
Optimizing Observation Plans for Identifying Faxon Fir (Abies fargesii var. Faxoniana) Using Monthly Unmanned Aerial Vehicle Imagery

 ,
,  , , , , ,
, , , , , 
Abstract
:1. Introduction
2. Materials and Methods
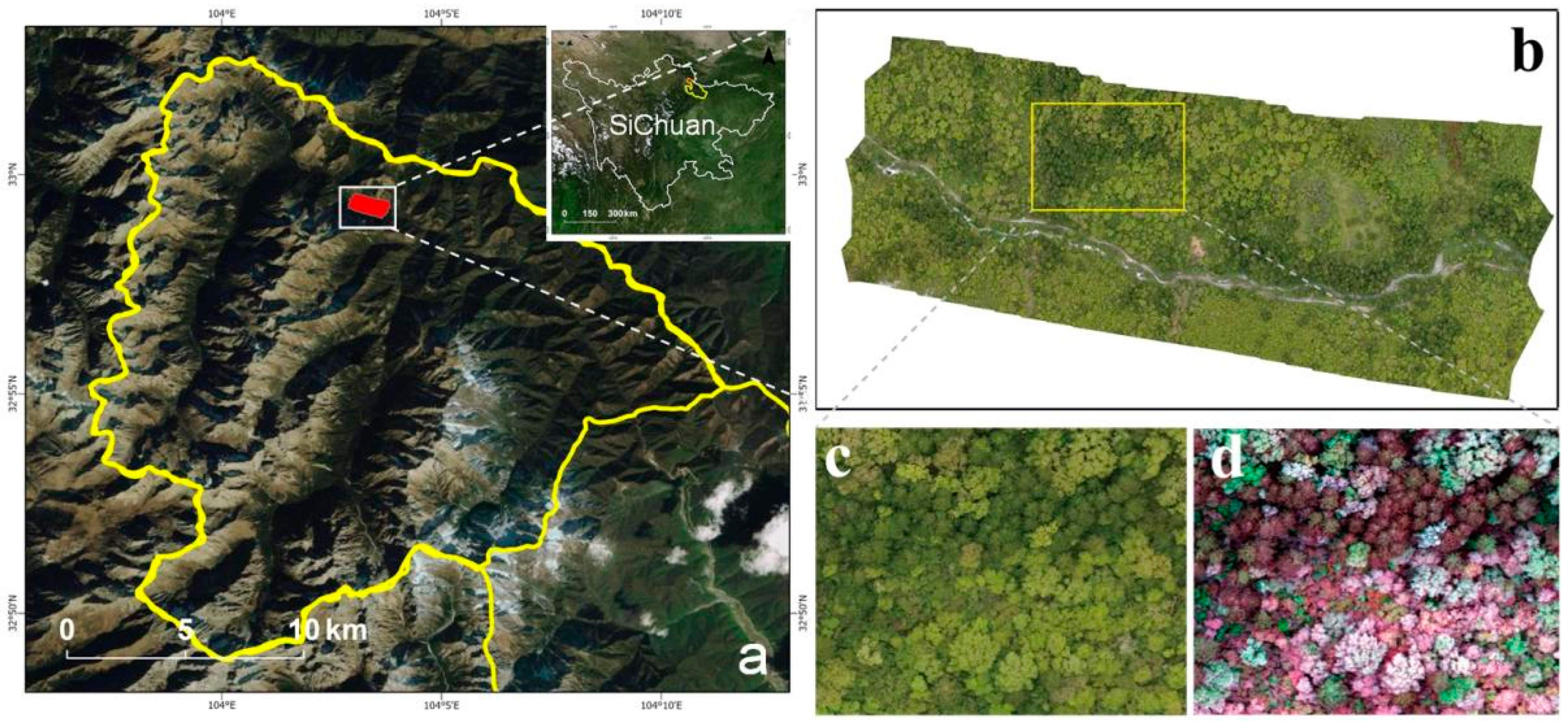
2.1. Study Area
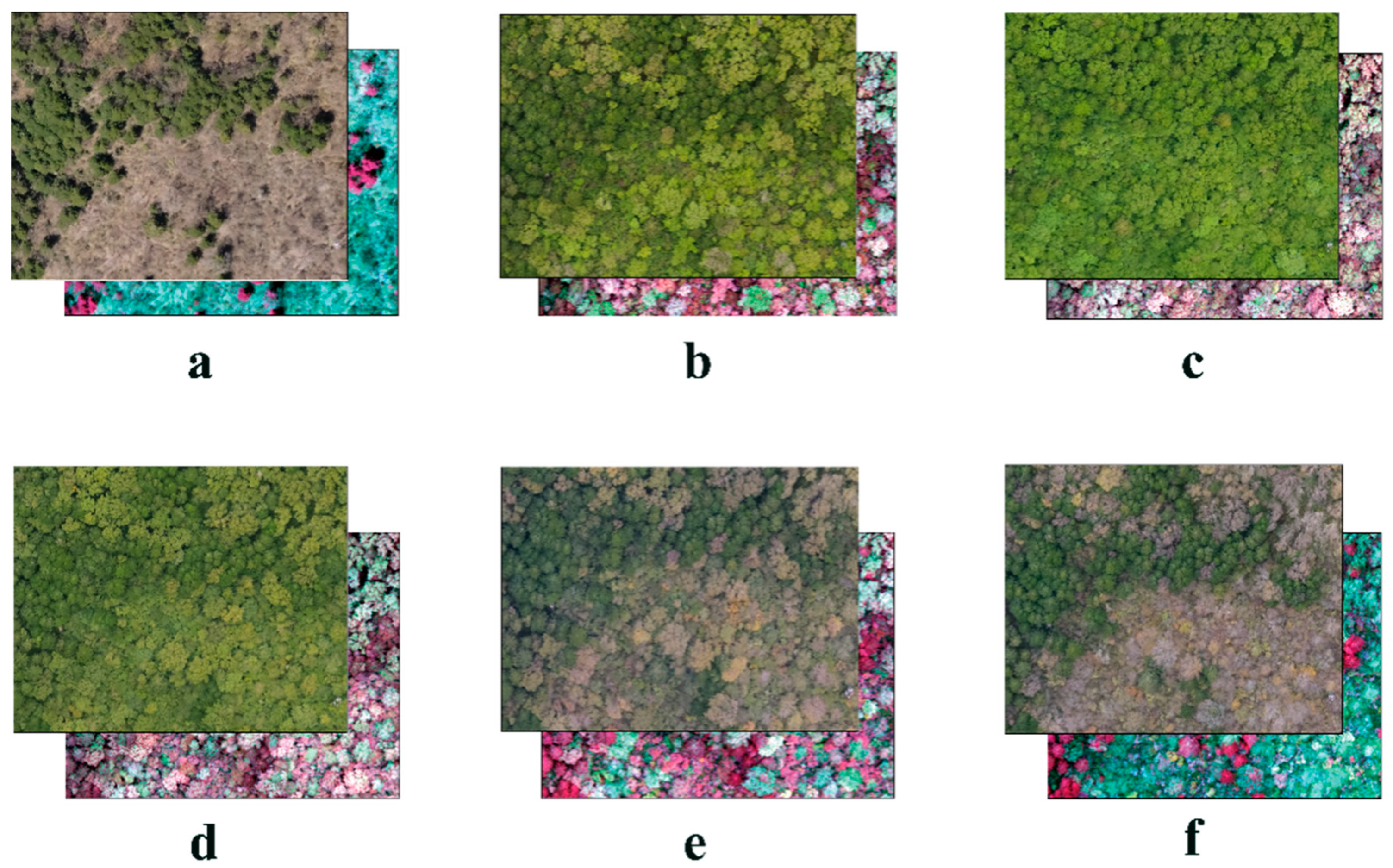
2.2. Data Acquisition
2.3. Vegetation Indices (VIs)
- (1)
- Multispectral VIs
- (2)
- RGB VIs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | VI Name | Abbreviation | Equation and Derivation |
|---|---|---|---|
| Normalized difference vegetation index [61,62,63] | NDVI | (NIR − Red)/(NIR + Red) | |
| Multispectral imagery | Red-edge NDVI [64] | NDVIre | (NIR − RE)/(NIR + RE) |
| Green normalized difference vegetation index [65] | GNDVI | (NIR−Green)/(NIR + Green) | |
| Normalized green red difference Index [61] | NGRDI | (Green − Red)/(Green + Red) | |
| RGB imagery | Normalized green blue difference index [66] | NGBDI | (Green − Blue)/(Green + Blue) |
| Visible-band Difference Vegetation Index [59] | VDVI | (2 × Green − Blue − Red)/ (2 × Green + Blue + Red) |
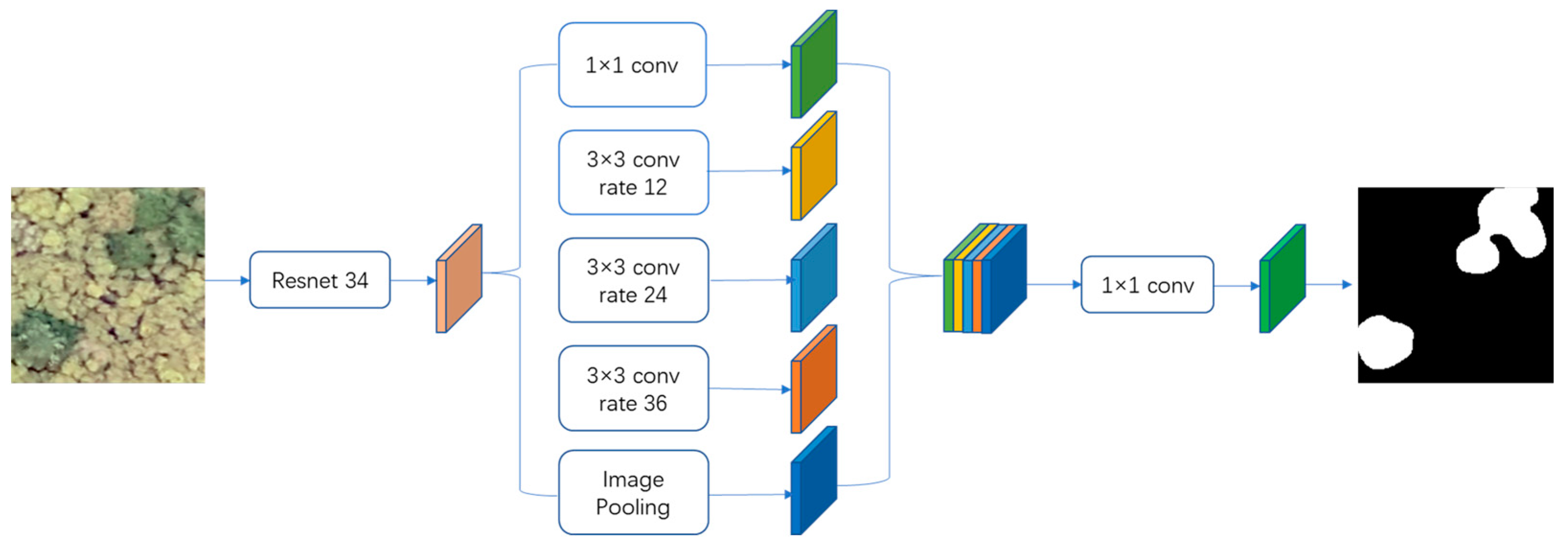
2.4. Classification Method
2.5. Classification Accuracy Assessment
3. Results
3.1. Model Accuracy in Different Months
3.2. Comparison of the Multispectral and RGB Models
3.3. Model Accuracy with Added VIs
4. Discussion
4.1. Model Performance in Different Months
4.2. Differences in the Capabilities of Multispectral and RGB Imagery
4.3. Potential of Vegetation Indices in Tree Species Classification Using CNN
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Taylor, A.H.; Wei, J.S.; Jun, Z.L.; Ping, L.C.; Jin, M.C.; Jinyan, H. Regeneration patterns and tree species coexistence in old-growth Abies–Picea forests in southwestern China. For. Ecol. Manag. 2006, 223, 303–317. [Google Scholar] [CrossRef]
- Chen, L.; Wang, M.; Jiang, C.; Wang, X.; Feng, Q.; Liu, X.; Sun, O.J. Choices of ectomycorrhizal foraging strategy as an important mechanism of environmental adaptation in Faxon fir (Abies fargesii var. faxoniana). For. Ecol. Manag. 2021, 495, 119372. [Google Scholar] [CrossRef]
- Guo, M.; Zhang, Y.; Liu, S.; Gu, F.; Wang, X.; Li, Z.; Shi, C.; Fan, Z. Divergent growth between spruce and fir at alpine treelines on the east edge of the Tibetan Plateau in response to recent climate warming. Agric. For. Meteorol. 2019, 276–277, 107631. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, L.; Chen, E.; Li, Z.; Xu, K.; Ding, X. An Improved Generalized Hierarchical Estimation Framework with Geostatistics for Mapping Forest Parameters and Its Uncertainty: A Case Study of Forest Canopy Height. Remote Sens. 2022, 14, 568. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Liao, X.; Xiao, Q.; Zhang, H. UAV remote sensing: Popularization and expand application development trend. J. Remote Sens. 2019, 23, 1046–1052. [Google Scholar]
- Peng, J.; Wang, D.; Liao, X.; Shao, Q.; Sun, Z.; Yue, H.; Ye, H. Wild animal survey using UAS imagery and deep learning: Modified Faster R-CNN for kiang detection in Tibetan Plateau. ISPRS J. Photogramm. Remote Sens. 2020, 169, 364–376. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, J.; Lian, J.; Fan, Z.; Ouyang, X.; Ye, W. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biol. Conserv. 2016, 198, 60–69. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Gobbi, B.; Van Rompaey, A.; Gasparri, N.I.; Vanacker, V. Forest degradation in the Dry Chaco: A detection based on 3D canopy reconstruction from UAV-SfM techniques. For. Ecol. Manag. 2022, 526, 120554. [Google Scholar] [CrossRef]
- Apostol, B.; Petrila, M.; Lorenţ, A.; Ciceu, A.; Gancz, V.; Badea, O. Species discrimination and individual tree detection for predicting main dendrometric characteristics in mixed temperate forests by use of airborne laser scanning and ultra-high-resolution imagery. Sci. Total Environ. 2020, 698, 134074. [Google Scholar] [CrossRef]
- Dandois, J.; Olano, M.; Ellis, E. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Schiefer, F.; Kattenborn, T.; Frick, A.; Frey, J.; Schall, P.; Koch, B.; Schmidtlein, S. Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 170, 205–215. [Google Scholar] [CrossRef]
- Liu, J.; Liao, X.; Ni, W.; Wang, Y.; Ye, H.; Yue, H. Individual Tree Recognition Algorithm of UAV Stereo Imagery Considering Three-dimensional Morphology of Tree. J. Geo-Inf. Sci. 2021, 23, 1861–1872. [Google Scholar]
- Selvaraj, M.G.; Vergara, A.; Montenegro, F.; Ruiz, H.A.; Safari, N.; Raymaekers, D.; Ocimatie, W.; Ntamwirac, J.; Titsd, L.; Blomme, G.; et al. Detection of banana plants and their major diseases through aerial images and machine learning methods: A case study in DR Congo and Republic of Benin. ISPRS J. Photogramm. Remote Sens. 2020, 169, 110–124. [Google Scholar] [CrossRef]
- Lin, J.; Wang, M.; Ma, M.; Lin, Y. Aboveground Tree Biomass Estimation of Sparse Subalpine Coniferous Forest with UAV Oblique Photography. Remote Sens. 2018, 10, 1849. [Google Scholar] [CrossRef]
- Zhu, Z.; Huang, M.; Zhou, Z.; Chen, G.; Zhu, X. Stronger conservation promotes mangrove biomass accumulation: Insights from spatially explicit assessments using UAV and Landsat data. Remote Sens. Ecol. Conserv. 2022, 8, 656–669. [Google Scholar] [CrossRef]
- Pu, R. Mapping Tree Species Using Advanced Remote Sensing Technologies: A State-of-the-Art Review and Perspective. J. Remote Sens. 2021, 2021, 9812624. [Google Scholar] [CrossRef]
- Zhang, C.; Atkinson, P.M.; George, C.; Wen, Z.; Diazgranados, M.; Gerard, F. Identifying and mapping individual plants in a highly diverse high-elevation ecosystem using UAV imagery and deep learning. ISPRS J. Photogramm. Remote Sens. 2020, 169, 280–291. [Google Scholar] [CrossRef]
- Huang, H.; Lan, Y.; Yang, A.; Zhang, Y.; Wen, S.; Deng, J. Deep learning versus Object-based Image Analysis (OBIA) in weed mapping of UAV imagery. Int. J. Remote Sens. 2020, 41, 3446–3479. [Google Scholar] [CrossRef]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Yuan, Q.; Shen, H.; Li, T.; Li, Z.; Li, S.; Jiang, Y.; Xu, H.; Tan, W.; Yang, Q.; Wang, J.; et al. Deep learning in environmental remote sensing: Achievements and challenges. Remote Sens. Environ. 2020, 241, 111716. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, J. Unmanned Aerial Vehicle remote sensing in ecology: Advances and prospects. Acta Ecol. Sin. 2018, 38, 20–30. [Google Scholar]
- Zheng, J.; Fu, H.; Li, W.; Wu, W.; Yu, L.; Yuan, S.; Tao, W.Y.W.; Pang, T.K.; Kanniah, K.D. Growing status observation for oil palm trees using Unmanned Aerial Vehicle (UAV) images. ISPRS J. Photogramm. Remote Sens. 2021, 173, 95–121. [Google Scholar] [CrossRef]
- Osco, L.P.; Nogueira, K.; Ramos, A.P.M.; Pinheiro, M.M.F.; Furuya, D.E.G.; Gonçalves, W.N.; Jorge, L.A.D.C.; Junior, J.M.; dos Santos, J.A. Semantic segmentation of citrus-orchard using deep neural networks and multispectral UAV-based imagery. Precis. Agric. 2021, 22, 1171–1188. [Google Scholar] [CrossRef]
- Guo, Q.; Wu, F.; Hu, T.; Chen, L.; Liu, J.; Zhao, X.; Gao, S.; Pang, S. Perspectives and prospects of unmanned aerial vehicle in remote sensing monitoring of biodiversity. Biodivers. Sci. 2016, 24, 1267–1278. [Google Scholar] [CrossRef]
- Zeng, L.; Wardlow, B.D.; Xiang, D.; Hu, S.; Li, D. A review of vegetation phenological metrics extraction using time-series, multispectral satellite data. Remote Sens. Environ. 2020, 237, 111511. [Google Scholar] [CrossRef]
- Wang, S.; Baum, A.; Zarco-Tejada, P.J.; Dam-Hansen, C.; Thorseth, A.; Bauer-Gottwein, P.; Bandini, F.; Garcia, M. Unmanned Aerial System multispectral mapping for low and variable solar irradiance conditions: Potential of tensor decomposition. ISPRS J. Photogramm. Remote Sens. 2019, 155, 58–71. [Google Scholar] [CrossRef]
- Song, B.; Park, K. Detection of Aquatic Plants Using Multispectral UAV Imagery and Vegetation Index. Remote Sens. 2020, 12, 387. [Google Scholar] [CrossRef]
- Grybas, H.; Congalton, R.G. A Comparison of Multi-Temporal RGB and Multispectral UAS Imagery for Tree Species Classification in Heterogeneous New Hampshire Forests. Remote Sens. 2021, 13, 2631. [Google Scholar] [CrossRef]
- Kuzmin, A.; Korhonen, L.; Kivinen, S.; Hurskainen, P.; Korpelainen, P.; Tanhuanpää, T.; Maltamo, M.; Vihervaara, P.; Kumpula, T. Detection of European Aspen (Populus tremula L.) Based on an Unmanned Aerial Vehicle Approach in Boreal Forests. Remote Sens. 2021, 13, 1723. [Google Scholar] [CrossRef]
- Tait, L.; Bind, J.; Charan-Dixon, H.; Hawes, I.; Pirker, J.; Schiel, D. Unmanned Aerial Vehicles (UAVs) for Monitoring Macroalgal Biodiversity: Comparison of RGB and Multispectral Imaging Sensors for Biodiversity Assessments. Remote Sens. 2019, 11, 2332. [Google Scholar] [CrossRef]
- Weisberg, P.J.; Dilts, T.E.; Greenberg, J.A.; Johnson, K.N.; Pai, H.; Sladek, C.; Kratt, C.; Tyler, S.W.; Ready, A. Phenology-based classification of invasive annual grasses to the species level. Remote Sens. Environ. 2021, 263, 112568. [Google Scholar] [CrossRef]
- Liu, P.; Jiang, S.; Zhao, L.; Li, Y.; Zhang, P.; Zhang, L. What are the benefits of strictly protected nature reserves? Rapid assessment of ecosystem service values in Wanglang Nature Reserve, China. Ecosyst. Serv. 2017, 26, 70–78. [Google Scholar] [CrossRef]
- Chen, X.; Wang, X.; Li, J.; Kang, D. Species diversity of primary and secondary forests in Wanglang Nature Reserve. Glob. Ecol. Conserv. 2020, 22, e01022. [Google Scholar] [CrossRef]
- Wang, M.J.; Li, J.Q. Research on habitat restoration of Giant Panda after a grave disturbance of earthquake in Wanglang Nature Reserve, Sichuan Province. Shengtai Xuebao/Acta Ecol. Sin. 2008, 28, 5848–5855. [Google Scholar]
- Fan, F.; Zhao, L.-J.; Ma, T.-Y.; Xiong, X.-Y.; Zhang, Y.-B.; Shen, X.-L.; Shen, L. Community composition and structure in a 25.2 hm2 subalpine dark coniferous forest dynamics plot in Wanglang, Sichuan, China. Chin. J. Plant Ecol. 2022, 46, 1005–1017. [Google Scholar] [CrossRef]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A.R. A review of vegetation indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, A.; Bian, J.; Zhao, W.; Nan, X.; Jin, H.; Tan, J.; Lei, G.; Xia, H.; Yang, Y.; et al. Estimating Aboveground Biomass of Grassland in Zoige by Visible Vegetation Index Derived from Unmanned Aerial Vehicle Image. Remote Sens. Technol. Appl. 2016, 31, 51–62. [Google Scholar]
- Zeng, Y.; Hao, D.; Huete, A.; Dechant, B.; Berry, J.; Chen, J.M.; Joiner, J.; Frankenberg, C.; Ben Bond-Lamberty, B.; Ryu, Y.; et al. Optical vegetation indices for monitoring terrestrial ecosystems globally. Nat. Rev. Earth Environ. 2022, 3, 477–493. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Gao, X.; Huete, A.R.; Ni, W.; Miura, T. Optical–biophysical relationships of vegetation spectra without background contamination. Remote Sens. Environ. 2000, 74, 609–620. [Google Scholar] [CrossRef]
- Ferchichi, A.; Ben Abbes, A.; Barra, V.; Farah, I.R. Forecasting vegetation indices from spatio-temporal remotely sensed data using deep learning-based approaches: A systematic literature review. Ecol. Inf. 2022, 68, 101552. [Google Scholar] [CrossRef]
- Yang, S.Q.; Song, Z.S.; Yin, H.P.; Zhang, Z.T.; Ning, J.F. Crop Classification Method of UVA Multispectral Remote Sensing Based on Deep Semantic Segmentation. Trans. Chin. Soc. Agric. Mach. 2021, 52, 185–192. [Google Scholar]
- Kerkech, M.; Hafiane, A.; Canals, R. Deep leaning approach with colorimetric spaces and vegetation indices for vine diseases detection in UAV images. Comput. Electron. Agric. 2018, 155, 237–243. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Toscano, P.; Gatti, M.; Poni, S.; Berton, A.; Matese, A. Spectral Comparison of UAV-Based Hyper and Multispectral Cameras for Precision Viticulture. Remote Sens. 2022, 14, 449. [Google Scholar] [CrossRef]
- Lu, H.; Fan, T.; Ghimire, P.; Deng, L. Experimental Evaluation and Consistency Comparison of UAV Multispectral Minisensors. Remote Sens. 2020, 12, 2542. [Google Scholar] [CrossRef]
- Lu, B.; He, Y. Species classification using Unmanned Aerial Vehicle (UAV)-acquired high spatial resolution imagery in a heterogeneous grassland. ISPRS J. Photogramm. Remote Sens. 2017, 128, 73–85. [Google Scholar] [CrossRef]
- Carlson, T.N.; Ripley, D.A. On the relation between NDVI, fractional vegetation cover, and leaf area index. Remote Sens. Environ. 1997, 62, 241–252. [Google Scholar] [CrossRef]
- Pettorelli, N.; Vik, J.O.; Mysterud, A.; Gaillard, J.M.; Tucker, C.J.; Stenseth, N.C. Using the satellite-derived NDVI to assess ecological responses to environmental change. Trends Ecol. Evol. 2005, 20, 503–510. [Google Scholar] [CrossRef] [PubMed]
- Sharma, L.K.; Bu, H.; Denton, A.; Franzen, D.W. Active-optical sensors using red NDVI compared to red edge NDVI for prediction of corn grain yield in North Dakota, USA. Sensors 2015, 15, 27832–27853. [Google Scholar] [CrossRef]
- Eitel, J.U.; Vierling, L.A.; Litvak, M.E.; Long, D.S.; Schulthess, U.; Ager, A.A.; Krofcheck, D.J.; Stoscheck, L. Broadband, red-edge information from satellites improves early stress detection in a New Mexico conifer woodland. Remote Sens. Environ. 2011, 115, 3640–3646. [Google Scholar] [CrossRef]
- Mangewa, L.J.; Ndakidemi, P.A.; Alward, R.D.; Kija, H.K.; Bukombe, J.K.; Nasolwa, E.R.; Munishi, L.K. Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area, Tanzania. Earth 2022, 3, 769–787. [Google Scholar] [CrossRef]
- Jannoura, R.; Brinkmann, K.; Uteau, D.; Bruns, C.; Joergensen, R.G. Monitoring of crop biomass using true colour aerial photographs taken from a remote controlled hexacopter. Biosyst. Eng. 2015, 129, 341–351. [Google Scholar] [CrossRef]
- Lussem, U.; Bolten, A.; Gnyp, M.L.; Jasper, J.; Bareth, G. Evaluation of RGB-based vegetation indices from UAV imagery to estimate forage yield in grassland. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1215. [Google Scholar] [CrossRef]
- Xu, F.; Gao, Z.; Jiang, X.; Shang, W.; Ning, J.; Song, D.; Ai, J. A UAV and S2A data-based estimation of the initial biomass of green algae in the South Yellow Sea. Mar. Pollut. Bull. 2018, 128, 408–414. [Google Scholar] [CrossRef]
- Wang, X.; Wang, M.; Wang, S.; Wu, Y. Extraction of vegetation information from visible unmanned aerial vehicle images. Trans. Chin. Soc. Agric. Eng. 2015, 31, 152–159. [Google Scholar]
- Zhou, H.; Fu, L.; Sharma, R.P.; Lei, Y.; Guo, J. A hybrid approach of combining random forest with texture analysis and VDVI for desert vegetation mapping Based on UAV RGB Data. Remote Sens. 2021, 13, 1891. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. In Proceedings of the Third Earth Resources Technology Satellite—1 Symposium, Washington, DC, USA, 10–14 December 1973; NASA SP-351. pp. 309–317. [Google Scholar]
- Rouse, J.W., Jr.; Haas, R.H.; Deering, D.W.; Schell, J.A.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; NASA: Greenbelt, MD, USA, 1974. [Google Scholar]
- Gitelson, A.; Merzlyak, M.N. Spectral reflectance changes associated with autumn senescence of Aesculus hippocastanum L. and Acer platanoides L. leaves. Spectral features and relation to chlorophyll estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; Mcmurtrey, J.E.; Walthall, C.L. Evaluation of Digital Photography from Model Aircraft for Remote Sensing of Crop Biomass and Nitrogen Status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Klosterman, S.; Melaas, E.; Wang, J.A.; Martinez, A.; Frederick, S.; O’Keefe, J.; Orwig, D.A.; Wang, Z.; Sun, Q.; Schaaf, C.; et al. Fine-scale perspectives on landscape phenology from unmanned aerial vehicle (UAV) photography. Agric. For. Meteorol. 2018, 248, 397–407. [Google Scholar] [CrossRef]
- Onishi, M.; Ise, T. Explainable identification and mapping of trees using UAV RGB image and deep learning. Sci. Rep. 2021, 11, 903. [Google Scholar] [CrossRef]
- Liu, H. Classification of urban tree species using multi-features derived from four-season RedEdge-MX data. Comput. Electron. Agric. 2022, 194, 106794. [Google Scholar] [CrossRef]
- Zhang, C.; Xia, K.; Feng, H.; Yang, Y.; Du, X. Tree species classification using deep learning and RGB optical images obtained by an unmanned aerial vehicle. J. For. Res. 2020, 32, 1879–1888. [Google Scholar] [CrossRef]
- Qin, H.; Zhou, W.; Yao, Y.; Wang, W. Individual tree segmentation and tree species classification in subtropical broadleaf forests using UAV-based LiDAR, hyperspectral, and ultrahigh-resolution RGB data. Remote Sens. Environ. 2022, 280, 113143. [Google Scholar] [CrossRef]
- Tehrany, M.S.; Kumar, L.; Drielsma, M.J. Review of native vegetation condition assessment concepts, methods and future trends. J. Nat. Conserv. 2017, 40, 12–23. [Google Scholar] [CrossRef]
- Hernandez-Santin, L.; Rudge, M.L.; Bartolo, R.E.; Erskine, P.D. Identifying Species and Monitoring Understorey from UAS-Derived Data: A Literature Review and Future Directions. Drones 2019, 3, 9. [Google Scholar] [CrossRef]
- Lisein, J.; Michez, A.; Claessens, H.; Lejeune, P. Discrimination of Deciduous Tree Species from Time Series of Unmanned Aerial System Imagery. PLoS ONE 2015, 10, e0141006. [Google Scholar] [CrossRef]
- Ahmed, O.S.; Shemrock, A.; Chabot, D.; Dillon, C.; Williams, G.; Wasson, R.; Franklin, S.E. Hierarchical land cover and vegetation classification using multispectral data acquired from an unmanned aerial vehicle. Int. J. Remote Sens. 2017, 38, 2037–2052. [Google Scholar] [CrossRef]
- Jeong, S.-J.; Ho, C.-H.; Gim, H.-J.; Brown, M.E. Phenology shifts at start vs. end of growing season in temperate vegetation over the Northern Hemisphere for the period 1982–2008. Glob. Chang. Biol. 2011, 17, 2385–2399. [Google Scholar] [CrossRef]
- Egli, S.; Höpke, M. CNN-Based Tree Species Classification Using High Resolution RGB Image Data from Automated UAV Observations. Remote Sens. 2020, 12, 3892. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Han, J.; Yu, J.; Huang, K. A near real-time deep learning approach for detecting rice phenology based on UAV images. Agric. For. Meteorol. 2020, 287, 107938. [Google Scholar] [CrossRef]
- Chen, J.; Wang, S.; Li, Y.; Wang, H.; Yang, F.; Ju, W.; Zhang, Q.; Liang, C. Diurnal changes in chlorophyll fluorescence parameters and their relationships with vegetation productivity in subtropical coniferous plantations. Acta Ecol. Sin. 2019, 39, 5603–5615. [Google Scholar]










| Image Acquisition Equipment | DJI P4M |
|---|---|
| Image sensor | 1/2.9-inch CMOS |
| Blue bands | 450 ± 16 nm |
| Green bands | 560 ± 16 nm |
| Red bands | 650 ± 16 nm |
| Red edge band | 730 ± 16 nm |
| Near-infrared band | 840 ± 26 nm |
| Acquisition Mode | Snapshot |
| Optics | f/2.2 |
| FOV | 62.7° |
| Flight Date | Flight Time | Flight Height | Total Images | Spatial Resolution (m) | Flight Area (ha) |
|---|---|---|---|---|---|
| April 21 | 14:23 | 500 m | 223 × 6 | 0.21 | 194.24 |
| May 23 | 14:31 | 300 m | 121 × 6 | 0.13 | 40.08 |
| June 17 | 13:07 | 400 m | 145 × 6 | 0.17 | 101.80 |
| August 27 | 16:07 | 400 m | 145 × 6 | 0.17 | 99.19 |
| September 27 | 16:51 | 400 m | 145 × 6 | 0.17 | 99.04 |
| October 27 | 14:17 | 400 m | 145 × 6 | 0.17 | 94.47 |
| Month | April 21 | May 23 | June 17 | August 27 | September 27 | October 27 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Input Data | MS | RGB | MS | RGB | MS | RGB | MS | RGB | MS | RGB | MS | RGB |
| Precision | 90.45% | 91.24% | 89.77% | 88.21% | 89.82% | 87.75% | 90.06% | 88.27% | 91.04% | 90.40% | 90.06% | 90.68% |
| Recall | 90.24% | 90.87% | 91.20% | 90.06% | 89.38% | 86.08% | 89.85% | 87.70% | 91.25% | 90.65% | 89.63% | 90.35% |
| F1 | 90.34% | 91.06% | 90.48% | 89.12% | 89.60% | 86.91% | 89.95% | 87.98% | 91.15% | 90.52% | 89.84% | 90.52% |
| IoU | 82.50% | 83.72% | 82.56% | 80.21% | 82.31% | 76.81% | 81.69% | 78.52% | 84.82% | 82.66% | 81.56% | 82.67% |
| Month | April 21 | May 23 | June 17 | August 27 | September 27 | October 27 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Input Data | MS_VI | RGB_VI | MS_VI | RGB_VI | MS_VI | RGB_VI | MS_VI | RGB_VI | MS_VI | RGB_VI | MS_VI | RGB_VI |
| Precision | 90.26% | 91.33% | 90.02% | 89.50% | 89.61% | 88.95% | 89.78% | 89.43% | 91.09% | 90.50% | 90.13% | 90.54% |
| Recall | 90.32% | 91.50% | 91.55% | 91.10% | 89.86% | 87.32% | 89.39% | 88.33% | 91.02% | 90.29% | 89.84% | 90.00% |
| F1 | 90.29% | 91.41% | 90.78% | 90.29% | 89.73% | 88.13% | 89.59% | 88.88% | 91.05% | 90.40% | 89.99% | 90.27% |
| IoU | 82.36% | 84.33% | 83.06% | 82.16% | 81.27% | 78.61% | 81.11% | 79.93% | 83.57% | 82.37% | 81.79% | 82.24% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, W.; Liao, X.; Sun, J.; Zhang, Z.; Wang, D.; Wang, S.; Qu, W.; He, H.; Ye, H.; Yue, H.; et al. Optimizing Observation Plans for Identifying Faxon Fir (Abies fargesii var. Faxoniana) Using Monthly Unmanned Aerial Vehicle Imagery. Remote Sens. 2023, 15, 2205. https://doi.org/10.3390/rs15082205
Shi W, Liao X, Sun J, Zhang Z, Wang D, Wang S, Qu W, He H, Ye H, Yue H, et al. Optimizing Observation Plans for Identifying Faxon Fir (Abies fargesii var. Faxoniana) Using Monthly Unmanned Aerial Vehicle Imagery. Remote Sensing. 2023; 15(8):2205. https://doi.org/10.3390/rs15082205
Chicago/Turabian StyleShi, Weibo, Xiaohan Liao, Jia Sun, Zhengjian Zhang, Dongliang Wang, Shaoqiang Wang, Wenqiu Qu, Hongbo He, Huping Ye, Huanyin Yue, and et al. 2023. "Optimizing Observation Plans for Identifying Faxon Fir (Abies fargesii var. Faxoniana) Using Monthly Unmanned Aerial Vehicle Imagery" Remote Sensing 15, no. 8: 2205. https://doi.org/10.3390/rs15082205
APA StyleShi, W., Liao, X., Sun, J., Zhang, Z., Wang, D., Wang, S., Qu, W., He, H., Ye, H., Yue, H., & Tagesson, T. (2023). Optimizing Observation Plans for Identifying Faxon Fir (Abies fargesii var. Faxoniana) Using Monthly Unmanned Aerial Vehicle Imagery. Remote Sensing, 15(8), 2205. https://doi.org/10.3390/rs15082205