
Exploiting the Sensitivity of Dual-Frequency Smartphones and GNSS Geodetic Receivers for Jammer Localization


Abstract
:1. Introduction
1.1. New Challenges and Related Issues When Using Double-Frequency Smartphones
1.2. Focus and Outline of the Paper
2. Materials and Methods
2.1. GNSS and Jamming Devices Used in the Experiment
2.2. Study Area
3. Setup and Measurement Campaign
3.1. Driving Experiments from DOY 262
3.2. Jamming Experiments from DOY 263
4. Processing Observations and Analyses
4.1. Relative Carrier-Phase Positioning of GNSS Devices
4.2. CNR Inspection and Jammer Position Determination
5. Results and Discussion
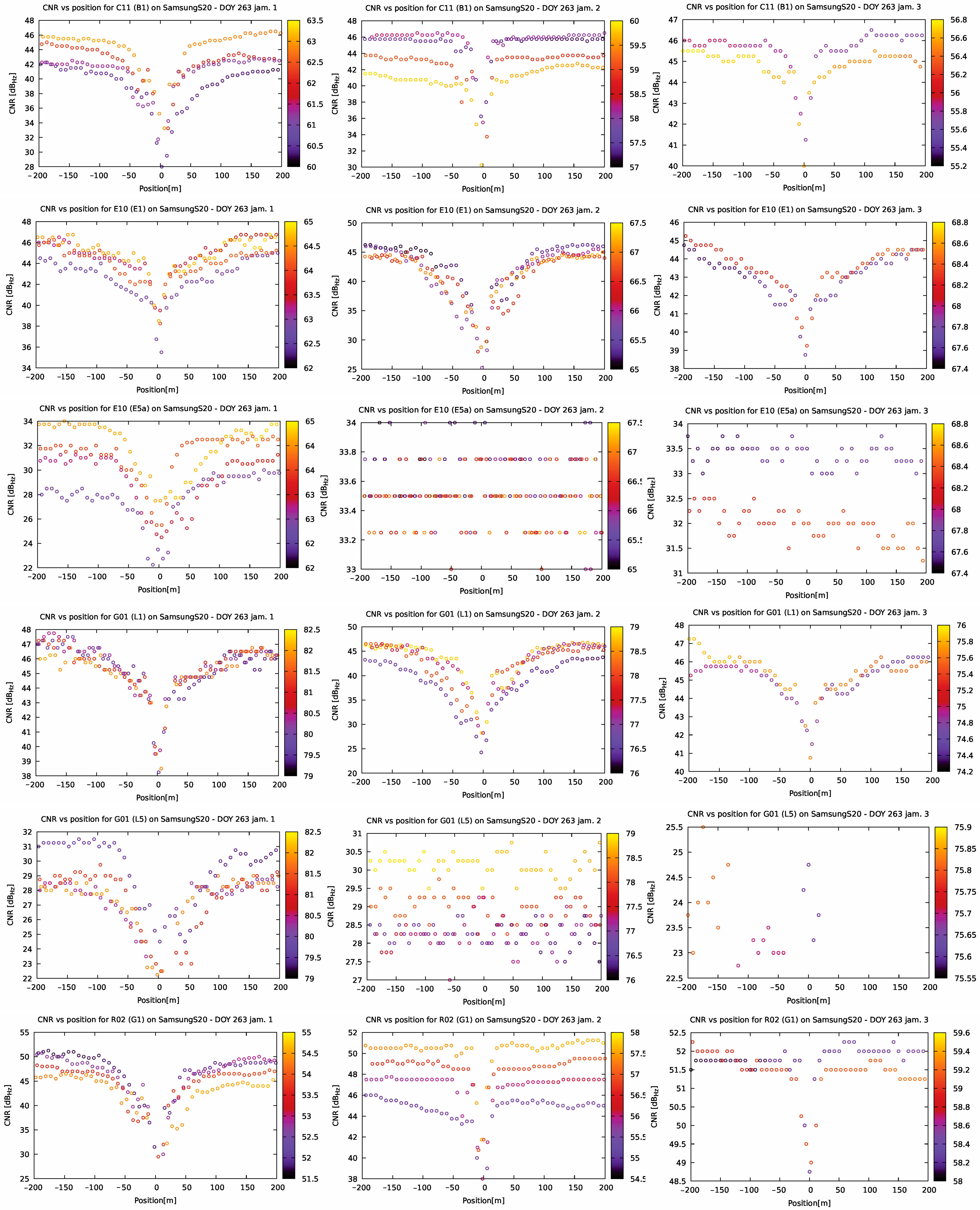
5.1. Effect of Jammer’s Proximity to CNR
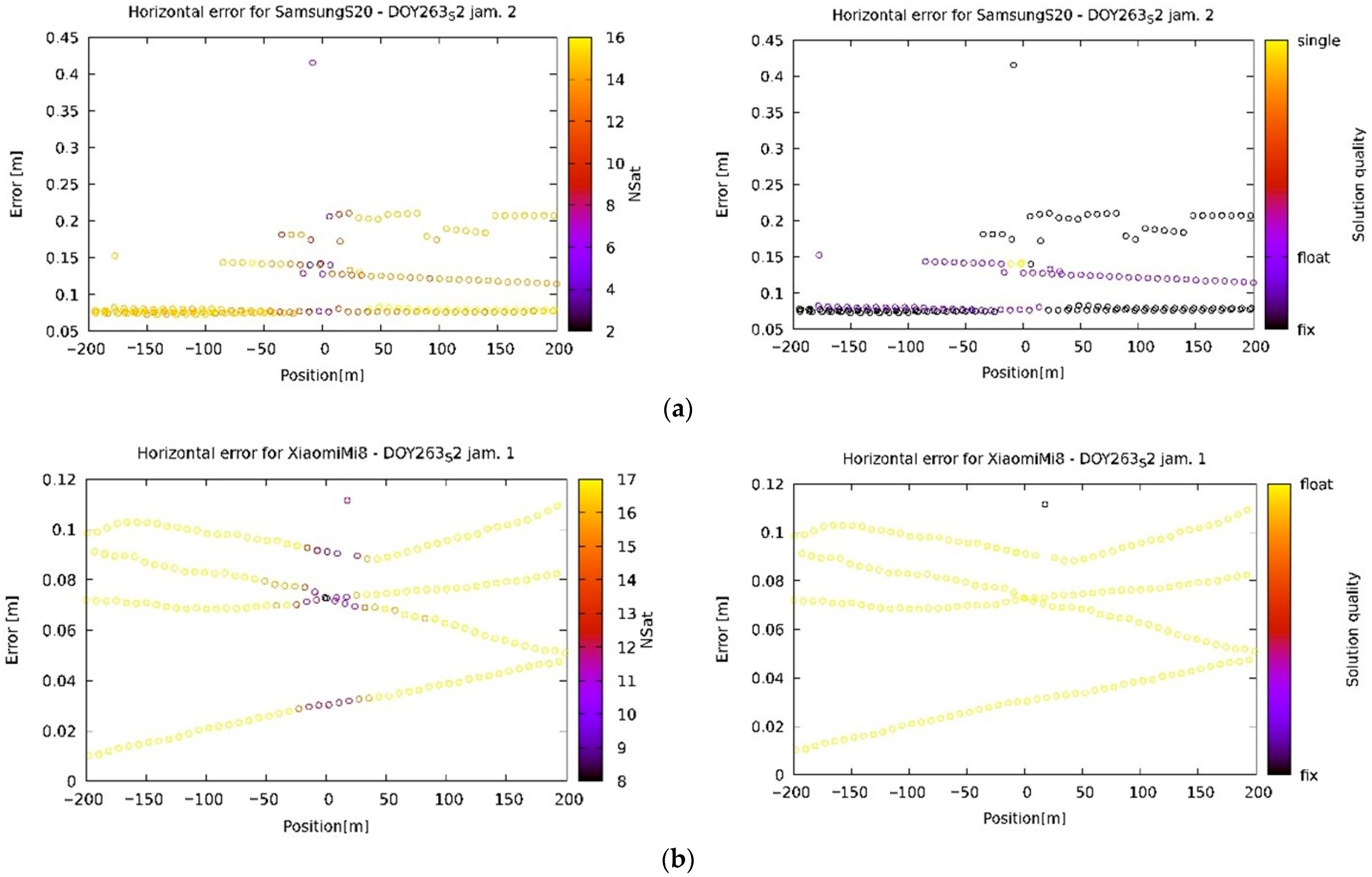
5.2. Effect of Jammer on Precision
5.3. Comparison of Walking and Driving Jamming Experiments
6. Conclusions
- Carrier-phase smartphones continued receiving data even in high interference scenarios when the geodetic receivers failed.
- The quality of positioning under jamming conditions deteriorated a great deal for the smartphones.
- Various jammers have different effect on the signals from different constellations.
- There is a significant discrepancy between the results obtained using RTKLIB and Leica Infinity software when the results are inconsistent with the real position.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Banville, S.; van Diggelen, F. Precise GNSS for Everyone: Precise Positioning Using Raw GPS Measurements from Android Smartphones. GPS World 2016, 27, 43–48. Available online: https://www.gpsworld.com/innovation-precise-positioning-using-raw-gps-measurements-from-android-smartphones/ (accessed on 10 December 2022).
- EU Agency for the Space Programme (EUSPA). White Paper on Using GNSS Raw Measurements on Android Devices; European GNSS Agency: Luxembourg, 2017; ISBN 9789292060336. Available online: https://www.euspa.europa.eu/system/files/reports/gnss_raw_measurement_web_0.pdf (accessed on 6 December 2022).
- Malkos, S. Google to Provide Raw GNSS Measurements: GPS World. Available online: https://www.gpsworld.com/google-to-provide-raw-gnss-measurements/ (accessed on 29 September 2022).
- Bažec, M.; Dimc, F.; Pavlovčič-Prešeren, P. Evaluating the vulnerability of several geodetic GNSS receivers under chirp signal L1/E1 Jamming. Sensors 2020, 20, 814. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pavlovčič-Prešeren, P.; Dimc, F.; Bažec, M. A comparative analysis of the response of GNSS receivers under vertical and horizontal L1/E1 chirp jamming. Sensors 2021, 21, 1446. [Google Scholar] [CrossRef] [PubMed]
- Dimc, F.; Pavlovčič-Prešeren, P.; Bažec, M. Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and Low-Cost GNSS Receivers. Sensors 2021, 21, 5257–5276. [Google Scholar] [CrossRef] [PubMed]
- Miralles, D.; Akos, D.M.; Lee, D.K.; Konovaltsev, A.; Kurz, L.; Lo, S. Robust Satellite Navigation in the Android Operating System using the Android Raw GNSS Measurements Engine and Location Providers. In Proceedings of the 2020 European Navigation Conference (ENC), Dresden, Germany, 23–24 November 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Spens, N.; Lee, D.K.; Nedelkov, F.; Akos, D. Detecting GNSS Jamming and Spoofing on Android Devices. Navig. J. Inst. Navig. 2022, 69. [Google Scholar] [CrossRef]
- Kurum, M.; Gurbuz, A.C.; Nelson, C.; Orsini, L.; Scheider, M. On the Feasibility of Smartphone-Based Interferometric GNSS Reflectometry. In Proceedings of the ION 2019 Pacific PNT Meeting, Honolulu, HI, USA, 8–11 April 2019; pp. 635–640. [Google Scholar] [CrossRef]
- Benvenuto, L.; Dabove, P.; Ferrando, I.; Sguerso, D. Preliminary results on tropospheric ztd estimation by smartphone. Remote Sens. 2021, 13, 4567–4589. [Google Scholar] [CrossRef]
- Xu, L.; Zha, J.; Li, M.; Yuan, Y.; Zhang, B. Estimation of ionospheric total electron content using GNSS observations derived from a smartphone. GPS Solut. 2022, 26, 138. [Google Scholar] [CrossRef]
- Li, G.; Geng, J. Characteristics of raw multi-GNSS measurement error from Google Android smart devices. GPS Solut. 2019, 23, 90. [Google Scholar] [CrossRef]
- Robustelli, U.; Paziewski, J.; Pugliano, G. Observation quality assessment and performance of GNSS standalone positioning with code pseudoranges of dual-frequency Android smartphones. Sensors 2021, 21, 2125. [Google Scholar] [CrossRef]
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results. Meas. J. Int. Meas. Confed. 2021, 175, 109162. [Google Scholar] [CrossRef]
- Zhu, H.; Xia, L.; Wu, D.; Xia, J.; Li, Q. Study on multi-gnss precise point positioning performance with adverse effects of satellite signals on Android smartphone. Sensors 2020, 20, 6447–6467. [Google Scholar] [CrossRef]
- Benvenuto, L.; Cosso, T.; Delzanno, G. An Adaptive Algorithm for Multipath Mitigation in GNSS Positioning with Android Smartphones. Sensors 2022, 22, 5790–5814. [Google Scholar] [CrossRef]
- Oguntuase, J.O.; Wells, D.; Bisnath, S. Vertical Accuracies of Mass-Market GNSS Receivers and Antennas in Ellipsoid Reference Survey Strategy for Marine Applications. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of dual frequency GNSS observations from a Xiaomi Mi 8 Android smartphone and positioning performance analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise GNSS positioning using smart devices. Sensors 2017, 17, 2434–2488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elmezayen, A.; El-Rabbany, A. Precise point positioning using world’s first dual-frequency GPS/galileo smartphone. Sensors 2019, 19, 2593. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, B.; Gao, C.; Lui, Y.; Sun, P. Real-time Precise Point Positioning with a Xiaomi MI8 Android Smartphone. Sensors 2019, 19, 2835–2849. [Google Scholar] [CrossRef] [Green Version]
- Niu, Z.; Nie, P.; Tao, L.; Sun, J.; Zhu, B. RTK with the assistance of an IMU-based pedestrian navigation algorithm for smartphones. Sensors 2019, 19, 3228–3253. [Google Scholar] [CrossRef] [Green Version]
- Paziewski, J. Recent advances and perspectives for positioning and applications with smartphone GNSS observations. Meas. Sci. Technol. 2020, 31, 091001. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S. Smartphone GNSS Performance in an Urban Scenario with RAIM Application. Sensors 2022, 22, 786–798. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Cai, C.; Xu, Z. A Combined Elevation Angle and C/N0 Weighting Method for GNSS PPP on Xiaomi MI8 Smartphones. Sensors 2022, 22, 2804–2888. [Google Scholar] [CrossRef] [PubMed]
- Zeng, S.; Kuang, C.; Yu, W. Evaluation of Real-Time Kinematic Positioning and Deformation Monitoring Using Xiaomi Mi 8 Smartphone. Appl. Sci. 2022, 12, 435–456. [Google Scholar] [CrossRef]
- Deng, C.; Tang, W.; Cui, J.; Shen, M.; Li, Z.; Zou, X.; Zhang, Y. Triple-frequency code-phase combination determination: A comparison with the Hatch-Melbourne-Wübbena combination using BDS signals. Remote Sens. 2018, 10, 353–371. [Google Scholar] [CrossRef] [Green Version]
- Zeng, W.; Wang, L.; Wang, Y.; Zhang, Z.; Zhang, M. Joint Polarized and Spatial Domain Anti-Jamming Method for GNSS. In Proceedings of the 2013 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC 2013), Kunming, China, 5–8 August 2013; Available online: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=6663946 (accessed on 10 December 2022).
- Shinghal, G.; Bisnath, S. Conditioning and PPP processing of smartphone GNSS measurements in realistic environments. Satell. Navig. 2021, 2, 10. [Google Scholar] [CrossRef] [PubMed]
- Miralles, D.; Levigne, N.; Akos, D.M.; Blanch, J.; Lo, S. Android Raw GNSS Measurements as a New Anti-Spoofing and Anti-Jamming Solution. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 334–344. [Google Scholar] [CrossRef] [Green Version]
- BCM4775X GNSS Receiver with Integrated Sensor Hub. 2017. Available online: https://docs.broadcom.com/doc/12379501 (accessed on 30 December 2022).
- BCM4778. Available online: https://www.broadcom.com/products/wireless/gnss-gps-socs/bcm4778 (accessed on 29 September 2022).
- Snapdragon 855 Mobile Platform|Qualcomm. Available online: https://www.qualcomm.com/products/application/smartphones/snapdragon-8-series-mobile-platforms/snapdragon-855-mobile-platform (accessed on 29 September 2022).
- Qualcomm Snapdragon 855 Plus and 860 Mobile Platform|Snapdragon 855+ Processor for Mobile Gaming. Available online: https://www.qualcomm.com/products/application/smartphones/snapdragon-8-series-mobile-platforms/snapdragon-855-plus-and-860-mobile-platform (accessed on 29 September 2022).
- Takasu, T. RTKLIB: An Open Source Program Package for RTK-GPS. Available online: http://rtklib.com/ (accessed on 4 December 2020).
- Everett, T. RTKLIB Demo5_b34d. Available online: https://rtkexplorer.com/downloads/rtklib-code/ (accessed on 5 May 2022).
- Borio, D.; Gioia, C.; Štern, A.; Dimc, F.; Baldini, G. Jammer Localization: From Crowdsourcing to Synthetic Detection. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; Volume 5, pp. 3107–3116. [Google Scholar] [CrossRef]
- Morton, Y.J. Position, Navigation, and Timing Technologies in the 21st Century. In Integrated Satellite Navigation, Sensor Systems, and Civil Applications; Jade Mortin, Y., Ed.; The Institute of Electrical and Electrics Engineering Inc.: Hoboken, NJ, USA, 2021; Volume 1, ISBN 9781119458340. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smartphone | Launch | Android | Chipset |
|---|---|---|---|
| Xiaomi Mi8 | 31 May 2018 | Android 8.1 (Oreo) | BCM44775 |
| Samsung S20 | 11 February 2020 | Android 10 | Snapdragon 865 |
| Huawei P40 | 26 March 2020 | Android 10 | Kirin 990 |
| Xiaomi 11T | 15 September 2021 | Android 11 | Snapdragon 888 |
| Jammer | Flag | Label | Interfered GPS Band | Power Source |
|---|---|---|---|---|
| rušička | 1 | VG5007 | L1 | own secondary |
| accu | 2 | 1AN0943 | L1, L2, L5 | cigarette lighter socket |
| usb | 3 | YB-1610200048311 | L1 | USB connector |
| Site | Session | Receiver | B-Latitude | L-Longitude | H [m] |
|---|---|---|---|---|---|
| A | 1 | Leica GS15 | 45.56389548°N | 13.89417121°E | 434.674 |
| Xiaomi 11T | 45.56389444°N | 13.89417501°E | 435.046 | ||
| B | 1 | Leica GS18 | 45.56375711°N | 13.89405181°E | 434.779 |
| Samsung S20 | 45.56375578°N | 13.89405520°E | 435.008 | ||
| C | 1 | Leica GS15 | 45.56361715°N | 13.89392034°E | 435.025 |
| Xiaomi Mi8 | 45.56361287°N | 13.89392920°E | 435.402 | ||
| D | 1 | Leica GS18 | 45.56344860°N | 13.89375931°E | 435.551 |
| Huawei P40 | 45.56344513°N | 13.89376268°E | 435.610 | ||
| E | 2 | Xiaomi Mi8 | 45.56396017°N | 13.89423794°E | 434.688 |
| F | 2 | Xiaomi 11T | 45.56389605°N | 13.89416995°E | 433.693 |
| G | 2 | Huawei P40 | 45.56375817°N | 13.89405279°E | 435.897 |
| Drive | Direction | Velocity [km/h] | Jammer | Start | End |
|---|---|---|---|---|---|
| 1 | Petrinje | 30 | 1 | 09:15:40 | 09:17:30 |
| 2 | Črnotiče | 30 | 1 | 09:18:00 | 09:20:10 |
| 3 | Petrinje | 30 | 1 | 09:20:20 | 09:22:00 |
| 4 | Črnotiče | 30 | 1 | 09:22:10 | 09:24:10 |
| 5 | Petrinje | 60 | 1 | 09:24:20 | 09:25:30 |
| 6 | Črnotiče | 60 | 1 | 09:26:00 | 09:27:50 |
| 7 | Petrinje | 60 | 1 | 09:28:00 | 09:30:00 |
| 8 | Črnotiče | 60 | 1 | 09:30:10 | 09:32:00 |
| 9 | Petrinje | 30 | 2 | 09:32:10 | 09:34:20 |
| 10 | Črnotiče | 30 | 2 | 09:34:30 | 09:36:20 |
| 11 | Petrinje | 30 | 2 | 09:36:30 | 09:38:00 |
| 12 | Črnotiče | 30 | 2 | 09:38:10 | 09:40:20 |
| 13 | Petrinje | 60 | 2 | 09:40:30 | 09:42:00 |
| 14 | Črnotiče | 60 | 2 | 09:42:10 | 09:44:20 |
| 15 | Petrinje | 60 | 2 | 09:44:30 | 09:45:50 |
| 16 | Črnotiče | 60 | 2 | 09:46:00 | 09:48:10 |
| 17 | Petrinje | 30 | 3 | 09:48:20 | 09:50:10 |
| 18 | Črnotiče | 30 | 3 | 09:50:30 | 09:52:30 |
| 19 | Petrinje | 30 | 3 | 09:52:30 | 09:54:10 |
| Drive | Direction | Velocity [km/h] | Jammer | Start | End |
|---|---|---|---|---|---|
| 1 | Petrinje | 30 | 1 | 10:42:10 | 10:44:30 |
| 2 | Črnotiče | 30 | 1 | 10:44:40 | 10:46:30 |
| 3 | Petrinje | 30 | 1 | 10:46:40 | 10:48:20 |
| 4 | Črnotiče | 30 | 1 | 10:48:30 | 10:50:20 |
| 5 | Petrinje | 30 | 2 | 10:50:30 | 10:54:10 |
| 6 | Črnotiče | 30 | 2 | 10:54:20 | 10:56:10 |
| 7 | Petrinje | 30 | 2 | 10:56:20 | 10:58:20 |
| 8 | Črnotiče | 30 | 3 | 10:58:30 | 11:00:00 |
| 9 | Petrinje | 30 | 1 | 09:52:30 | 09:54:10 |
| Site | Receiver | B-Latitude | L-Longitude | H [m] |
|---|---|---|---|---|
| 1 | Leica GS18 | 45.56395050°N | 13.89422284°E | 434.750 |
| 2 | Samsung S20 | 45.56386619°N | 13.89414673°E | 434.916 |
| 3 | Huawei P40 | 45.56378458°N | 13.89408466°E | 435.804 |
| 4 | Leica GS18 | 45.56371819°N | 13.89401580°E | 435.079 |
| 4 | Xiaomi Mi8 | 45.56371192°N | 13.89400552°E | 433.894 |
| 5 | Xiaomi 11T | 45.56365512°N | 13.89395938°E | 435.249 |
| 6 | Leica GS18 | 45.56351189°N | 13.89382173°E | 435.408 |
| Drive | Direction | Velocity [km/h] | Jammer | Start | End |
|---|---|---|---|---|---|
| 1 | Petrinje | 30 | 1 | 09:39:30 | 09:41:30 |
| 2 | Črnotiče | 30 | 1 | 09:41:40 | 09:43:30 |
| 3 | Petrinje | 30 | 1 | 09:43:40 | 09:45:20 |
| 4 | Črnotiče | 30 | 1 | 09:45:30 | 09:47:00 |
| 5 | Petrinje | 30 | 2 | 09:47:10 | 09:48:20 |
| 6 | Črnotiče | 30 | 2 | 09:48:30 | 09:50:20 |
| 7 | Petrinje | 30 | 2 | 09:50:30 | 09:51:50 |
| 8 | Črnotiče | 30 | 2 | 09:52:00 | 09:53:40 |
| 9 | Petrinje | 30 | 3 | 09:53:50 | 09:55:10 |
| 10 | Črnotiče | 30 | 3 | 09:55:20 | 09:57:20 |
| Drive | Direction | Velocity [km/h] | Jammer | Start | End |
|---|---|---|---|---|---|
| 1 | Črnotiče | 30 | 1 | 10:40:00 | 10:41:40 |
| 2 | Petrinje | 30 | 1 | 10:41:50 | 10:43:30 |
| 3 | Črnotiče | 30 | 1 | 10:43:40 | 10:45:20 |
| 4 | Petrinje | 30 | 2 | 10:45:30 | 10:47:10 |
| 5 | Črnotiče | 30 | 2 | 10:47:20 | 10:48:40 |
| 6 | Petrinje | 30 | 2 | 10:48:50 | 10:50:50 |
| 7 | Črnotiče | 30 | 2 | 10:51:10 | 10:52:40 |
| 8 | Petrinje | 30 | 3 | 10:52:50 | 10:54:30 |
| 9 | Črnotiče | 30 | 3 | 10:54:30 | 10:56:00 |
| 10 | Petrinje | 30 | 3 | 10:56:10 | 10:58:10 |
| Parameters | RTKLIB |
|---|---|
| Constellations | GPS + GLONASS + Galileo + BeiDou |
| Observations | Carrier-phase (L1/E1 + L2/E5b + L5/E5a) |
| Ambiguity | Continuous |
| Ephemeris | Broadcast |
| Elevation angle | 10o |
| DOY | Series | Receiver | Used Satellites |
|---|---|---|---|
| 262 | 1 | Huawei P40 | C06 C09 C11 C16 C27 G01 G03 G04 G17 G19 G21 G22 G31 |
| Xiaomi 11T | E04 E05 E09 E34 E36 G01 G03 G04 G17 G19 G21 G22 G31 G32 | ||
| Xiaomi Mi8 | C09 C11 C27 C33 E04 E05 E09 E34 G01 G03 G08 G17 G19 G21 G22 G33 R07 R24 | ||
| 2 | Huawei P40 | C06 C09 C14 C16 C26 C27 E05 E09 E36 G01 G03 G04 G09 G19 G21 G22 G31 | |
| Xiaomi Mi8 | E05 E09 E34 E36 G01 G03 G04 G19 G21 G22 G31 R01 R03 R08 R23 R24 | ||
| 263 | 2 | Huawei P40 | C05 C06 C09 C11 C16 G01 G03 G04 G08 G17 G21 G22 G31 G32 |
| Samsung S20 | C05 C1C C12 C16 C21 C34 E04 E10 E12 E19 E33 G01 G03 G04 G08 G17 G32 R02 R17 | ||
| Xiaomi 11T | E04 E10 E11 E12 E19 G01 G03 G08 G17 G21 G22 G31 G32 | ||
| Xiaomi Mi8 | C09 C11 C12 C21 C28 C34 E04 E10 E19 E33 G01 G03 G04 G08 G17 G19 G21 G22 R01 R02 R23 R24 | ||
| 3 | Huawei P40 | C09 C14 G01 G03 G04 G06 G09 G17 G19 G21 G22 G31 | |
| Xiaomi 11T | C11 C16 C21 C28 C33 C34 E04 E10 E11 E19 G01 G03 G04 G06 G09 G17 G21 G31 | ||
| Xiaomi Mi8 | C09 C11 C21 C26 C28 C33 E04 E19 E33 G03 G19 G21 G22 G31 | ||
| Huawei P40 | C09 C11 C21 C26 C28 C33 E04 E19 E33 G01 G03 G04 G17 G19 G21 G22 G31 R02 R17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pavlovčič-Prešeren, P.; Dimc, F.; Bažec, M. Exploiting the Sensitivity of Dual-Frequency Smartphones and GNSS Geodetic Receivers for Jammer Localization. Remote Sens. 2023, 15, 1157. https://doi.org/10.3390/rs15041157
Pavlovčič-Prešeren P, Dimc F, Bažec M. Exploiting the Sensitivity of Dual-Frequency Smartphones and GNSS Geodetic Receivers for Jammer Localization. Remote Sensing. 2023; 15(4):1157. https://doi.org/10.3390/rs15041157
Chicago/Turabian StylePavlovčič-Prešeren, Polona, Franc Dimc, and Matej Bažec. 2023. "Exploiting the Sensitivity of Dual-Frequency Smartphones and GNSS Geodetic Receivers for Jammer Localization" Remote Sensing 15, no. 4: 1157. https://doi.org/10.3390/rs15041157
APA StylePavlovčič-Prešeren, P., Dimc, F., & Bažec, M. (2023). Exploiting the Sensitivity of Dual-Frequency Smartphones and GNSS Geodetic Receivers for Jammer Localization. Remote Sensing, 15(4), 1157. https://doi.org/10.3390/rs15041157