


Clock Ensemble Algorithm Test in the Establishment of Space-Based Time Reference
Abstract
:1. Introduction
2. Clock Ensemble Algorithm
2.1. Infrastructure and System Architecture of Space-Based Time Reference
2.2. Natural Kalman Clock Ensemble Algorithm
2.3. Reduced Kalman Clock Ensemble Algorithm
2.4. Two-Stage Kalman Clock Ensemble Algorithm
3. Experimental Analysis
3.1. Observed Data
3.2. Accuracy Evaluation of Observation Data
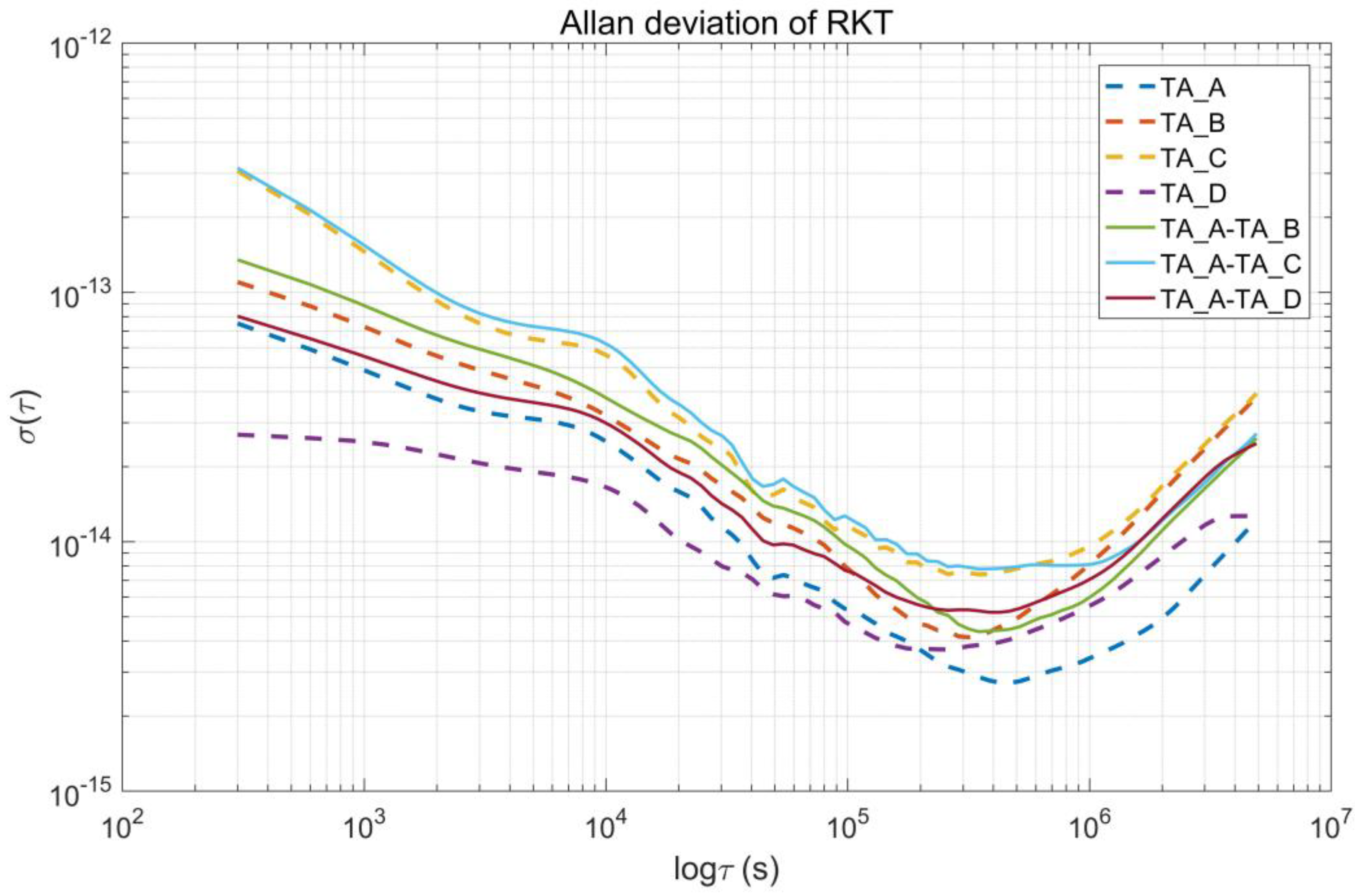
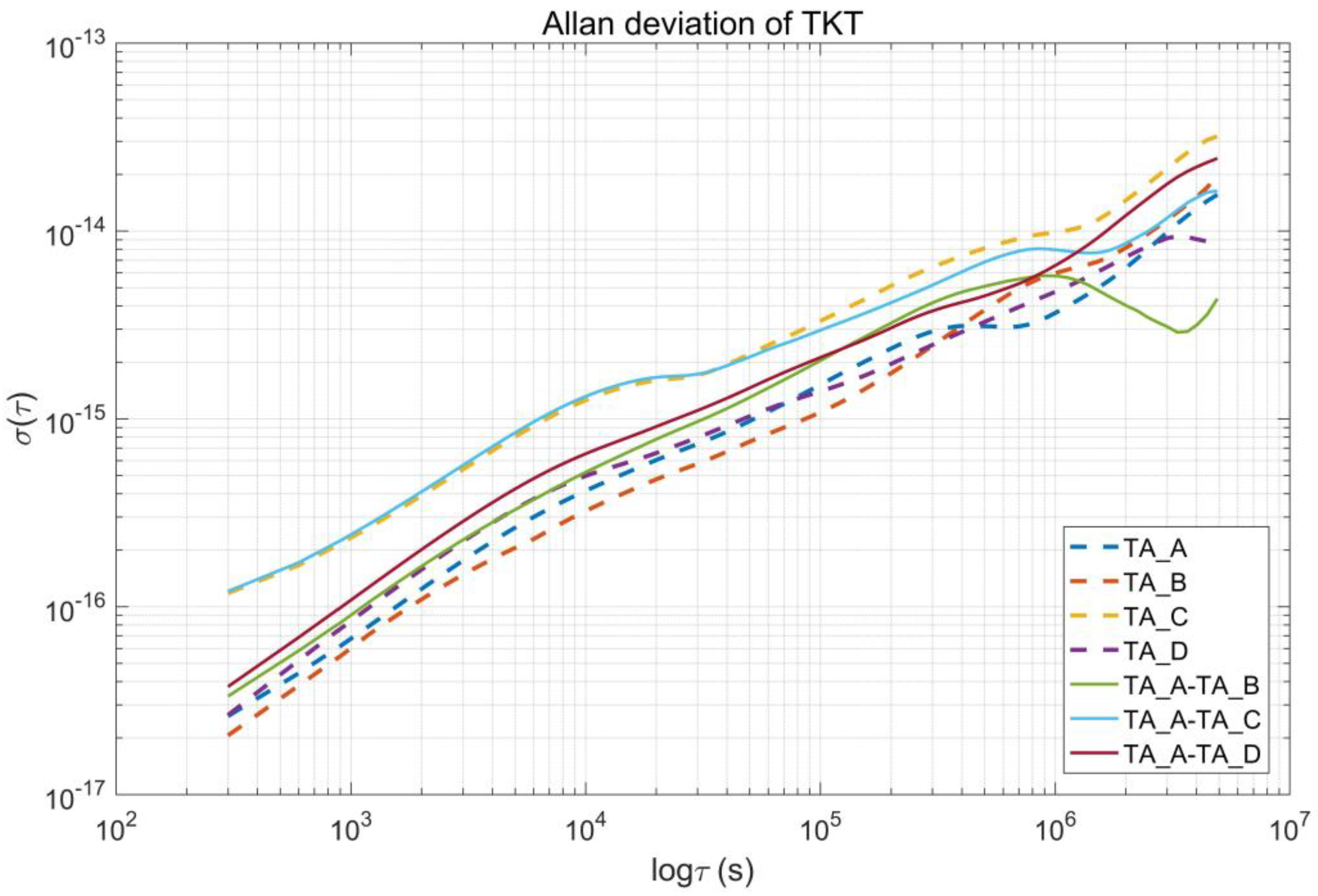
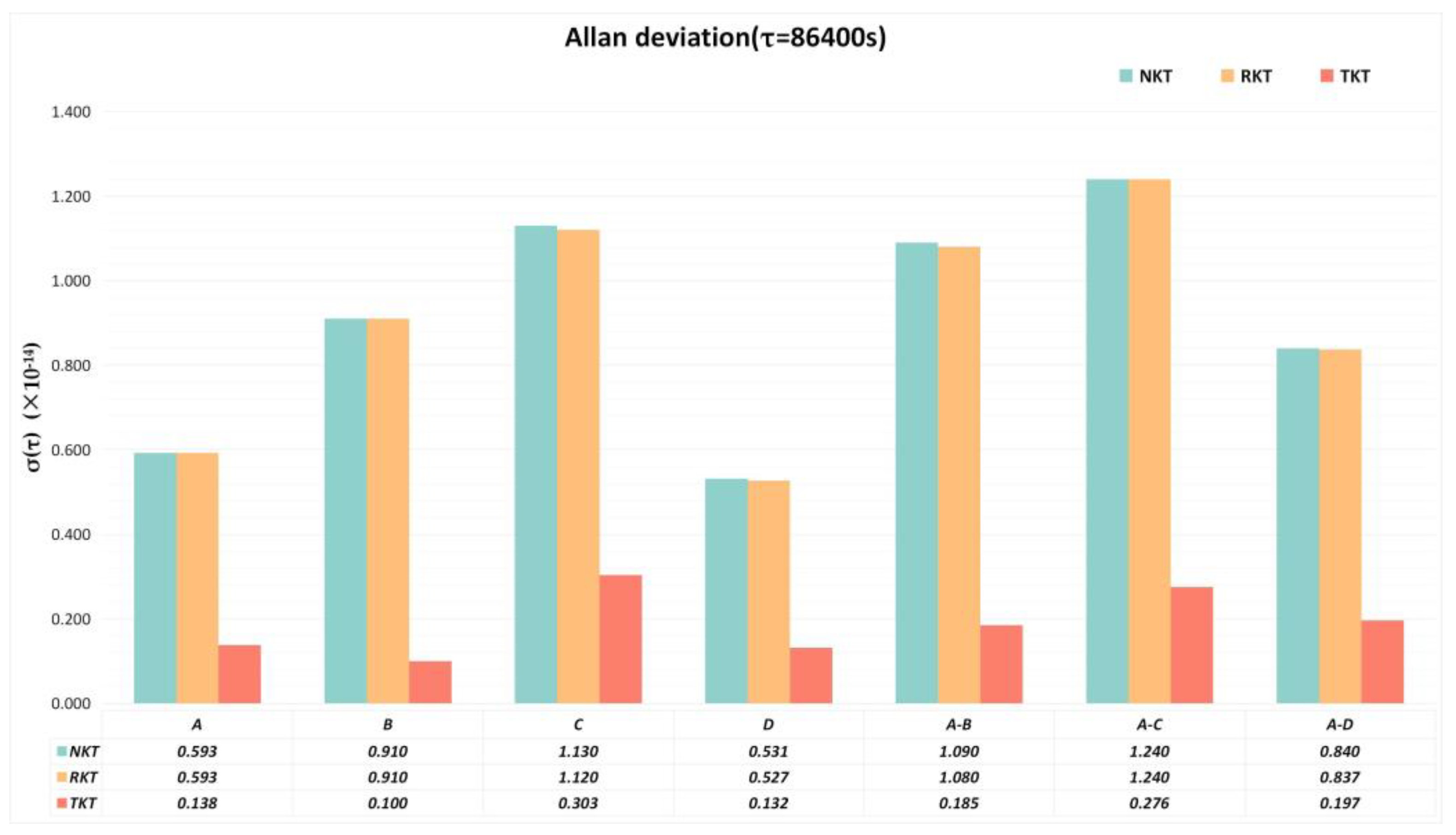
3.3. Frequency Stability of the Timescales Generated by the Three Algorithms
4. Satellite Clock Bias Prediction
4.1. Prediction Models
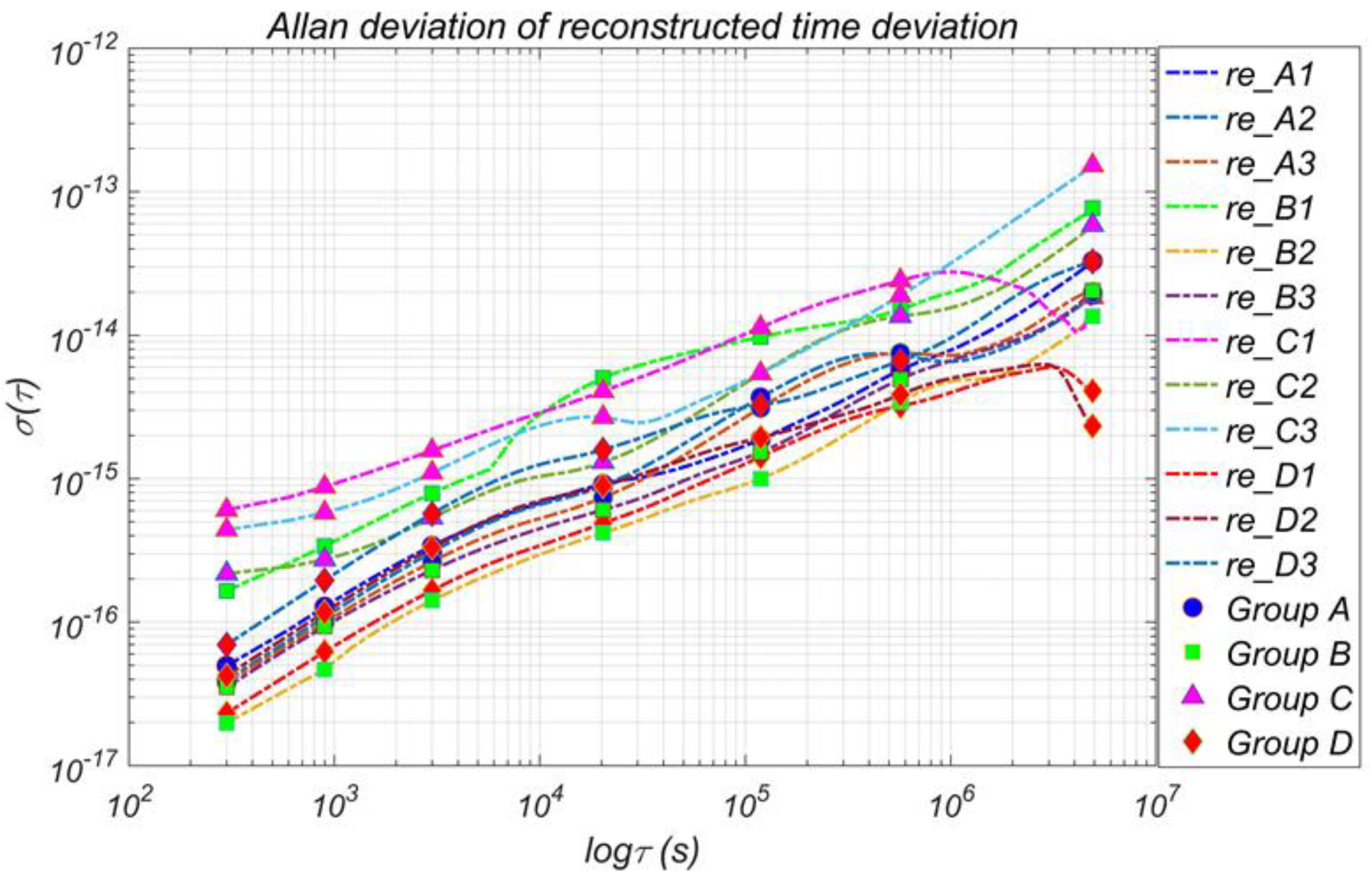
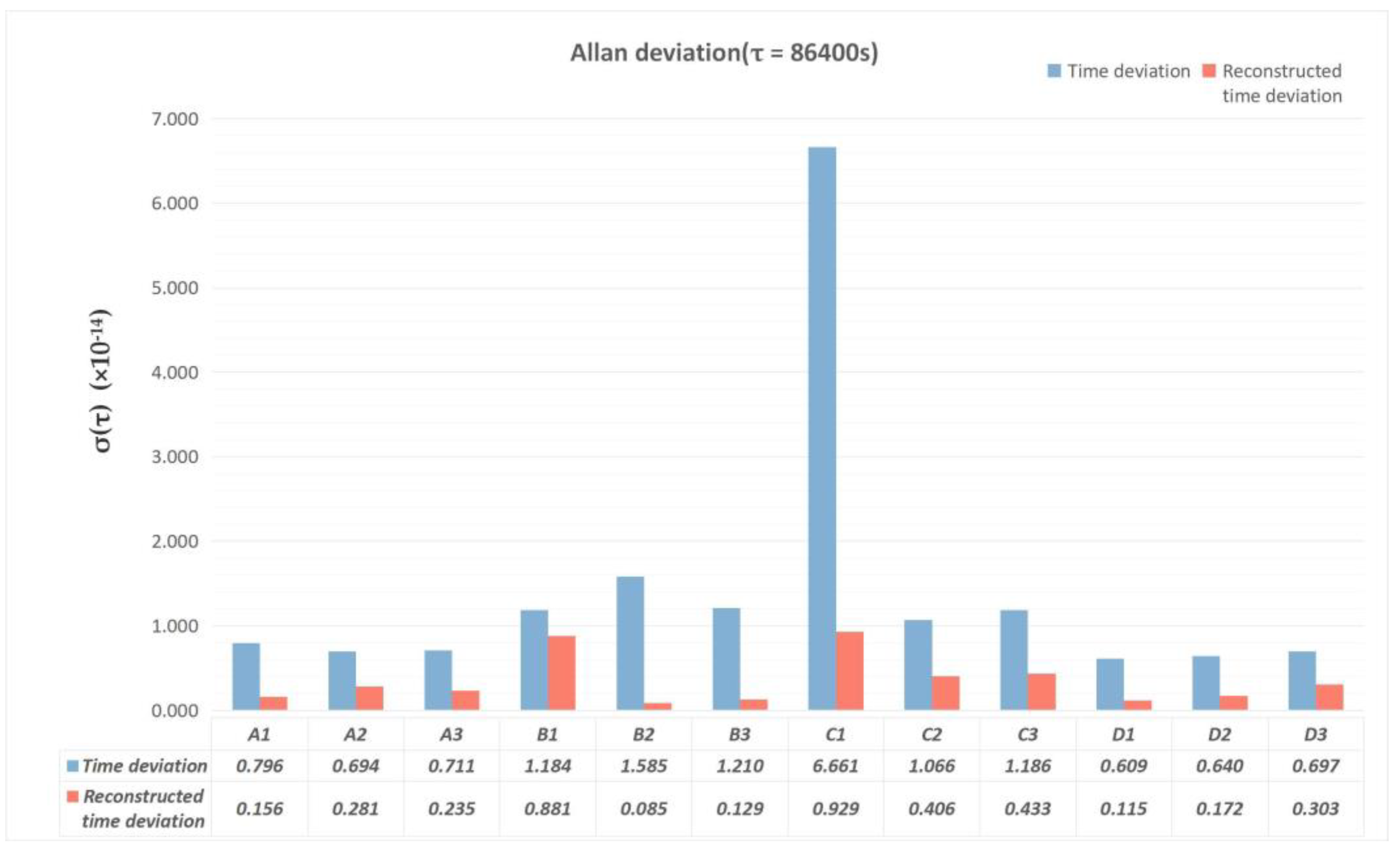
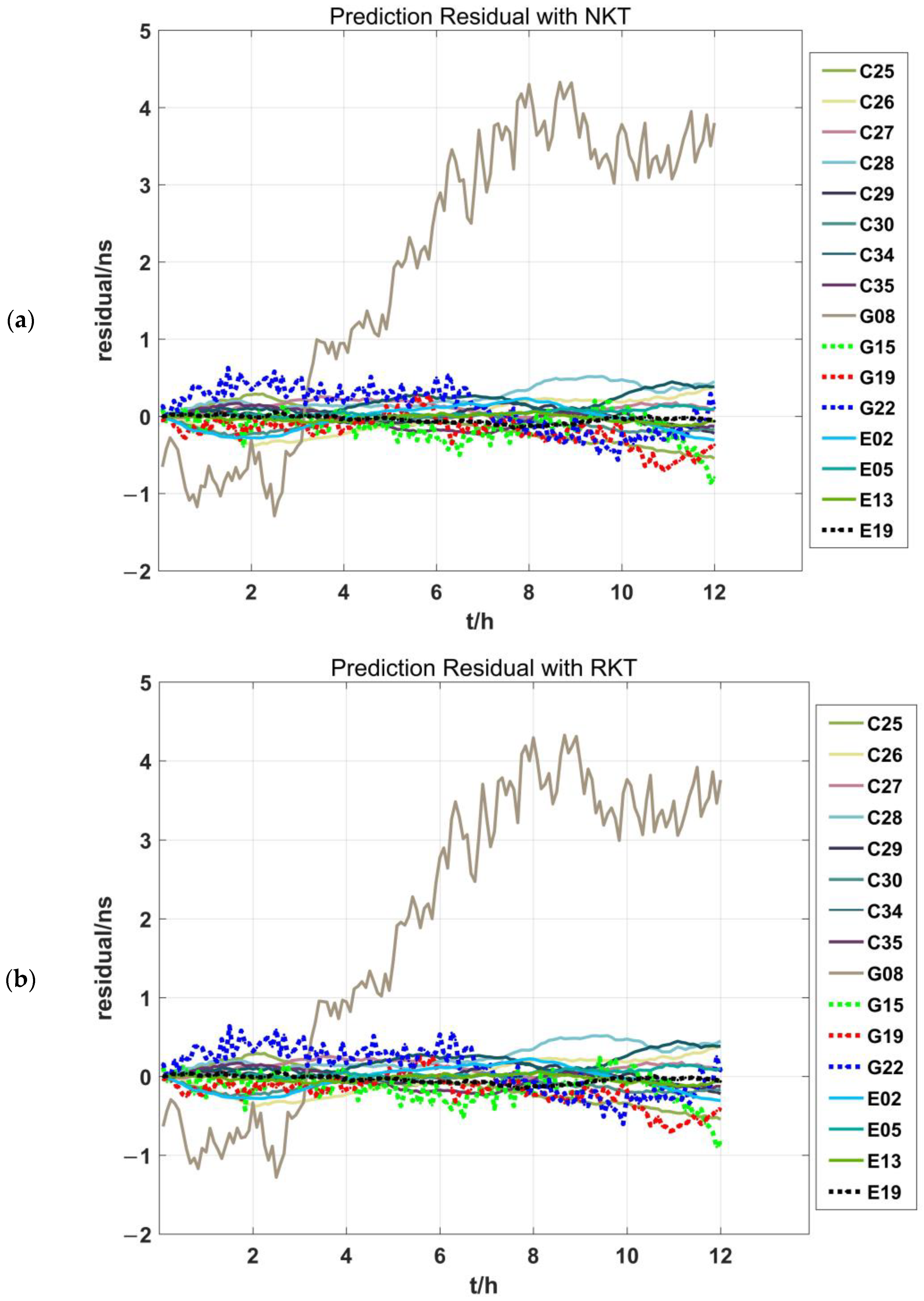
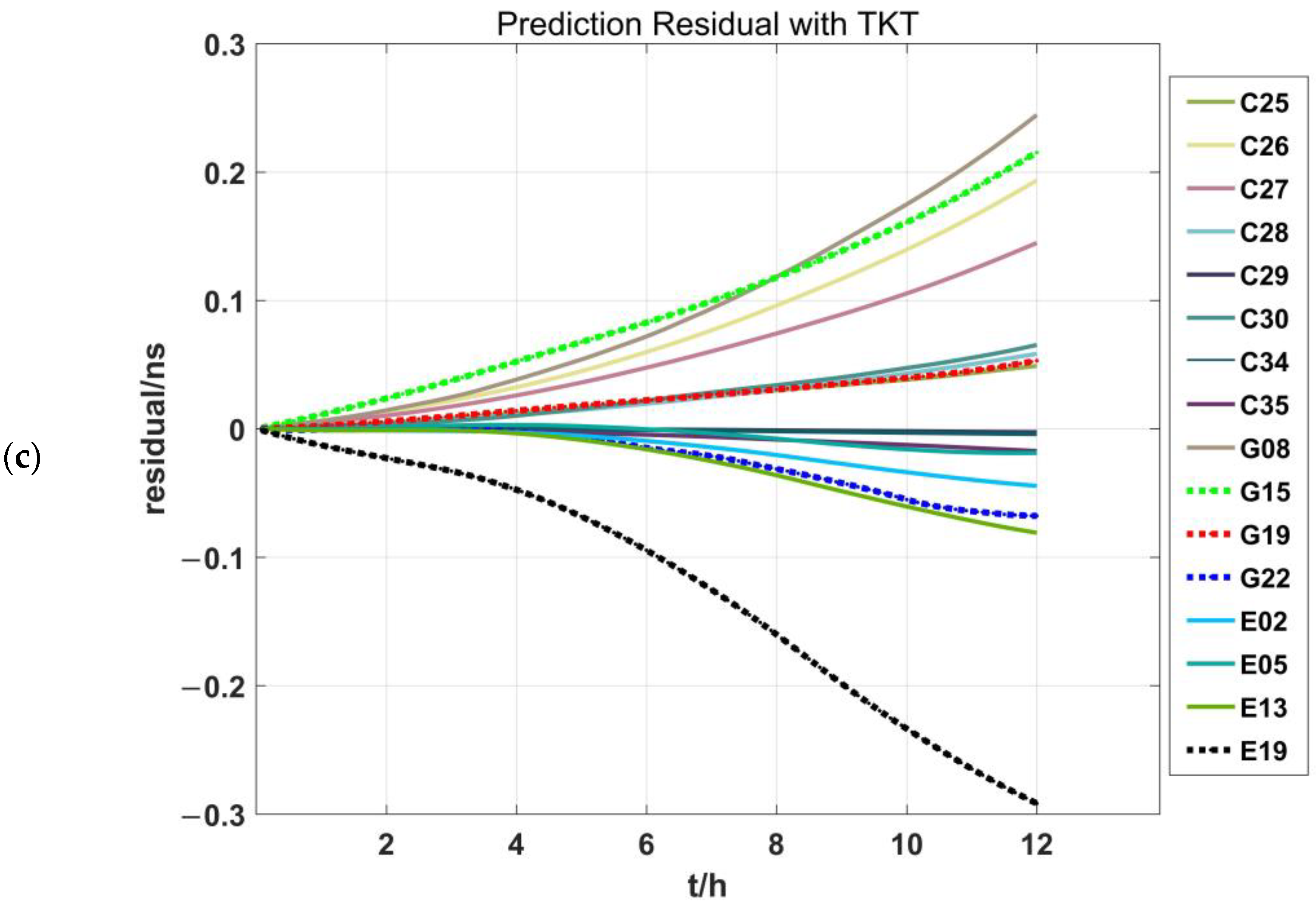
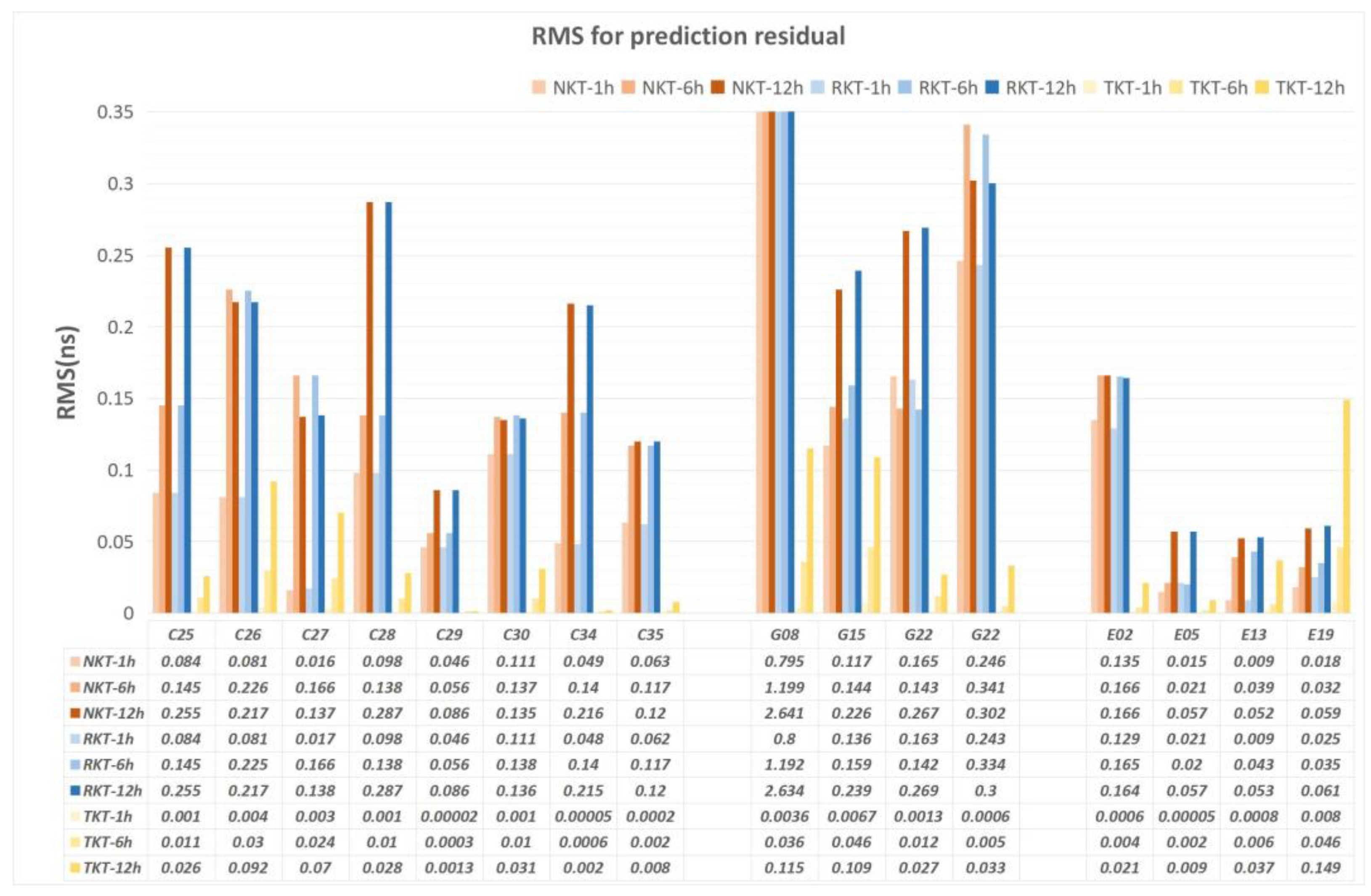
4.2. Satellite Clock Bias Prediction
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Batori, E.; Almat, N.; Affolderbach, C.; Mileti, G. GNSS-grade space atomic frequency standards: Current status and ongoing developments. Adv. Space Res. 2021, 68, 4723–4733. [Google Scholar] [CrossRef]
- Michalak, G.; Glaser, S.; Neumayer, K.H.; Konig, R. Precise orbit and Earth parameter determination supported by LEO satellites, inter-satellite links and synchronized clocks of a future GNSS. Adv. Space Res. 2021, 68, 4753–4782. [Google Scholar] [CrossRef]
- Giorgi, G.; Schmidt, T.D.; Trainotti, C.; Mata-Calvo, R.; Fuchs, C.; Hoque, M.M.; Berdermann, J.; Furthner, J.; Gunther, C.; Schuldt, T.; et al. Advanced technologies for satellite navigation and geodesy. Adv. Space Res. 2019, 64, 1256–1273. [Google Scholar] [CrossRef]
- Giorgi, G.; Kroese, B.; Michalak, G. Future GNSS constellations with optical inter-satellite links. Preliminary space segment analyses. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019. [Google Scholar]
- Glaser, S.; Michalak, G.; Mannel, B.; Konig, R.; Neumayer, K.H.; Schuh, H. Reference system origin and scale realization within the future GNSS constellation “Kepler”. J. Geod. 2020, 94, 13. [Google Scholar] [CrossRef]
- Gunther, C.; Inst, N. Kepler—Satellite Navigation without Clocks and Ground Infrastructure. In Proceedings of the 31st International Technical Meeting of the Satellite-Division-of-The-Institute-of-Navigation (ION GNSS), Miami, FL, USA, 24–28 September 2018; pp. 849–856. [Google Scholar]
- Panfilo, G.; Arias, E.F. Algorithms for International Atomic Time. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 140–150. [Google Scholar] [CrossRef]
- Parker, T.E.; Levine, J. Impact of new high stability frequency standards on the performance of the NIST AT1 time scale. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 1239–1244. [Google Scholar] [CrossRef] [Green Version]
- Jones, R.H.; Tryon, P.V. Estimating Time from Atomic Clocks. J. Res. Natl. Bur. Stand. 1983, 88, 17–24. [Google Scholar] [CrossRef]
- Weiss, M.A.; Allan, D.W.; Peppler, T.K. A Study of the NBS Time Scale Algorithm. IEEE Trans. Instrum. Meas. 1989, 38, 631–635. [Google Scholar] [CrossRef] [Green Version]
- Panfilo, G.; Harmegnies, A.; Tisserand, L. A new weighting procedure for UTC. Metrologia 2014, 51, 285–292. [Google Scholar] [CrossRef]
- Tavella, P. Statistical and mathematical tools for atomic clocks. Metrologia 2008, 45, S183–S192. [Google Scholar] [CrossRef]
- Zucca, C.; Tavella, P. The clock model and its relationship with the allan and related variances. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 289–296. [Google Scholar] [CrossRef]
- Schmidt, T.D.; Trainotti, C.; Isoard, J.; Giorgi, G.; Furthner, J.; Gunther, C.; Inst, N. Composite Clock Algorithms for System Time in Global Navigation Satellite Systems. In Proceedings of the 31st International Technical Meeting of the Satellite-Division-of-The-Institute-of-Navigation (ION GNSS), Miami, FL, USA, 24–28 September 2018; pp. 963–967. [Google Scholar]
- Brown, K.R. The Theory of the GPS Composite Clock. Ionics 1991, 4, 223–242. [Google Scholar]
- Greenhall, C.A. Forming stable timescales from the Jones-Tryon Kalman filter. Metrologia 2003, 40, S335–S341. [Google Scholar] [CrossRef]
- Keller, J.Y.; Darouach, M. Optimal two-stage Kalman filter in the presence of random bias. Automatica 1997, 33, 1745–1748. [Google Scholar] [CrossRef]
- Ren, W.; Li, T.; Qu, Q.Z.; Wang, B.; Li, L.; Lu, D.S.; Chen, W.B.; Liu, L. Development of a space cold atom clock. Natl. Sci. Rev. 2020, 7, 1828–1836. [Google Scholar] [CrossRef]
- Burt, E.A.; Yi, L.; Tucker, B.; Hamell, R.; Tjoelker, R.L. JPL Ultrastable Trapped Ion Atomic Frequency Standards. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 1013–1021. [Google Scholar] [CrossRef]
- Gharavipour, M.; Affolderbach, C.; Kang, S.; Bandi, T.N.; Gruet, F.; Pellaton, M.; Mileti, G. High performance vapour-cell frequency standards. J. Phys. Conf. Ser. 2016, 723, 012006. [Google Scholar] [CrossRef]
- Arpesi, P.; Belfi, J.; Gioia, M.; Marzoli, N.; Romani, R.; Sapia, A.; Gozzelino, M.; Calosso, C.; Levi, F.; Micalizio, S.; et al. Rubidium Pulsed Optically Pumped Clock for Space Industry. In Proceedings of the Joint Conference of the IEEE International Frequency Control Symposium/Conference of the European-Frequency-and-Time-Forum (EFTF/IFC), Orlando, FL, USA, 14–18 April 2019. [Google Scholar]
- Micalizio, S.; Calosso, C.E.; Levi, F.; Gozzelino, M.; Gioia, M.; Arpesi, P.; Sapia, A.; Romani, R.; Belfi, J.; Marzoli, N.; et al. Preliminary characterization of a Rb Pulsed Optically Pumped clock for space applications. In Proceedings of the IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Torino, Italy, 19–21 June 2019; pp. 682–686. [Google Scholar]
- Kitching, J. Chip-scale atomic devices. Appl. Phys. Rev. 2018, 5, 38. [Google Scholar] [CrossRef]
- Vanier, J.; Tomescu, C. The Quantum Physics of Atomic Frequency Standards: Recent Developments; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Koller, S.B.; Grotti, J.; Vogt, S.; Al-Masoudi, A.; Dorscher, S.; Hafner, S.; Sterr, U.; Lisdat, C. Transportable Optical Lattice Clock with 7 x 10(-17) Uncertainty. Phys. Rev. Lett. 2017, 118, 6. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; Hu, X.; Liu, L.; He, F.; Tang, C.; Pang, J. Status of Satellite Orbit Determination and Time Synchronization Technology for Global Navigation Satellites System. Acta Astron. Sin. 2019, 60, 32. [Google Scholar]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.G.; Zhao, Q.L.; Perosanz, F.; Romero, I.; Noll, C.; Sturze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Uhlemann, M.; Gendt, G.; Ramatschi, M.; Deng, Z.G. GFZ Global Multi-GNSS Network and Data Processing Results. In Proceedings of the Scientific Assembly of the International-Association-of-Geodesy (IAG), Potsdam, Germany, 1–6 September 2013; pp. 673–679. [Google Scholar]
- Yang, Y.; Yang, Y.; Wang, W.; Zhao, A. Accuracy Assessment for IGS MGEX Clock Products. J. Geomat. Sci. Technol. 2018, 35, 441–445. [Google Scholar]
- Fernandez, F.A. Inter-satellite ranging and inter-satellite communication links for enhancing GNSS satellite broadcast navigation data. Adv. Space Res. 2011, 47, 786–801. [Google Scholar] [CrossRef]
- Chen, J.; Hu, X.; Tang, C.; Zhou, S.; Guo, R.; Pan, J.; Li, R.; Zhu, L. Orbit determination and time synchronization for new-generation Beidou satellites: Preliminary results. Sci. Sin. Phys. Mech. Astron. 2016, 46, 85–95. [Google Scholar]
- Tang, C.P.; Hu, X.G.; Zhou, S.S.; Liu, L.; Pan, J.Y.; Chen, L.C.; Guo, R.; Zhu, L.F.; Hu, G.M.; Li, X.J.; et al. Initial results of centralized autonomous orbit determination of the new-generation BDS satellites with inter-satellite link measurements. J. Geod. 2018, 92, 1155–1169. [Google Scholar] [CrossRef]
- Pan, J.; Hu, X.; Tang, C.; Zhou, S.; Li, R.; Zhu, L.; Tang, G.; Hu, G.; Chang, Z.; Wu, S.; et al. System error calibration for time division multiple access inter-satellite payload of new-generation Beidou satellites. Chin. Sci. Bull. 2017, 62, 2671–2679. [Google Scholar] [CrossRef] [Green Version]
- Arias, F.; Jiang, Z.; Lewandowski, W.; Petit, G. BIPM comparison of time transfer techniques. In Proceedings of the IEEE International Frequency Control Symposium and Exposition, Vancouver, BC, Canada, 29–31 August 2005; pp. 312–315. [Google Scholar]
- Jiang, Z.; Lewandowski, W.W.; Konaté, H. TWSTFT Data Treatment for UTC Time Transfer. In Proceedings of the 41st Annual Precise Time and Time Interval Systems and Applications Meeting, Santa Ana Pueblo, New Mexico, 16–19 November 2009. [Google Scholar]
- Petit, G.; Meynadier, F.; Harmegnies, A.; Parra, C. Continuous IPPP links for UTC. Metrologia 2022, 59, 14. [Google Scholar] [CrossRef]
- Bauch, A.; Achkar, J.; Bize, S.; Calonico, D.; Dach, R.; Hlavac, R.; Lorini, L.; Parker, T.; Petit, G.; Piester, D.; et al. Comparison between frequency standards in Europe and the USA at the 10(-15) uncertainty level. Metrologia 2006, 43, 109–120. [Google Scholar] [CrossRef] [Green Version]
- Xue, W.X.; Zhao, W.Y.; Quan, H.L.; Xing, Y.; Zhang, S.G. Cascaded Microwave Frequency Transfer over 300-km Fiber Link with Instability at the 10(-18) Level. Remote Sens. 2021, 13, 2182. [Google Scholar] [CrossRef]
- Kassas, Z.M. Navigation from Low-Earth Orbit. In Position, Navigation, and Timing Technologies in the 21st Century; Wiley: Hoboken, NJ, USA, 2020; pp. 1381–1412. [Google Scholar]
- Hauschild, A.; Montenbruck, O.; Steigenberger, P.; Martini, I.; Fernandez-Hernandez, I. Orbit determination of sentinel-6A using the galileo high accuracy service test signal. GPS Solut. 2022, 26, 13. [Google Scholar] [CrossRef]
- Arnold, D.; Schaer, S.; Villiger, A.; Dach, R.; Jäggi, A. Undifference ambiguity resolution for GPS-based precise orbit determination of low Earth orbiters using the new CODE clock and phase bias products. In Proceedings of the International GNSS Service Workshop 2018, Wuhan, China, 29 October–2 November 2018. [Google Scholar]
- Tang, C.P.; Hu, X.G.; Chen, J.P.; Liu, L.; Zhou, S.S.; Guo, R.; Li, X.J.; He, F.; Liu, J.H.; Yang, J.H. Orbit determination, clock estimation and performance evaluation of BDS-3 PPP-B2b service. J. Geod. 2022, 96, 17. [Google Scholar] [CrossRef]
- Barnes, J.A.; Chi, A.R.; Cutler, L.S.; Healey, D.J.; Leeson, D.B.; McGunigal, T.E.; Mullen, J.A.; Smith, W.L.; Sydnor, R.L.; Vessot, R.F.C.; et al. Characterization of Frequency Stability. IEEE Trans. Instrum. Meas. 1971, IM20, 105–120. [Google Scholar] [CrossRef] [Green Version]
- Barnes, J.A.; Allan, D.W.; Jones, R.H.; Tryon, P.V. Stochastic models for atomic clocks. In Proceedings of the 14th Annual Precise Time and Time Interval Systems and Applications Meeting, Greenbelt, MD, USA, 30 November 1982. [Google Scholar]
- Wu, Z.Q.; Zhou, S.S.; Hu, X.G.; Liu, L.; Shuai, T.; Xie, Y.H.; Tang, C.P.; Pan, J.Y.; Zhu, L.F.; Chang, Z.Q. Performance of the BDS3 experimental satellite passive hydrogen maser. GPS Solut. 2018, 22, 13. [Google Scholar] [CrossRef]
- Xu, Y.; Zeng, A.; Mu, Y. Performance Evaluation and Analysis of Beidou-3 On-orbit Atomic Clock. In China Satellite Navigation Conference (CSNC) 2020 Proceedings; Springer Singapore: Singapore, 2020; Volume 3, pp. 196–209. [Google Scholar]
- Weiss, M.; Weissert, T. AT2, A New Time Scale Algorithm—AT1 Plus Frequency Variance. Metrologia 1991, 28, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Greenhall, C.A. A Review of Reduced Kalman Filters for Clock Ensembles. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 491–496. [Google Scholar] [CrossRef]
- Wu, Y.; Gong, H.; Zhu, X.; Liu, W.; Ou, G. Twice Atomic Clock Steering Algorithm and Its Application in Forming a GNSS Time Reference. Acta Electron. Sin. 2016, 44, 1742–1750. [Google Scholar]
- Galleani, L.; Sacerdote, L.; Tavella, P.; Zucca, C. A mathematical model for the atomic clock error. Metrologia 2003, 40, S257–S264. [Google Scholar] [CrossRef]
- Riley, W.J. Handbook of Frequency Stability Analysis; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2007.
- Petit, G.; Arias, F.; Panfilo, G. International atomic time: Status and future challenges. C. R. Phys. 2015, 16, 480–488. [Google Scholar] [CrossRef]
- Dong, S.; Wang, Y.; Wu, W.; Qu, L.; Yuan, H.; Zhao, S. Progress of TAI and timekeeping work in NTSC. J. Time Freq. 2018, 41, 73–79. [Google Scholar]
- Ge, H.B.; Li, B.F.; Wu, T.H.; Jiang, S.Q. Prediction models of GNSS satellite clock errors: Evaluation and application in PPP. Adv. Space Res. 2021, 68, 2470–2487. [Google Scholar] [CrossRef]
- Huang, G.W.; Cui, B.B.; Zhang, Q.; Fu, W.J.; Li, P.L. An Improved Predicted Model for BDS Ultra-Rapid Satellite Clock Offsets. Remote Sens. 2018, 10, 60. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Time Deviation | Allan Deviation (τ = 1 Day) |
|---|---|---|
| A | A1 | |
| A2 | ||
| A3 | ||
| B | B1 | |
| B2 | ||
| B3 | ||
| C | C1 | |
| C2 | ||
| C3 | ||
| D | D1 | |
| D2 | ||
| D3 |
| Time Series | Allan Deviation (τ = 300 s) | Allan Deviation (τ = 86,400 s) |
|---|---|---|
| TA_A | ||
| TA_B | ||
| TA_C | ||
| TA_D | ||
| TA_A-TA_B | ||
| TA_A-TA_C | ||
| TA_A-TA_D |
| Time Series | Allan Deviation (τ = 300 s) | Allan Deviation (τ = 86,400 s) |
|---|---|---|
| TA_A | ||
| TA_B | ||
| TA_C | ||
| TA_D | ||
| TA_A-TA_B | ||
| TA_A-TA_C | ||
| TA_A-TA_D |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Xing, N.; Tang, C.; Chang, Z. Clock Ensemble Algorithm Test in the Establishment of Space-Based Time Reference. Remote Sens. 2023, 15, 1227. https://doi.org/10.3390/rs15051227
Chen G, Xing N, Tang C, Chang Z. Clock Ensemble Algorithm Test in the Establishment of Space-Based Time Reference. Remote Sensing. 2023; 15(5):1227. https://doi.org/10.3390/rs15051227
Chicago/Turabian StyleChen, Guangyao, Nan Xing, Chengpan Tang, and Zhiqiao Chang. 2023. "Clock Ensemble Algorithm Test in the Establishment of Space-Based Time Reference" Remote Sensing 15, no. 5: 1227. https://doi.org/10.3390/rs15051227
APA StyleChen, G., Xing, N., Tang, C., & Chang, Z. (2023). Clock Ensemble Algorithm Test in the Establishment of Space-Based Time Reference. Remote Sensing, 15(5), 1227. https://doi.org/10.3390/rs15051227