



Crown-Level Structure and Fuel Load Characterization from Airborne and Terrestrial Laser Scanning in a Longleaf Pine (Pinus palustris Mill.) Forest Ecosystem
 ,
,  ,
,  ,
,  , , ,
, , ,  , , ,
, , , 
Abstract
:1. Introduction
2. Materials and Methods
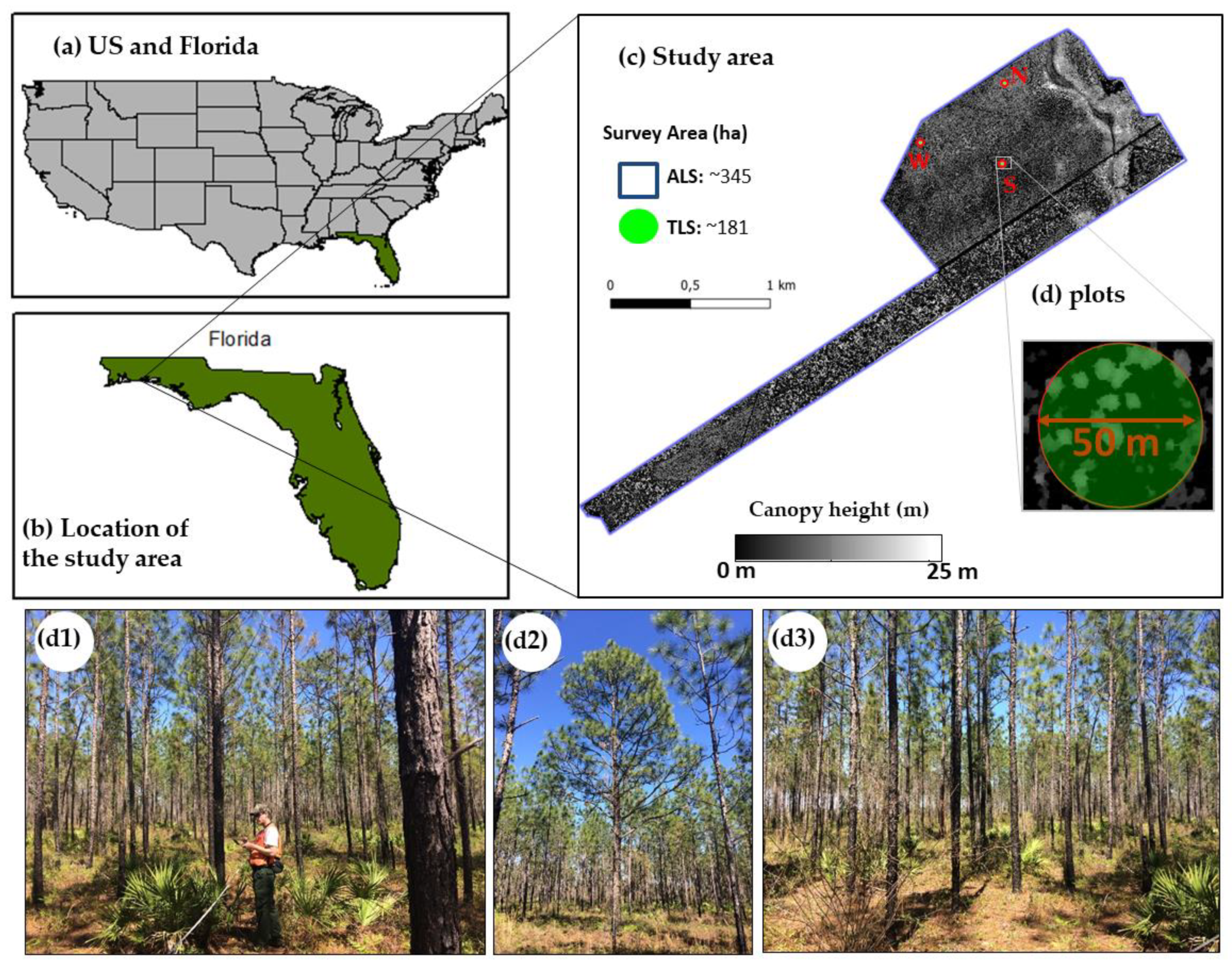
2.1. Study Area
2.2. Field Data Collection
2.3. ALS Survey
2.4. TLS Survey
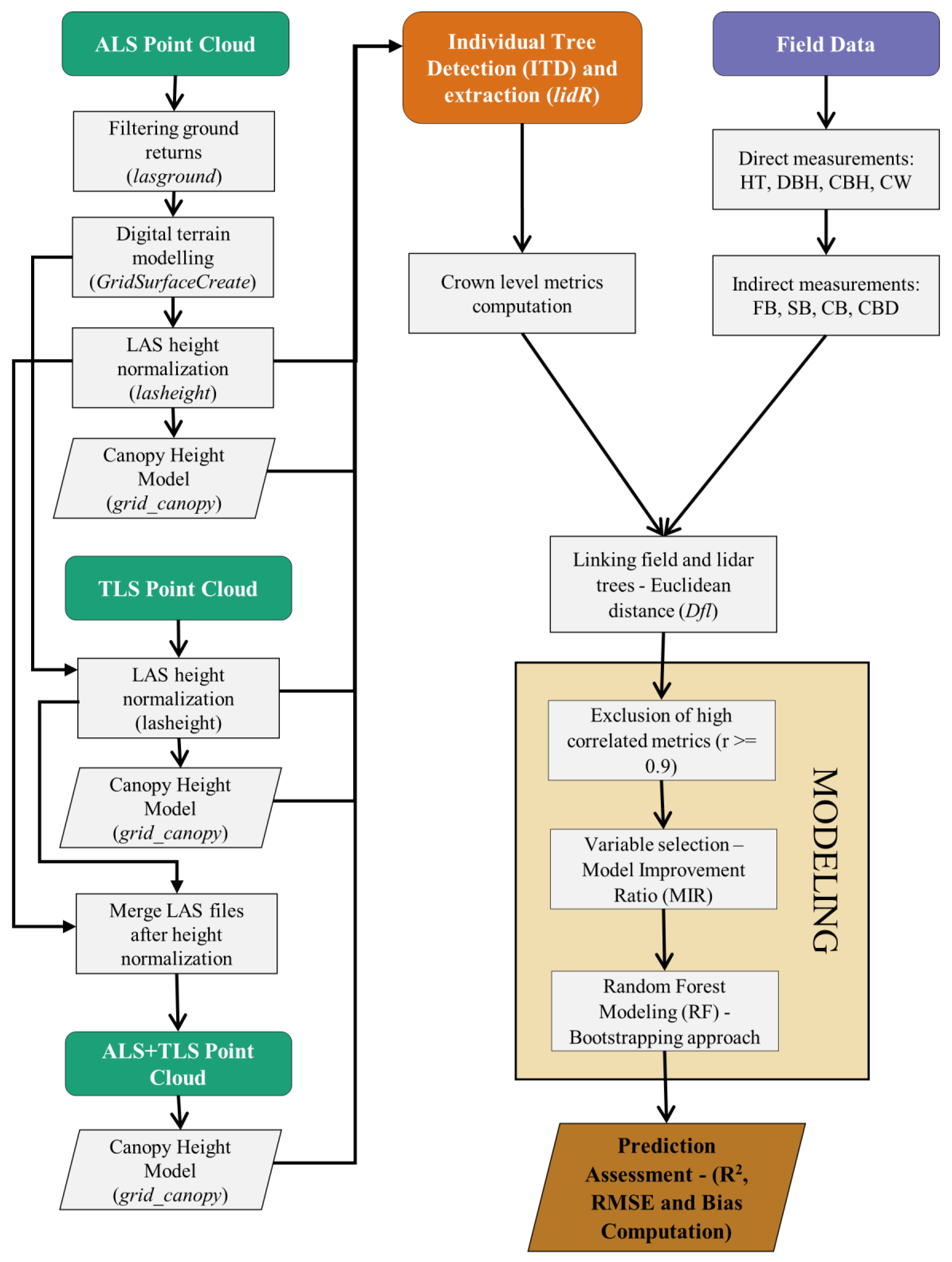
2.5. ALS and TLS Data Pre-Processing
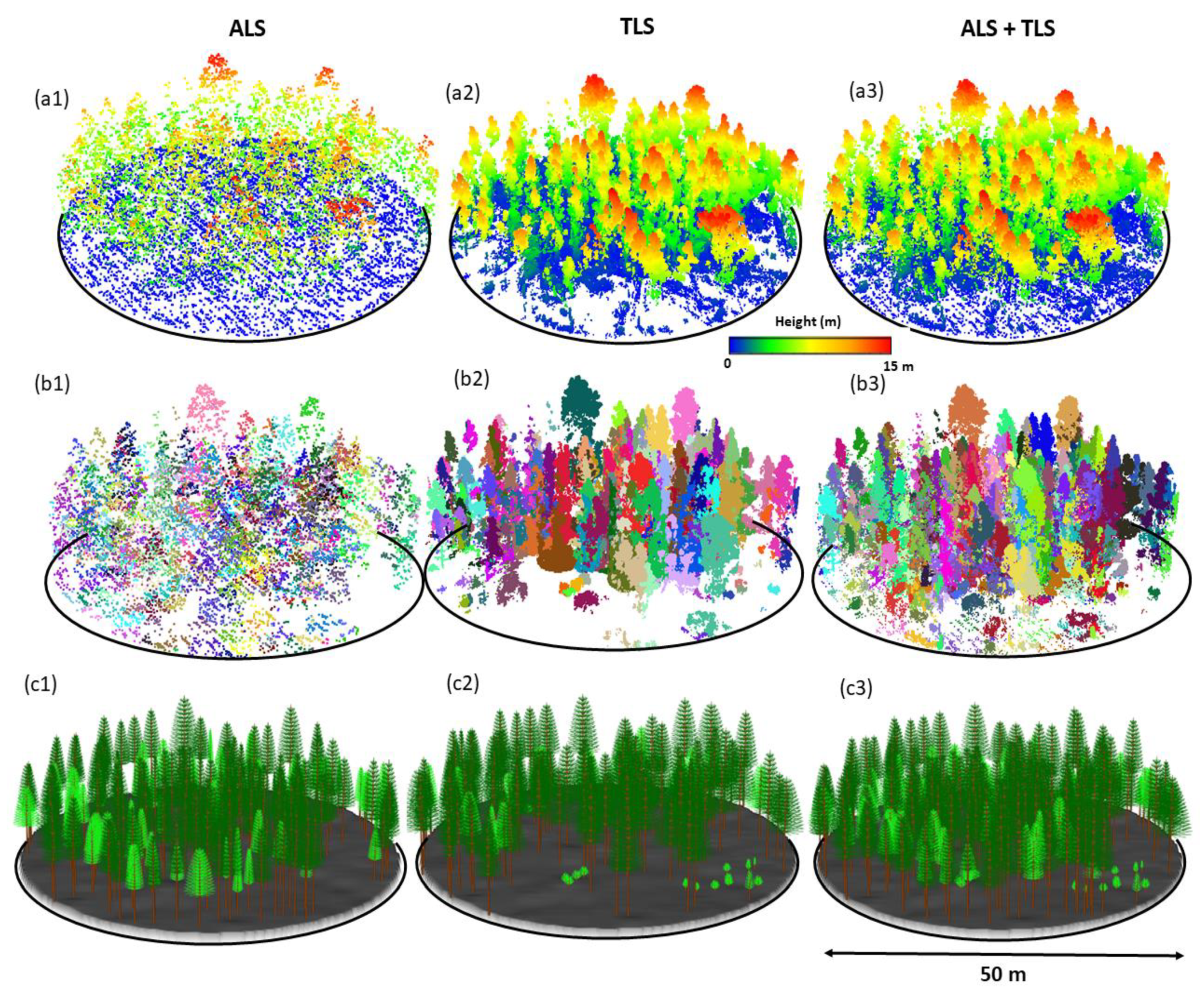
2.6. Individual Tree Detection and Crown-Level Metrics
2.7. Crown-Level Structural and Fuel Load Attributes Modeling
2.7.1. Linking Field and Lidar Detected Trees
2.7.2. Variable Selection and Random Forest Modeling
3. Results
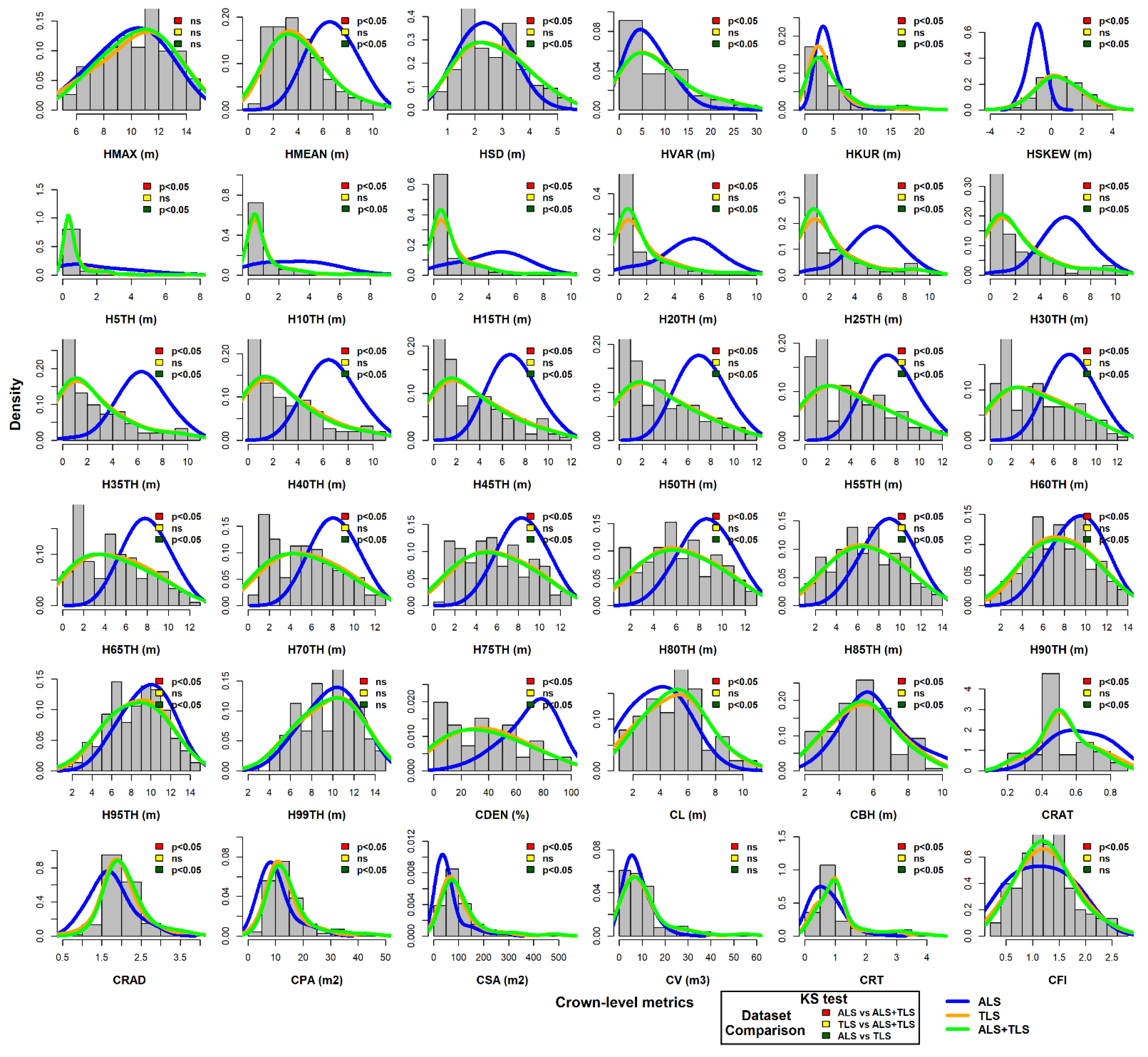
3.1. Individual Tree Detection and Crown-Level Metrics
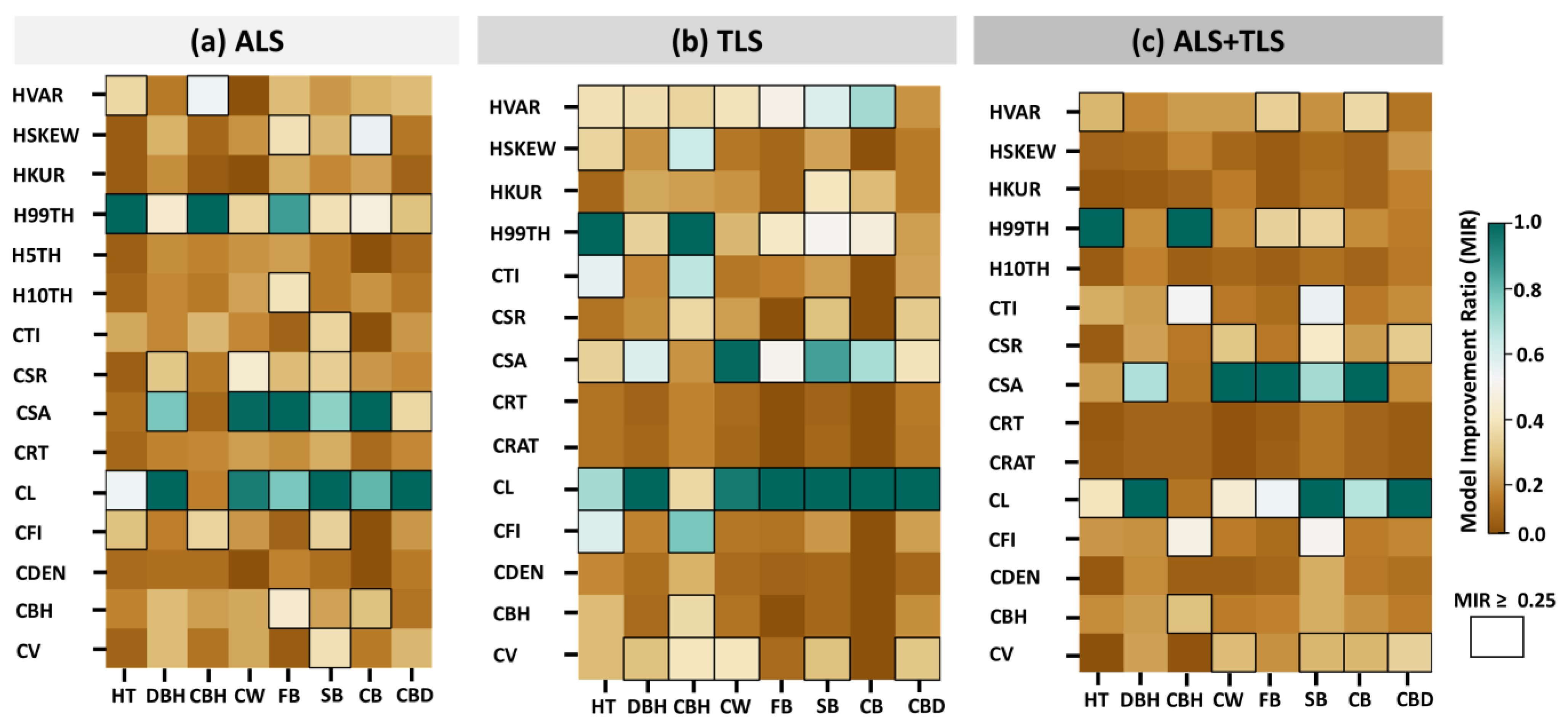
3.2. Variable Selection
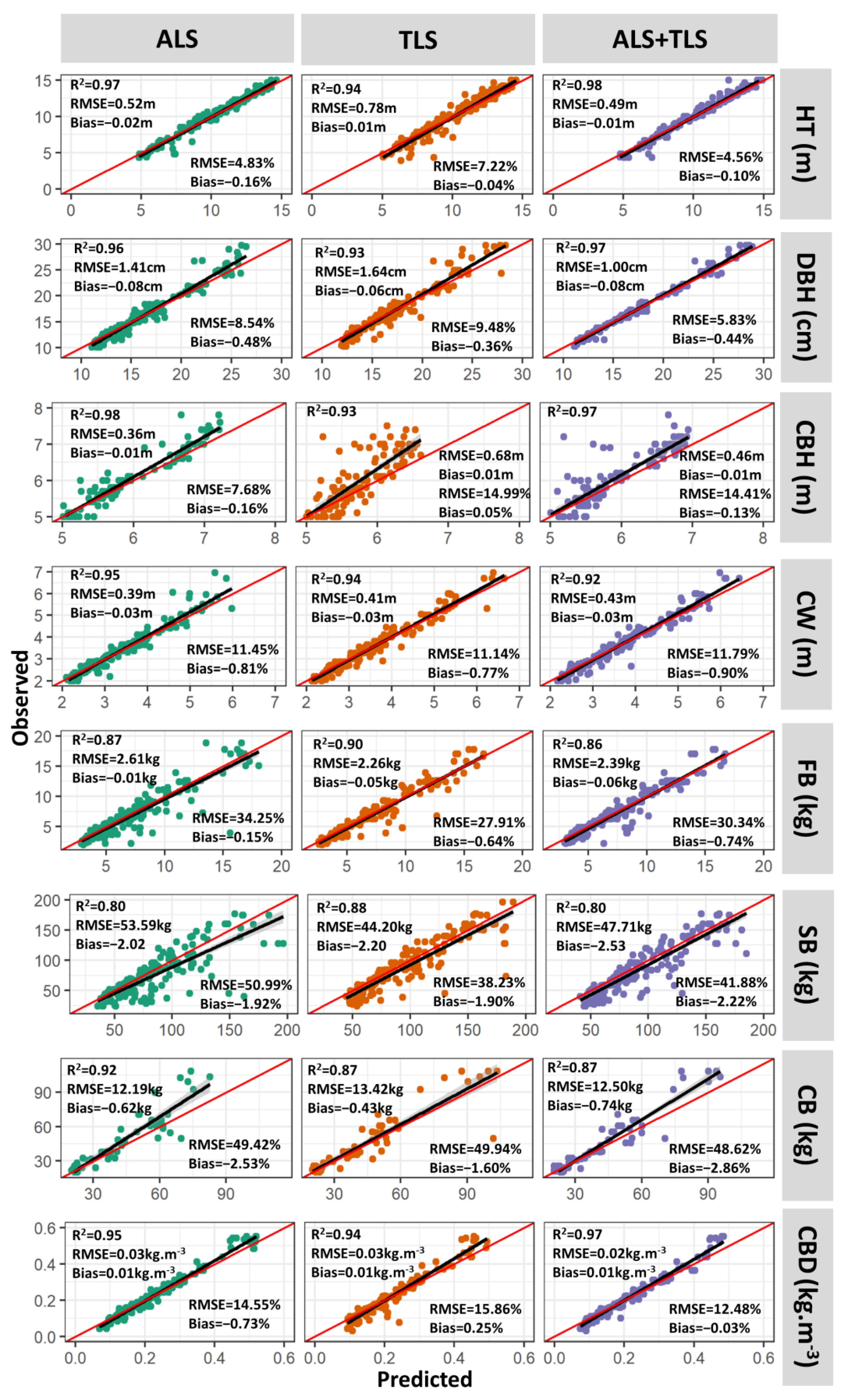
3.3. Random Forest Model Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sharma, N.; Rowe, R. Managing the world’s forests. Financ. Dev. 1992, 29, 31–33. [Google Scholar]
- Keenan, R.J.; Reams, G.A.; Achard, F.; de Freitas, J.V.; Grainger, A.; Lindquist, E. Dynamics of global forest area: Results from the FAO Global Forest Resources Assessment 2015. For. Ecol. Manag. 2015, 352, 9–20. [Google Scholar] [CrossRef]
- Krieger, D.J. Economic Value of Forest Ecosystem Services: A Review; The Wilderness Society: Washington, DC, USA, 2001. [Google Scholar]
- Roise, J.; Harnish, K.; Mohan, M.; Scolforo, H.; Chung, J.; Kanieski, B.; Catts, G.P.; McCarter, J.B.; Posse, J.; Shen, T. Valuation and production possibilities on a working forest using multi-objective programming, Woodstock, timber NPV, and carbon storage and sequestration. Scand. J. For. Res. 2016, 31, 674–680. [Google Scholar] [CrossRef]
- Thompson, I.D.; Okabe, K.; Tylianakis, J.; Kumar, P.; Brockerhoff, E.G.; Schellhorn, N.A.; Parrotta, J.; Nasi, R. Forest Biodiversity and the Delivery of Ecosystem Goods and Services: Translating Science into Policy. Bioscience 2011, 61, 972–981. [Google Scholar] [CrossRef]
- Vastaranta, M.; Saarinen, N.; Yrttimaa, T.; Kankare, V. Individual Tree Detection and Characterization Using 3D Remote Sensing. EarthArXiv 2020. submitted. [Google Scholar]
- Gonzalez-Benecke, C.A.; Gezan, S.A.; Samuelson, L.J.; Cropper, W.P.; LeDuc, D.J.; Martin, T.A. Estimating Pinus palustris tree diameter and stem volume from tree height, crown area and stand-level parameters. J. For. Res. 2014, 25, 43–52. [Google Scholar] [CrossRef]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of Individual Longleaf Pine (Pinus palustrisMill.) Tree Attributes from Field and LiDAR Data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Oswalt, C.M.; Cooper, J.A.; Brockway, D.G.; Brooks, H.W.; Walker, J.L.; Connor, K.F.; Oswalt, S.N.; Conner, R.C. History and Current Condition of Longleaf Pine in the Southern United States; General Technical Report; Southern Research Station, USDA Forest Service: Asheville, NC, USA, 2012. [Google Scholar]
- Clark, K.E.; Chin, E.; Peterson, M.N.; Lackstrom, K.; Dow, K.; Foster, M.; Cubbage, F. Evaluating Climate Change Planning for Longleaf Pine Ecosystems in the Southeast United States. J. Southeast. Assoc. Fish Wildl. Agencies 2018, 5, 160–168. [Google Scholar]
- Fox, D.A. Sabal Palmetto: Investigating the Ecological Importance of Florida’s State Tree. Doctoral Dissertation, University of Florida, Gainesville, FL, USA, 2015. [Google Scholar]
- Guyer, C.; Bailey, M.A. Amphibians and Reptiles of Longleaf Pine Communities. In Proceedings of the Tall Timbers Fire Ecology Conference, Tallahassee, FL, USA, 3–6 November 1993; Volume 18, pp. 139–158. [Google Scholar]
- Mohan, M.; Catts, G.P.; Vaughan, B.; Roise, J.P.; Silva, C.A.; McCarter, J.B.; Jat, P.; Jaafar, W.S.W.M.; Gopan, G.; Maulud, K.N.A. What Makes a Location into a “Favorable Habitat” under Changing Climate and Environmental Conditions? A Pilot Study Focused on Exploring the Differences between Natural and Non-natural Habitats using Airborne LiDAR. IOP Conf. Ser. Earth Environ. Sci. 2019, 228, 012018. [Google Scholar] [CrossRef]
- Silva, C.A.; Klauberg, C.; e Carvalho, S.P.C.; Hudak, A.T. Mapping aboveground carbon stocks using LiDAR data in Eucalyptus spp. plantations in the state of Sao Paulo, Brazil. Sci. For. 2014, 42, 591–604. [Google Scholar]
- Silva, C.A.; Klauberg, C.; Hudak, A.T.; Vierling, L.A.; Liesenberg, V.; e Carvalho, S.P.C.; Rodriguez, L.C.E. A principal component approach for predicting the stem volume in Eucalyptus plantations in Brazil using airborne LiDAR data. For. Int. J. For. Res. 2016, 89, 422–433. [Google Scholar] [CrossRef]
- Jung, S.-E.; Kwak, D.-A.; Park, T.; Lee, W.-K.; Yoo, S. Estimating Crown Variables of Individual Trees Using Airborne and Terrestrial Laser Scanners. Remote Sens. 2011, 3, 2346–2363. [Google Scholar] [CrossRef]
- Liu, L.; Pang, Y.; Li, Z.; Si, L.; Liao, S. Combining Airborne and Terrestrial Laser Scanning Technologies to Measure Forest Understorey Volume. Forests 2017, 8, 111. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B. Selection of Remotely Sensed Data. In Remote Sensing of Forest Environments; Springer: Boston, MA, USA, 2003; pp. 13–46. [Google Scholar]
- van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Jaafar, W.S.W.M.; Woodhouse, I.H.; Silva, C.A.; Omar, H.; Maulud, K.N.A.; Hudak, A.T.; Klauberg, C.; Cardil, A.; Mohan, M. Improving Individual Tree Crown Delineation and Attributes Estimation of Tropical Forests Using Airborne LiDAR Data. Forests 2018, 9, 759. [Google Scholar] [CrossRef]
- Silva, C.A.; Valbuena, R.; Pinagé, E.R.; Mohan, M.; De Almeida, D.R.A.; Broadbent, E.N.; Jaafar, W.S.W.M.; Papa, D.D.A.; Cardil, A.; Klauberg, C. F orest G ap R: An r Package for forest gap analysis from canopy height models. Methods Ecol. Evol. 2019, 10, 1347–1356. [Google Scholar] [CrossRef]
- Hentz, M.K.; Silva, C.A.; Corte, A.P.D.; Netto, S.P.; Strager, M.P.; Klauberg, C. Estimating forest uniformity in Eucalyptus spp. and Pinus taeda L. stands using field measurements and structure from motion point clouds generated from unmanned aerial vehicle (UAV) data collection. For. Syst. 2018, 27, e005. [Google Scholar] [CrossRef]
- Almeida, D.; Stark, S.; Chazdon, R.; Nelson, B.; Cesar, R.; Meli, P.; Gorgens, E.; Duarte, M.; Valbuena, R.; Moreno, V.; et al. The effectiveness of lidar remote sensing for monitoring forest cover attributes and landscape restoration. For. Ecol. Manag. 2019, 438, 34–43. [Google Scholar] [CrossRef]
- Wulder, M.A.; Bater, C.W.; Coops, N.C.; Hilker, T.; White, J.C. The role of LiDAR in sustainable forest management. For. Chron. 2008, 84, 807–826. [Google Scholar] [CrossRef]
- Hilker, T.; van Leeuwen, M.; Coops, N.C.; Wulder, M.A.; Newnham, G.J.; Jupp, D.L.B.; Culvenor, D.S. Comparing canopy metrics derived from terrestrial and airborne laser scanning in a Douglas-fir dominated forest stand. Trees 2010, 24, 819–832. [Google Scholar] [CrossRef]
- Kwak, O.-A.; Chung, J.; Lee, W.-K.; Kafatos, M.; Lee, S.Y.; Cho, H.-K.; Lee, S.-H. Evaluation for Damaged Degree of Vegetation by Forest Fire using Lidar and a Digital Aerial Photograph. Photogramm. Eng. Remote Sens. 2010, 76, 277–287. [Google Scholar] [CrossRef]
- Trochta, J.; Král, K.; Janík, D.; Adam, D. Arrangement of terrestrial laser scanner positions for area-wide stem mapping of natural forests. Can. J. For. Res. 2013, 43, 355–363. [Google Scholar] [CrossRef]
- Hopkinson, C.; Lovell, J.; Chasmer, L.; Jupp, D.; Kljun, N.; van Gorsel, E. Integrating terrestrial and airborne lidar to calibrate a 3D canopy model of effective leaf area index. Remote Sens. Environ. 2013, 136, 301–314. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Treitz, P. Investigating laser pulse penetration through a conifer canopy by integrating airborne and terrestrial lidar. Can. J. Remote Sens. 2006, 32, 116–125. [Google Scholar] [CrossRef]
- Seidel, D.; Fleck, S.; Leuschner, C. Analyzing forest canopies with ground-based laser scanning: A comparison with hemispherical photography. Agric. For. Meteorol. 2012, 154–155, 1–8. [Google Scholar] [CrossRef]
- Pimont, F.; Parsons, R.; Rigolot, E.; de Coligny, F.; Dupuy, J.-L.; Dreyfus, P.; Linn, R.R. Modeling fuels and fire effects in 3D: Model description and applications. Environ. Model. Softw. 2016, 80, 225–244. [Google Scholar] [CrossRef]
- Parsons, R.A.; Mell, W.E.; McCauley, P. Linking 3D spatial models of fuels and fire: Effects of spatial heterogeneity on fire behavior. Ecol. Model. 2011, 222, 679–691. [Google Scholar] [CrossRef]
- Linn, R.; Goodrick, S.; Brambilla, S.; Brown, M.; Middleton, R.; O’Brien, J.; Hiers, J. QUIC-fire: A fast-running simulation tool for prescribed fire planning. Environ. Model. Softw. 2019, 125, 104616. [Google Scholar] [CrossRef]
- Cardil, A.; Monedero, S.; Schag, G.; De-Miguel, S.; Tapia, M.; Stoof, C.R.; Silva, C.A.; Mohan, M.; Cardil, A.; Ramirez, J. Fire behavior modeling for operational decision-making. Curr. Opin. Environ. Sci. Health 2021, 23, 100291. [Google Scholar] [CrossRef]
- Kennedy, M.C.; Johnson, M.C.; Harrison, S.C. Model Predictions of Postwildfire Woody Fuel Succession and Fire Behavior Are Sensitive to Fuel Dynamics Parameters. For. Sci. 2020, 67, 30–42. [Google Scholar] [CrossRef]
- Mell, W.; Jenkins, M.A.; Gould, J.; Cheney, P. A physics-based approach to modelling grassland fires. Int. J. Wildland Fire 2007, 16, 1–22. [Google Scholar] [CrossRef]
- Ottmar, R.D.; Hudak, A.T.; Prichard, S.J.; Wright, C.S.; Restaino, J.C.; Kennedy, M.C.; Vihnanek, R.E. Pre-fire and post-fire surface fuel and cover measurements collected in the south-eastern United States for model evaluation and development—RxCADRE 2008, 2011 and 2012. Int. J. Wildland Fire 2016, 25, 10. [Google Scholar] [CrossRef]
- Hiers, J.K.; O’Brien, J.J.; Will, R.E.; Mitchell, R.J. Forest Floor Depth Mediates Understory Vigor in Xeric Pinus palustris Ecosystems. Ecol. Appl. 2007, 17, 806–814. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Trimble, Inc. Trimble Geo7X [Equipment]. 2018. Available online: https://geospatial.trimble (accessed on 19 December 2022).
- Laser Technology, Inc. LaserTech Impulse 200 [Equipment]. 1998. Available online: https://lasertech (accessed on 19 December 2022).
- Hudak, A.T.; Silva, C.A.; Bright, B.C. Trees Tallied at Eglin Air Force Base in 2017; Forest Service Research Data Archive: Fort Collins, CO, USA, 2022. [Google Scholar] [CrossRef]
- Mitchell, R.J.; Kirkman, L.K.; Pecot, S.D.; Wilson, C.A.; Palik, B.J.; Boring, L.R. Patterns and Controls of Ecosystem Function in Longleaf Pine-Wiregrass Savannas. I. Aboveground Net Primary Productivity. Can. J. For. Res. 1999, 29, 743–751. [Google Scholar] [CrossRef]
- Randle, T.; Matthews, R.; Jenkins, T. Technical Specifications for the Biomass Equations Developed for the 2011 Forecast; 2022; Forest Research Internal Publication; Forestry Commission: Edinburgh, Scotland, 2014. Available online: https://cdn.forestresearch.gov.uk/2022/02/revised-biomass-equations-27jan2014.pdf (accessed on 19 December 2022).
- Hudak, A.T.; Bright, B.C.; Satterberg, K.L. RxCADRE 2008, 2011, and 2012: Lidar Data and Derived Raster Products; Forest Service Research Data Archive: Fort Collins, CO, USA, 2015. [Google Scholar] [CrossRef]
- Rowell, E.M.; Seielstad, C.A. RxCADRE 2012: Terrestrial Laser Scan (TLS) Point Cloud Data for Eglin Air Force Base; Forest Service Research Data Archive: Fort Collins, CO, USA. [CrossRef]
- Isenburg, M. LAStools-Efficient LiDAR Processing Software. 2014. Available online: http://rapidlasso.com (accessed on 20 October 2022).
- McGaughey, R. FUSION/LDV LIDAR Analysis and Visualization Software. Available online: http://forsys.cfr.washington.edu/fusion/fusion_overview.html (accessed on 6 January 2023).
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- CloudCompare® (Version 2.12.3) [Software]. 2022. Available online: https://www.danielgm.net/cc/ (accessed on 1 October 2022).
- Roussel, J.R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Meador, A.S.; Bourdon, J.F.; De Boissieu, F.; Achim, A. LidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. Remote Sens. Environ. 2022, 251, 112061. [Google Scholar] [CrossRef]
- Roussel, J.R. LidRplugins: Extra Functions and Algorithms for LidR Package; R package version 0.1.0. 2019. Available online: https://github.com/Jean-Romain/lidRplugins (accessed on 7 September 2022).
- R Core Team. R: A Language and Environment for Statistical Computing. Available online: https://www.r-project.org/ (accessed on 5 September 2022).
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.-M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A Benchmark of Lidar-Based Single Tree Detection Methods Using Heterogeneous Forest Data from the Alpine Space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef]
- Aurenhammer, F.; Klein, R. Voronoi Diagrams. In Handbook of Computational Geometry; Elsevier: Amsterdam, The Netherlands, 2000; Volume 5, pp. 201–290. [Google Scholar]
- Young, D.; Benaglia, T.; Chauveau, D.; Hunter, D.; Elmore, R.; Hettmansperger, T.; Thomas, H.; Xuan, F. Mixtools: Tools for Analyzing Finite Mixture Models. Available online: https://cran.r-project.org/web/packages/mixtools/index.html (accessed on 5 September 2022).
- Klauberg, C.; Hudak, A.T.; Silva, C.A.; Lewis, S.A.; Robichaud, P.R.; Jain, T.B. Characterizing fire effects on conifers at tree level from airborne laser scanning and high-resolution, multispectral satellite data. Ecol. Model. 2019, 412, 108820. [Google Scholar] [CrossRef]
- Evans, J.S.; Cushman, S.A. Gradient modeling of conifer species using random forests. Landsc. Ecol. 2009, 24, 673–683. [Google Scholar] [CrossRef]
- Evans, J.; Erin, J.; Keith, B.; McGinnis, R. Five Years of Short Term Study Abroad Programs: Engineering in a Global and Societal Context. In Proceedings of the 2010 Annual Conference & Exposition, Louisville, KY, USA, 20–23 June 2020. [Google Scholar] [CrossRef]
- Evans, J.S. SpatialEco. Available online: https://github.com/jeffreyevans/spatialEco (accessed on 15 November 2022).
- Silva, C.A.; Klauberg, C.; Hudak, A.T.; Vierling, L.A.; Jaafar, W.S.W.M.; Mohan, M.; Garcia, M.; Ferraz, A.; Cardil, A.; Saatchi, S. Predicting Stem Total and Assortment Volumes in an Industrial Pinus taeda L. Forest Plantation Using Airborne Laser Scanning Data and Random Forest. Forests 2017, 8, 254. [Google Scholar] [CrossRef]
- Massey, F.J., Jr. The Kolmogorov-Smirnov Test for Goodness of Fit. J. Am. Stat. Assoc. 1951, 46, 68–78. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classificatiion and Regression by randomForest. Available online: https://CRAN.R-project.org/package=randomForest (accessed on 14 November 2022).
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Valbuena, R.; Cardil, A.; Mohan, M.; Almeida, D.R.A.; Broadbent, E.N.; Zambrano, A.M.A.; Wilkinson, B.; et al. treetop: A Shiny-based application and R package for extracting forest information from LiDAR data for ecologists and conservationists. Methods Ecol. Evol. 2022, 13, 1164–1176. [Google Scholar] [CrossRef]
- Wu, D.; Johansen, K.; Phinn, S.; Robson, A.; Tu, Y.-H. Inter-comparison of remote sensing platforms for height estimation of mango and avocado tree crowns. Int. J. Appl. Earth Obs. Geoinformation 2020, 89, 102091. [Google Scholar] [CrossRef]
- Saatchi, S.; Halligan, K.; Despain, D.G.; Crabtree, R.L. Estimation of Forest Fuel Load From Radar Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1726–1740. [Google Scholar] [CrossRef]
- Mitsopoulos, I.D.; Dimitrakopoulos, A.P. Canopy fuel characteristics and potential crown fire behavior in Aleppo pine (Pinus halepensis Mill.) forests. Ann. For. Sci. 2007, 64, 287–299. [Google Scholar] [CrossRef]
- Affleck, D.L.; Keyes, C.R.; Goodburn, J.M. Conifer Crown Fuel Modeling: Current Limits and Potential for Improvement. West. J. Appl. For. 2012, 27, 165–169. [Google Scholar] [CrossRef]
- Balaguer-Romano, R.; de Dios, V.R.; Diaz-Sierra, R.; Madrigal, J.; Voltas, J. Needle senescence affects fire behavior in Aleppo pine (Pinus halepensis Mill.) stands: A simulation study. Forests 2020, 11, 1054. [Google Scholar] [CrossRef]
- Nunes, L.; Pasalodos-Tato, M.; Alberdi, I.; Sequeira, A.C.; Vega, J.A.; Silva, V.; Vieira, P.; Rego, F.C. Bulk Density of Shrub Types and Tree Crowns to Use with Forest Inventories in the Iberian Peninsula. Forests 2022, 13, 555. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of LiDAR and imagery for estimating forest canopy fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Skowronski, N.S.; Clark, K.L.; Duveneck, M.; Hom, J. Three-dimensional canopy fuel loading predicted using upward and downward sensing LiDAR systems. Remote Sens. Environ. 2011, 115, 703–714. [Google Scholar] [CrossRef]
- Botequim, B.; Fernandes, P.M.; Borges, J.G.; González-Ferreiro, E.; Guerra-Hernández, J. Improving Silvicultural Practices for Mediterranean Forests through Fire Behaviour Modelling Using LiDAR-Derived Canopy Fuel Characteristics. Int. J. Wildland Fire 2019, 28, 823–839. [Google Scholar] [CrossRef]
- Engelstad, P.S.; Falkowski, M.; Wolter, P.; Poznanovic, A.; Johnson, P. Estimating Canopy Fuel Attributes from Low-Density LiDAR. Fire 2019, 2, 38. [Google Scholar] [CrossRef]
- Arkin, J.; Coops, N.C.; Daniels, L.D.; Plowright, A. Estimation of Vertical Fuel Layers in Tree Crowns Using High Density LiDAR Data. Remote Sens. 2021, 13, 4598. [Google Scholar] [CrossRef]
- Marino, E.; Tomé, J.L.; Hernando, C.; Guijarro, M.; Madrigal, J. Transferability of Airborne LiDAR Data for Canopy Fuel Mapping: Effect of Pulse Density and Model Formulation. Fire 2022, 5, 126. [Google Scholar] [CrossRef]
- Huo, L.; Lindberg, E.; Holmgren, J. Towards low vegetation identification: A new method for tree crown segmentation from LiDAR data based on a symmetrical structure detection algorithm (SSD). Remote Sens. Environ. 2022, 270, 112857. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.; Gessler, P.E.; Hudak, A.T.; Vierling, L.A.; Evans, J.S. The influence of conifer forest canopy cover on the accuracy of two individual tree measurement algorithms using lidar data. Can. J. Remote Sens. 2008, 34, S338–S350. [Google Scholar] [CrossRef]
- Jeronimo, S.M.A.; Kane, V.R.; Churchill, D.J.; McGaughey, R.J.; Franklin, J.F. Applying LiDAR Individual Tree Detection to Management of Structurally Diverse Forest Landscapes. J. For. 2018, 116, 336–346. [Google Scholar] [CrossRef]
- Gilliam, F.S.; Platt, W.J. Effects of long-term fire exclusion on tree species composition and stand structure in an old-growth Pinus palustris (Longleaf pine) forest. Plant Ecol. 1999, 140, 15–26. [Google Scholar] [CrossRef]
- Jacqmain, E.I.; Jones, R.H.; Mitchell, R.J. Influences of Frequent Cool-season Burning Across a Soil Moisture Gradient on Oak Community Structure in Longleaf Pine Ecosystems. Am. Midl. Nat. 1999, 141, 85–100. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating Tree Detection and Segmentation Routines on Very High Resolution UAV LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Tokola, T.; Maltamo, M.; Packalén, P. Effects of pulse density on predicting characteristics of individual trees of Scandinavian commercial species using alpha shape metrics based on airborne laser scanning data. Can. J. Remote Sens. 2008, 34, S441–S459. [Google Scholar] [CrossRef]
- Laurin, G.V.; Ding, J.; Disney, M.; Bartholomeus, H.; Herold, M.; Papale, D.; Valentini, R. Tree Height in Tropical Forest as Measured by Different Ground, Proximal, and Remote Sensing Instruments, and Impacts on above Ground Biomass Estimates. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101899. [Google Scholar]
- Polewski, P.; Yao, W.; Cao, L.; Gao, S. Marker-free coregistration of UAV and backpack LiDAR point clouds in forested areas. ISPRS J. Photogramm. Remote Sens. 2018, 147, 307–318. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Görgens, E.B.; García-Gutiérrez, J.; Rodriguez, L.C.E.; Tomé, M.; González-Ferreiro, E. Comparison of ALS based models for estimating aboveground biomass in three types of Mediterranean forest. Eur. J. Remote Sens. 2016, 49, 185–204. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Bazezew, M.N.; Hussin, Y.A.; Kloosterman, E. Integrating Airborne LiDAR and Terrestrial Laser Scanner forest parameters for accurate above-ground biomass/carbon estimation in Ayer Hitam tropical forest, Malaysia. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 638–652. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating terrestrial and airborne laser scanning for the assessment of single-tree attributes in Mediterranean forest stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef]
- Paris, C.; Kelbe, D.; van Aardt, J.; Bruzzone, L. A Novel Automatic Method for the Fusion of ALS and TLS LiDAR Data for Robust Assessment of Tree Crown Structure. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3679–3693. [Google Scholar] [CrossRef]
- Hudak, A.T.; Kato, A.; Bright, B.C.; Loudermilk, E.L.; Hawley, C.; Restaino, J.C.; Ottmar, R.D.; Prata, G.A.; Cabo, C.; Prichard, S.J.; et al. Towards Spatially Explicit Quantification of Pre- and Postfire Fuels and Fuel Consumption from Traditional and Point Cloud Measurements. For. Sci. 2020, 66, 428–442. [Google Scholar] [CrossRef]
- Olsoy, P.J.; Glenn, N.F.; Clark, P.E.; Derryberry, D.R. Aboveground total and green biomass of dryland shrub derived from terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2014, 88, 166–173. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Shugart, H.H. Improved Biomass Calibration and Validation With Terrestrial LiDAR: Implications for Future LiDAR and SAR Missions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3527–3537. [Google Scholar] [CrossRef]
- Qi, Y.; Coops, N.C.; Daniels, L.D.; Butson, C.R. Comparing tree attributes derived from quantitative structure models based on drone and mobile laser scanning point clouds across varying canopy cover conditions. ISPRS J. Photogramm. Remote Sens. 2022, 192, 49–65. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attributes | Units | Min. | Mean | Max. | sd |
|---|---|---|---|---|---|
| HT | m | 3.90 | 10.65 | 16.90 | 2.96 |
| DBH | cm | 10.0 | 16.40 | 39.50 | 5.05 |
| CBH | m | 0.30 | 4.51 | 8.50 | 2.32 |
| CW | m | 1.30 | 3.26 | 9.45 | 1.36 |
| FB | kg | 1.72 | 7.25 | 41.02 | 5.54 |
| SB | kg | 22.14 | 102.64 | 703.21 | 85.47 |
| CB | kg | 4.77 | 23.09 | 226.92 | 26.54 |
| CBD | kg m−3 | 0.03 | 0.25 | 1.11 | 0.25 |
| Attributes | ALS | TLS |
|---|---|---|
| Point Density | 6.8 points m−2 | 68.14 points m−2 |
| Pulse rate | 178.6 kHz | 10.0 kHz |
| Scan Altitude | 1200 AGL | 16–27 m AGL |
| Definition | Unit | Abbreviation | |
|---|---|---|---|
| Crown Height based metrics | Maximum crown height | m | HMAX |
| Mean crown height | m | HMEAN | |
| Height standard deviation | m | HSD | |
| Variance of heights | m2 | HVAR | |
| Kurtosis of heights | - | HKUR | |
| Skewness of heights | - | HSKEW | |
| Xth percentiles of heights | m | H5TH, H15TH, H20TH, ..., H90TH, H95TH, H99TH | |
| Crown morphology based metrics | Crown base height | m | CBH |
| Crown length (HMAX—CBH) | m | CL | |
| CBH-based crown ratio (100 × CL/CBH) | % | CRAT | |
| Crown radius ( | m | CRAD | |
| Simplified crown projected area (π × CRAD2) | m2 | CPA | |
| Crown convex hull volume | m3 | CV | |
| Crown convex hull surface area | m2 | CSA | |
| Crown density (i.e., the ratio between the number of returns above CBH and the total number of returns) | % | CDEN | |
| HMAX-based crown ratio (100 × CL/HMAX) | % | CRT | |
| Crown form index (100 × CL/(2 × CRAD)) | % | CFI | |
| Crown thickness index (100 × (2 × CRAD)/CL) | % | CTI | |
| Crown spread ratio (100 × (2 × CRAD)/CBH) | % | CSR | |
| Plot | Observed | ALS | TLS | ALS + TLS | |||
|---|---|---|---|---|---|---|---|
| n | RD | n | RD | n | RD | ||
| N | 121 | 124 | 2% | 116 | −4% | 123 | 2% |
| W | 33 | 34 | 3% | 33 | 0% | 33 | 0% |
| S | 51 | 50 | −2% | 52 | 2% | 51 | 0% |
| Data | Forest Attributes | R2 | RMSE (Mean ± sd) | Bias (Mean ± sd) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| (Mean ± sd) | Absolute | Relative (%) | Absolute | Relative (%) | |||||||
| ALS | HT (m) | 0.97 | ±0.01 | 0.53 | ±0.11 | 4.94 | ±1.06 | −0.02 | ±0.09 | −0.15 | ±0.79 |
| DBH (cm) | 0.94 | ±0.05 | 1.46 | ±0.60 | 8.78 | ±3.47 | −0.08 | ±0.24 | −0.48 | ±1.42 | |
| CBH (m) | 0.98 | ±0.01 | 0.37 | ±0.06 | 8.06 | ±1.42 | −0.01 | ±0.06 | −0.14 | ±1.18 | |
| CW (m) | 0.93 | ±0.05 | 0.39 | ±0.17 | 11.6 | ±4.62 | −0.03 | ±0.07 | −0.77 | ±1.89 | |
| FB (kg) | 0.86 | ±0.07 | 2.62 | ±0.82 | 34.19 | ±9.03 | 0.01 | ±0.43 | 0.28 | ±5.56 | |
| SB (kg) | 0.80 | ±0.09 | 51.30 | ±19.13 | 48.32 | ±14.72 | −1.74 | ±8.08 | −1.10 | ±7.49 | |
| CB (kg) | 0.90 | ±0.08 | 11.99 | ±5.80 | 47.42 | ±17.84 | −0.64 | ±2.03 | −1.86 | ±7.63 | |
| CBD (kg m−3) | 0.95 | ±0.03 | 0.03 | ±0.01 | 14.15 | ±4.82 | 0.01 | ±0.01 | −0.73 | ±2.06 | |
| TLS | HT (m) | 0.94 | ±0.02 | 0.79 | ±0.14 | 7.35 | ±1.35 | 0.01 | ±0.13 | 0.01 | ±1.19 |
| DBH (cm) | 0.92 | ±0.04 | 1.67 | ±0.56 | 9.62 | ±2.99 | −0.07 | ±0.28 | −0.35 | ±1.59 | |
| CBH (m) | 0.92 | ±0.02 | 0.69 | ±0.09 | 15.39 | ±2.17 | 0.01 | ±0.11 | 0.16 | ±2.35 | |
| CW (m) | 0.93 | ±0.04 | 0.39 | ±0.15 | 10.81 | ±3.71 | −0.02 | ±0.06 | −0.62 | ±1.74 | |
| FB (kg) | 0.90 | ±0.05 | 2.21 | ±0.90 | 26.87 | ±9.31 | −0.05 | ±0.38 | −0.37 | ±4.50 | |
| SB (kg) | 0.87 | ±0.08 | 43.09 | ±17.03 | 36.82 | ±12.11 | −1.89 | ±6.97 | −1.26 | ±5.79 | |
| CB (kg) | 0.87 | ±0.08 | 12.83 | ±5.35 | 47.04 | ±15.66 | −0.40 | ±2.04 | −0.86 | ±7.28 | |
| CBD (kg m−3) | 0.93 | ±0.03 | 0.03 | ±0.01 | 16.46 | ±3.29 | 0.01 | ±0.01 | 0.38 | ±2.58 | |
| ALS + TLS | HT (m) | 0.97 | ±0.01 | 0.51 | ±0.11 | 4.70 | ±1.06 | −0.01 | ±0.08 | −0.07 | ±0.75 |
| DBH (cm) | 0.97 | ±0.04 | 0.99 | ±0.57 | 5.69 | ±3.17 | −0.08 | ±0.17 | −0.45 | ±0.95 | |
| CBH (m) | 0.96 | ±0.01 | 0.49 | ±0.08 | 10.89 | ±1.80 | −0.01 | ±0.07 | −0.13 | ±1.59 | |
| CW (m) | 0.91 | ±0.05 | 0.43 | ±0.16 | 11.59 | ±4.02 | −0.03 | ±0.06 | −0.8 | ±1.67 | |
| FB (kg) | 0.87 | ±0.07 | 2.26 | ±0.95 | 28.60 | ±10.88 | −0.04 | ±0.36 | −0.38 | ±4.58 | |
| SB (kg) | 0.80 | ±0.11 | 46.65 | ±20.19 | 40.19 | ±15.23 | −2.71 | ±7.05 | −2.01 | ±5.94 | |
| CB (kg) | 0.88 | ±0.11 | 11.25 | ±6.72 | 42.60 | ±21.77 | −0.67 | ±1.92 | −2.04 | ±6.98 | |
| CBD (kg m−3) | 0.96 | ±0.01 | 0.03 | ±0.01 | 12.99 | ±3.03 | 0.01 | 0.01 | −0.02 | ±2.02 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rocha, K.D.; Silva, C.A.; Cosenza, D.N.; Mohan, M.; Klauberg, C.; Schlickmann, M.B.; Xia, J.; Leite, R.V.; Almeida, D.R.A.d.; Atkins, J.W.; et al. Crown-Level Structure and Fuel Load Characterization from Airborne and Terrestrial Laser Scanning in a Longleaf Pine (Pinus palustris Mill.) Forest Ecosystem. Remote Sens. 2023, 15, 1002. https://doi.org/10.3390/rs15041002
Rocha KD, Silva CA, Cosenza DN, Mohan M, Klauberg C, Schlickmann MB, Xia J, Leite RV, Almeida DRAd, Atkins JW, et al. Crown-Level Structure and Fuel Load Characterization from Airborne and Terrestrial Laser Scanning in a Longleaf Pine (Pinus palustris Mill.) Forest Ecosystem. Remote Sensing. 2023; 15(4):1002. https://doi.org/10.3390/rs15041002
Chicago/Turabian StyleRocha, Kleydson Diego, Carlos Alberto Silva, Diogo N. Cosenza, Midhun Mohan, Carine Klauberg, Monique Bohora Schlickmann, Jinyi Xia, Rodrigo V. Leite, Danilo Roberti Alves de Almeida, Jeff W. Atkins, and et al. 2023. "Crown-Level Structure and Fuel Load Characterization from Airborne and Terrestrial Laser Scanning in a Longleaf Pine (Pinus palustris Mill.) Forest Ecosystem" Remote Sensing 15, no. 4: 1002. https://doi.org/10.3390/rs15041002
APA StyleRocha, K. D., Silva, C. A., Cosenza, D. N., Mohan, M., Klauberg, C., Schlickmann, M. B., Xia, J., Leite, R. V., Almeida, D. R. A. d., Atkins, J. W., Cardil, A., Rowell, E., Parsons, R., Sánchez-López, N., Prichard, S. J., & Hudak, A. T. (2023). Crown-Level Structure and Fuel Load Characterization from Airborne and Terrestrial Laser Scanning in a Longleaf Pine (Pinus palustris Mill.) Forest Ecosystem. Remote Sensing, 15(4), 1002. https://doi.org/10.3390/rs15041002