
Infrared Cirrus Detection Using Non-Convex Rank Surrogates for Spatial-Temporal Tensor


Abstract
:1. Introduction
- Considering the infrared imaging characteristics of cirrus scenes, a spatial-temporal tensor (STT) model was built, so that a low-rank sparse decomposition method could be effectively used in an infrared cirrus detection scheme;
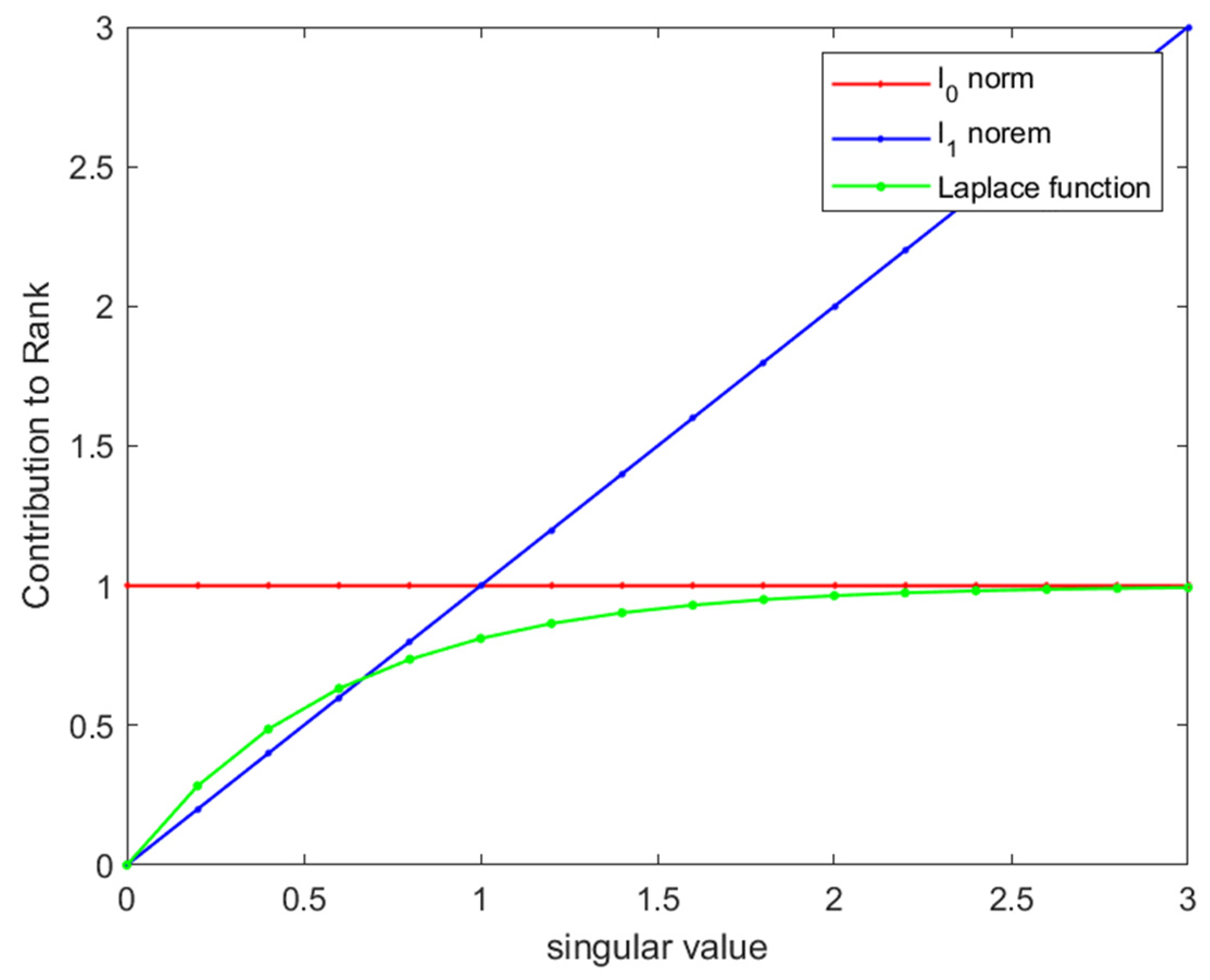
- To obtain an easy-to-calculate tensor rank, the NRSs using the Laplace function are applied to the STT (Lap-NRSSTT) completion for infrared imagery; It preserves the details of the cirrus and suppresses noise with smaller singular values;
- To reduce the time complexity, a mask based on visual saliency is constructed, so that the optimization-based scheme can quickly reach the convergence stop condition with great detection performance.
2. Materials and Methods
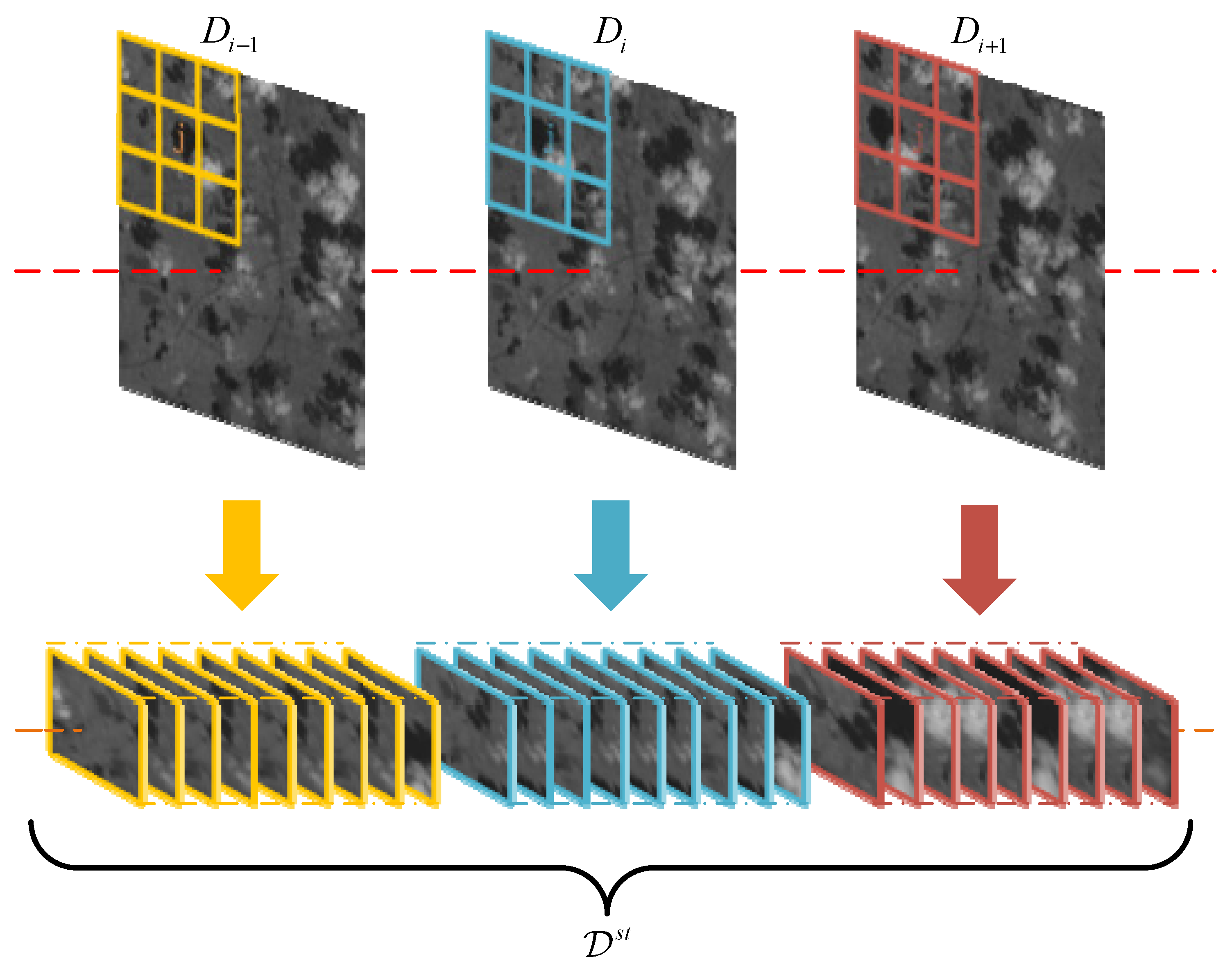
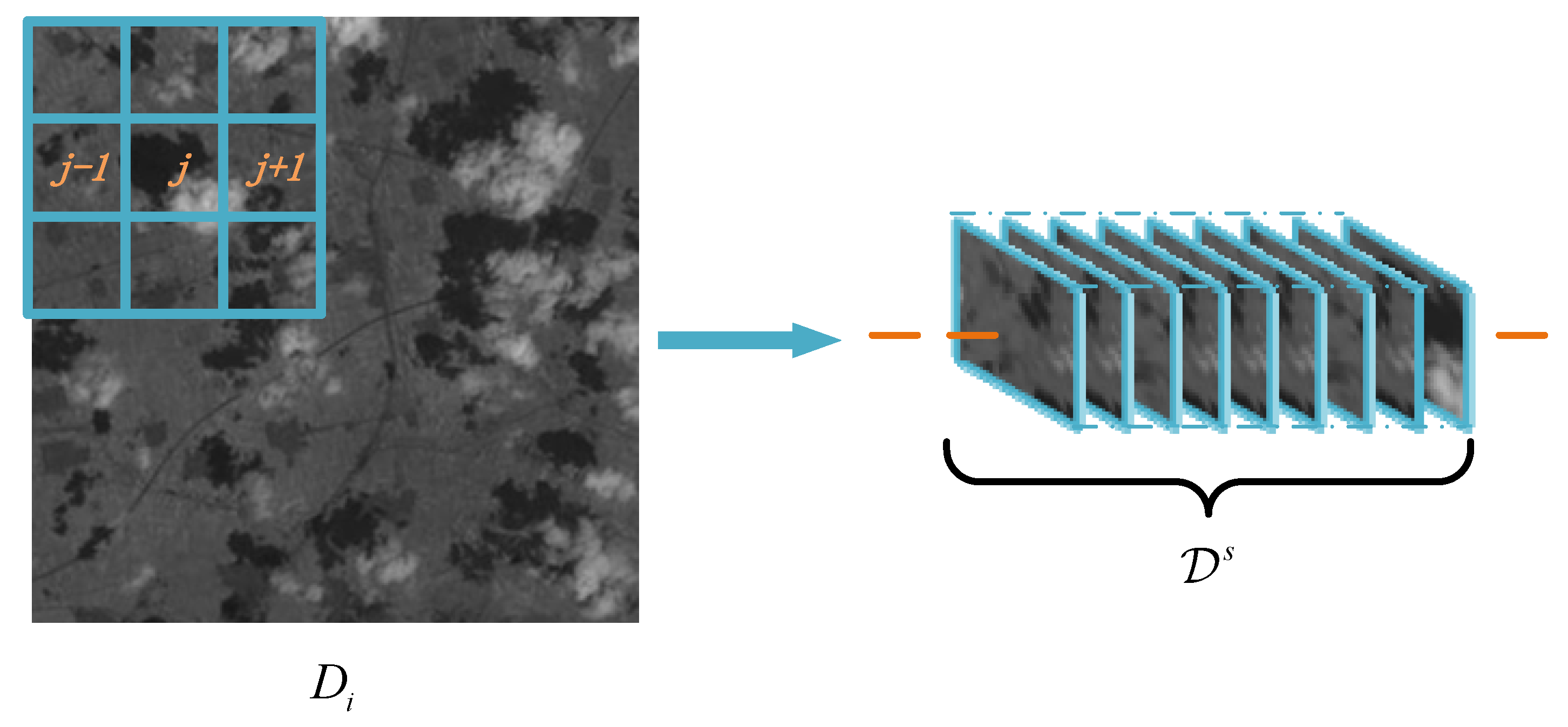
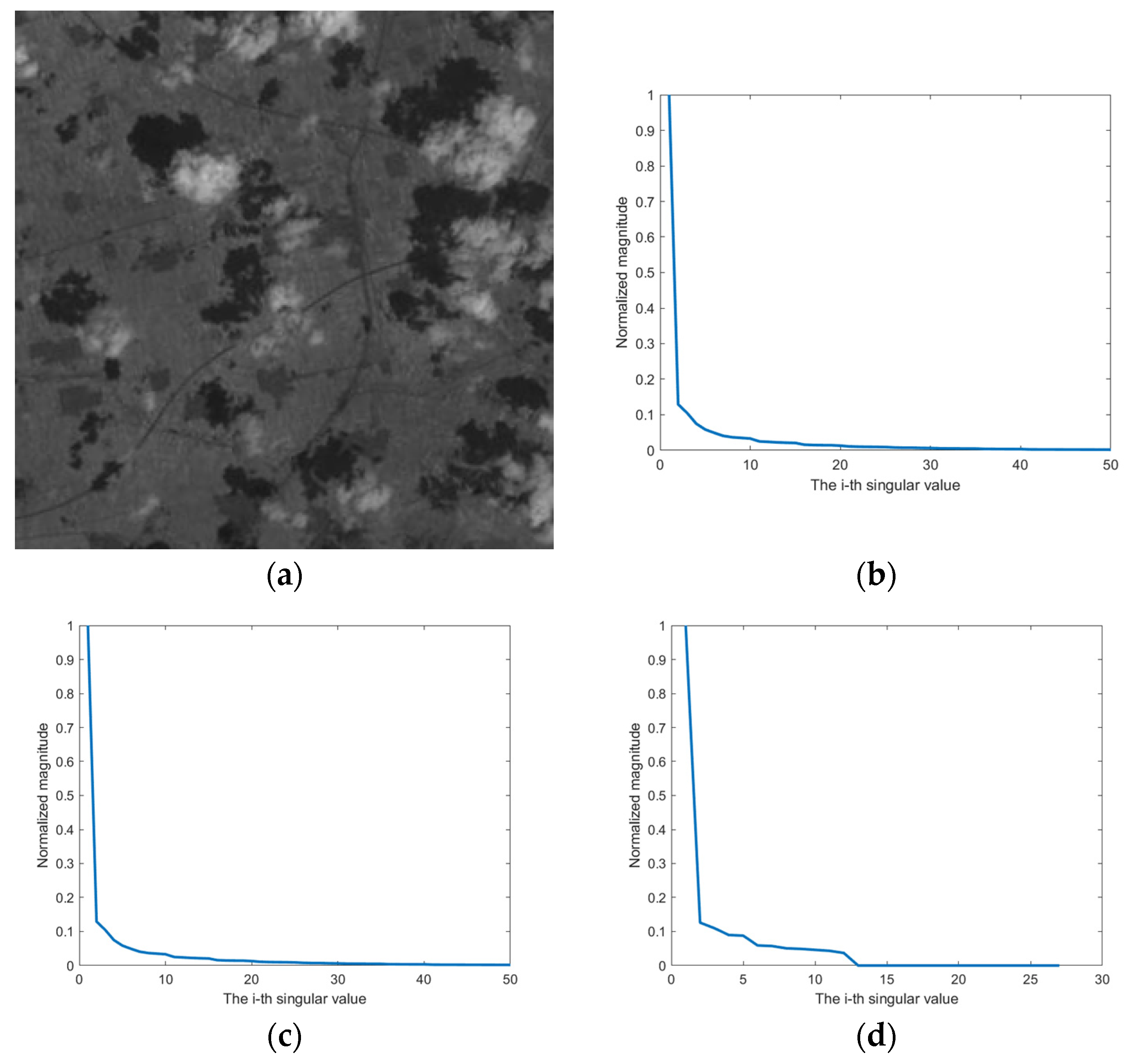
2.1. Construction of STT Model
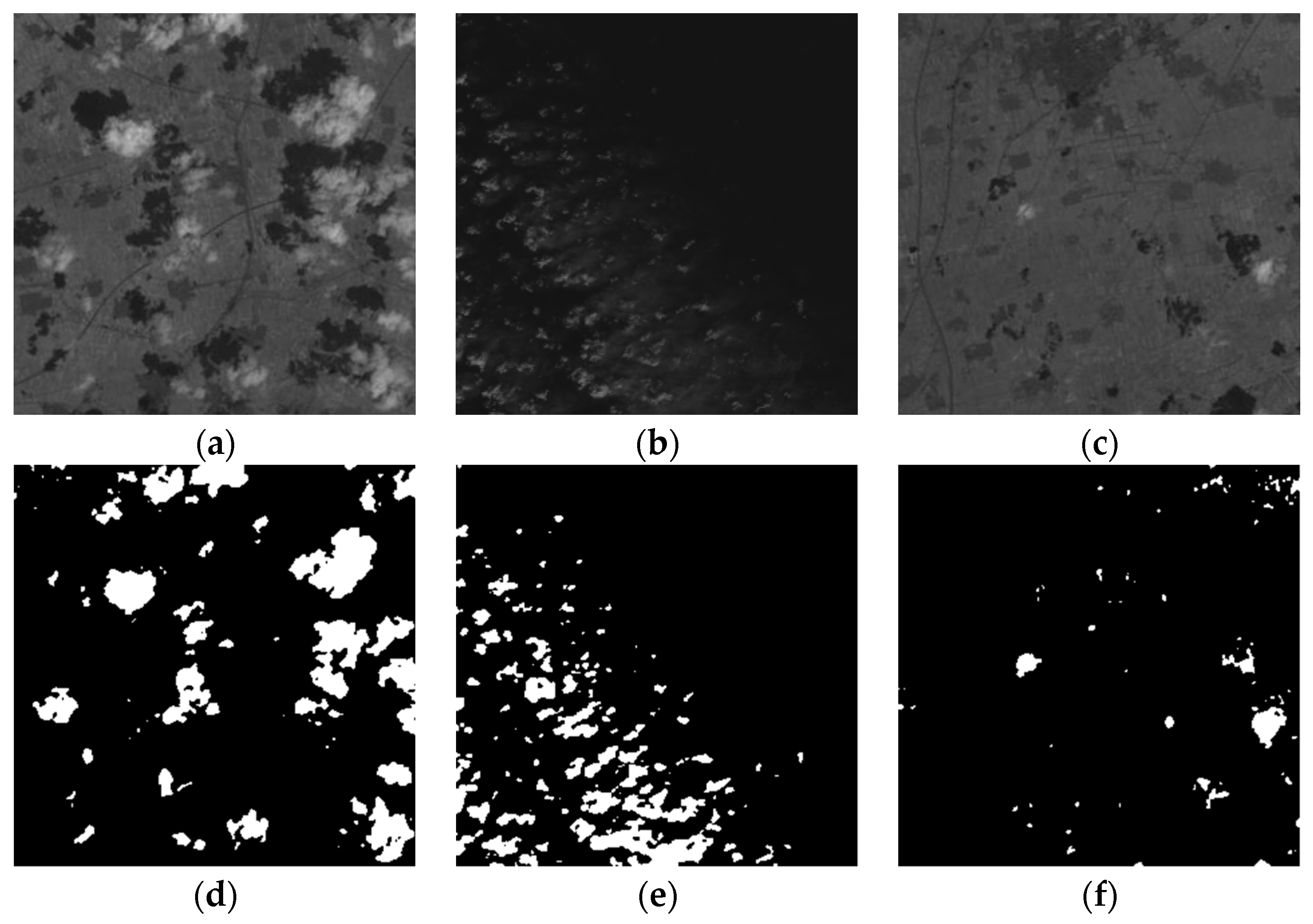
2.2. Visual Saliency Mask
2.3. Non-Convex Surrogate of Tensor Rank
| Algorithm 1 Specific steps of the ADMM framework |
| Input: , ; Process: 1: Computer ; 2: for do ; 3: Update via (12); 4: Update via (13); 5: end for; 6: for do ; 7: end for; 8: Compute . |
2.4. Solution of Lap-NRSSTT Mode
| Algorithm 2 ADMM for solving the proposed model. |
| Input: , , ; Initialize: , 0, , ; While not converge do 1: Update by Algorithm 1; 2: Update by (19); 3: Update by (21); 4: Update by (22); 5: Check the convergence conditions or ; 6: Update k: ; 7: Output: , . |
2.5. Steps of the Method
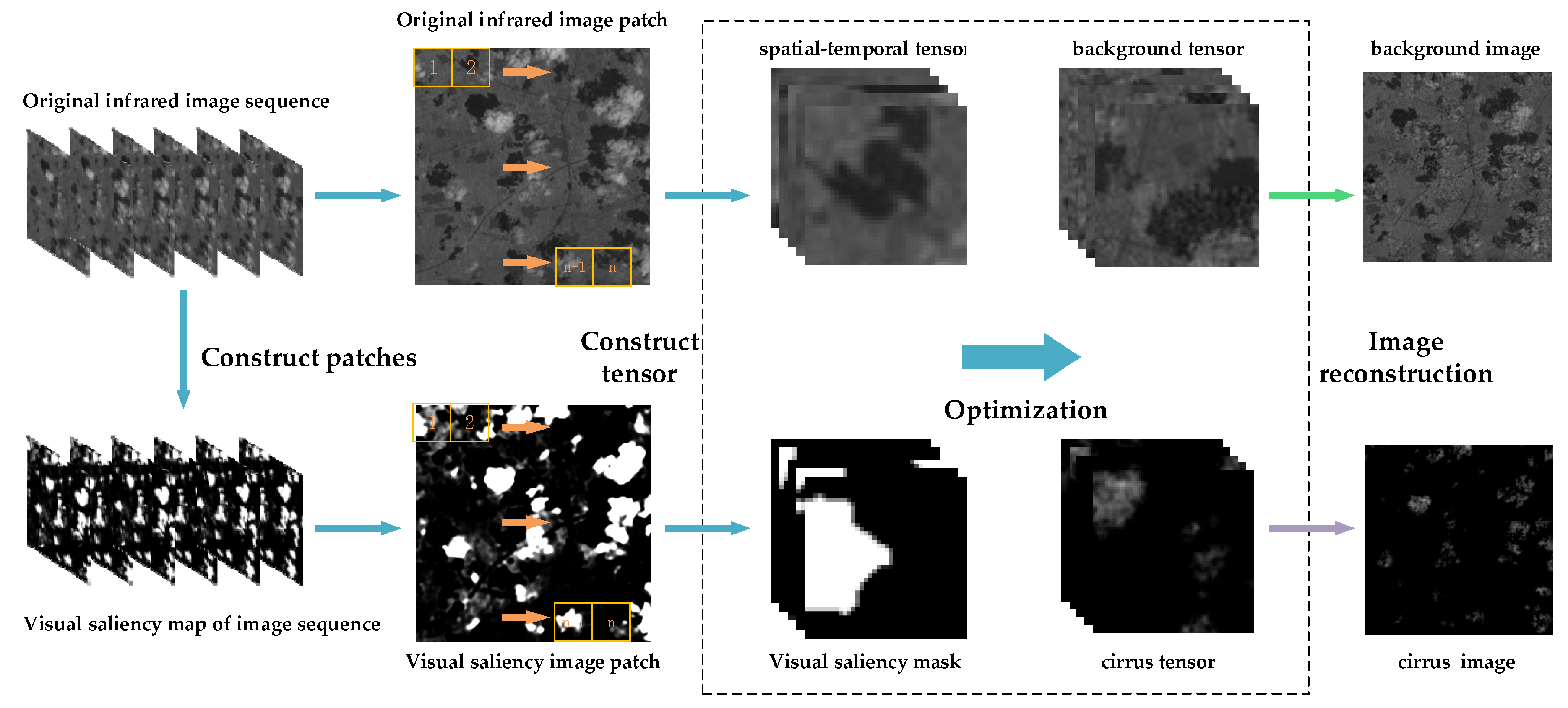
- Inputting the image. Given the current frame and its adjacent frames . Each frame of the image traversed the whole image through a sliding window of size to obtain an image patch;
- Construction of the STT model. For each image of , an STT was constructed according to the proposed model, where ;
- Using visual saliency to separate cloudy areas and cloudless areas. For each frontal slice of the input STT , the visual saliency was calculated respectively, and STT and containing the prior information of the cirrus is obtained;
- Separate background and cirrus. Taking STT as the input tensor, was decomposed into background patch tensor and cirrus patch tensor by Algorithm 2;
- Image reconstruction and cirrus detection. The obtained background patch tensor and cirrus patch tensor were reconstructed to obtain the background image and the cirrus image . Then the detection result was obtained by one or more set threshold segmentation.
3. Experimental Results and Analysis
3.1. Experimental Preparations
3.2. Evaluation Metrics
3.3. Parameter Analysis
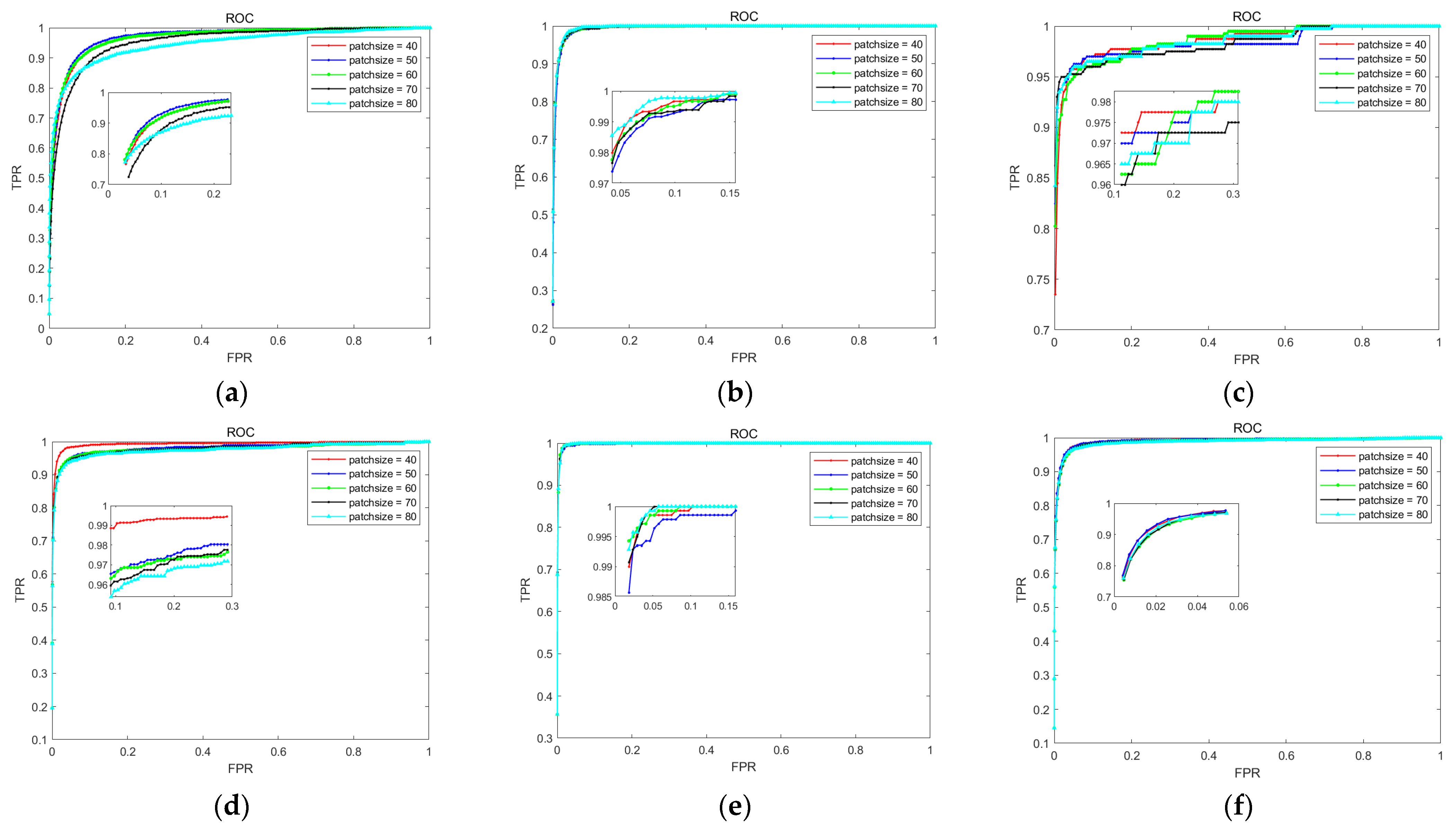
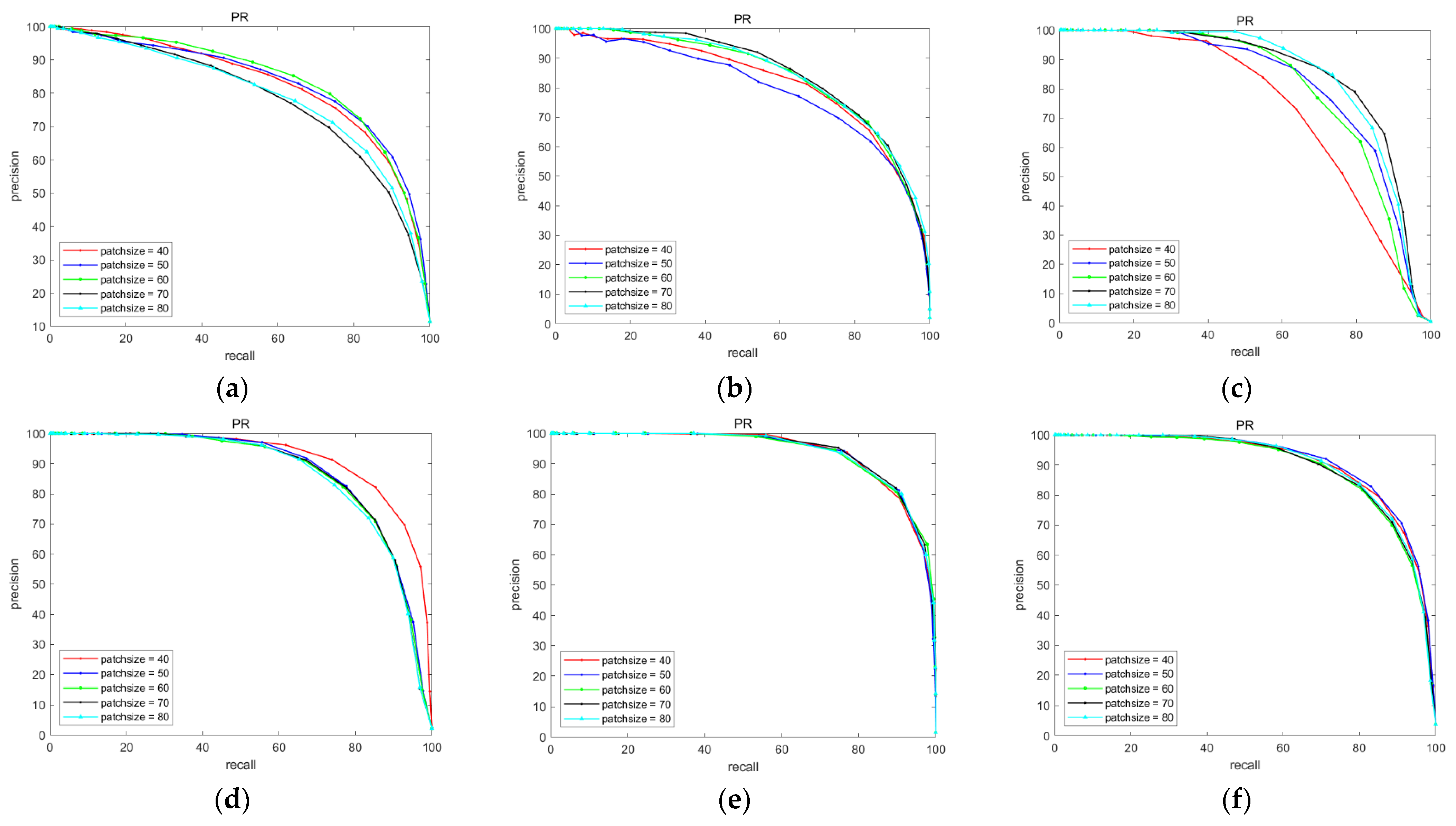
3.3.1. Patch Size
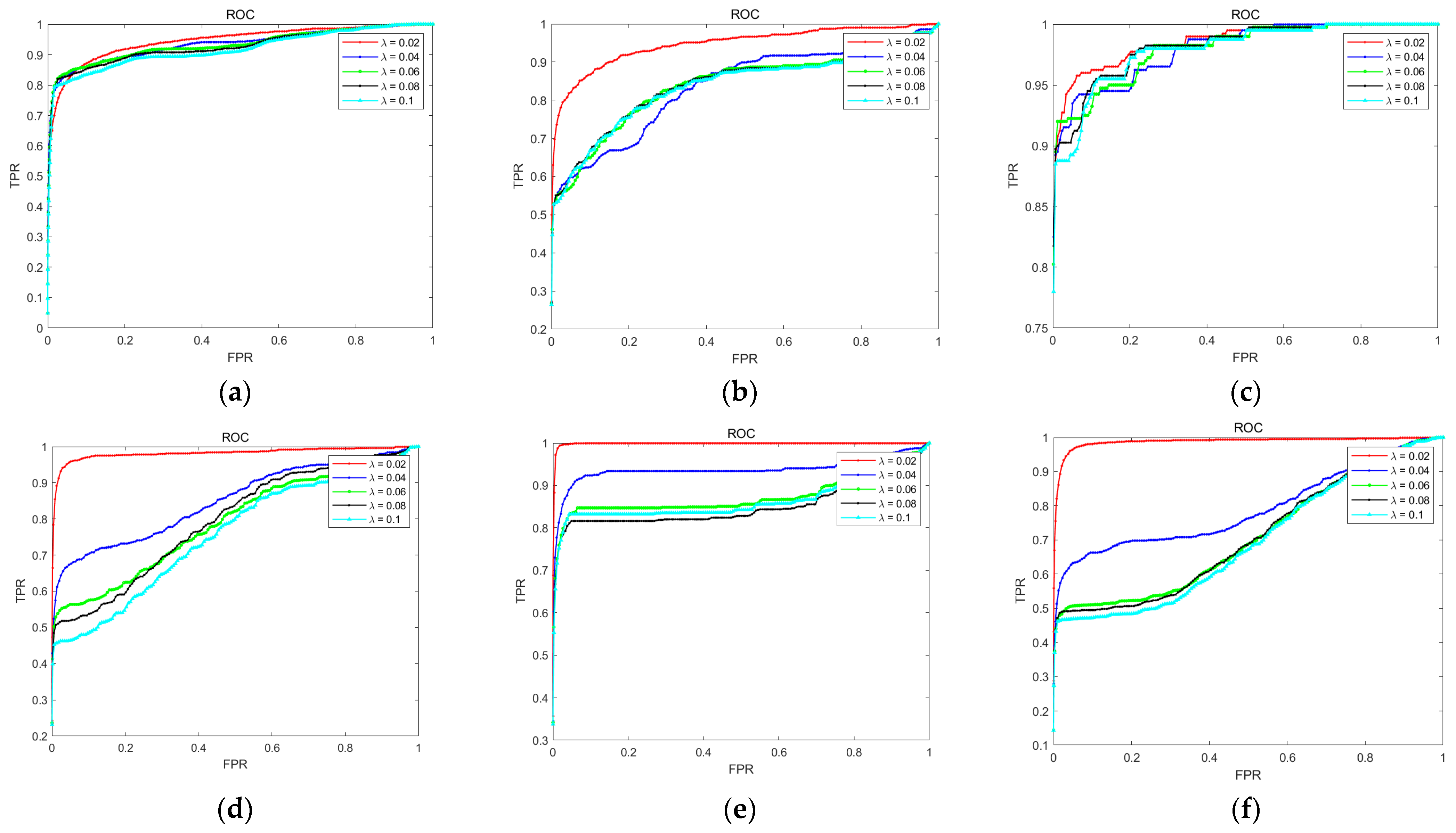
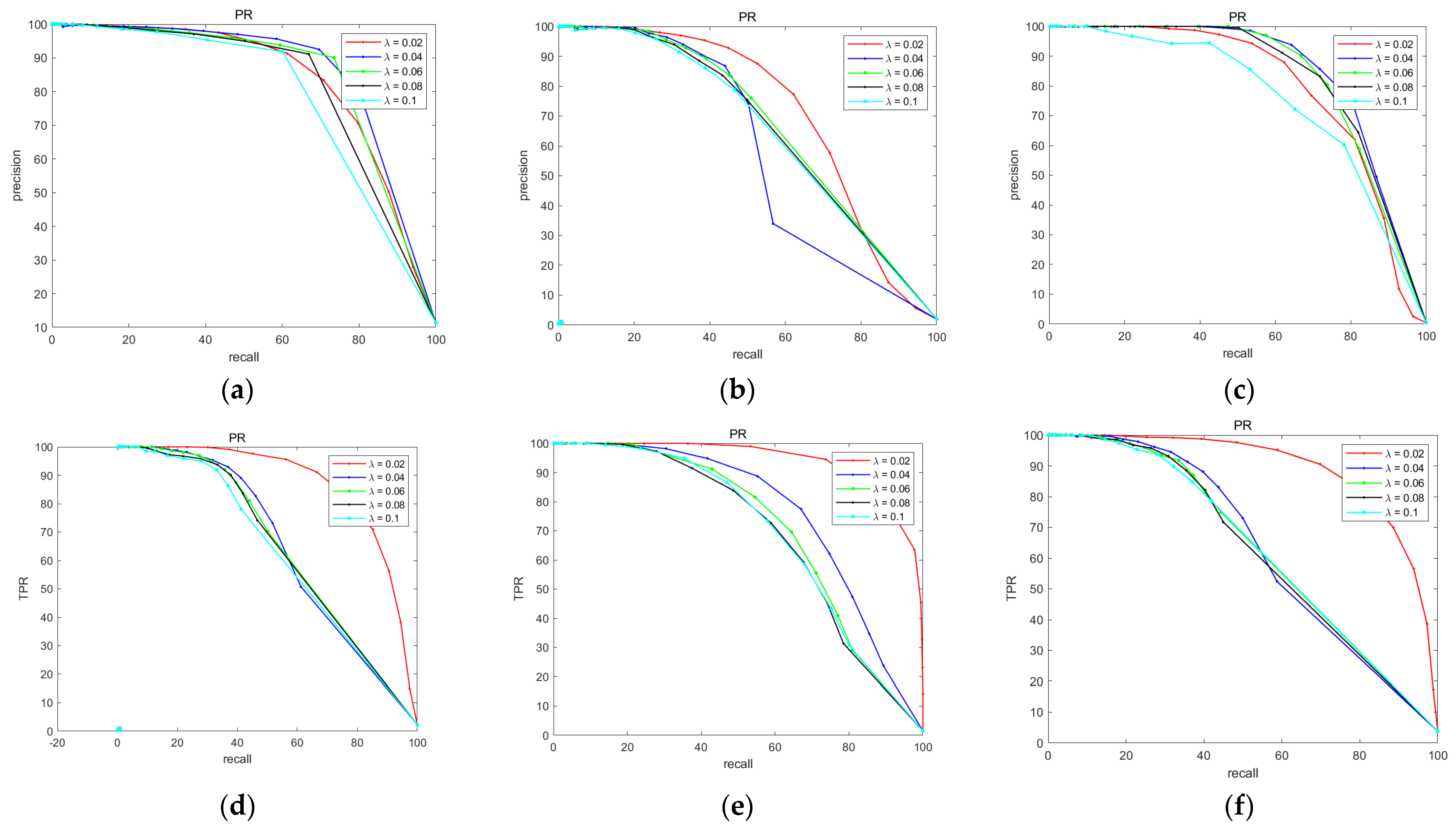
3.3.2. Regularization Parameter
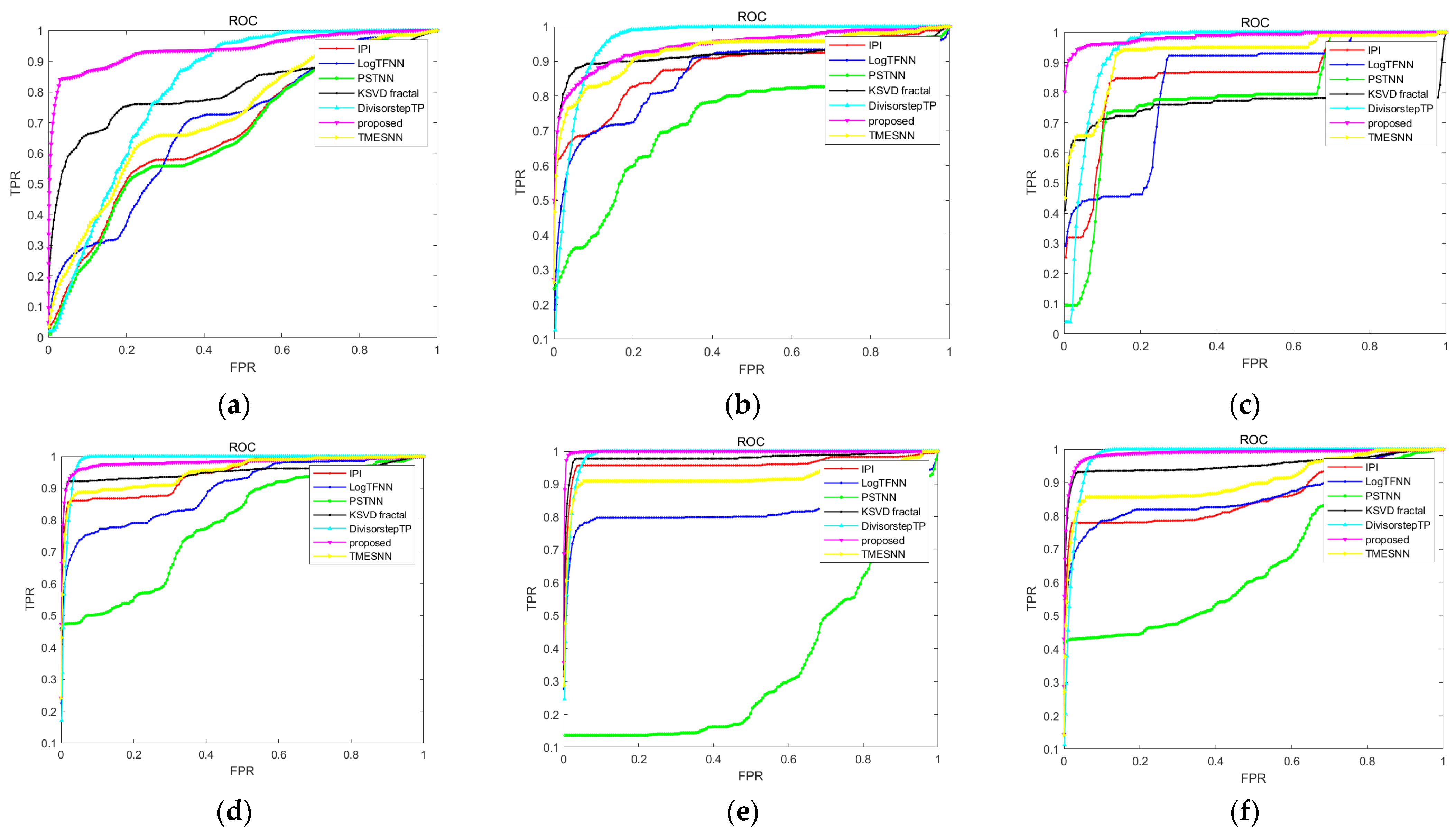
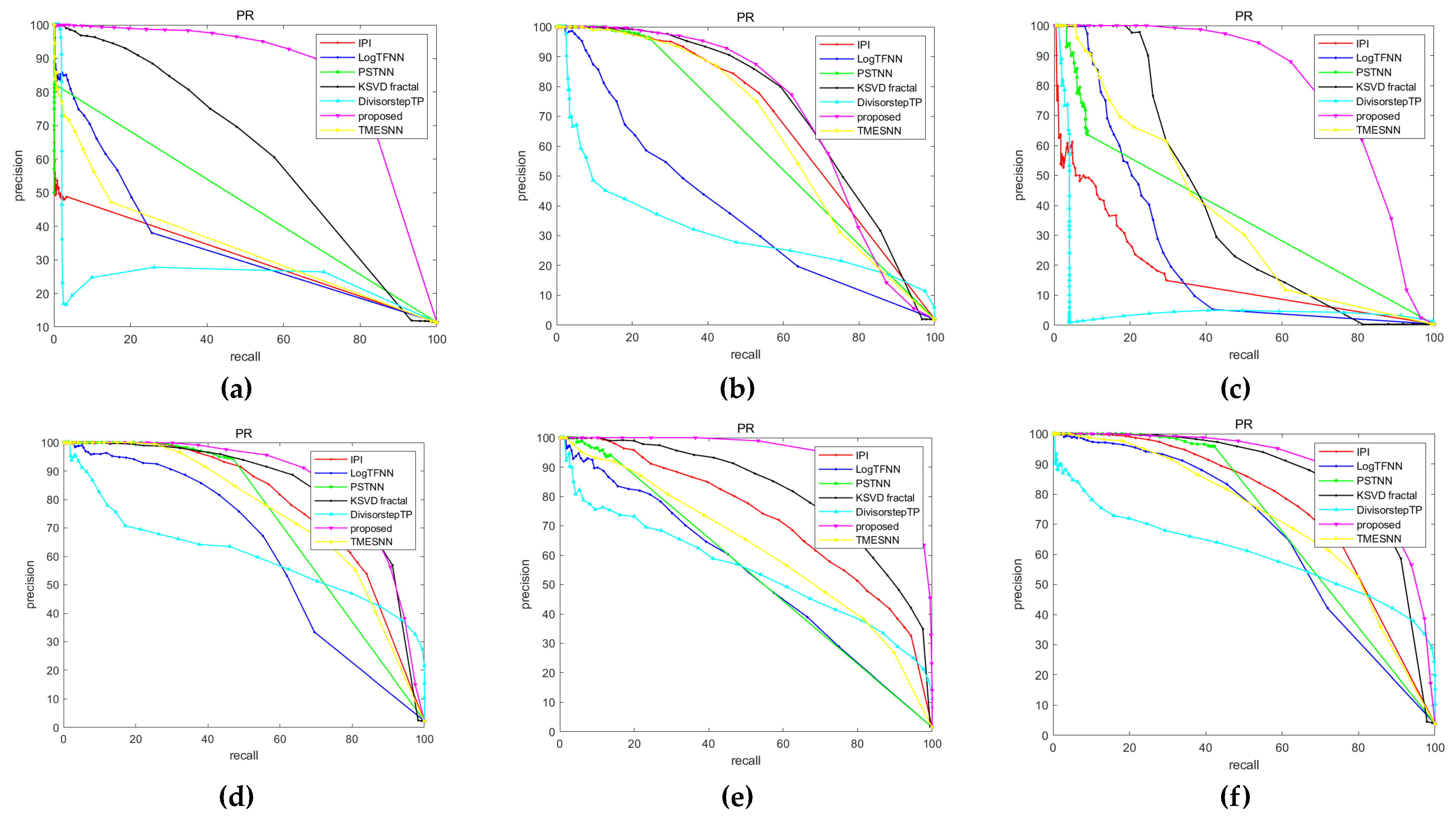
3.4. Method Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, S.; Liu, Y.; He, Y.; Zhang, T.; Peng, Z. Structure-Adaptive Clutter Suppression for Infrared Small Target Detection: Chain-Growth Filtering. Remote Sens. 2020, 12, 47. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, R.; Lin, Y.; Xu, S. Application in the military of the IR detection technology. Infrared Laser Eng. 2008, 37, 570–574. [Google Scholar]
- Liu, X.; Chen, Y.; Peng, Z.; Wu, J.; Wang, Z. Infrared image super-resolution reconstruction based on quaternion fractional order total variation with Lp quasinorm. Appl. Sci. 2018, 8, 1864. [Google Scholar] [CrossRef]
- Huang, S.; Peng, Z.; Wang, Z.; Wang, X.; Li, M. Infrared Small Target Detection by Density Peaks Searching and Maximum-Gray Region Growing. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1919–1923. [Google Scholar] [CrossRef]
- Hou, W.; Sun, X.; Shang, Y.; Yu, Q. Present State and Perspectives of Small Infrared Targets Detection Technology. Infrared Technol. 2015, 37, 1–10. [Google Scholar]
- Zhang, L.; Peng, Z. Infrared Small Target Detection Based on Partial Sum of the Tensor Nuclear Norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef]
- Zhang, T.; Wu, H.; Liu, Y.; Peng, L.; Yang, C.; Peng, Z. Infrared Small Target Detection Based on Non-Convex Optimization with Lp-Norm Constraint. Remote Sens. 2019, 11, 559. [Google Scholar] [CrossRef]
- Wang, X.; Peng, Z.; Kong, D.; He, Y. Infrared Dim and Small Target Detection Based on Stable Multisubspace Learning in Heterogeneous Scene. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5481–5493. [Google Scholar] [CrossRef]
- Wang, X.; Peng, Z.; Zhang, P.; He, Y. Infrared Small Target Detection via Nonnegativity-Constrained Variational Mode Decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1700–1704. [Google Scholar] [CrossRef]
- Wang, X.; Peng, Z.; Kong, D.; Zhang, P.; He, Y. Infrared dim target detection based on total variation regularization and principal component pursuit. Image Vis. Comput. 2017, 63, 1–9. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared Small Target Detection via Non-Convex Rank Approximation Minimization Joint l2,1 Norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef]
- Zhang, T.; Li, L.; Cao, S.; Pu, T.; Peng, Z. Attention-Guided Pyramid Context Networks for Detecting Infrared Small Target Under Complex Background. IEEE Trans. Aerosp. Electron. Syst. 2023, 1–13. [Google Scholar] [CrossRef]
- Han, Y.; Liao, J.; Lu, T.; Pu, T.; Peng, Z. KCPNet: Knowledge-Driven Context Perception Networks for Ship Detection in Infrared Imagery. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–19. [Google Scholar] [CrossRef]
- Allen, R.C.; Durkee, P.A.; Wash, C.H. Snow/Cloud Discrimination with Multispectral Satellite Measurements. J. Appl. Meteorol. Climatol. 1990, 29, 994–1004. [Google Scholar] [CrossRef]
- Inoue, T. A cloud type classification with NOAA 7 split-window measurements. J. Geophys. Res. Atmos. 1987, 92, 3991–4000. [Google Scholar] [CrossRef]
- Smith, W.L.; Revercomb, H.E.; Howell, H.B.; Lin, M.X. Multi-Spectral Window Radiance Observations of Cirrus from Satellite and Aircraft, November 2, 1986 Project FIRE; NASA: Washington, DC, USA, 1990. [Google Scholar]
- Wind, G.; Platnick, S.; King, M.D.; Hubanks, P.A.; Pavolonis, M.J.; Heidinger, A.K.; Yang, P.; Baum, B.A. Multilayer Cloud Detection with the MODIS Near-Infrared Water Vapor Absorption Band. J. Appl. Meteorol. Climatol. 2010, 49, 2315–2333. [Google Scholar] [CrossRef]
- Rossow, W.B.; Mosher, F.; Kinsella, E.; Arking, A.; Desbois, M.; Harrison, E.; Minnis, P.; Ruprecht, E.; Seze, G.; Simmer, C.; et al. ISCCP Cloud Algorithm Intercomparison. J. Appl. Meteorol. Climatol. 1985, 24, 877–903. [Google Scholar] [CrossRef]
- Goodman, A.H.; Henderson-Sellers, A. Cloud detection and analysis: A review of recent progress. Atmos. Res. 1988, 21, 203–228. [Google Scholar] [CrossRef]
- Rossow, W.B. Measuring Cloud Properties from Space: A Review. J. Clim. 1989, 2, 201–213. [Google Scholar] [CrossRef]
- Liu, X.; Ping, S.J.; Huang, Y.J. Cloud automatic detection in high-resolution satellite images based on morphological features. In Proceedings of the Eleventh International Conference on Graphics and Image Processing, Hangzhou, China, 3–6 July 2020; p. 113730. [Google Scholar]
- Hollstein, A.; Segl, K.; Guanter, L.; Brell, M.; Enesco, M. Ready-to-Use Methods for the Detection of Clouds, Cirrus, Snow, Shadow, Water and Clear Sky Pixels in Sentinel-2 MSI Images. Remote Sens. 2016, 8, 666. [Google Scholar] [CrossRef]
- Kang, X.; Gao, G.; Hao, Q.; Li, S. A Coarse-to-Fine Method for Cloud Detection in Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2019, 16, 110–114. [Google Scholar] [CrossRef]
- Gao, B.C.; Li, R.R. Removal of Thin Cirrus Scattering Effects in Landsat 8 OLI Images Using the Cirrus Detecting Channel. Remote Sens. 2017, 9, 834. [Google Scholar] [CrossRef]
- Zheng, Y.; Ling, W.; Shifei, T. A Lightweight Network for Remote Sensing Image Cloud Detection. In Proceedings of the 2022 IEEE 4th International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 29–31 July 2022; pp. 644–649. [Google Scholar]
- Tang, X.; Yao, J.; Chen, J.; Li, G.; Zhang, W. Multimodel Fusion Method for Cloud Detection in Satellite Laser Footprint Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Luo, C.; Feng, S.; Yang, X.; Ye, Y.; Li, X.; Zhang, B.; Chen, Z.; Quan, Y. LWCDnet: A Lightweight Network for Efficient Cloud Detection in Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Lyu, Y.; Peng, L.; Pu, T.; Yang, C.; Wang, J.; Peng, Z. Cirrus Detection Based on RPCA and Fractal Dictionary Learning in Infrared imagery. Remote Sens. 2020, 12, 142. [Google Scholar] [CrossRef]
- Yang, C.; Kong, X.; Cao, Z.; Peng, Z. Cirrus Detection Based on Tensor Multi-Mode Expansion Sum Nuclear Norm in Infrared Imagery. IEEE Access 2020, 8, 149963–149983. [Google Scholar] [CrossRef]
- Kong, X.; Yang, C.; Cao, S.; Li, C.; Peng, Z. Infrared Small Target Detection via Non-Convex Tensor Fibered Rank Approximation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–21. [Google Scholar] [CrossRef]
- Wang, G.; Tao, B.; Kong, X.; Peng, Z. Infrared Small Target Detection Using Non-Overlapping Patch Spatial–Temporal Tensor Factorization With Capped Nuclear Norm Regularization. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Yi, H.; Yang, C.; Qie, R.; Liao, J.; Wu, F.; Pu, T.; Peng, Z. Spatial-Temporal Tensor Ring Norm Regularization for Infrared Small Target Detection. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Liu, H.K.; Zhang, L.; Huang, H. Small Target Detection in Infrared Videos Based on Spatio-Temporal Tensor Model. IEEE Geosci. Remote Sens. Lett. 2020, 58, 8689–8700. [Google Scholar] [CrossRef]
- Cao, Z.; Kong, X.; Zhu, Q.; Cao, S.; Peng, Z. Infrared dim target detection via mode-k1k2 extension tensor tubal rank under complex ocean environment. ISPRS J. Photogramm. Remote Sens. 2021, 181, 167–190. [Google Scholar] [CrossRef]
- Zhang, T.; Peng, Z.; Wu, H.; He, Y.; Li, C.; Yang, C. Infrared small target detection via self-regularized weighted sparse model. Neurocomputing 2021, 420, 124–148. [Google Scholar] [CrossRef]
- Yan, H.; Paynabar, K.; Shi, J. Image-Based Process Monitoring Using Low-Rank Tensor Decomposition. IEEE Trans. Autom. Sci. Eng. 2015, 12, 216–227. [Google Scholar] [CrossRef]
- Hassanzadeh, S.; Karami, A.; Heylen, R.; Scheunders, P. Compression of hyperspectral images using block coordinate descent search and compressed sensing. In Proceedings of the 2016 8th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Los Angeles, CA, USA, 21–24 August 2016; pp. 1–4. [Google Scholar]
- Gao, X.; Yang, Y.; Tao, D.; Li, X. Discriminative optical flow tensor for video semantic analysis. Comput. Vis. Image Underst. 2009, 113, 372–383. [Google Scholar] [CrossRef]
- Kong, X.; Zhao, Y.; Xue, J.; Chan, J.C.-W. Hyperspectral Image Denoising Using Global Weighted Tensor Norm Minimum and Nonlocal Low-Rank Approximation. Remote Sens. 2019, 11, 2281. [Google Scholar] [CrossRef]
- Kong, X.; Zhao, Y.; Xue, J.; Chan, C.W.; Kong, S.G. Global and Local Tensor Sparse Approximation Models for Hyperspectral Image Destriping. Remote Sens. 2020, 12, 704. [Google Scholar] [CrossRef]
- Xue, J.; Zhao, Y.; Liao, W.; Chan, J.C.W. Nonlocal Low-Rank Regularized Tensor Decomposition for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5174–5189. [Google Scholar] [CrossRef]
- Xue, J.; Zhao, Y.; Liao, W.; Cheung-Wai Chan, J. Nonconvex tensor rank minimization and its applications to tensor recovery. Inf. Sci. 2019, 503, 109–128. [Google Scholar] [CrossRef]
- Goldfarb, D.; Qin, Z. Robust Low-Rank Tensor Recovery: Models and Algorithms. SIAM J. Matrix Anal. Appl. 2014, 35, 225–253. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared Patch-Image Model for Small Target Detection in a Single Image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Huang, B.; Mu, C.; Goldfarb, D.; Wright, J. Provable Models for Robust Low-Rank Tensor Completion. Pac. J. Optim. 2015, 11, 339–364. [Google Scholar]
- Lu, C.; Feng, J.; Chen, Y.; Liu, W.; Lin, Z.; Yan, S. Tensor Robust Principal Component Analysis: Exact Recovery of Corrupted Low-Rank Tensors via Convex Optimization. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 5249–5257. [Google Scholar]
- Xu, W.-H.; Zhao, X.-L.; Ji, T.-Y.; Miao, J.-Q.; Ma, T.-H.; Wang, S.; Huang, T.-Z. Laplace function based nonconvex surrogate for low-rank tensor completion. Signal Process. Image Commun. 2019, 73, 62–69. [Google Scholar] [CrossRef]
- Guan, X.; Zhang, L.; Huang, S.; Peng, Z. Infrared Small Target Detection via Nonconvex Tensor Rank Surrogate Joint Local Contrast Energy. Remote Sens. 2020, 12, 1520. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, G.; Yao, J.; Qi, C. Background Subtraction Based on Low-Rank and Structured Sparse Decomposition. IEEE Trans. Image Process. 2015, 24, 2502–2514. [Google Scholar] [CrossRef] [PubMed]
- Achanta, R.; Hemami, S.; Estrada, F.; Süsstrunk, S. Frequency-tuned Salient Region Detection. In Proceedings of the IEEE Conference on Computer Vision Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, Y.; Wang, Y.; Wang, D.; Peng, C.; He, G. Denoising of Hyperspectral Images Using Nonconvex Low Rank Matrix Approximation. IEEE Geosci. Remote Sens. Lett. 2017, 55, 5366–5380. [Google Scholar] [CrossRef]
- Available online: https://www.gscloud.cn/home (accessed on 5 May 2022).
- Ju, W.; Lam, N.S.N. An improved algorithm for computing local fractal dimension using the triangular prism method. Comput. Geosci. 2009, 35, 1224–1233. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Positive | Actual Negative | |
|---|---|---|
| predicted positive | TP | FP |
| predicted negative | FN | TN |
| . | IPI | LOGTFNN | PSTNN | KSVD Fractal | TMESNN | DivisorstepTP | Proposed |
|---|---|---|---|---|---|---|---|
| Seq1 | 0.1257 | 0.3324 | 0.0059 | 0.6303 | 0.1430 | 0.2986 | 0.8374 |
| Seq2 | 0.7008 | 0.4495 | 0.5711 | 0.7478 | 0.6832 | 0.3420 | 0.7612 |
| Seq3 | 0.2786 | 0.3706 | 0.2554 | 0.5563 | 0.1777 | 0.1387 | 0.8129 |
| Seq4 | 0.7645 | 0.6785 | 0.7645 | 0.7960 | 0.6740 | 0.5842 | 0.8443 |
| Seq5 | 0.6863 | 0.5587 | 0.3942 | 0.7548 | 0.6129 | 0.5405 | 0.8874 |
| Seq6 | 0.6303 | 0.6769 | 0.7395 | 0.8205 | 0.6463 | 0.5849 | 0.8488 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, S.; Peng, Z.; Li, F. Infrared Cirrus Detection Using Non-Convex Rank Surrogates for Spatial-Temporal Tensor. Remote Sens. 2023, 15, 2334. https://doi.org/10.3390/rs15092334
Xiao S, Peng Z, Li F. Infrared Cirrus Detection Using Non-Convex Rank Surrogates for Spatial-Temporal Tensor. Remote Sensing. 2023; 15(9):2334. https://doi.org/10.3390/rs15092334
Chicago/Turabian StyleXiao, Shengyuan, Zhenming Peng, and Fusong Li. 2023. "Infrared Cirrus Detection Using Non-Convex Rank Surrogates for Spatial-Temporal Tensor" Remote Sensing 15, no. 9: 2334. https://doi.org/10.3390/rs15092334
APA StyleXiao, S., Peng, Z., & Li, F. (2023). Infrared Cirrus Detection Using Non-Convex Rank Surrogates for Spatial-Temporal Tensor. Remote Sensing, 15(9), 2334. https://doi.org/10.3390/rs15092334