
A Novel Deep Learning Method for Automatic Recognition of Coseismic Landslides

 ,
,
Abstract
:1. Introduction
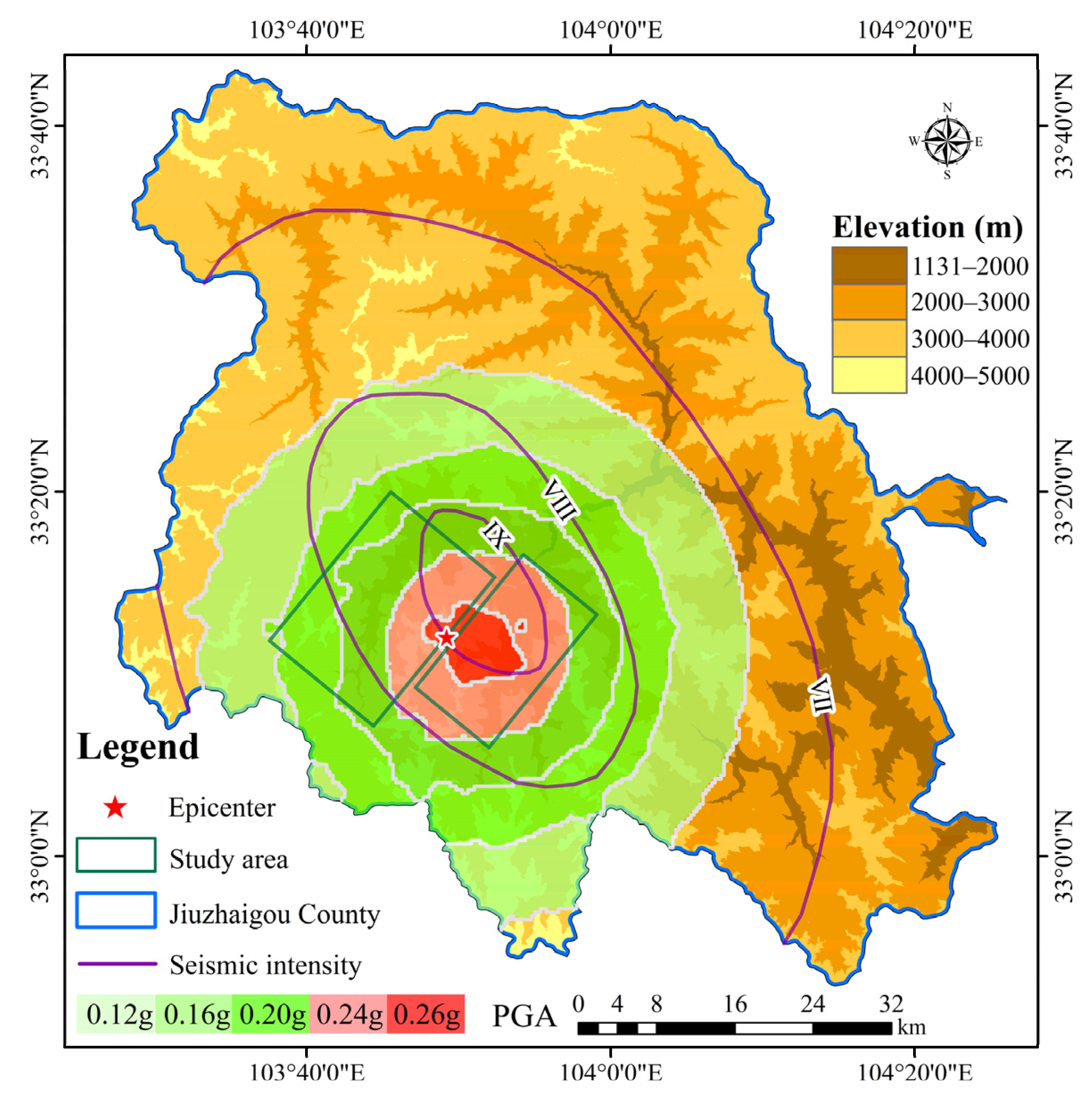
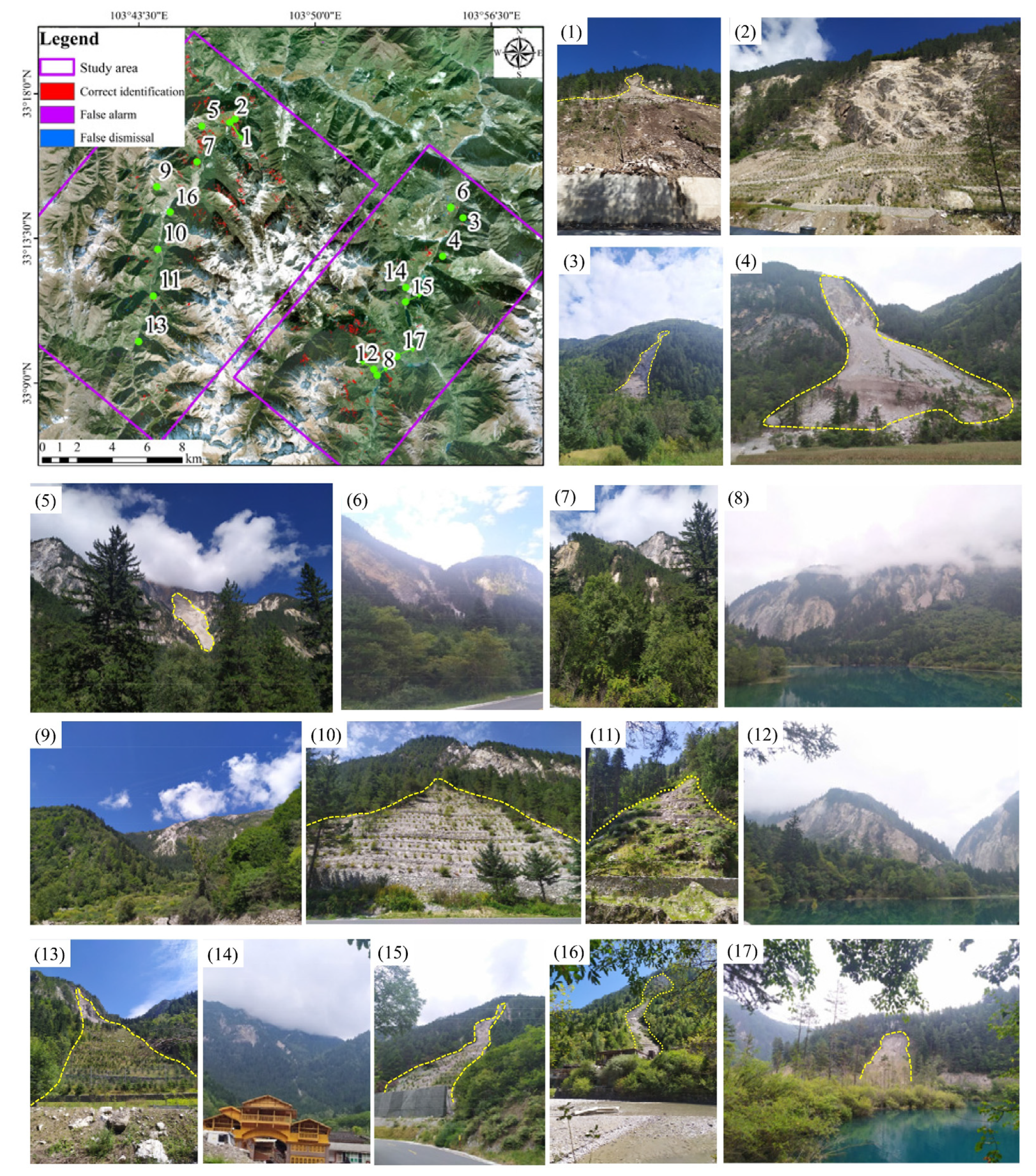
2. Study Area and Multisource Data
3. Methods
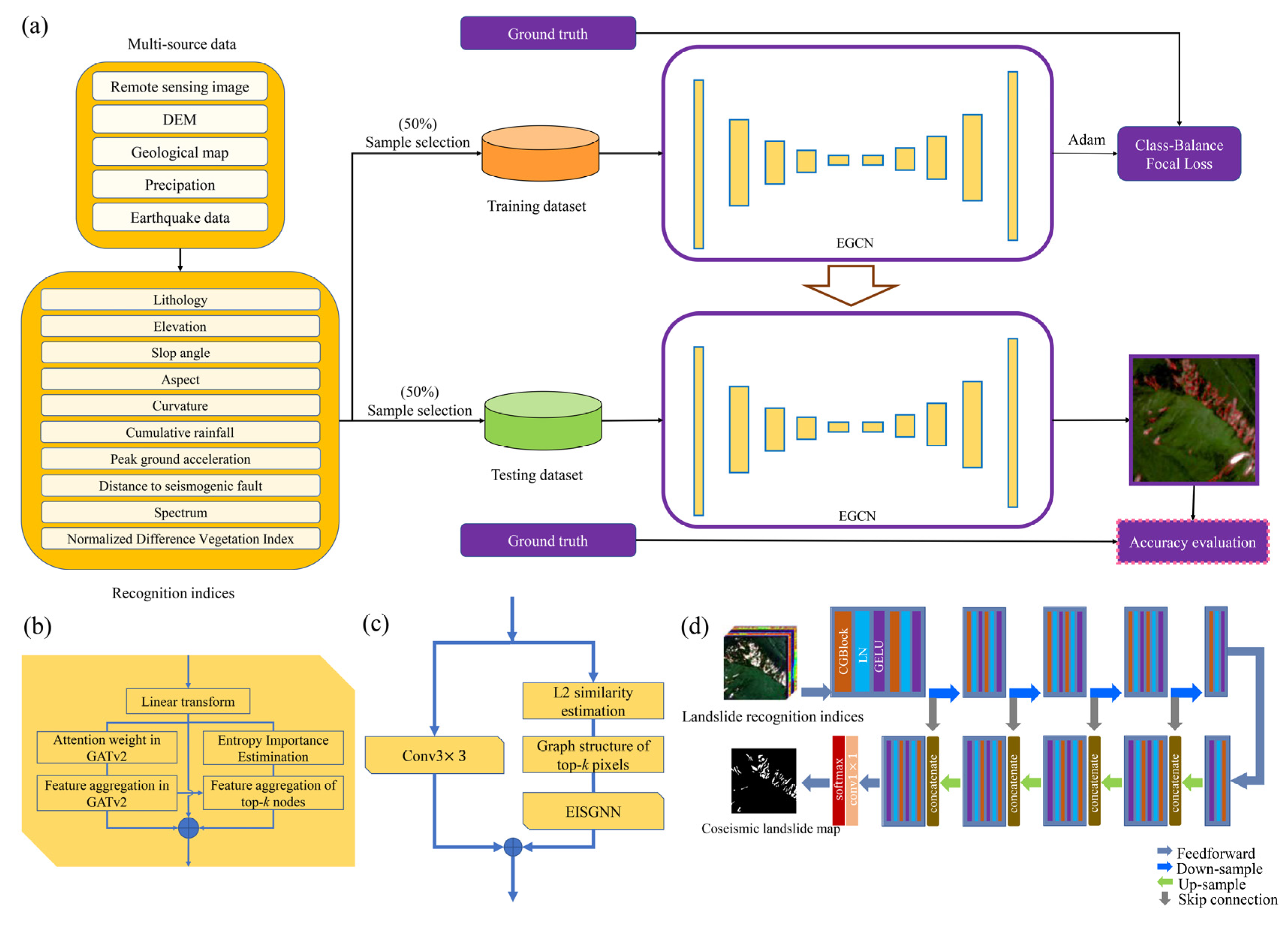
- (1)
- Establishment of recognition indices. The landslide identification indices are established according to the causal mechanism of the coseismic landslides and to the change in surface cover triggered by the coseismic landslides. These indices consist of the geological, topographic, environmental, meteorological, seismic, and spectral characteristics extracted from multi-source data.
- (2)
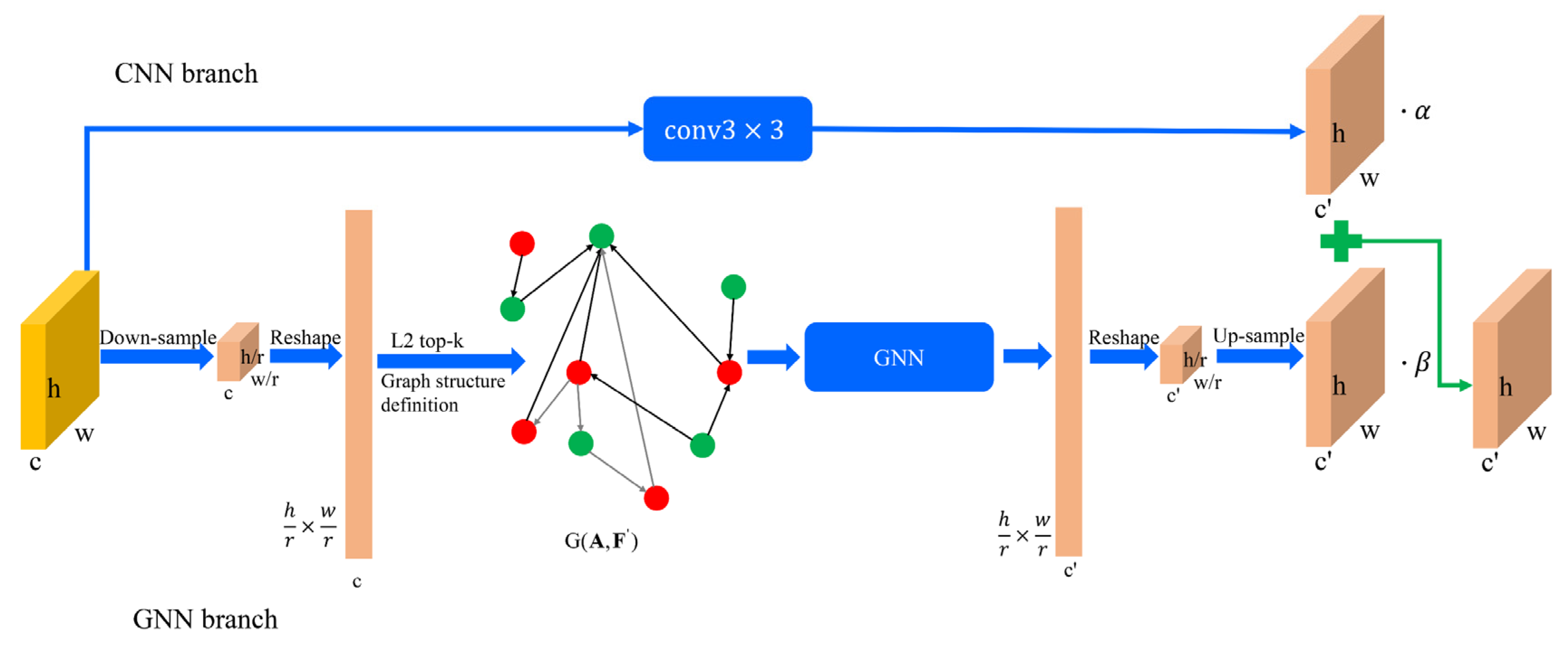
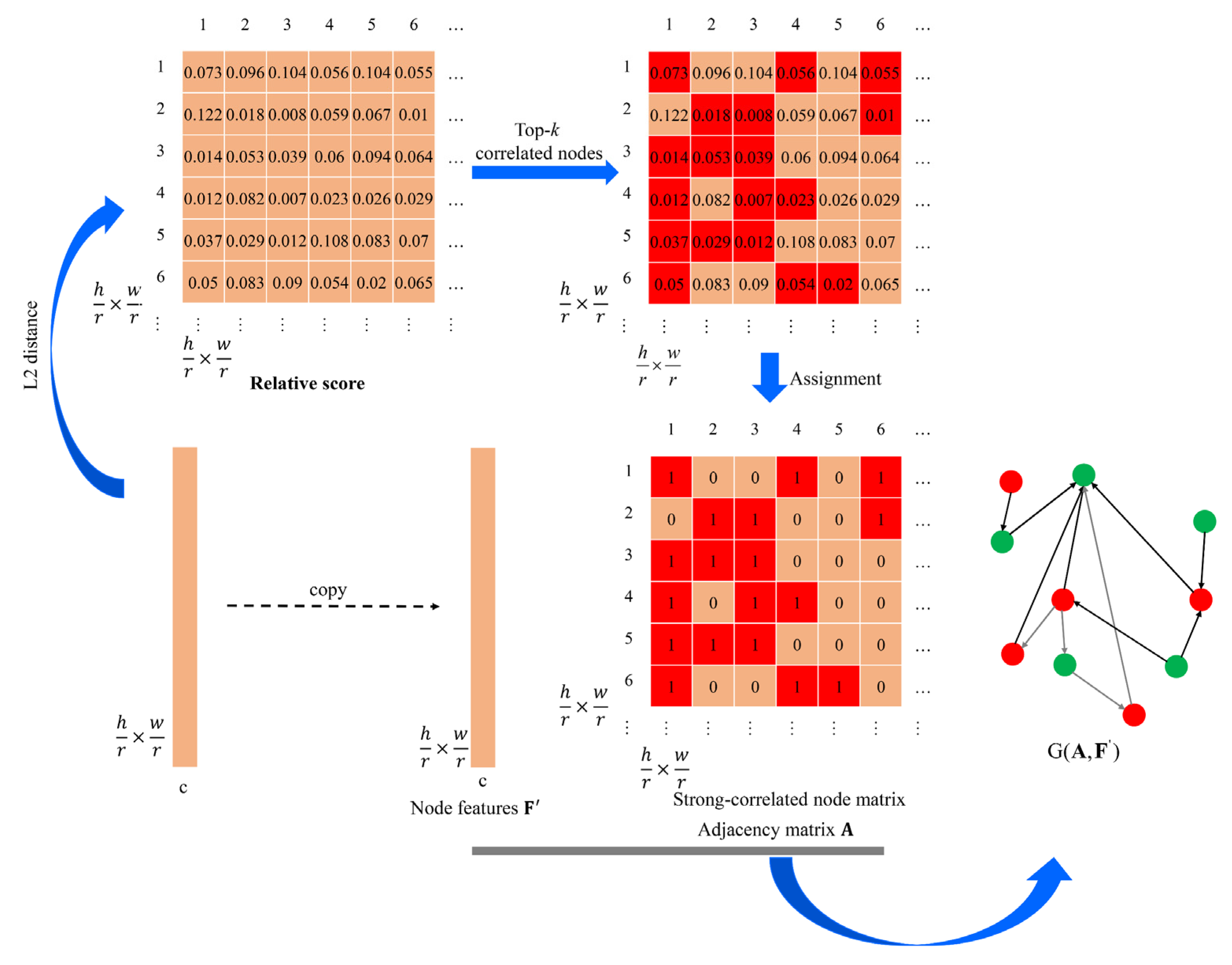
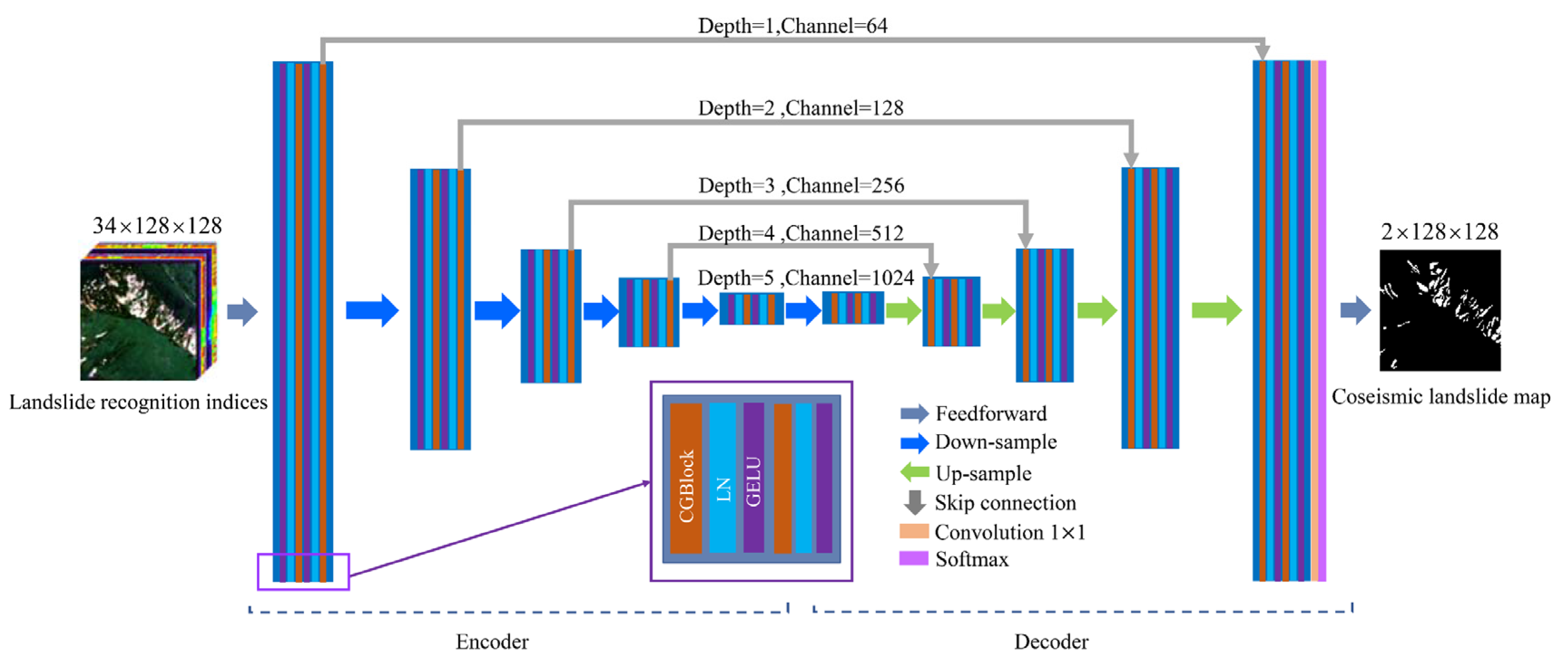
- Construction of the landslide identification network EGCN. It is composed of 3 steps. (a) Design of a graph neural network, EISGNN. A selective aggregation graph neural network, EISGNN, is proposed based on GATv2, entropy importance coefficients, and a selective aggregation strategy of node features. The EISGNN can aggregate effective features and eliminate the influence of invalid context dependency. (b) Construction of a basic block CGBlock. A GNN branch including EISGNN is established to extract the global context dependency relationship. A CNN branch is established to extract the local spatial features. Thus, CGBlock is constructed by integrating the GNN and CNN branches via adaptive weights and an ACmix fusion mechanism. (c) Establishment of the deep network, EGCN. The EGCN employs CGBlock as the basic module and adopts an encoder–decoder structure to effectively integrate the low-level high-resolution features and high-level low-resolution features. Thus, the high-level high-resolution semantic features can be generated, and the high-level context relationship, low-level context dependency, and local spatial features can be effectively fused to improve the identification accuracy.
- (3)
- Automatic recognition of coseismic landslides. The established recognition indices are inputted into the EGCN to obtain the distribution of coseismic landslides. Note that EGCN is the overall network for coseismic landslide recognition. CGBlock is a basic module involved in EGCN and includes two branches of CNN and GNN, and EISGNN is the main part of the GNN branch in CGBlock.
3.1. Establishment of Landslide Recognition Indices
3.2. EISGNN Algorithm
3.2.1. Attention-Based Feature Aggregation in GATv2
3.2.2. Selective Feature Aggregation Based on Entropy-Important Coefficients
3.3. CGBlock
3.4. EGCN
3.5. Loss in Landslide Recognition
4. Results and Discussion
4.1. Algorithm Parameters and Datasets
4.1.1. Algorithm Parameters
4.1.2. Selection of Training and Testing Sets
4.1.3. Evaluation Criteria of Landslide Recognition
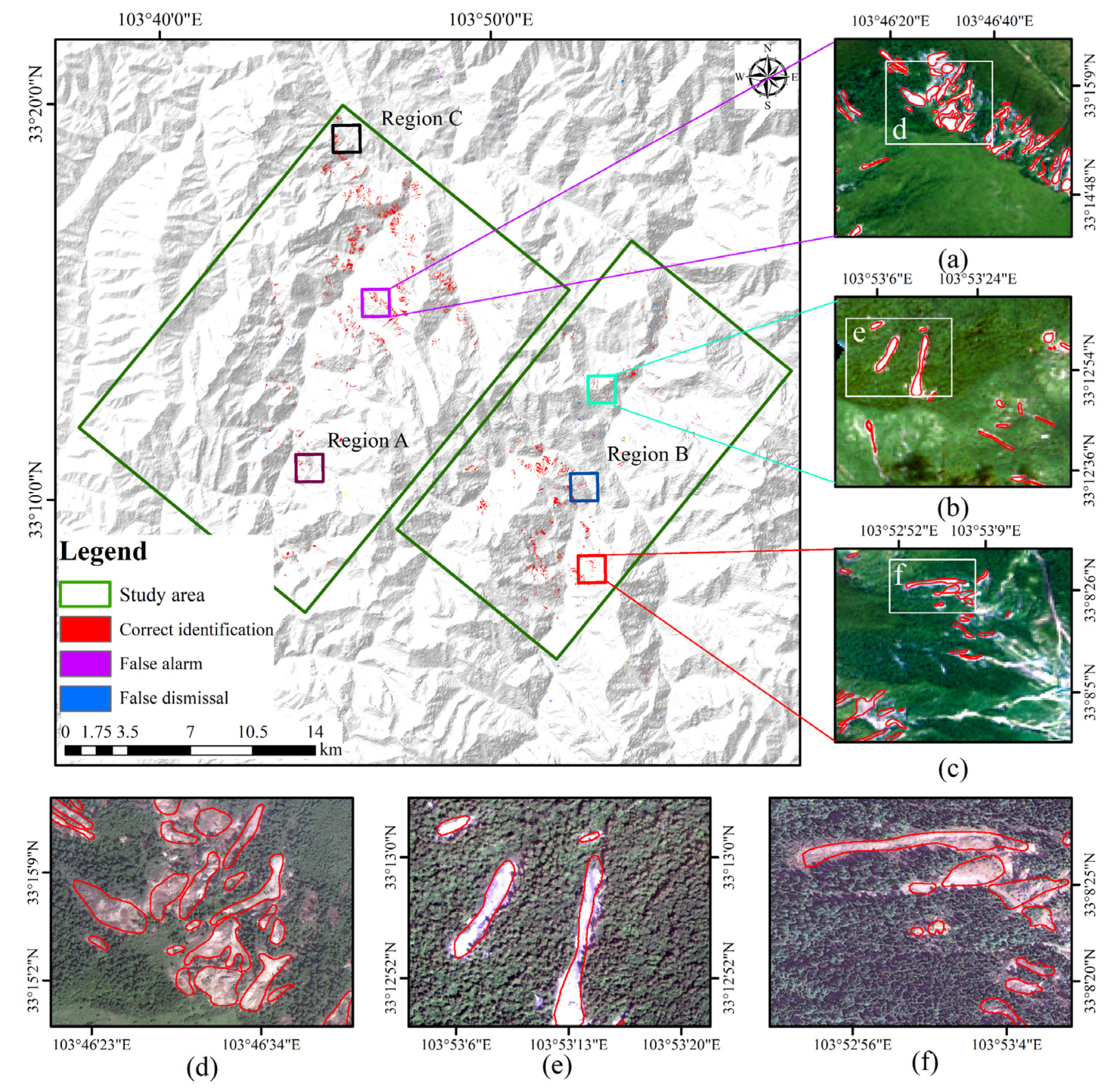
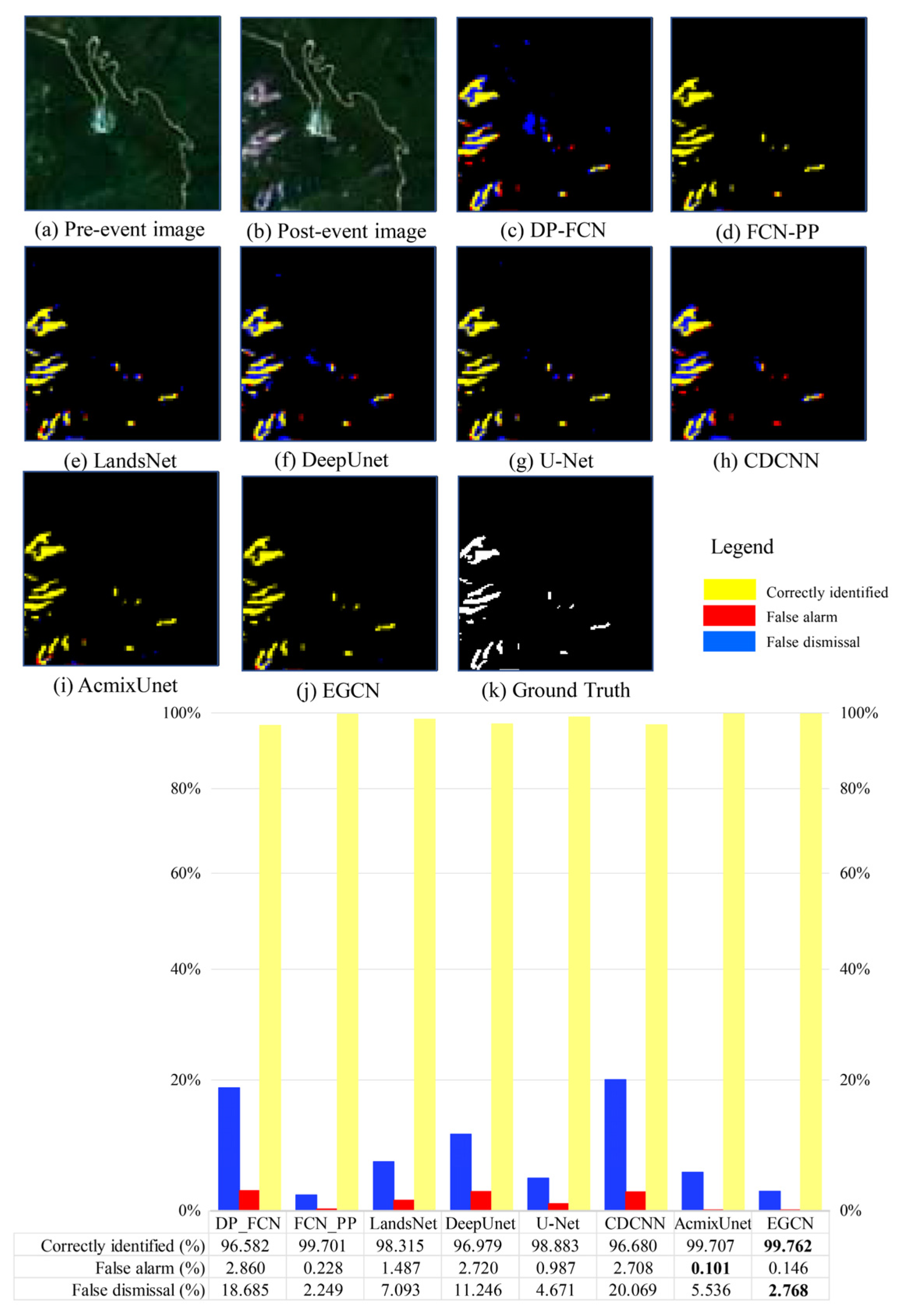
4.2. Recognition Results of Coseismic Landslides
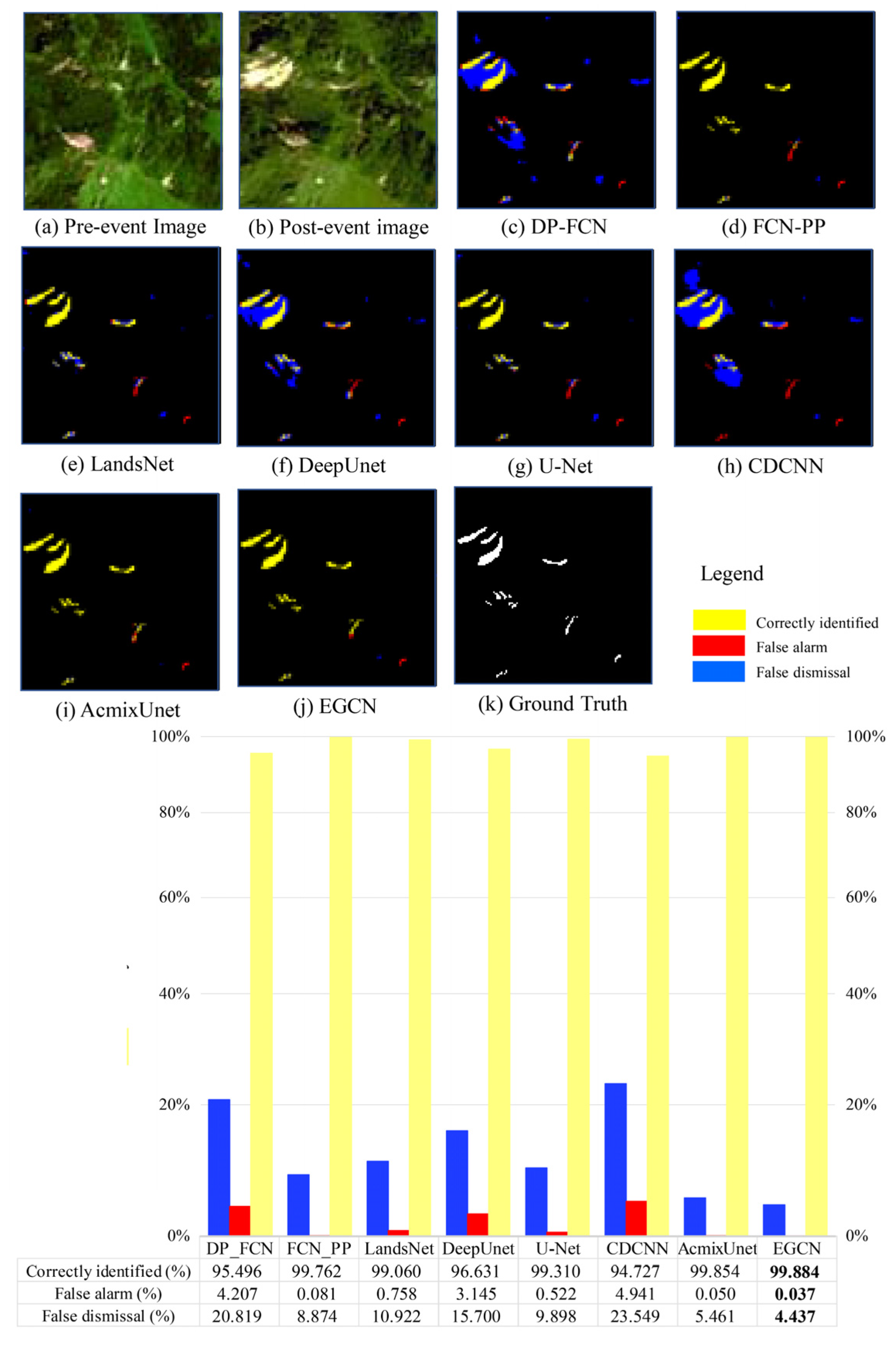
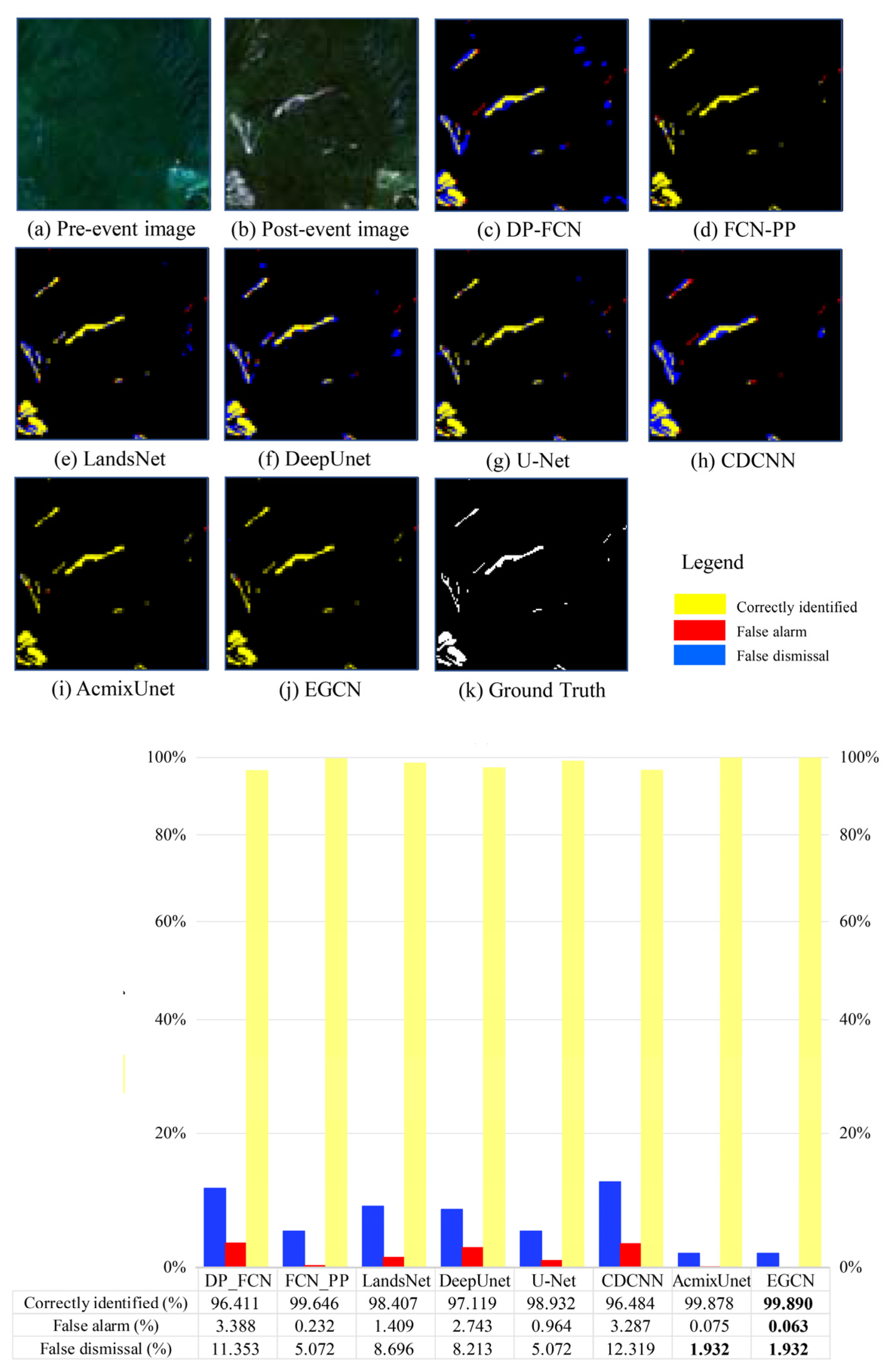
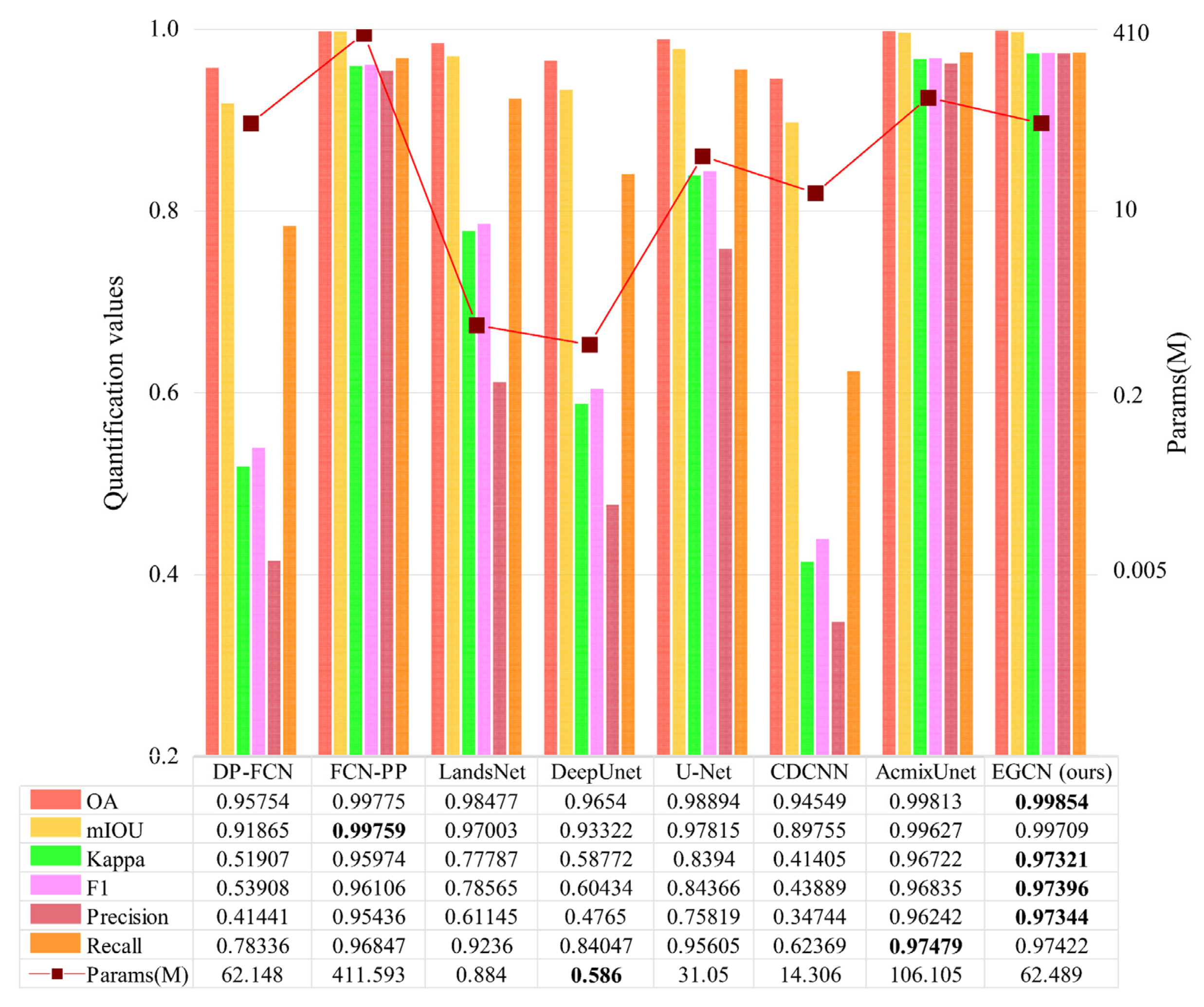
4.3. Precision Comparison of Various Algorithms
4.4. Influence of Recognition Indice Set and Network Hyperparameters
4.4.1. Do Different Recognition Indice Sets Affect the Results of Coseismic Landslide Recognition?
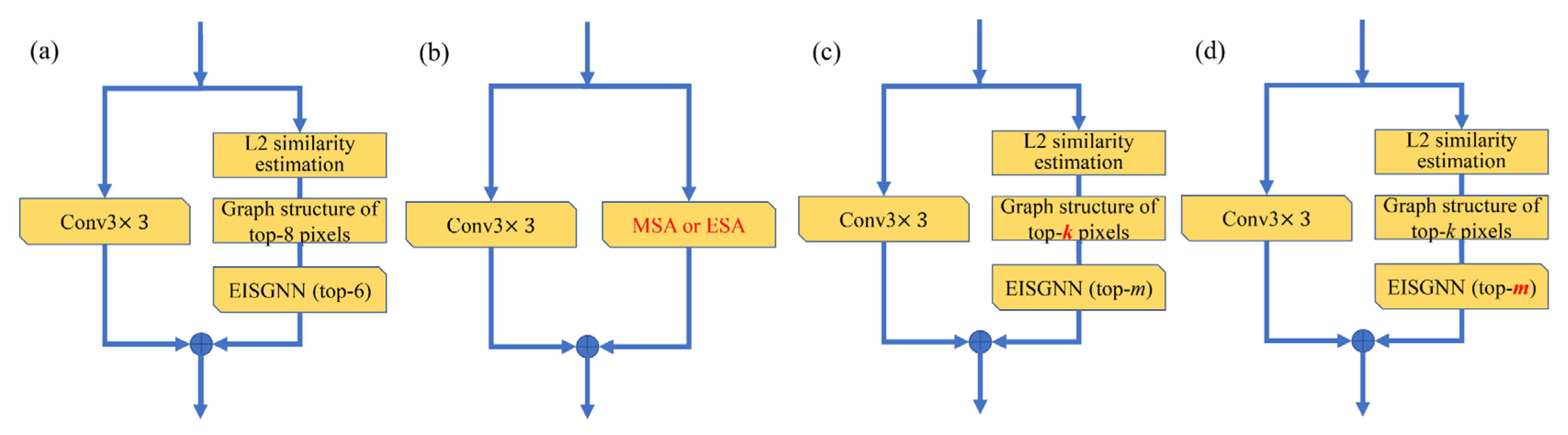
4.4.2. Is the GNN Branch More Efficient than Other Attention Modules of MSA and ESA?
4.4.3. Is EISGNN Adaptable to Graphs of Different Complexity?
4.4.4. Does the Number of Neighbor Nodes in Feature Aggregation Influence the Network Performance?
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lu, P.; Qin, Y.; Li, Z.; Mondini, A.C.; Casagli, N. Landslide mapping from multi-sensor data through improved change detection-based Markov random field. Remote Sens. Environ. 2019, 231, 111235. [Google Scholar] [CrossRef]
- Lv, Z.; Liu, T.; Kong, X.; Shi, C.; Benediktsson, J.A. Landslide Inventory Mapping With Bitemporal Aerial Remote Sensing Images Based on the Dual-Path Fully Convolutional Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4575–4584. [Google Scholar] [CrossRef]
- Zhu, Q.; Chen, L.; Hu, H.; Xu, B.; Zhang, Y.; Li, H. Deep fusion of local and non-local features for precision landslide recognition. arXiv 2020, arXiv:2002.08547. [Google Scholar]
- Prakash, N.; Manconi, A.; Loew, S. A new strategy to map landslides with a generalized convolutional neural network. Sci. Rep. 2021, 11, 9722. [Google Scholar] [CrossRef] [PubMed]
- Bunn, M.D.; Leshchinsky, B.A.; Olsen, M.J.; Booth, A. A Simplified, Object-Based Framework for Efficient Landslide Inventorying Using LIDAR Digital Elevation Model Derivatives. Remote Sens. 2019, 11, 303. [Google Scholar] [CrossRef]
- Hu, Q.; Zhou, Y.; Wang, S.; Wang, F.; Wang, H. Improving the Accuracy of Landslide Detection in “Off-site” Area by Machine Learning Model Portability Comparison: A Case Study of Jiuzhaigou Earthquake, China. Remote Sens. 2019, 11, 2530. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Shahabi, H.; Crivellari, A.; Homayouni, S.; Blaschke, T.; Ghamisi, P. Landslide detection using deep learning and object-based image analysis. Landslides 2022, 19, 929–939. [Google Scholar] [CrossRef]
- Fan, X.; Scaringi, G.; Xu, Q.; Zhan, W.; Dai, L.; Li, Y.; Pei, X.; Yang, Q.; Huang, R. Coseismic landslides triggered by the 8th August 2017 Ms 7.0 Jiuzhaigou earthquake (Sichuan, China): Factors controlling their spatial distribution and implications for the seismogenic blind fault identification. Landslides 2018, 15, 967–983. [Google Scholar] [CrossRef]
- Fan, X.; Scaringi, G.; Korup, O.; West, A.J.; Van Westen, C.J.; Tanyas, H.; Hovius, N.; Hales, T.C.; Jibson, R.W.; Allstadt, K.E.; et al. Earthquake-Induced Chains of Geologic Hazards: Patterns, Mechanisms, and Impacts. Rev. Geophys. 2019, 57, 421–503. [Google Scholar] [CrossRef]
- Gong, M.; Yang, H.; Zhang, P. Feature learning and change feature classification based on deep learning for ternary change detection in SAR images. ISPRS J. Photogramm. Remote Sens. 2017, 129, 212–225. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, M.; Ke, H.; Fang, X.; Zhan, Z.; Chen, S. Landslide Recognition by Deep Convolutional Neural Network and Change Detection. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4654–4672. [Google Scholar] [CrossRef]
- Fang, B.; Chen, G.; Pan, L.; Kou, R.; Wang, L. GAN-Based Siamese Framework for Landslide Inventory Mapping Using Bi-Temporal Optical Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2021, 18, 391–395. [Google Scholar] [CrossRef]
- Nava, L.; Monserrat, O.; Catani, F. Improving Landslide Detection on SAR Data Through Deep Learning. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Cerbelaud, A.; Roupioz, L.; Blanchet, G.; Breil, P.; Briottet, X. A repeatable change detection approach to map extreme storm-related damages caused by intense surface runoff based on optical and SAR remote sensing: Evidence from three case studies in the South of France. ISPRS J. Photogramm. Remote Sens. 2021, 182, 153–175. [Google Scholar] [CrossRef]
- Li, R.; Liu, W.; Yang, L.; Sun, S.; Hu, W.; Zhang, F.; Li, W. DeepUNet: A Deep Fully Convolutional Network for Pixel-Level Sea-Land Segmentation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3954–3962. [Google Scholar] [CrossRef]
- Xu, Q.; Ouyang, C.; Jiang, T.; Fan, X.; Cheng, D. Dfpenet-geology: A deep learning framework for high precision recognition and segmentation of co-seismic landslides. arXiv 2019, arXiv:1908.10907. [Google Scholar]
- Lei, T.; Zhang, Y.; Lv, Z.; Li, S.; Liu, S.; Nandi, A.K. Landslide Inventory Mapping From Bitemporal Images Using Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2019, 16, 982–986. [Google Scholar] [CrossRef]
- Yi, Y.; Zhang, W. A New Deep-Learning-Based Approach for Earthquake-Triggered Landslide Detection From Single-Temporal RapidEye Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6166–6176. [Google Scholar] [CrossRef]
- Liu, P.; Wei, Y.; Wang, Q.; Chen, Y.; Xie, J. Research on Post-Earthquake Landslide Extraction Algorithm Based on Improved U-Net Model. Remote Sens. 2020, 12, 894. [Google Scholar] [CrossRef]
- Li, H.; He, Y.; Xu, Q.; Deng, J.; Li, W.; Wei, Y. Detection and segmentation of loess landslides via satellite images: A two-phase framework. Landslides 2022, 19, 673–686. [Google Scholar] [CrossRef]
- Gao, X.; Chen, T.; Niu, R.; Plaza, A. Recognition and Mapping of Landslide Using a Fully Convolutional DenseNet and Influencing Factors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7881–7894. [Google Scholar] [CrossRef]
- Choi, K.; Lim, W.; Chang, B.; Jeong, J.; Kim, I.; Park, C.-R.; Ko, D.W. An automatic approach for tree species detection and profile estimation of urban street trees using deep learning and Google street view images. ISPRS J. Photogramm. Remote Sens. 2022, 190, 165–180. [Google Scholar] [CrossRef]
- Tang, X.; Tu, Z.; Wang, Y.; Liu, M.; Li, D.; Fan, X. Automatic Detection of Coseismic Landslides Using a New Transformer Method. Remote Sens. 2022, 14, 2884. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, J.; Willette, J.; Hwang, S.J. MPViT: Multi-Path Vision Transformer for Dense Prediction. arXiv 2021, arXiv:2112.11010. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. arXiv 2021, arXiv:2103.14030. [Google Scholar]
- Cao, H.; Wang, Y.; Chen, J.; Jiang, D.; Zhang, X.; Tian, Q.; Wang, M. Swin-Unet: Unet-like pure transformer for medical image segmentation. arXiv 2021, arXiv:2105.05537. [Google Scholar]
- Xie, E.; Wang, W.; Yu, Z.; Anandkumar, A.; Alvarez, J.M.; Luo, P. Segformer: Simple and efficient design for semantic segmentation with transformers. arXiv 2021, arXiv:2105.15203. [Google Scholar]
- Liu, Q.; Kampffmeyer, M.; Jenssen, R.; Salberg, A.-B. Self-constructing graph neural networks to model long-range pixel dependencies for semantic segmentation of remote sensing images. Int. J. Remote Sens. 2021, 42, 6184–6208. [Google Scholar] [CrossRef]
- Zi, W.; Xiong, W.; Chen, H.; Li, J.; Jing, N. SGA-Net: Self-Constructing Graph Attention Neural Network for Semantic Segmentation of Remote Sensing Images. Remote Sens. 2021, 13, 4201. [Google Scholar] [CrossRef]
- Pan, X.; Ge, C.; Lu, R.; Song, S.; Chen, G.; Huang, Z.; Huang, G. On the Integration of Self-Attention and Convolution. arXiv 2021, arXiv:2111.14556. [Google Scholar]
- CENC. Ms 7.0 Earthquake in Jiuzhaigou County, Aba Prefecture, Sichuan. China Earthquake Networks Center, China Earthquake Administration. Available online: http://www.cenc.ac.cn/ (accessed on 8 August 2017).
- SOF. One Foundation 8 • 8 Jiuzhaigou Earthquake Rescue Report. Shenzhen One Foundation. Available online: https://onefoundationcn/infor/detail/839 (accessed on 14 September 2017).
- Tian, Y.; Xu, C.; Ma, S.; Xu, X.; Wang, S.; Zhang, H. Inventory and Spatial Distribution of Landslides Triggered by the 8th August 2017 MW 6.5 Jiuzhaigou Earthquake, China. J. Earth Sci. 2019, 30, 206–217. [Google Scholar] [CrossRef]
- Wang, X.; Mao, H. Spatio-temporal evolution of post-seismic landslides and debris flows: 2017 Ms 7.0 Jiuzhaigou earthquake. Environ. Sci. Pollut. Res. 2021, 29, 15681–15702. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Hu, K.; Tang, J.; You, Y.; Wu, C. Assessment of debris-flow potential dangers in the Jiuzhaigou Valley following the August 8, 2017, Jiuzhaigou earthquake, western China. Eng. Geol. 2019, 256, 57–66. [Google Scholar] [CrossRef]
- Li, Y.; Huang, C.; Yi, S.; Wu, C. Study on seismic fault and source rupture tectonic dynamic mechanism of jiuzhaigou Ms 7.0 earthquake. J. Eng. Geol. 2017, 25, 1141–1150. [Google Scholar] [CrossRef]
- Festa, D.; Bonano, M.; Casagli, N.; Confuorto, P.; De Luca, C.; Del Soldato, M.; Lanari, R.; Lu, P.; Manunta, M.; Manzo, M.; et al. Nation-wide mapping and classification of ground deformation phenomena through the spatial clustering of P-SBAS InSAR measurements: Italy case study. ISPRS J. Photogramm. Remote Sens. 2022, 189, 1–22. [Google Scholar] [CrossRef]
- Brody, S.; Alon, U.; Yahav, E. How attentive are graph attention networks? arXiv 2021, arXiv:2105.14491. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal loss for dense object detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef]
- Cui, Y.; Jia, M.; Lin, T.; Song, Y.; Belongie, S. Class-Balanced Loss Based on Effective Number of Samples. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–19 June 2019; pp. 9260–9269. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.-C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Data | Date | Resolution | Resource |
|---|---|---|---|---|
| Image | Sentinel-2 Level 1C image | 29 July 2017 and 13 August 2017 | 10 m | Copernicus programme of the European Space Agency |
| Terrain | ALOS DEM | 13 February 2011 | 12.5 m | Alaska Satellite Facility |
| Geology | Geological map | Pre-earthquake | 1:200,000 1:50,000 | China Geological Survey |
| Meteorology | Precipitation station report | 29 July 2017–8 August 2017 | —— | National Center for Environmental Information |
| Earthquake | Peak Ground Acceleration (PGA) | 8 August 2017 | —— | United States Geological Survey |
| Seismogenic fault | 8 August 2017 | —— | [36] |
| Time | Indice Type | Indice | Level | Data Source |
|---|---|---|---|---|
| Pre-earthquake | Geological | Stratum | (1) D1; (2) D2; (3) C2; (4) P1; (5) P2-T1; (6) T1; (7) T2; (8)T3 | Geological map |
| Topographic | Elevation (m) | Continuous | Digital Elevation Model (DEM) | |
| Slop angle (°) | Continuous | |||
| Slop aspect | (1) Flat; (2) N; (3) NE; (4) E; (5) SE; (6) S; (7) SW; (8) W;(9) NW | |||
| Curvature | Continuous | |||
| Meteorological | Cumulative rainfall (mm) | Continuous | Precipitation station report | |
| Earthquake | Seismic | Peak ground acceleration (PGA, g) | (1) 0.12; (2) 0.16; (3) 0.2; (4) 0.24; (5) 0.26 | Peak ground acceleration |
| Distance to seismogenic fault (km) | (1) <1; (2) 1~2; (3) 2~3; (4) 3~4; (5) 4~5; (6) 5~6; (7) ≥6 | Seismogenic fault | ||
| Pre-earthquake and post-earthquake | Spectral | Reflectance | Continuous | Sentinel-2 images |
| Environmental | Normalized Difference Vegetation Index (NDVI) | Continuous |
| Parameter | k | select_factor | α, β, λ, μ | Optimizer | Initial Learning Rate | Weight Decay | Batch Size | Epoch |
|---|---|---|---|---|---|---|---|---|
| Value | 8 | 0.8 | 1.0 | Adam | 0.0001 | 0.0007 | 4 | 70 |
| Criterion | Formula | Description |
|---|---|---|
| OA (Overall Accuracy) | Represents the ratio of correctly predicted pixels among all pixels | |
| mIOU (mean Intersection Over Union) | Represents the degree of overlap between the predicted semantic segmentation map and the groundtruth | |
| P (Precision) | Represents the ratio of correctly predicted pixels in the predicted positive samples | |
| R (Recall) | Indicates the ratio of correctly predicted pixels in the positive samples of groundtruth | |
| F1 | Indicates the harmonic mean of the Precision and the Recall | |
| Kappa | Indicates the consistency among the predicted results and the label | |
| Params | Indicates the model parameter size |
| Region | Environment | Minimum Landslide Area (m2) | Minimum Landslide Size (Pixels) | Maximum Landslide Area (m2) | Maximum Landslide Size (Pixels) |
|---|---|---|---|---|---|
| A | Woodland, bare land | 1100 | 11 | 10,200 | 102 |
| B | Grassland, river | 800 | 8 | 10,900 | 109 |
| C | Grassland, road | 1000 | 10 | 9600 | 96 |
| Ablation Type | OA | mIoU | Kappa | F1 | Precision | Recall |
|---|---|---|---|---|---|---|
| (a) | 0.99551 | 0.99107 | 0.92492 | 0.92723 | 0.89666 | 0.96170 |
| (b) | 0.99378 | 0.98766 | 0.90061 | 0.90382 | 0.86243 | 0.95138 |
| (c) | 0.99617 | 0.99239 | 0.93478 | 0.93675 | 0.91572 | 0.96020 |
| (d) | 0.99854 | 0.99709 | 0.97321 | 0.97396 | 0.97344 | 0.97422 |
| Ablation Type | Context-Dependent Modeling Approach | select_factor | OA | mIoU | Kappa | F1 | Precision | Recall | |
|---|---|---|---|---|---|---|---|---|---|
| (b) | Patch MSA | — | — | 0.9983 | 0.99661 | 0.96875 | 0.96962 | 0.96493 | 0.97517 |
| ESA | — | — | 0.99829 | 0.9966 | 0.96932 | 0.97019 | 0.96708 | 0.97403 | |
| GNN branch | — | — | 0.99854 | 0.99709 | 0.97321 | 0.97396 | 0.97344 | 0.97422 | |
| (c) | GNN branch | 8 | — | 0.99854 | 0.99709 | 0.97321 | 0.97396 | 0.97344 | 0.97422 |
| GNN branch | 16 | — | 0.99853 | 0.99707 | 0.97322 | 0.97397 | 0.97271 | 0.97589 | |
| GNN branch | 32 | — | 0.99862 | 0.99725 | 0.97476 | 0.97547 | 0.97746 | 0.97375 | |
| (d) | GNN branch | 32 | 0.2 | 0.99841 | 0.99683 | 0.97138 | 0.9715 | 0.97464 | 0.96914 |
| GNN branch | 32 | 0.4 | 0.99858 | 0.99716 | 0.97352 | 0.97425 | 0.97458 | 0.97423 | |
| GNN branch | 32 | 0.6 | 0.99854 | 0.99709 | 0.97344 | 0.97418 | 0.97383 | 0.97494 | |
| GNN branch | 32 | 0.8 | 0.99862 | 0.99725 | 0.97476 | 0.97547 | 0.97746 | 0.97375 | |
| GNN branch | 32 | 1.0 | 0.99827 | 0.99654 | 0.96889 | 0.96978 | 0.96751 | 0.97243 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Wang, X.; Zhang, X.; Zheng, J.; Ke, Y.; Wang, L.; Guo, H. A Novel Deep Learning Method for Automatic Recognition of Coseismic Landslides. Remote Sens. 2023, 15, 977. https://doi.org/10.3390/rs15040977
Yang Q, Wang X, Zhang X, Zheng J, Ke Y, Wang L, Guo H. A Novel Deep Learning Method for Automatic Recognition of Coseismic Landslides. Remote Sensing. 2023; 15(4):977. https://doi.org/10.3390/rs15040977
Chicago/Turabian StyleYang, Qiyuan, Xianmin Wang, Xinlong Zhang, Jianping Zheng, Yu Ke, Lizhe Wang, and Haixiang Guo. 2023. "A Novel Deep Learning Method for Automatic Recognition of Coseismic Landslides" Remote Sensing 15, no. 4: 977. https://doi.org/10.3390/rs15040977
APA StyleYang, Q., Wang, X., Zhang, X., Zheng, J., Ke, Y., Wang, L., & Guo, H. (2023). A Novel Deep Learning Method for Automatic Recognition of Coseismic Landslides. Remote Sensing, 15(4), 977. https://doi.org/10.3390/rs15040977