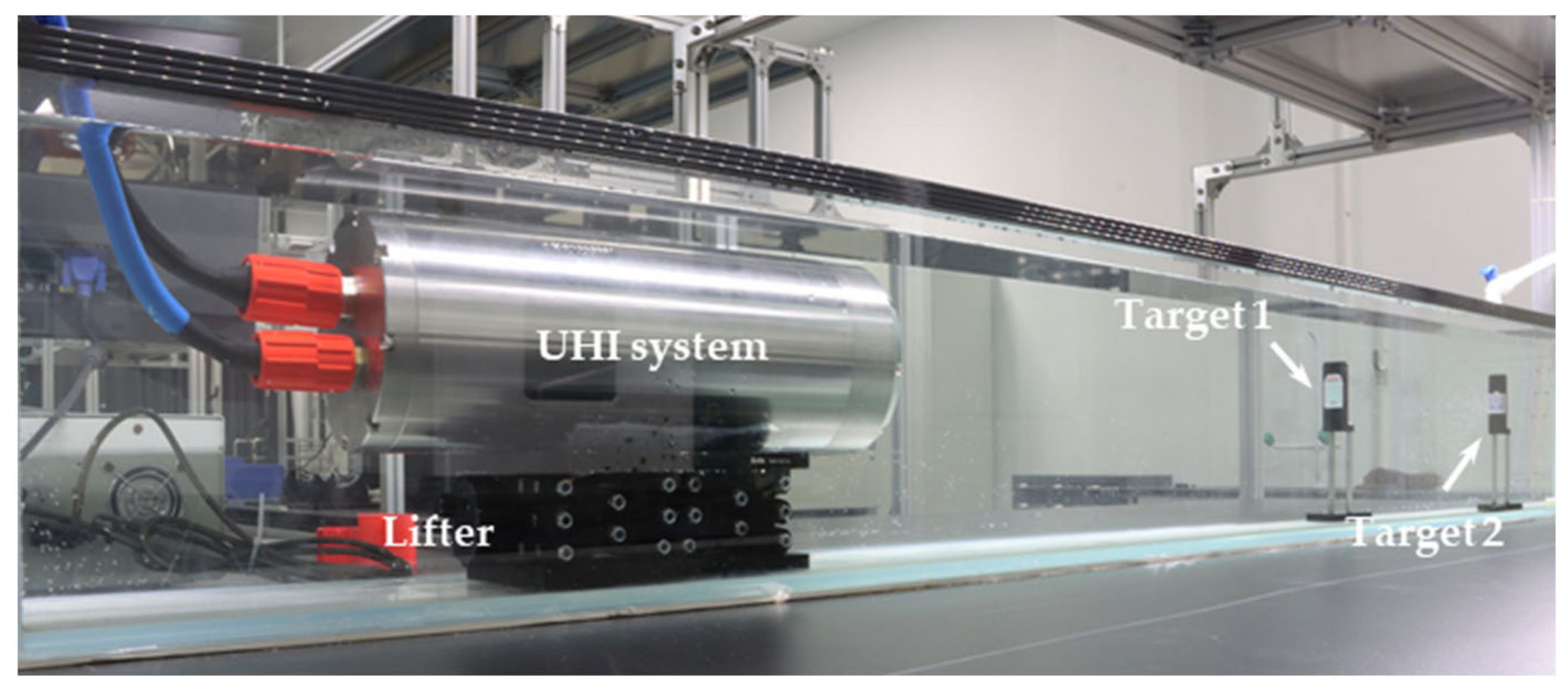
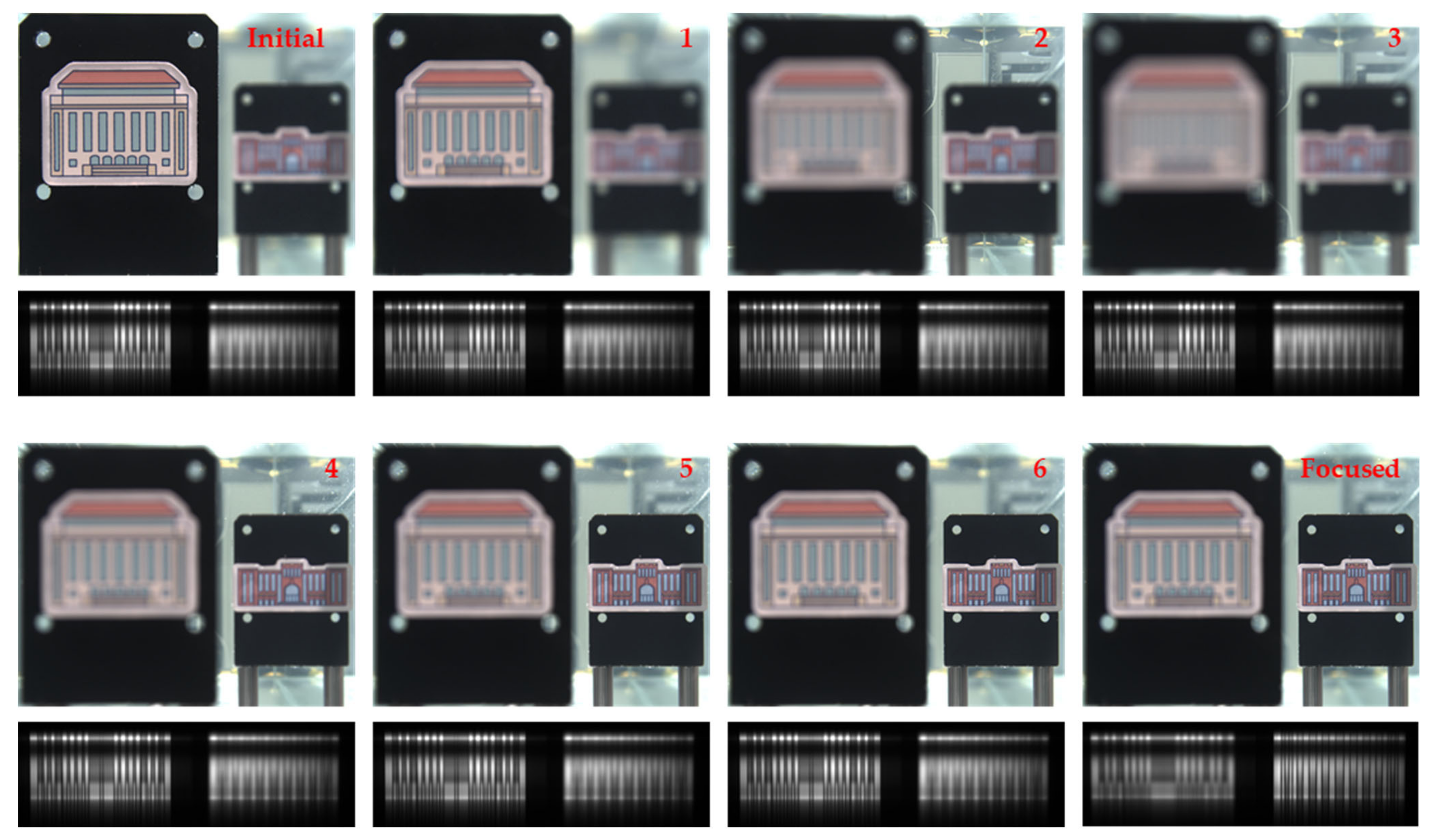
4.1. Autofocus Experiment for UHI Imager
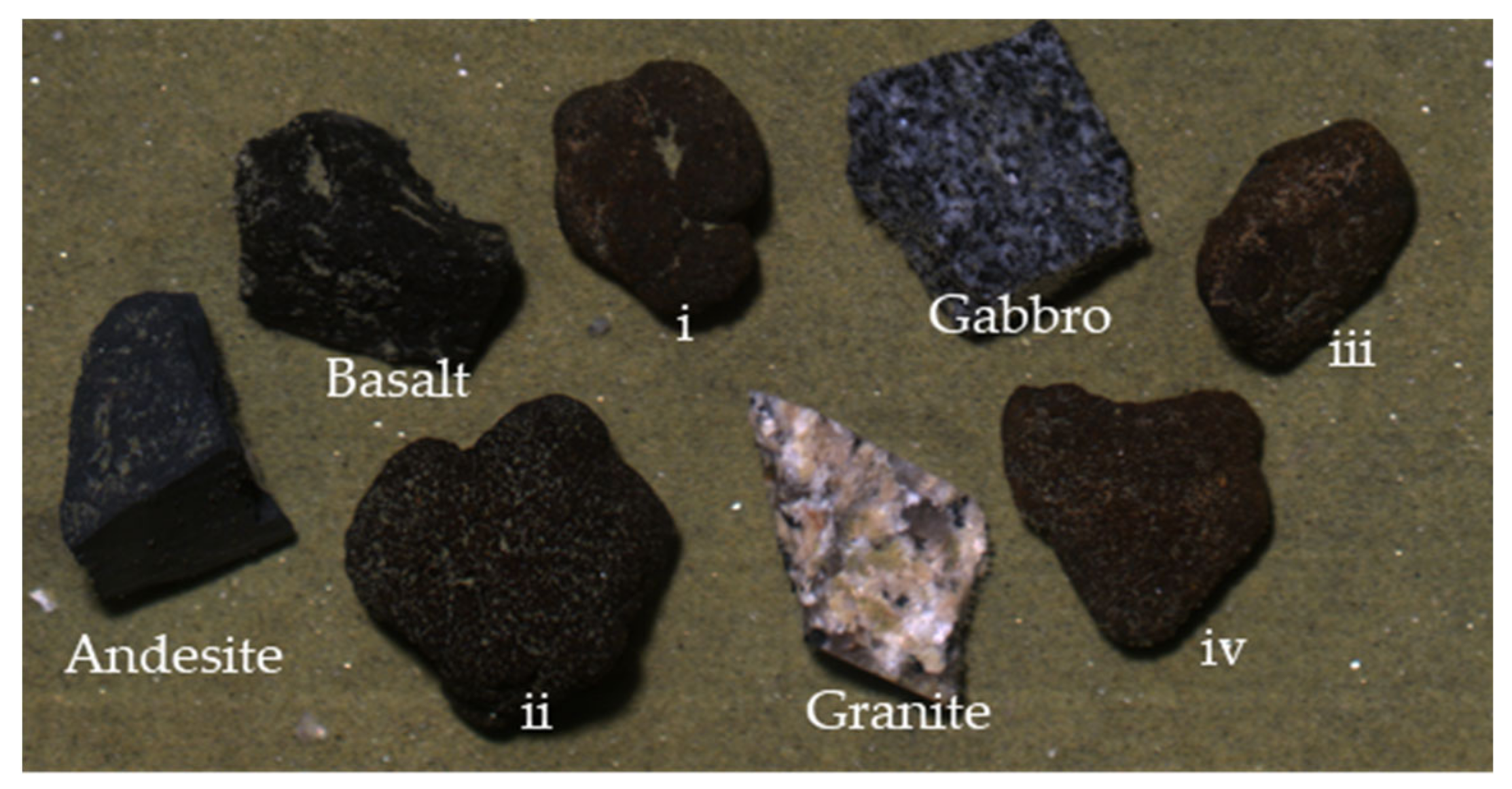
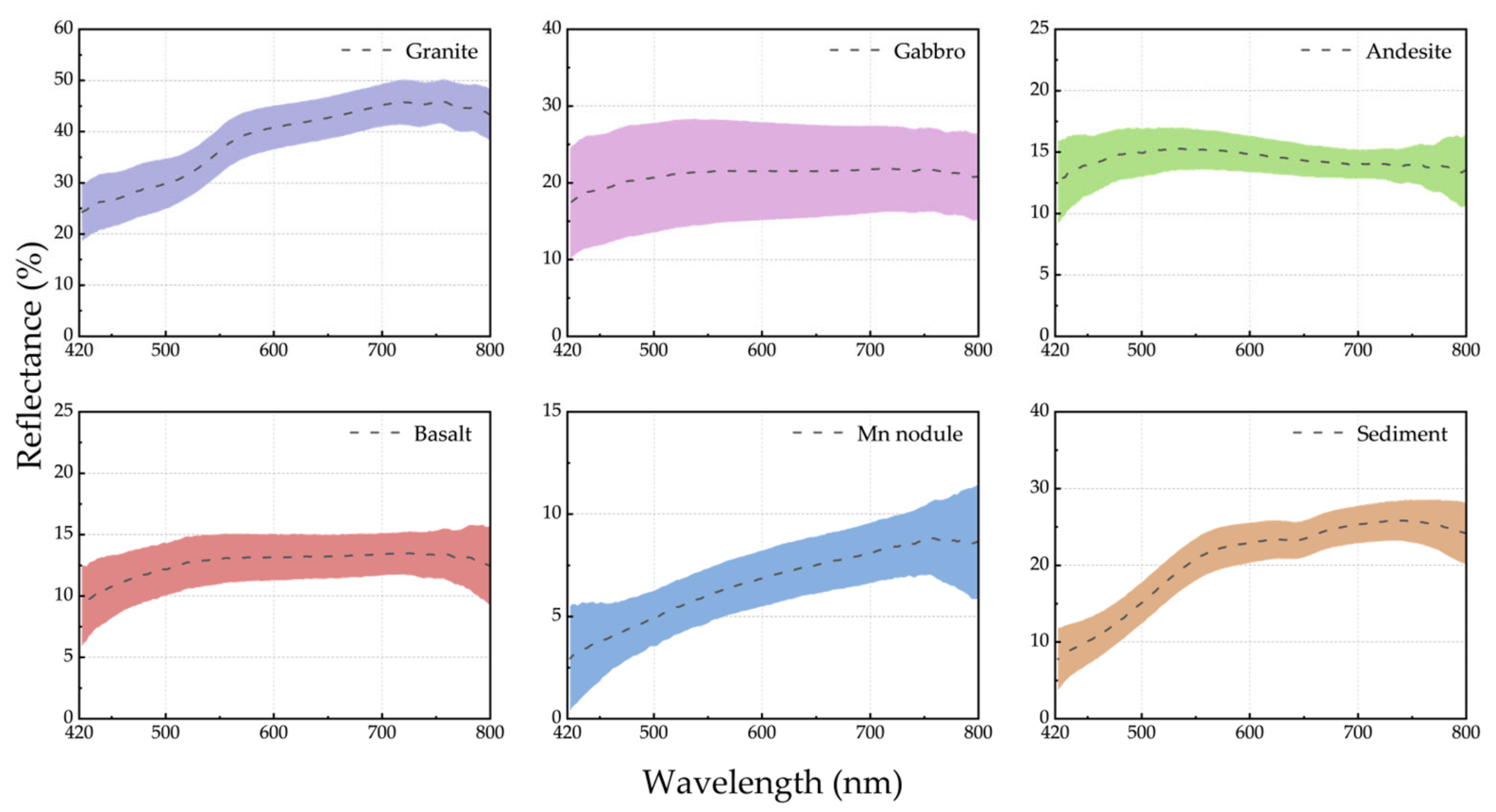
4.2. Hyperspectral Imaging Experiment
4.3. Deep-Sea Field Test for the UHI Prototype
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bracher, A.; Bouman, H.A.; Brewin, R.J.W.; Bricaud, A.; Brotas, V.; Ciotti, A.M.; Clementson, L.; Devred, E.; di Cicco, A.; Dutkiewicz, S.; et al. Obtaining Phytoplankton Diversity from Ocean Color: A Scientific Roadmap for Future Development. Front. Mar. Sci. 2017, 4, 55. [Google Scholar] [CrossRef] [Green Version]
- Emberton, S.; Chittka, L.; Cavallaro, A.; Wang, M. Sensor Capability and Atmospheric Correction in Ocean Colour Remote Sensing. Remote Sens. 2016, 8, 1. [Google Scholar] [CrossRef] [Green Version]
- Bajjouk, T.; Mouquet, P.; Ropert, M.; Quod, J.-P.; Hoarau, L.; Bigot, L.; le Dantec, N.; Delacourt, C.; Populus, J. Detection of Changes in Shallow Coral Reefs Status: Towards a Spatial Approach Using Hyperspectral and Multispectral Data. Ecol. Indic. 2019, 96, 174–191. [Google Scholar] [CrossRef]
- Marcello, J.; Eugenio, F.; Martín, J.; Marqués, F. Seabed Mapping in Coastal Shallow Waters Using High Resolution Multispectral and Hyperspectral Imagery. Remote Sens. 2018, 10, 1208. [Google Scholar] [CrossRef] [Green Version]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the Art Satellite and Airborne Marine Oil Spill Remote Sensing: Application to the BP Deepwater Horizon Oil Spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef] [Green Version]
- Dierssen, H.; McManus, G.B.; Chlus, A.; Qiu, D.; Gao, B.-C.; Lin, S. Space Station Image Captures a Red Tide Ciliate Bloom at High Spectral and Spatial Resolution. Proc. Natl. Acad. Sci. USA 2015, 112, 14783–14787. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Montes-Herrera, J.C.; Cimoli, E.; Cummings, V.; Hill, N.; Lucieer, A.; Lucieer, V. Underwater Hyperspectral Imaging (UHI): A Review of Systems and Applications for Proximal Seafloor Ecosystem Studies. Remote Sens. 2021, 13, 3451. [Google Scholar] [CrossRef]
- Liu, B.; Liu, Z.; Men, S.; Li, Y.; Ding, Z.; He, J.; Zhao, Z. Underwater Hyperspectral Imaging Technology and Its Applications for Detecting and Mapping the Seafloor: A Review. Sensors 2020, 20, 4962. [Google Scholar] [CrossRef]
- Johnsen, G.; Ludvigsen, M.; Sørensen, A.; Sandvik Aas, L.M. The Use of Underwater Hyperspectral Imaging Deployed on Remotely Operated Vehicles—Methods and Applications. IFAC-PapersOnLine 2016, 49, 476–481. [Google Scholar] [CrossRef]
- Chennu, A.; Färber, P.; Volkenborn, N.; Al-Najjar, M.A.A.; Janssen, F.; de Beer, D.; Polerecky, L. Hyperspectral Imaging of the Microscale Distribution and Dynamics of Microphytobenthos in Intertidal Sediments. Limnol. Oceanogr. Methods 2013, 11, 511–528. [Google Scholar] [CrossRef]
- Song, H.; Mehdi, S.R.; Wu, C.; Li, Z.; Gong, H.; Ali, A.; Huang, H. Underwater Spectral Imaging System Based on Liquid Crystal Tunable Filter. J. Mar. Sci. Eng. 2021, 9, 1206. [Google Scholar] [CrossRef]
- Xue, Q.; Tian, Z.; Yang, B.; Liang, J.; Li, C.; Wang, F.; Li, Q. Underwater Hyperspectral Imaging System Using a Prism–Grating–Prism Structure. Appl. Opt. 2021, 60, 894. [Google Scholar] [CrossRef] [PubMed]
- Dumke, I.; Purser, A.; Marcon, Y.; Nornes, S.M.; Johnsen, G.; Ludvigsen, M.; Søreide, F. Underwater Hyperspectral Imaging as an in Situ Taxonomic Tool for Deep-Sea Megafauna. Sci. Rep. 2018, 8, 12860. [Google Scholar] [CrossRef] [Green Version]
- Cimoli, E.; Meiners, K.M.; Lucieer, A.; Lucieer, V. An Under-Ice Hyperspectral and RGB Imaging System to Capture Fine-Scale Biophysical Properties of Sea Ice. Remote Sens. 2019, 11, 2860. [Google Scholar] [CrossRef] [Green Version]
- Foglini, F.; Grande, V.; Marchese, F.; Bracchi, V.A.; Prampolini, M.; Angeletti, L.; Castellan, G.; Chimienti, G.; Hansen, I.M.; Gudmundsen, M.; et al. Application of Hyperspectral Imaging to Underwater Habitat Mapping, Southern Adriatic Sea. Sensors 2019, 19, 2261. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Sun, Z.; Liu, S.; Di, Y.; Xu, J.; Liu, C.; Xu, R.; Song, H.; Zhan, S.; Wu, J. Underwater Hyperspectral Imaging for in Situ Underwater Microplastic Detection. Sci. Total Environ. 2021, 776, 145960. [Google Scholar] [CrossRef]
- Dumke, I.; Nornes, S.M.; Purser, A.; Marcon, Y.; Ludvigsen, M.; Ellefmo, S.L.; Johnsen, G.; Soreide, F. First Hyperspectral Imaging Survey of the Deep Seafloor: High-Resolution Mapping of Manganese Nodules. Remote Sens. Environ. 2018, 209, 19–30. [Google Scholar] [CrossRef]
- Dumke, I.; Ludvigsen, M.; Ellefmo, S.L.; Soreide, F.; Johnsen, G.; Murton, B.J. Underwater Hyperspectral Imaging Using a Stationary Platform in the Trans-Atlantic Geotraverse Hydrothermal Field. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2947–2962. [Google Scholar] [CrossRef] [Green Version]
- Ødegård, Ø.; Mogstad, A.A.; Johnsen, G.; Sørensen, A.J.; Ludvigsen, M. Underwater Hyperspectral Imaging: A New Tool for Marine Archaeology. Appl. Opt. 2018, 57, 3214–3223. [Google Scholar] [CrossRef] [Green Version]
- Chennu, A.; Färber, P.; De’ath, G.; de Beer, D.; Fabricius, K.E. A Diver-Operated Hyperspectral Imaging and Topographic Surveying System for Automated Mapping of Benthic Habitats. Sci. Rep. 2017, 7, 7122. [Google Scholar] [CrossRef] [PubMed]
- Summers, N.; Johnsen, G.; Mogstad, A.; Løvås, H.; Fragoso, G.; Berge, J. Underwater Hyperspectral Imaging of Arctic Macroalgal Habitats during the Polar Night Using a Novel Mini-ROV-UHI Portable System. Remote Sens. 2022, 14, 1325. [Google Scholar] [CrossRef]
- Chen, L.; Yang, Z.; Sun, L. Fast Autofocus of Microscopy Images Based on Depth-from-Defocus. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3115–3120. [Google Scholar]
- Guo, C.; Ma, Z.; Guo, X.; Li, W.; Qi, X.; Zhao, Q. Fast Auto-Focusing Search Algorithm for a High-Speed and High-Resolution Camera Based on the Image Histogram Feature Function. Appl. Opt. 2018, 57, F44–F49. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Fan, F.; Gheisari, M.; Srivastava, G. A Novel Auto-Focus Method for Image Processing Using Laser Triangulation. IEEE Access 2019, 7, 64837–64843. [Google Scholar] [CrossRef]
- Mugele, F.; Baret, J.-C. Electrowetting: From Basics to Applications. J. Phys. Condens. Matter 2005, 17, R705. [Google Scholar] [CrossRef]
- Jian, M.; Liu, X.; Luo, H.; Lu, X.; Yu, H.; Dong, J. Underwater Image Processing and Analysis: A Review. Signal Process. Image Commun. 2021, 91, 116088. [Google Scholar] [CrossRef]
- Raveendran, S.; Patil, M.D.; Birajdar, G.K. Underwater Image Enhancement: A Comprehensive Review, Recent Trends, Challenges and Applications. Artif. Intell. Rev. 2021, 54, 5413–5467. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, D.; Zhang, W. Classical and State-of-the-Art Approaches for Underwater Image Defogging: A Comprehensive Survey. Front. Inform. Technol. Elect. Eng. 2020, 21, 1745–1769. [Google Scholar] [CrossRef]
- Jian, M.; Qi, Q.; Dong, J.; Yin, Y.; Lam, K.-M. Integrating QDWD with Pattern Distinctness and Local Contrast for Underwater Saliency Detection. J. Vis. Commun. Image Represent. 2018, 53, 31–41. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Category | Parameter | |
|---|---|---|---|
| Imager | Imager | HSI | RGB |
| F# | 4 | 2.8 | |
| Focal length | 25 mm | 16 mm | |
| FOV (transverse) | 24.8° | 38° | |
| Frame rate | 100 Hz | 75 Hz | |
| Resolution | 1920 × 1 | 2448 × 2048 | |
| Sensor | Accuracy (roll/pitch/yaw) | 0.2°/0.2°/1° | |
| Attitude data rate | 1–400 Hz | ||
| Ranging distance | 0.2–5 m | ||
| Interface | Communication | 100/1000 Mbps Ethernet | |
| Input voltage | 9–36 VDC | ||
| Power consumption | Max. 28 W (18 W typical) | ||
| Mechanism | Housing material | Titanium | |
| Size (Diameter × length) | 152 × 426 mm | ||
| Weight (air/water) | 16/10 Kg | ||
| MAX working depth | 6000 m | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Men, S.; Ding, Z.; Li, D.; Zhao, Z.; He, J.; Ju, H.; Shen, M.; Yu, Q.; Liu, Z. Underwater Hyperspectral Imaging System with Liquid Lenses. Remote Sens. 2023, 15, 544. https://doi.org/10.3390/rs15030544
Liu B, Men S, Ding Z, Li D, Zhao Z, He J, Ju H, Shen M, Yu Q, Liu Z. Underwater Hyperspectral Imaging System with Liquid Lenses. Remote Sensing. 2023; 15(3):544. https://doi.org/10.3390/rs15030544
Chicago/Turabian StyleLiu, Bohan, Shaojie Men, Zhongjun Ding, Dewei Li, Zhigang Zhao, Jiahao He, Haochen Ju, Mengling Shen, Qiuyuan Yu, and Zhaojun Liu. 2023. "Underwater Hyperspectral Imaging System with Liquid Lenses" Remote Sensing 15, no. 3: 544. https://doi.org/10.3390/rs15030544
APA StyleLiu, B., Men, S., Ding, Z., Li, D., Zhao, Z., He, J., Ju, H., Shen, M., Yu, Q., & Liu, Z. (2023). Underwater Hyperspectral Imaging System with Liquid Lenses. Remote Sensing, 15(3), 544. https://doi.org/10.3390/rs15030544