

Study on Rapid Inversion of Soil Water Content from Ground-Penetrating Radar Data Based on Deep Learning

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Principle of VSWC Inversion Based on Deep Learning
2.2. The Structure of CNN-Based Framework GPRSW
2.3. Data Preparation and Network Training
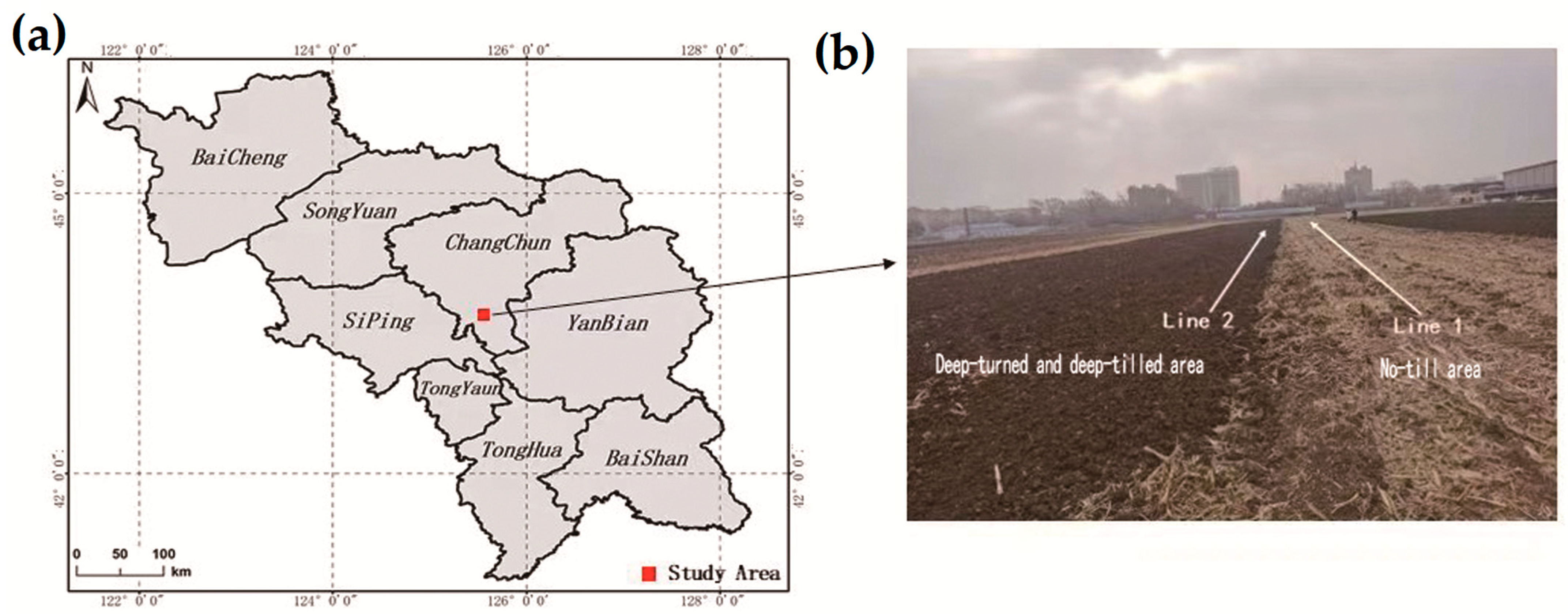
2.4. Principle of Field Soil Sampling and TDR Soil Probe Samples
2.4.1. Principle of Field Soil Sampling
2.4.2. Principle of TDR Soil Probe Samples
3. Results
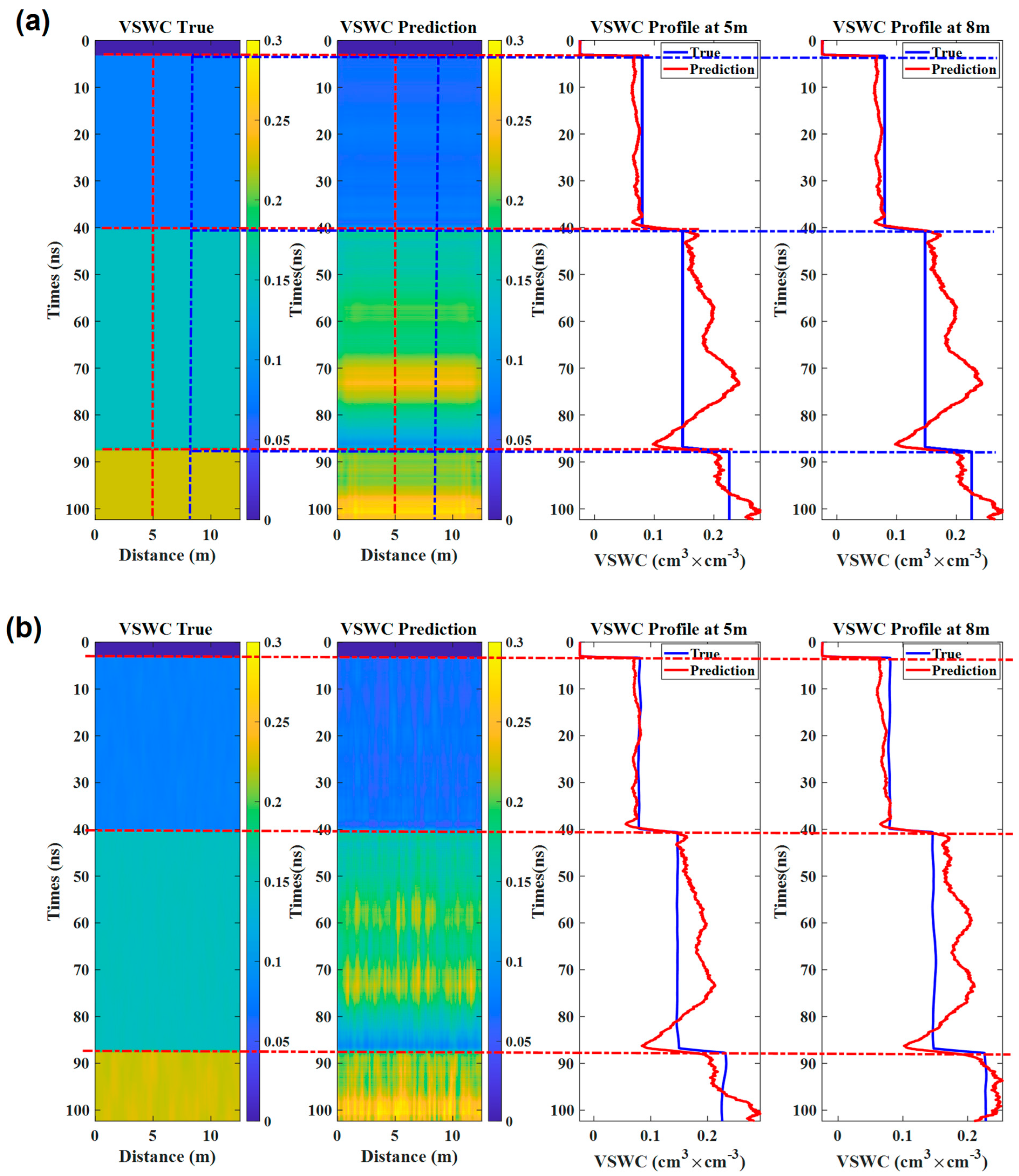
3.1. Synthetic Experiments
3.2. Field Experiments
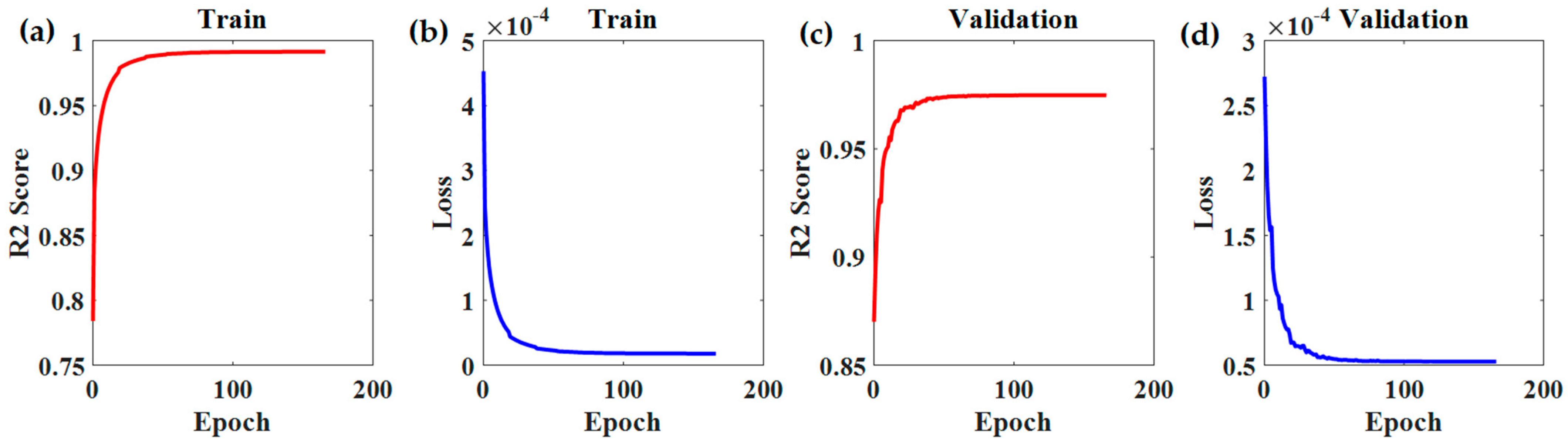
3.2.1. Data Preparation and Network Training
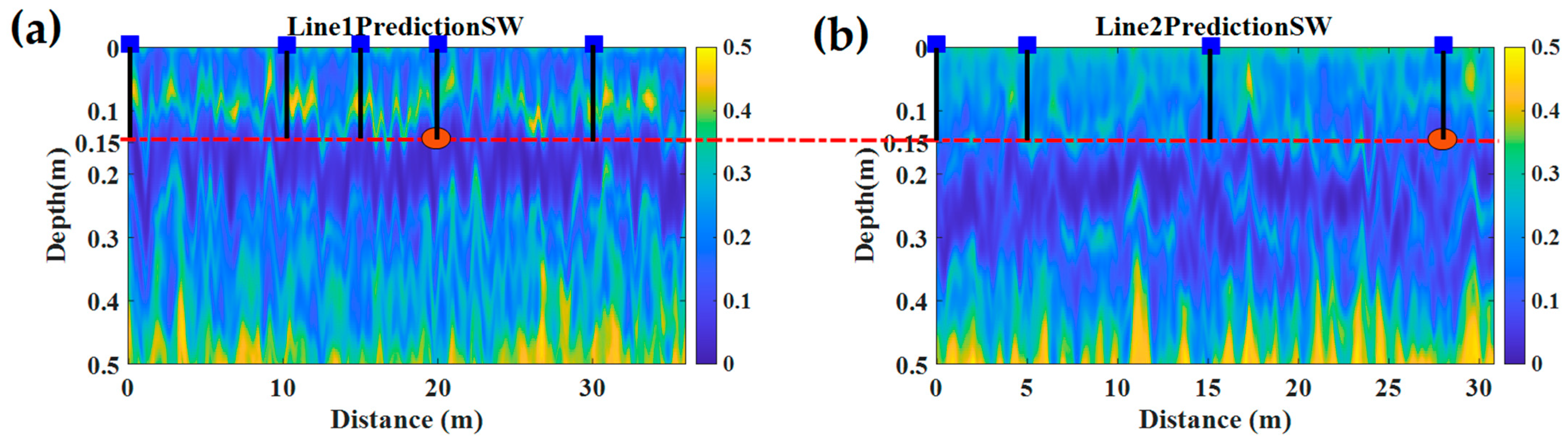
3.2.2. Inversion of Volumetric Soil Water Content in Farmland Fields
3.2.3. Field Soil Samples and TDR Soil Probe Samples
3.2.4. Comparison Verification
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, K. Effects of Soil Moisture and Irrigation Patterns during Grain Filling on Grain Yield and Quality of Rice and Their Physiological Mechanism. Acta Agron. Sin. 2008, 34, 268–276. [Google Scholar] [CrossRef]
- Nielsen, D.C.; Vigil, M.F.; Benjamin, J.G. The variable response of dryland corn yield to soil water content at planting. Agric. Water Manag. 2009, 96, 330–336. [Google Scholar] [CrossRef]
- Li, W.; O’Kelly, B.C.; Fang, K.; Yang, M. Briefing: Water content determinations of peaty soils using the oven-drying method. Environ. Geotech. 2022, 9, 3–11. [Google Scholar] [CrossRef]
- Gurav, M.; Sarik, S.; Singh, K.; Pendharkar, G.; Baghini, M.S. IITB_TDR: A portable TDR system with DWT based denoising for soil moisture measurement. Sens. Actuator A Phys. 2018, 283, 317–329. [Google Scholar] [CrossRef]
- Evol’s’kii, S.T.; Kulik, V.V. Measurement of the moisture content and salinity of soils by steady-state neutron methods. Dopovidi Natsional’noi Akad. Nauk Ukr. 2002, 7, 146–151. [Google Scholar]
- Schwartz, B.F.; Schreiber, M.E.; Yan, T.T. Quantifying field-scale soil moisture using electrical resistivity imaging. J. Hydrol. 2008, 362, 234–246. [Google Scholar] [CrossRef]
- Zhang, W.; Bi, L.; Chang, Y.; Li, B. Estimation of soil water content of internal different layers using ground-penetrating radar signals. J. Adv. Sci. Lett. 2012, 9, 417–422. [Google Scholar] [CrossRef]
- Yu, Y.; Klotzsche, A.; Weihermuller, L.; Huisman, J.A.; Vanderborght, J.; Vereecken, H.; van der Kruk, J. Measuring vertical soil water content profiles by combining horizontal borehole and dispersive surface ground penetrating radar data. Near Surf. Geophys. 2020, 18, 275–294. [Google Scholar] [CrossRef] [Green Version]
- Weihermuller, L.; Huisman, J.A.; Lambot, S.; Herbst, M.; Vereecken, H. Mapping the spatial variation of soil water content at the field scale with different ground penetrating radar techniques. J. Hydrol. 2007, 340, 205–216. [Google Scholar] [CrossRef] [Green Version]
- Ardekani, M.R.M. Off- and on-ground GPR techniques for field-scale soil moisture mapping. Geoderma 2013, 200, 55–66. [Google Scholar] [CrossRef]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, A.P. Measuring Soil Water Content with Ground Penetrating Radar: A Review. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Antonucci, F.; Pallottino, F.; Costa, C.; Rimatori, V.; Giorgi, S.; Papetti, P.; Menesatti, P. Development of a Rapid Soil Water Content Detection Technique Using Active Infrared Thermal Methods for In-Field Applications. Sensors 2011, 11, 10114–10128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- El Alem, A.; Hmaissia, A.; Chokmani, K.; Cambouris, A.N. Quantitative Study of the Effect of Water Content on Soil Texture Parameters and Organic Matter Using Proximal Visible-Near Infrared Spectroscopy. Remote Sens. 2022, 14, 3510. [Google Scholar] [CrossRef]
- Wagner, W.; Bloschl, G.; Pampaloni, P.; Calvet, J.C.; Bizzarri, B.; Wigneron, J.P.; Kerr, Y. Operational readiness of microwave remote sensing of soil moisture for hydrologic applications. Nord. Hydrol. 2007, 38, 1–20. [Google Scholar] [CrossRef]
- Wang, L.L.; Qu, J.J. Satellite remote sensing applications for surface soil moisture monitoring: A review. Front. Earth Sci. China 2009, 3, 237–247. [Google Scholar] [CrossRef]
- Galagedara, L.W.; Parkin, G.W.; Redman, J.D.; von Bertoldi, P.; Endres, A.L. Field studies of the GPR ground wave method for estimating soil water content during irrigation and drainage. J. Hydrol. 2005, 301, 182–197. [Google Scholar] [CrossRef]
- de Oliveira, L.A.; Medeiros, H.R.; Macedo, D.; Zanchettin, C.; Oliveira, A.L.I.; Ludermir, T. SegNetRes-CRF: A Deep Convolutional Encoder-Decoder Architecture for Semantic Image Segmentation. In Proceedings of the IEEE IJCNN 2018, Rio de Janeiro, Brazil, 8–13 July 2018. [Google Scholar]
- Han, X. MR-based synthetic CT generation using a deep convolutional neural network method. Med. Phys. 2017, 44, 1408–1419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, B.C.; Jiang, P.; Guo, Q.; Wang, C.W. Deep Learning Inversion of Electrical Resistivity Data by One-Sided Mapping. IEEE Signal Proc. Lett. 2022, 29, 2248–2252. [Google Scholar] [CrossRef]
- Liu, B.; Pang, Y.H.; Mao, D.Q.; Wang, J.; Liu, Z.Y.; Wang, N.; Liu, S.H.; Zhang, X.X. A rapid four-dimensional resistivity data inversion method using temporal segmentation. Geophys. J. Int. 2020, 221, 586–602. [Google Scholar] [CrossRef]
- Wu, Y.; Lin, Y.; Zhou, Z. Inversionnet: Accurate and Efficient Seismic Waveform Inversion with Convolutional Neural Networks. In Proceedings of the 2018 SEG International Exposition and Annual Meeting, Anaheim, CA, USA, 14–19 October 2018; pp. 2096–2100. [Google Scholar]
- Zheng, Y.; Zhang, Q.; Yusifov, A.; Shi, Y.Z. Applications of Supervised Deep Learning for Seismic Interpretation and Inversion. J. Lead. Edge 2019, 38, 526–533. [Google Scholar] [CrossRef]
- Araya-Polo, M.; Dahlke, T.; Frogner, C.; Zhang, C.; Poggio, T.; Hohl, D. Automated fault detection without seismic processing. J. Lead. Edge 2017, 36, 208–214. [Google Scholar] [CrossRef]
- Wu, Y.; Lin, Y.Z. InversionNet: An Efficient and Accurate Data-Driven Full Waveform Inversion. IEEE Trans. Comput. Imag. 2020, 6, 419–433. [Google Scholar] [CrossRef]
- Yang, F.S.; Ma, J.W. Deep-learning inversion: A next-generation seismic velocity model building method. Geophysics 2019, 84, R583–R599. [Google Scholar] [CrossRef] [Green Version]
- Li, S.C.; Liu, B.; Ren, Y.X.; Chen, Y.K.; Yang, S.L.; Wang, Y.H.; Jiang, P. Deep-Learning Inversion of Seismic Data. IEEE Trans. Geosci. Remote 2020, 58, 2135–2149. [Google Scholar] [CrossRef] [Green Version]
- Pham, M.T.; Lefevre, S. Buried Object Detection from B-Scan Ground Penetrating Radar Data Using Faster-Rcnn. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6804–6807. [Google Scholar]
- Lei, W.T.; Hou, F.F.; Xi, J.C.; Tan, Q.Y.; Xu, M.D.; Jiang, X.Y.; Liu, G.Y.; Gu, Q.Y. Automatic hyperbola detection and fitting in GPR B-scan image. Automat. Constr. 2019, 106, 102839. [Google Scholar] [CrossRef]
- Li, Y.H.; Zhao, Z.X.; Luo, Y.F.; Qiu, Z. Real-Time Pattern-Recognition of GPR Images with YOLO v3 Implemented by Tensorflow. Sensors 2020, 20, 6476. [Google Scholar] [CrossRef]
- Khudoyarov, S.; Kim, N.; Lee, J.J. Three-dimensional convolutional neural network-based underground object classification using three-dimensional ground penetrating radar data. Struct. Health Monit. 2020, 19, 1884–1893. [Google Scholar] [CrossRef]
- Gao, Y.; Pei, L.; Wang, S.; Li, W. Intelligent Detection of Urban Road Underground Targets by Using Ground Penetrating Radar based on Deep Learning. J. Phys. Conf. Ser. 2021, 1757, 012081. [Google Scholar] [CrossRef]
- Jie, Y.; Fubin, S.; Pengli, Z.; Jiaming, W.; Chao, C. Application of Deep Learning in Ground Penetrating Radar Image Recognition; Institute of Water Resources and Hydro-Electric Engineering, Xi’an University of Technology: Xi’an, China; Hanjiang-to-Weihe River Vally Water Diversion Project Construction Co., Ltd.: Xi’an, China, 2021. [Google Scholar]
- Tong, Z.; Gao, J.; Zhang, H.T. Recognition, location, measurement, and 3D reconstruction of concealed cracks using convolutional neural networks. Constr. Build. Mater. 2017, 146, 775–787. [Google Scholar] [CrossRef]
- Alvarez, J.K.; Kodagoda, S. Application of deep learning image-to-image transformation networks to GPR radargrams for sub-surface imaging in infrastructure monitoring. In Proceedings of the 13th IEEE Conference on Industrial Electronics and Applications 2018, Wuhan, China, 31 May–2 June 2018; pp. 611–616. [Google Scholar]
- Leong, Z.X.; Zhu, T.Y. Direct Velocity Inversion of Ground Penetrating Radar Data Using GPRNet. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021047. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. A Machine Learning-Based Fast-Forward Solver for Ground Penetrating Radar with Application to Full-Waveform Inversion. IEEE Trans. Geosci. Remote 2019, 57, 4417–4426. [Google Scholar] [CrossRef] [Green Version]
- Leong, Z.X. GPRNet [Software]. Zenodo 2020. [Google Scholar] [CrossRef]
- Lai, W.W.L.; Derobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. Ndt&E Int. 2018, 96, 58–78. [Google Scholar]
- Topp, G.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef] [Green Version]
- Nair, V.; Hinton, G.E. Rectified Linear Units Improve Restricted Boltzmann Machines. In Proceedings of the 27th International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Irving, J.; Knight, R. Numerical modeling of ground-penetrating radar in 2-D using MATLAB. Comput. Geosci. 2006, 32, 1247–1258. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Output Shape | Layer Details |
|---|---|---|
| GPR Data | L | |
| Conv1 + Pool1 + Dropout | L/2 × n | k kernel size, n filters, 1 stride, 2 pool size |
| Conv2 + Pool2 + Dropout | L/4 × 2n | k kernel size, 2n filters, 1 stride, 2 pool size |
| Conv3 + Pool3 + Dropout | L/8 × 4n | k kernel size, 4n filters, 1 stride, 2 pool size |
| Conv4 + Pool4 + Dropout | L/16 × 8n | k kernel size, 8n filters, 1 stride, 2 pool size |
| Diconv 1 + Dropout | L/16 × 16n | k kernel size, 16n filters, 1 stride, 1 dilation rate |
| Diconv 2 + Dropout | L/16 × 16n | k kernel size, 16n filters, 1 stride, 6 dilation rate |
| Diconv 3 + Dropout | L/16 × 16n | k kernel size, 16n filters, 1 stride, 12 dilation rate |
| Diconv 4 + Dropout | L/16 × 16n | k kernel size, 16n filters, 1 stride, 18 dilation rate |
| Diconv + Dropout | L/16 × 72n | Concatenates Pool4, Diconv 1–Diconv 4 |
| MgConv+ Dropout | L/16 × 16n | 3 kernel size, 16n filters, 1 stride |
| Deconv1 + Up1 + Dropout | L/8 × 16n | k kernel size, 16n filters, 1 stride, 2 up size |
| Deconv2 + Up2 + Dropout | L/4 × 8n | k kernel size, 8n filters, 1 stride, 2 up size |
| UpMgConv+Merge+ Dropout | L/4 × 24n | Concatenates UpMgConv and up2 |
| Deconv3 + Up3 + Dropout | L/2 × 4n | k kernel size, 4n filters, 1 stride, 2 up size |
| Deconv4 + Up4 + Dropout | L × 2n | k kernel size, 2n filters, 1 stride, 2 up size |
| Deconv5 + Gaussian dropout | L × 1 | k kernel size, 1 filter, 1 stride, 2 up size |
| VSWC | L |
| Parameters | Value |
|---|---|
| Radar Type | Mala ProEx |
| Antenna Center Frequency | 500 MHz |
| Bandwidth | 500 MHz |
| Sampling Window | 57 ns |
| Number of Samples | 766 |
| Parameters/Units | Survey Line 1 | Survey Line 2 |
|---|---|---|
| Net weight of wet soil/g | 59.0654 | 53.2606 |
| Net weight of dry earth/g | 47.9557 | 43.6133 |
| Dry soil volume/cm3 | 40 | 35 |
| Volumetric weight g/cm3 | 1.4732 | 1.5184 |
| Porosity | 44.4075% | 42.7019% |
| Volume water content/cm3 × cm−3 | 28.4% | 20.86% |
| Survey Line | Position | Volumetric Water Content | Mean Value |
|---|---|---|---|
| 1 (No-till area) | 0 m | 32.91% | 28.44% |
| Description: The soil surface layer at line 1 is denser than at line 2, and the surface layer is covered with a large amount of straw. | 10 m | 27.68% | |
| 15 m | 27.6% | ||
| 20 m | 25.6% | ||
| 30 m | 28.4% | ||
| 2 (Deep-turned and deep-tilled area) | 0 m | 23.8% | 20.65% |
| 5 m | 22.19% | ||
| 15 m | 15.73% | ||
| 27 m | 20.86% |
| Survey Line | Position | Prediction SW | Field Sample | TDR | Mean Value | Standard Deviation |
|---|---|---|---|---|---|---|
| 1 (No-till area) | 0 m | 34.12% | 32.91% | 33.52% | 0.61% | |
| 10 m | 30.37% | 27.68% | 29.03% | 1.35% | ||
| 15 m | 29.69% | 27.6% | 28.65% | 1.05% | ||
| 20 m | 27.71% | 28.4% | 25.6% | 27.24% | 1.19% | |
| 30 m | 28.31% | 28.4% | 28.36% | 0.05% | ||
| 2 (Deep-turned and deep-tilled area) | 0 m | 25.42% | 23.8% | 24.61% | 0.81% | |
| 5 m | 23.01% | 22.19% | 22.60% | 0.41% | ||
| 15 m | 18.59% | 15.73% | 17.16% | 1.43% | ||
| 27 m | 22.2% | 20.86% | 20.86% | 21.31% | 0.63% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zeng, Z.; Xiong, H.; Lu, Q.; An, B.; Yan, J.; Li, R.; Xia, L.; Wang, H.; Liu, K. Study on Rapid Inversion of Soil Water Content from Ground-Penetrating Radar Data Based on Deep Learning. Remote Sens. 2023, 15, 1906. https://doi.org/10.3390/rs15071906
Li Z, Zeng Z, Xiong H, Lu Q, An B, Yan J, Li R, Xia L, Wang H, Liu K. Study on Rapid Inversion of Soil Water Content from Ground-Penetrating Radar Data Based on Deep Learning. Remote Sensing. 2023; 15(7):1906. https://doi.org/10.3390/rs15071906
Chicago/Turabian StyleLi, Zhilian, Zhaofa Zeng, Hongqiang Xiong, Qi Lu, Baizhou An, Jiahe Yan, Risheng Li, Longfei Xia, Haoyu Wang, and Kexin Liu. 2023. "Study on Rapid Inversion of Soil Water Content from Ground-Penetrating Radar Data Based on Deep Learning" Remote Sensing 15, no. 7: 1906. https://doi.org/10.3390/rs15071906
APA StyleLi, Z., Zeng, Z., Xiong, H., Lu, Q., An, B., Yan, J., Li, R., Xia, L., Wang, H., & Liu, K. (2023). Study on Rapid Inversion of Soil Water Content from Ground-Penetrating Radar Data Based on Deep Learning. Remote Sensing, 15(7), 1906. https://doi.org/10.3390/rs15071906