

Assessment of the GNSS-RTK for Application in Precision Forest Operations

Abstract
:
1. Introduction
2. Materials and Methods
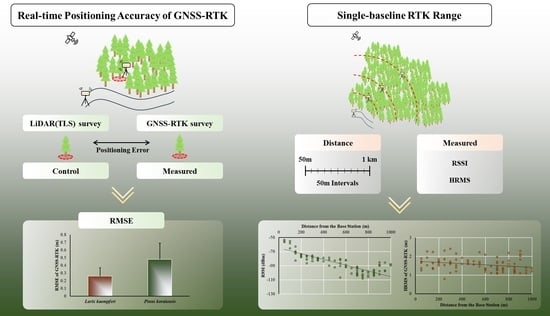
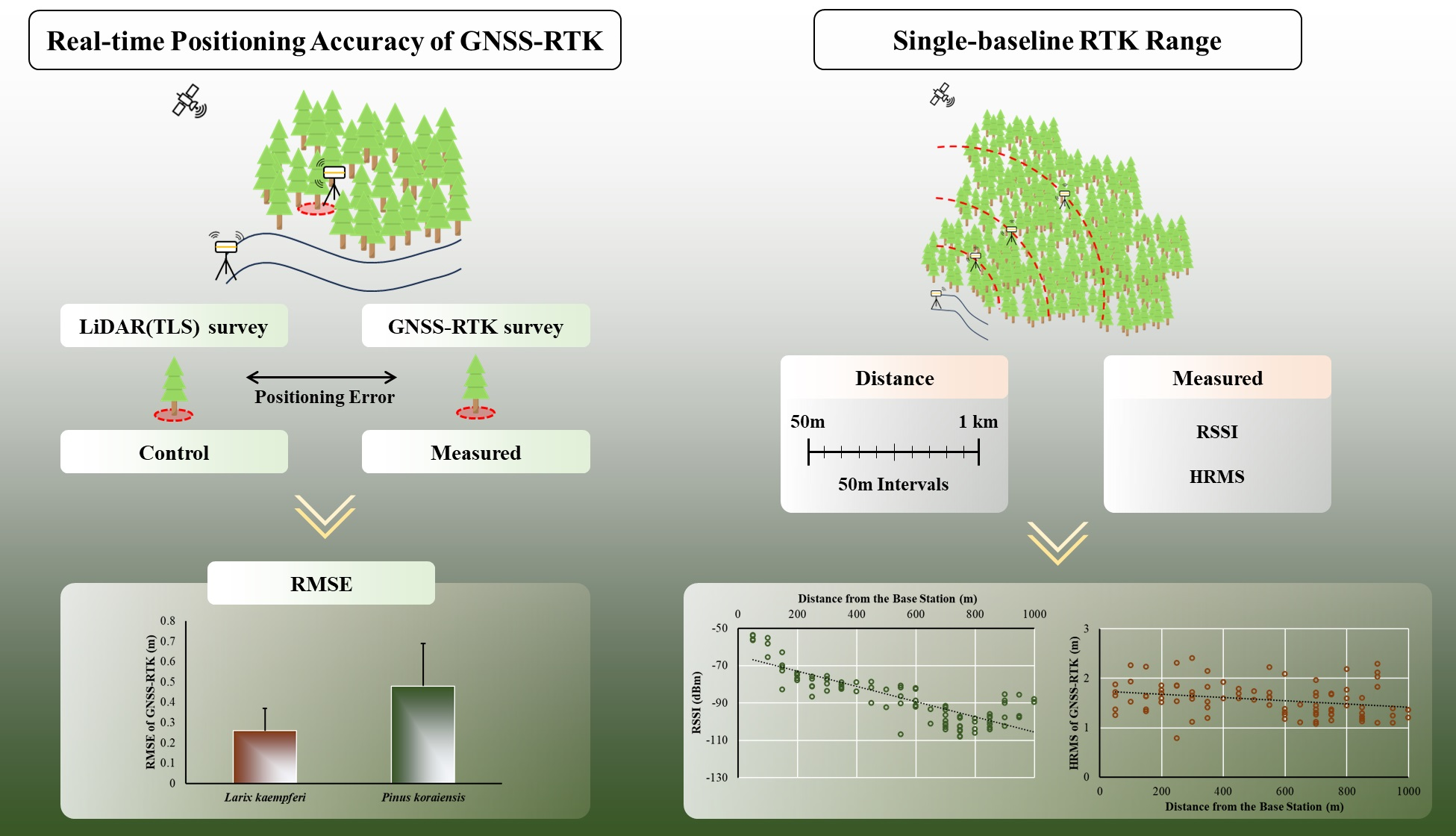
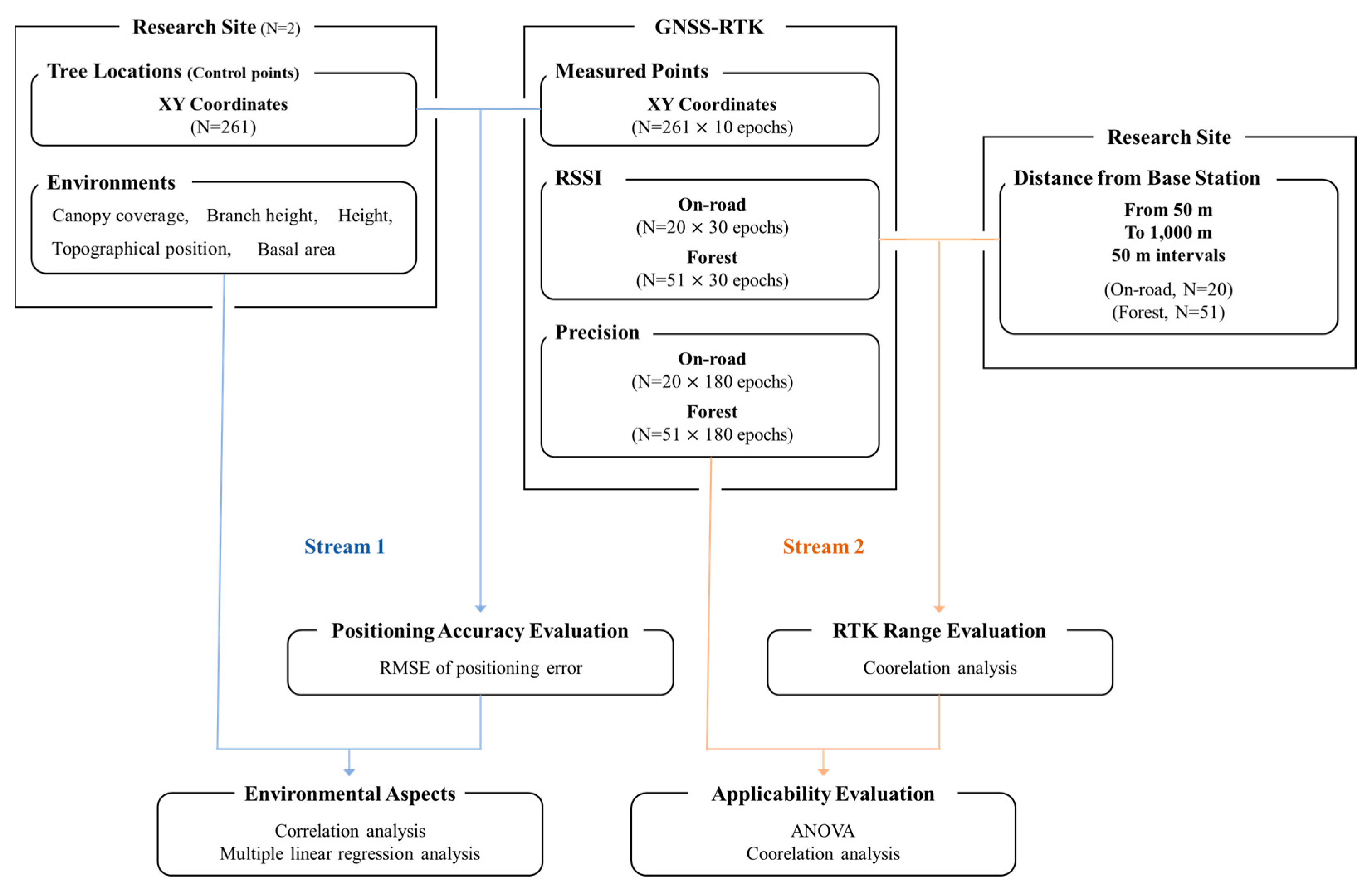
2.1. Experimental Design
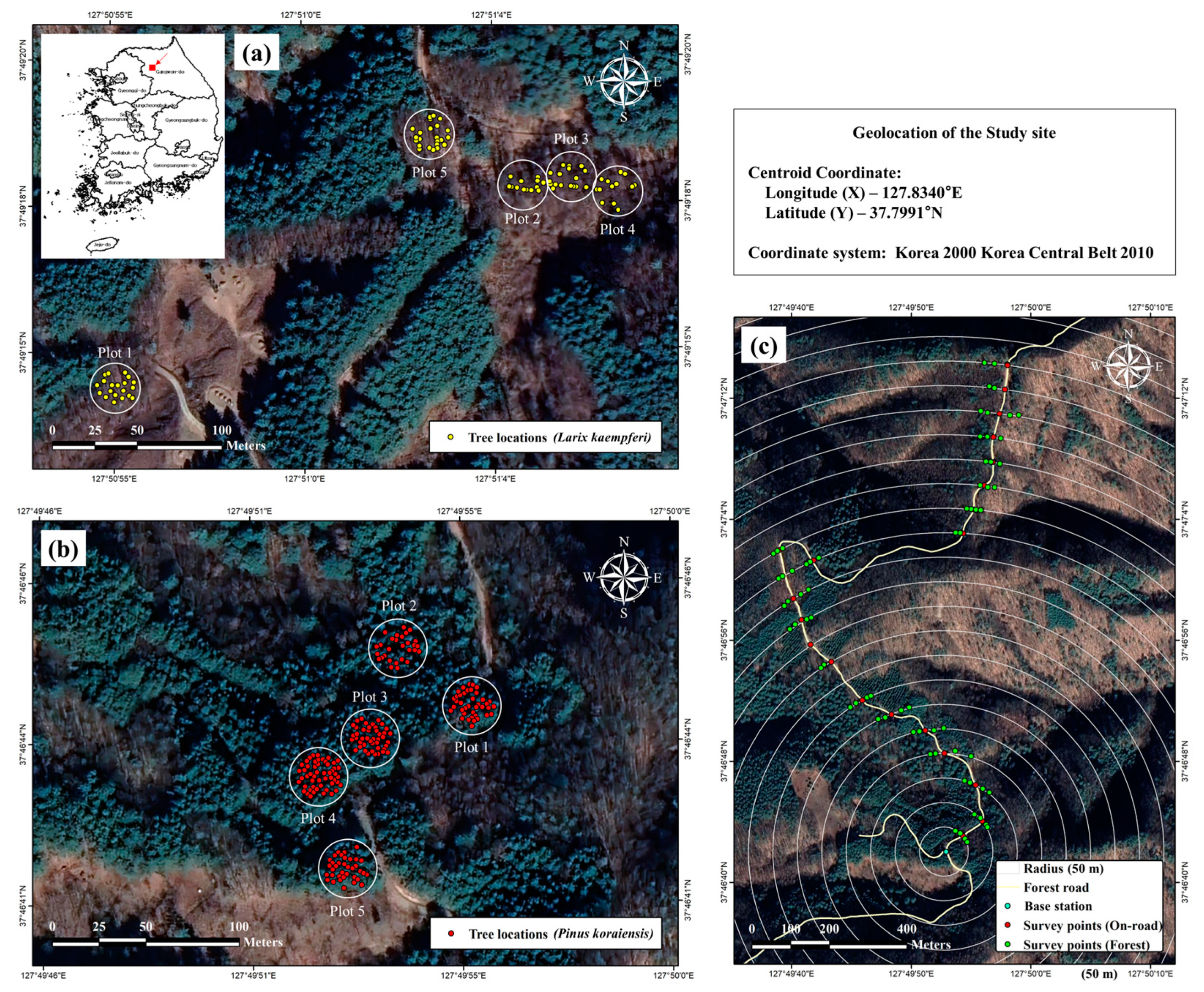
2.2. Study Site
2.3. Real-Time Positioning Accuracy Evaluation of the GNSS-RTK
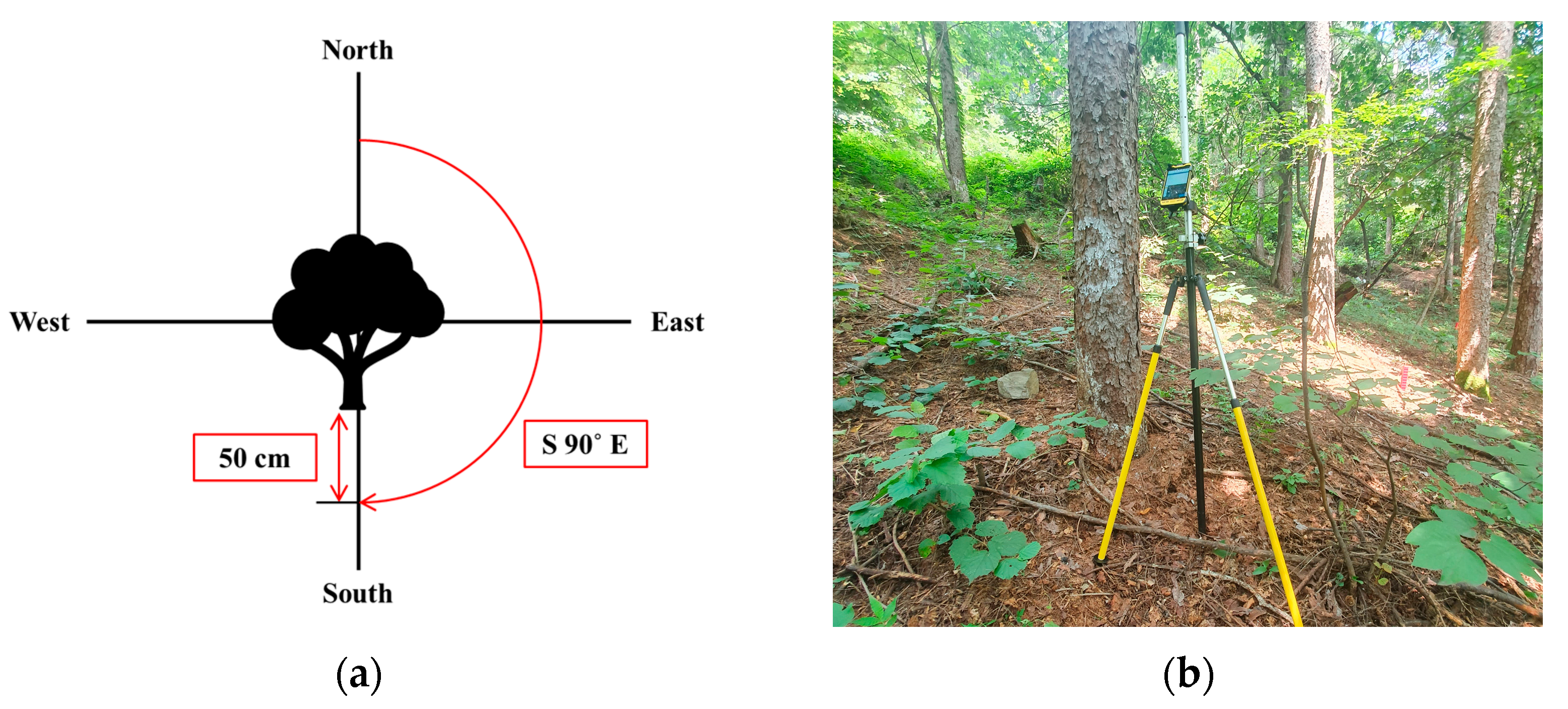
2.3.1. Positioning Survey
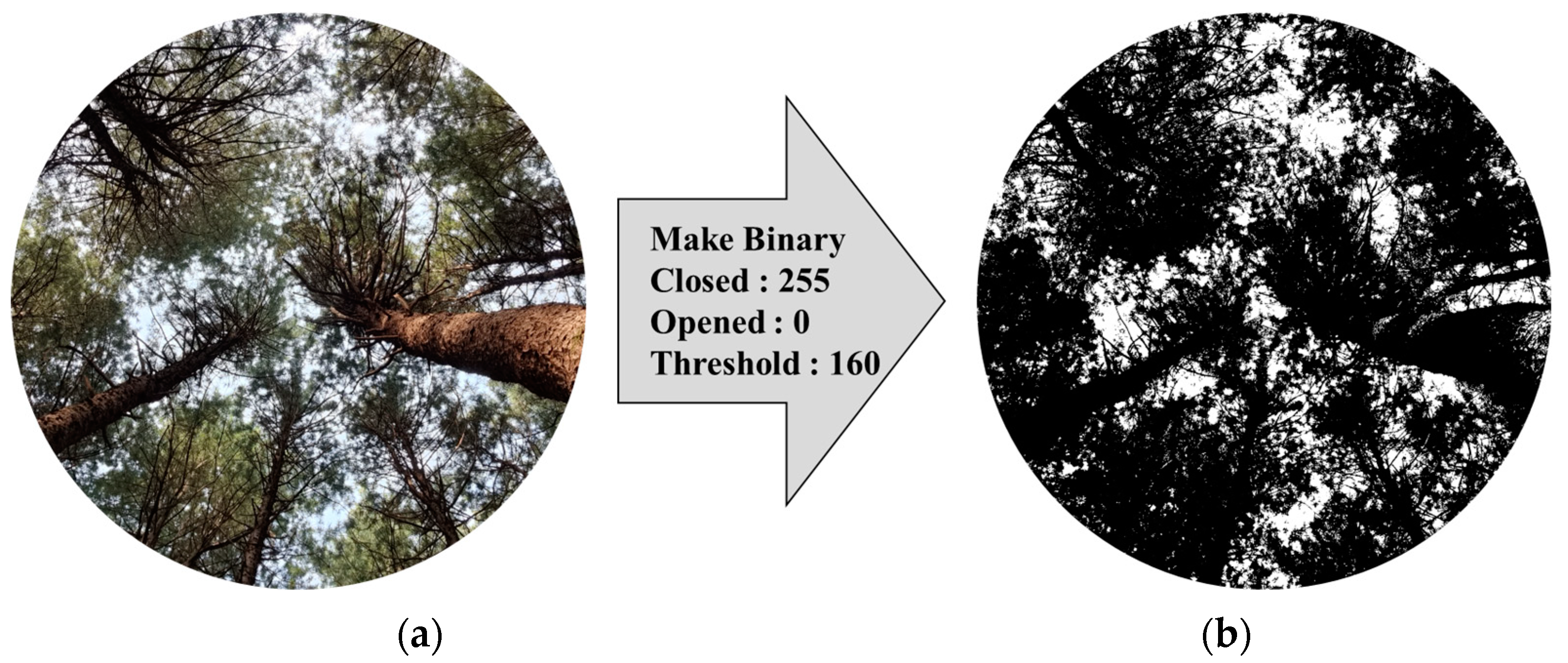
2.3.2. Forest Environment Survey
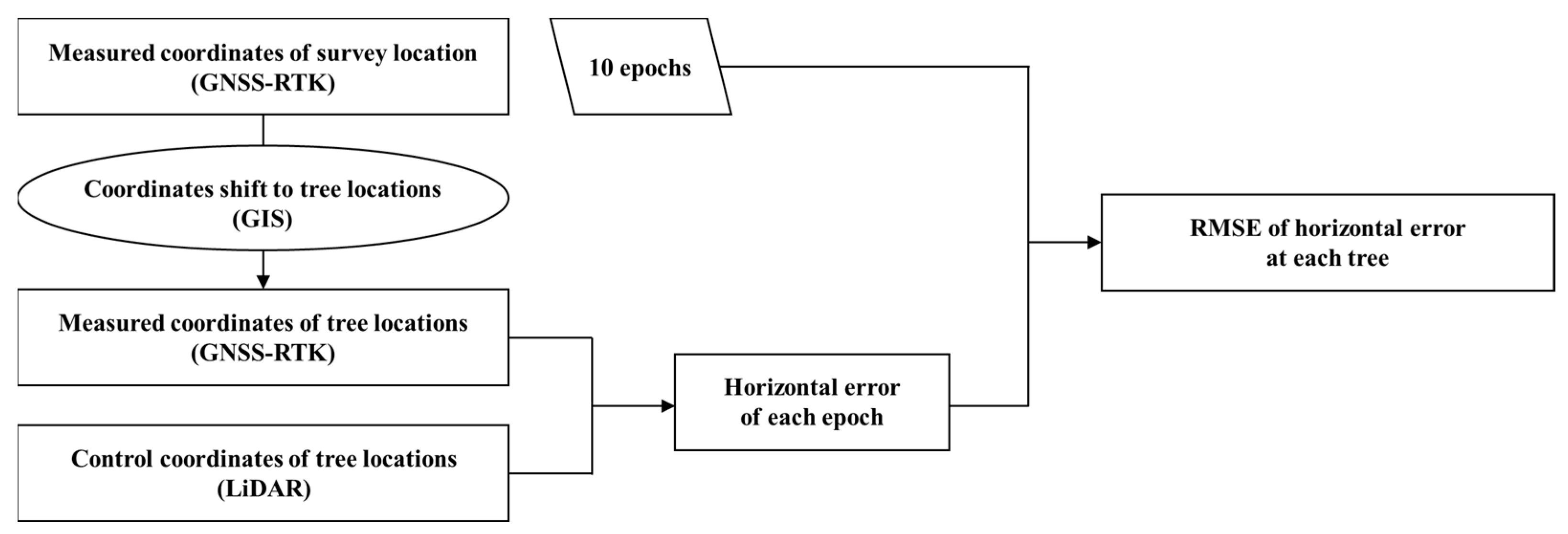
2.3.3. Positioning Accuracy Analysis
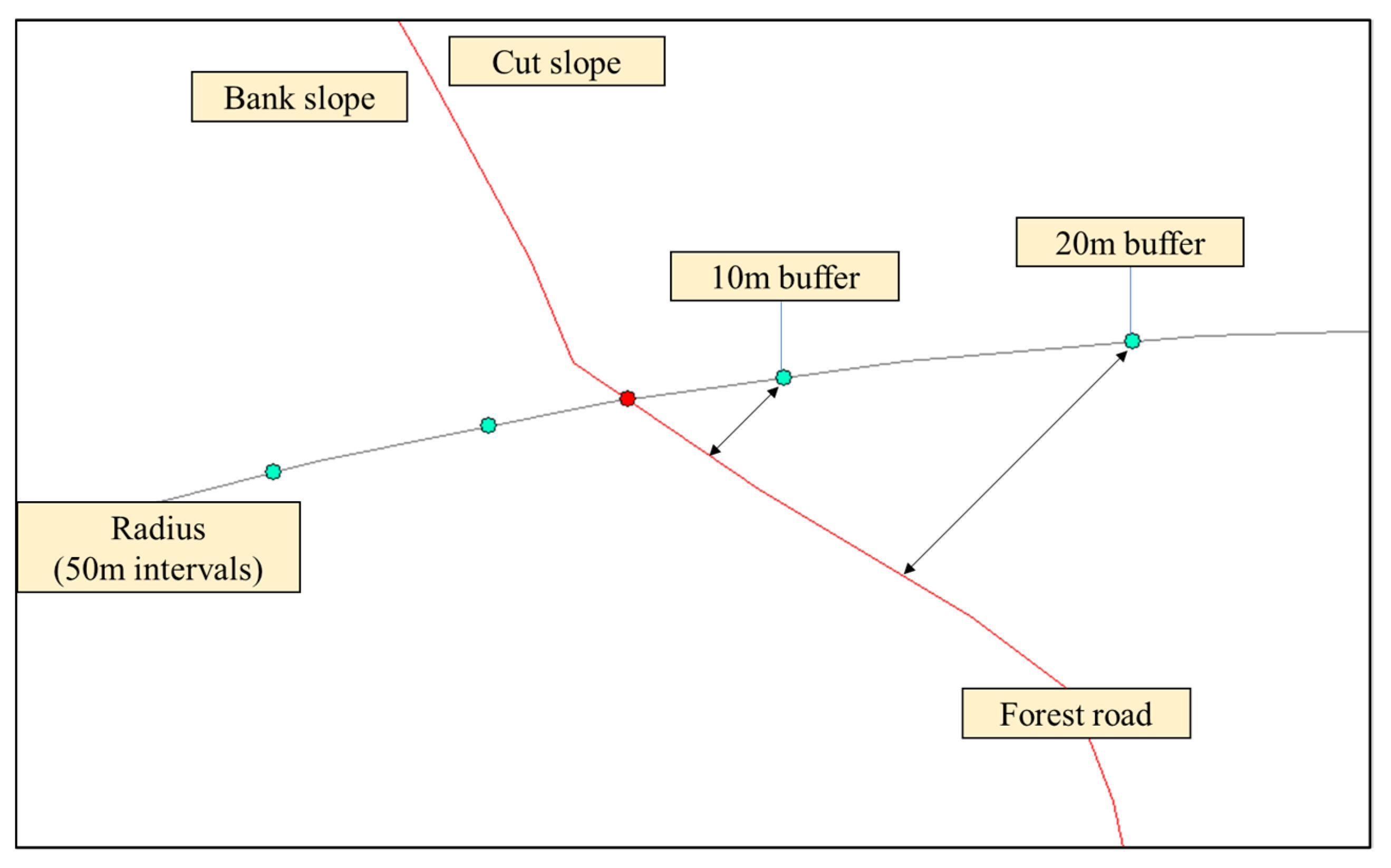
2.4. Range Evaluation of GNSS-RTK
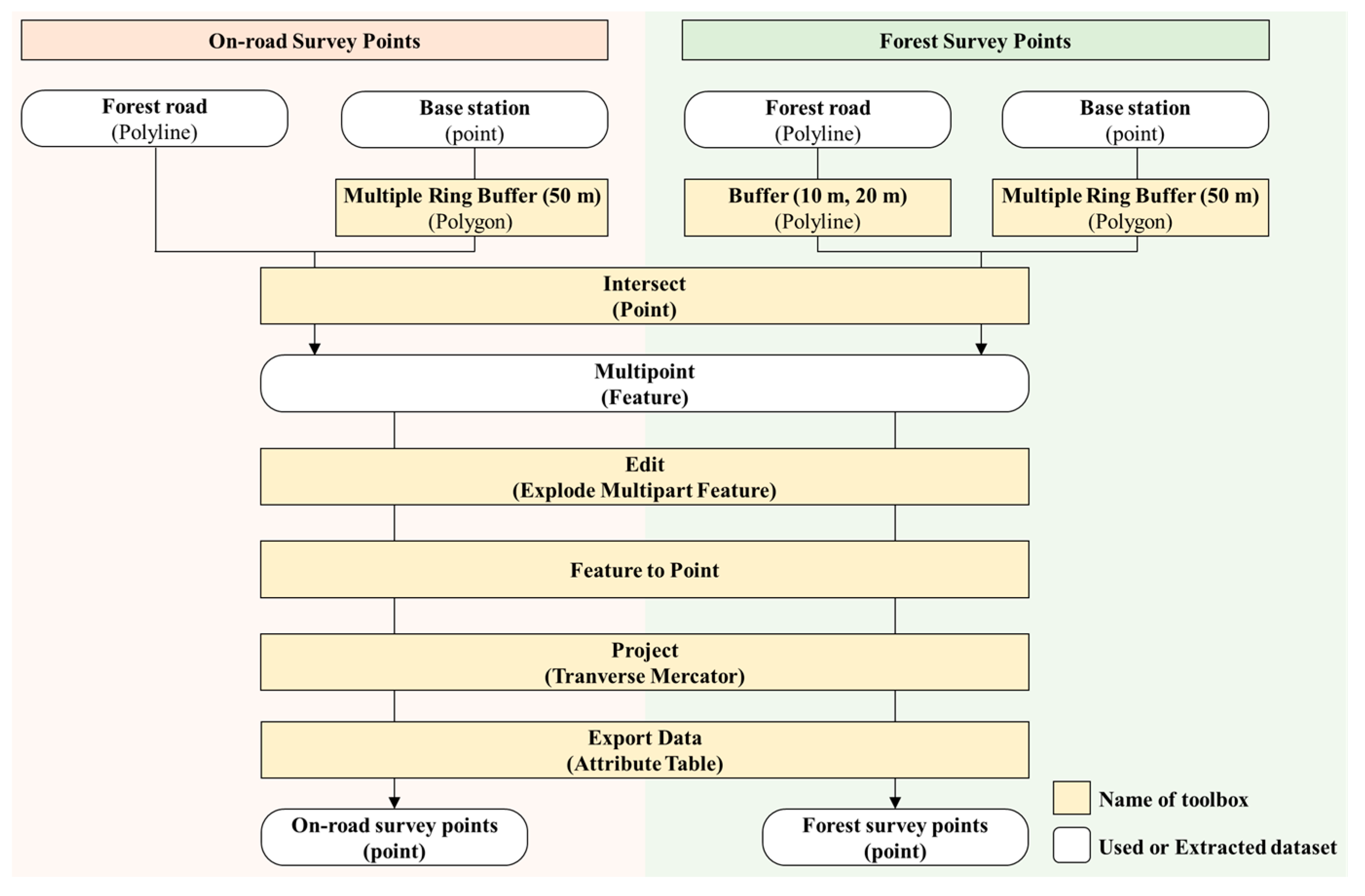
2.4.1. Positioning Precision and RSSI Survey
2.4.2. RTK Range Analysis
3. Results
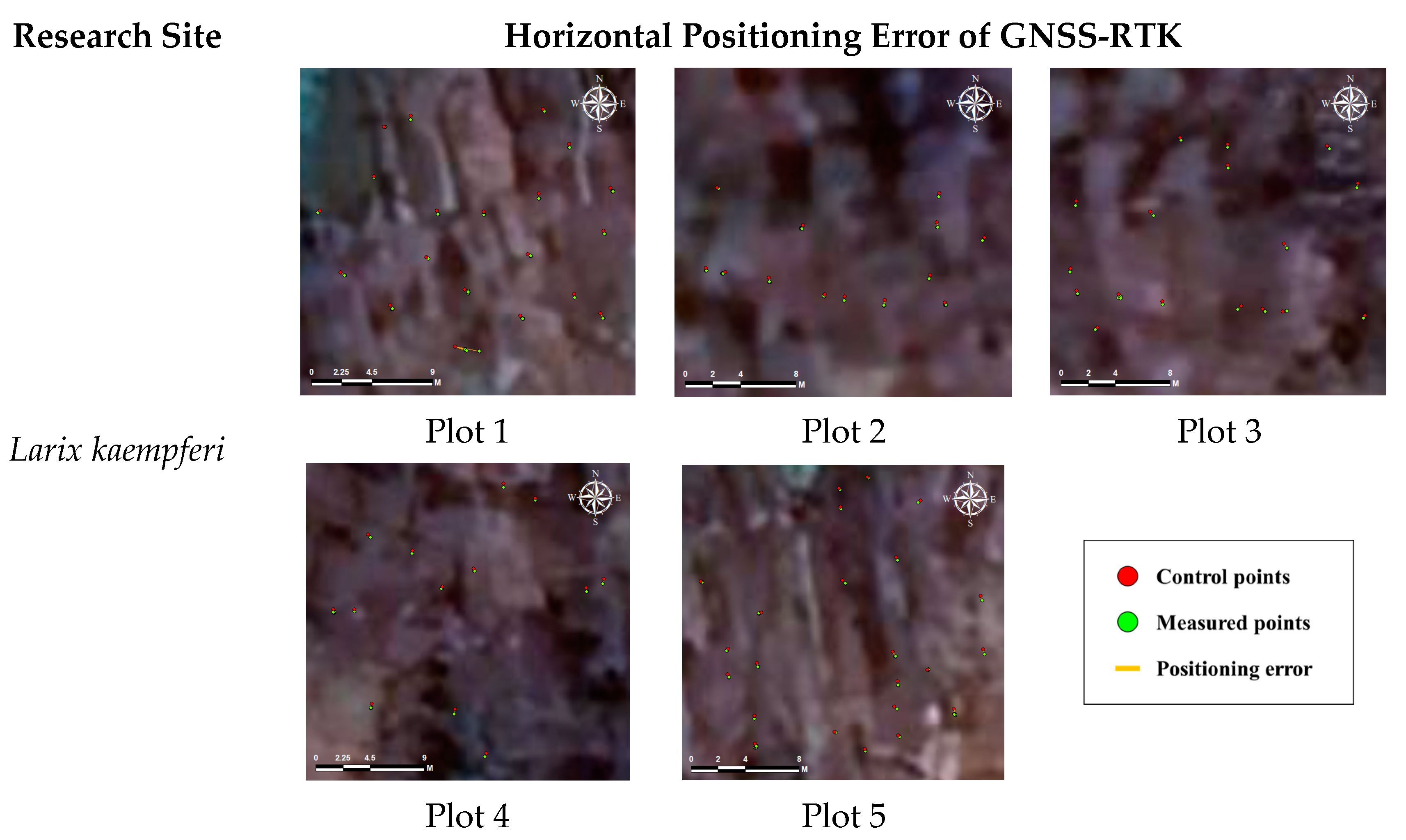
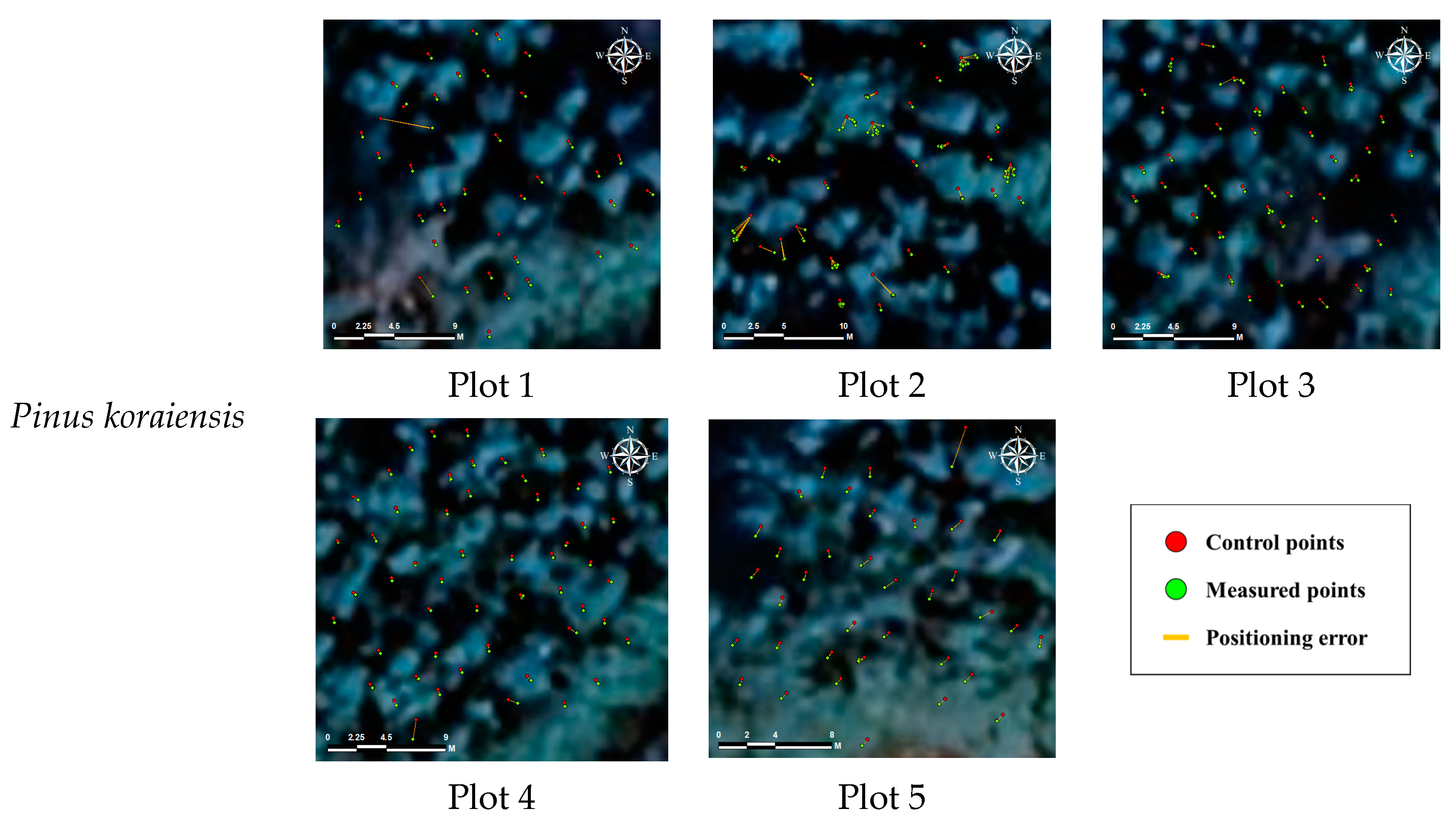
3.1. Real-Time Positioning Accuracy of GNSS-RTK
3.1.1. RMSE of Real-Time Positioning Accuracy
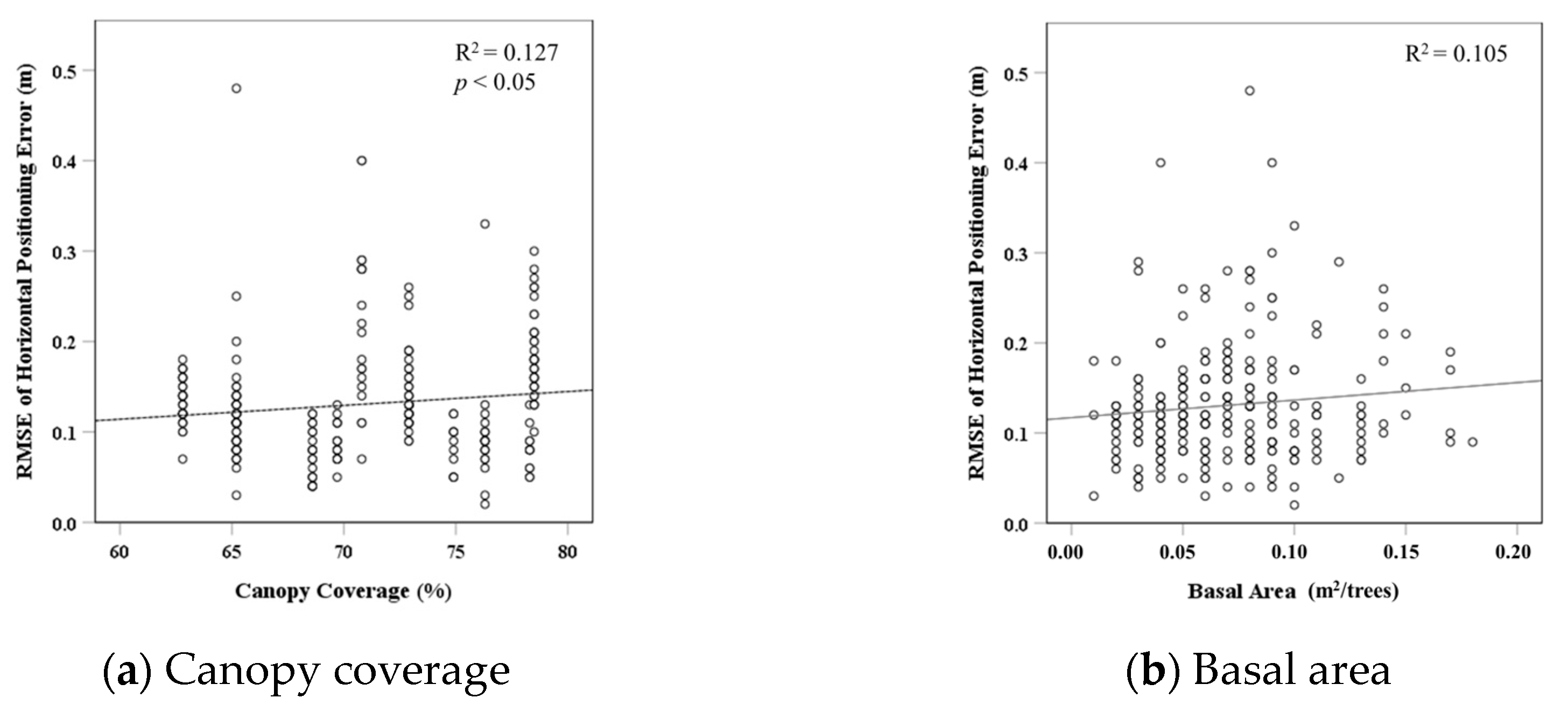
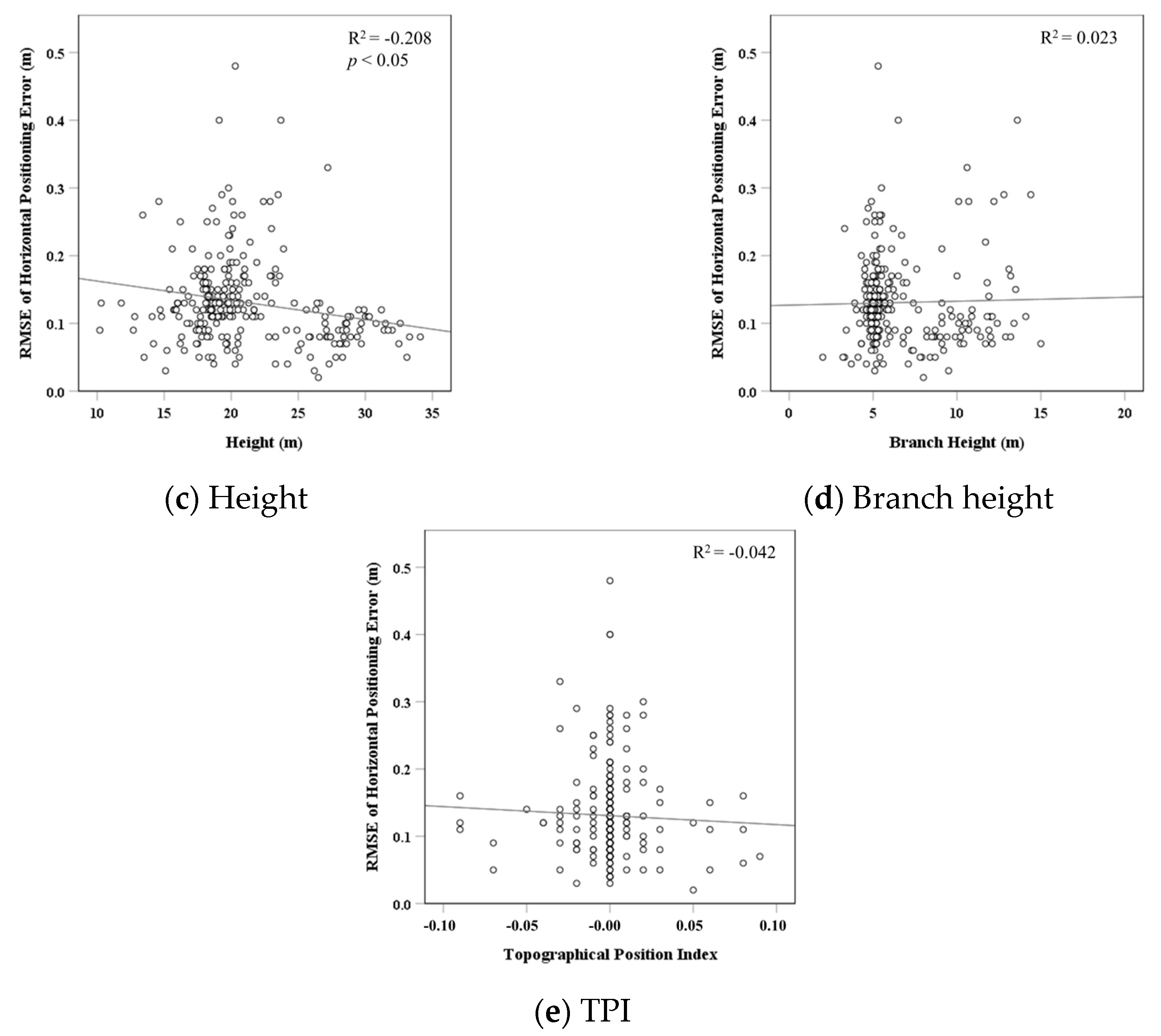
3.1.2. Relationship between Positioning Accuracy and Forest Environment
3.2. Range Evaluation of GNSS-RTK
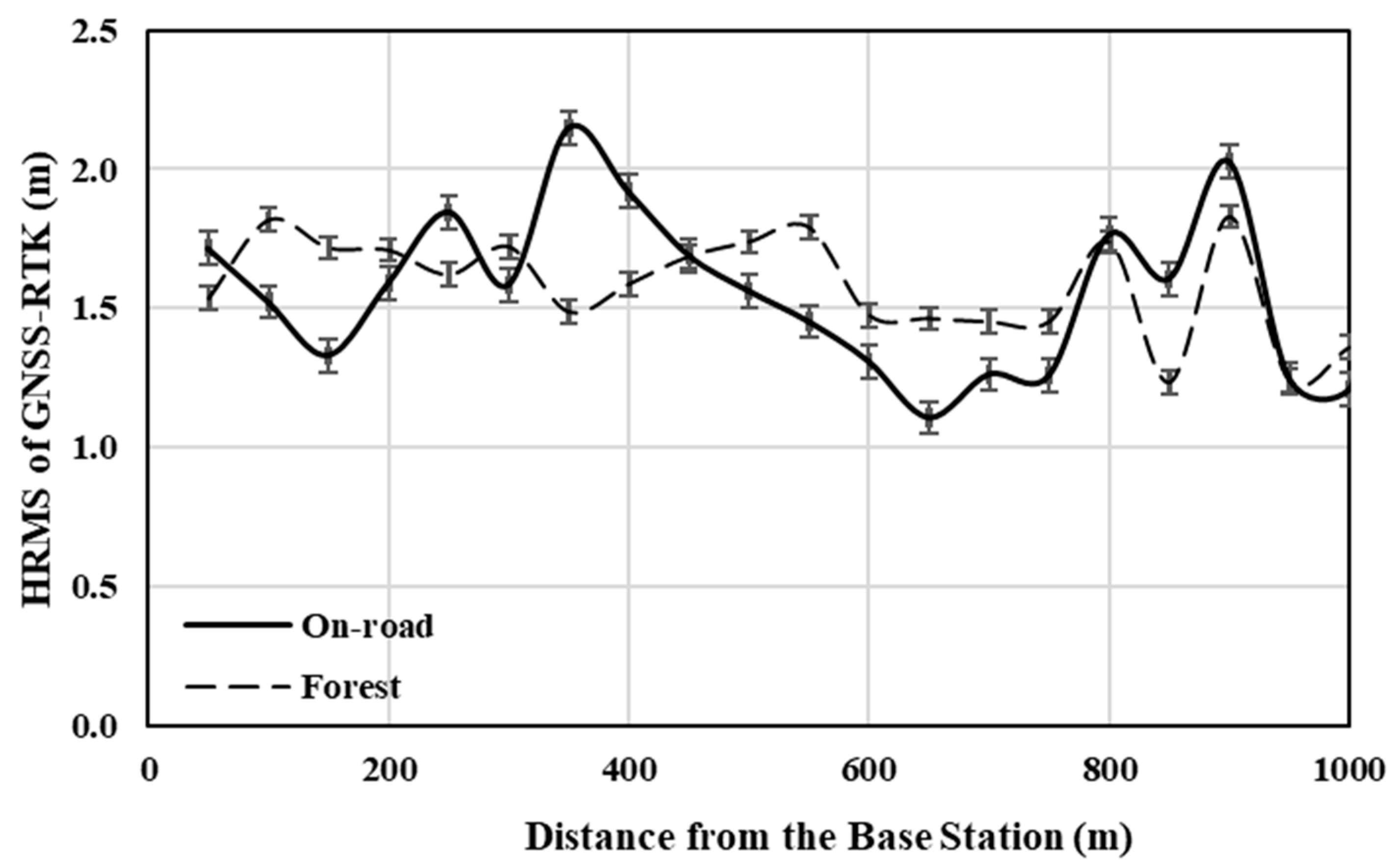
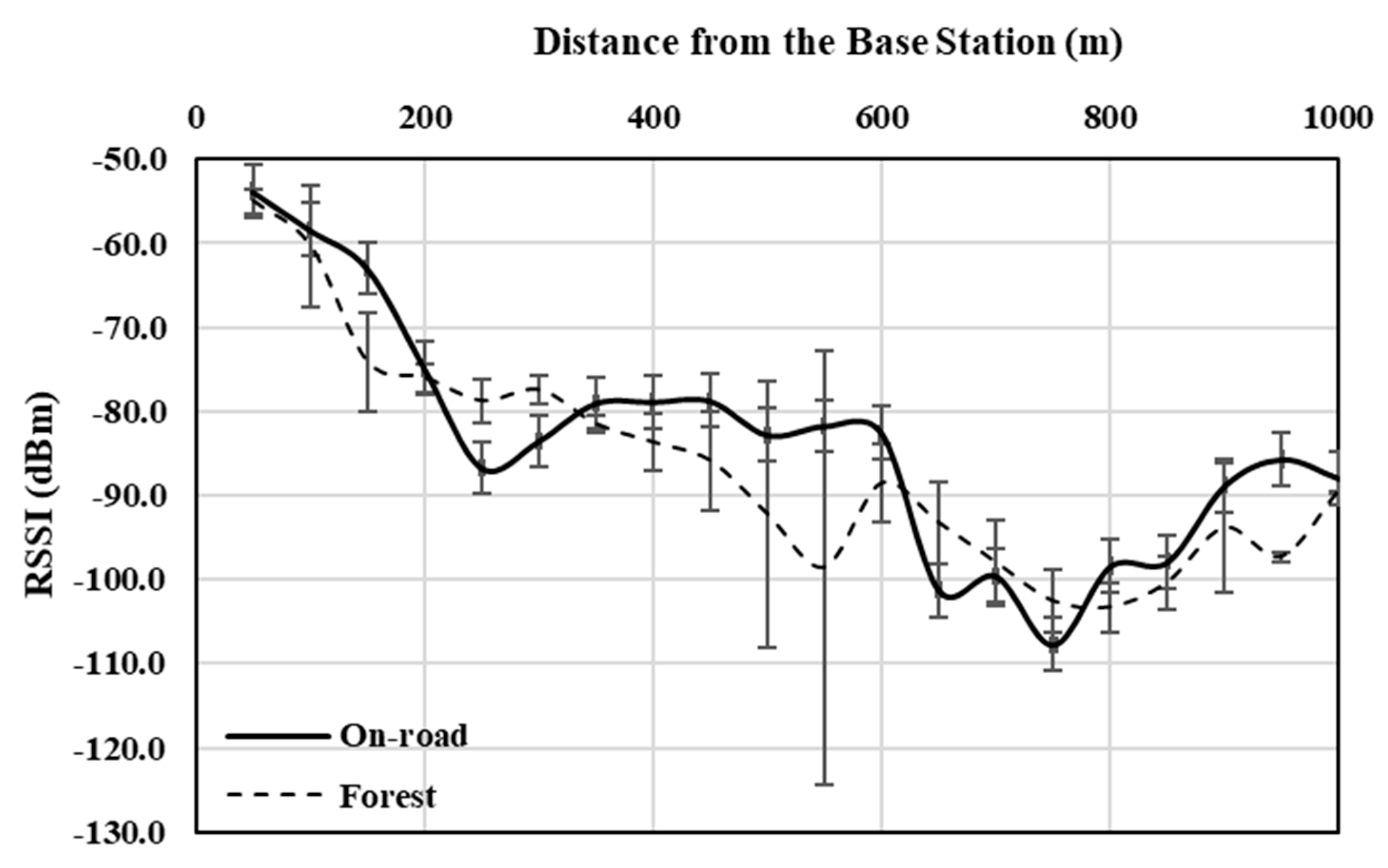
3.2.1. Positioning Precision and RSSI of GNSS-RTK Based on the Distance from the Base Station
3.2.2. Relationship between RSSI, Horizontal Root Mean Square (HRMS), and the Distance from the Base Station
3.3. Study Limitations
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gingras, J.F.; Charrette, F. FPInnovations’ New Forestry 4.0 Initiative. In Proceedings of the Council on Forest Engineering meeting, Bangor, ME, USA, 30 July 2017. [Google Scholar]
- Henning, K.; Wolfgang, W.; Johannes, H. Recommendations for Implementing the Strategic Initiative INDUSTRIE 4.0; Federal Ministry of Education and Research: Berlin, Germany, 2013.
- Hermann, M.; Pentek, T.; Otto, B. Design Principles for Industrie 4.0 Scenarios. In Proceedings of the 49th Hawaii International Conference on System Sciences, Koloa, HI, USA, 5–8 January 2016. [Google Scholar]
- Han, S.K.; Cho, M.J.; Baek, S.A.; Yun, J.U.; Cha, D.S. The Characteristics of Residual Stand Damages Caused by Skyline Thinning Operations in Mixed Conifer Stands in South Korea. J. For. Environ. Sci. 2019, 35, 197–204. [Google Scholar]
- Cho, M.J.; Choi, Y.S.; Oh, J.H.; Mun, H.S.; Han, S.K. Comparison of harvesting productivity, cost, and residual stand damages between single-tree selection thinning and mechanized line thinning using a small-scale grapple-saw. For. Sci. Technol. 2022, 18, 45–55. [Google Scholar] [CrossRef]
- Ko, C.; Lee, S.; Yim, J.; Kim, D.; Kang, J. Comparison of Forest Inventory Methods at Plot-Level between a Backpack Personal Laser Scanning (BPLS) and Conventional Equipment in Jeju Island, South Korea. Forests 2021, 12, 308. [Google Scholar] [CrossRef]
- Cho, H.M.; Oh, J.H.; Park, J.W.; Choi, Y.S.; Lee, J.S.; Han, S.K. Application of Real-time Positioning Systems to a Forest Stand for Precision Forest Management. Sens. Mater. 2022, 34, 4651–4668. [Google Scholar] [CrossRef]
- Beland, M.; Parker, G.; Sparrow, B.; Harding, D.; Chasmer, L.; Phinn, S.; Antonarakis, A.; Strahler, A. On promoting the use of lidar systems in forest ecosystem research. For. Ecol. Manag. 2019, 450, 117484. [Google Scholar] [CrossRef]
- Chisholm, R.A.; Cui, J.; Lum, S.K.Y.; Chen, B.M. UAV LiDAR for below-canopy forest surveys. J. Unmanned Veh. Syst. 2013, 1, 61–68. [Google Scholar] [CrossRef]
- Molina-Valero, J.A.; Villamayor, M.J.G.; Perez, M.A.N.; Alvarez-Gonzalez, J.G.; Montes, F.; Martinez-Calvo, A.; Perez-Cruzado, C. FORTLS: An R Package for Processing TLS Data and Estimating Stand Variables in Forest Inventories. Environ. Sci. Proc. 2021, 3, 38. [Google Scholar]
- Torre-Tojal, L.; Bastarrika, A.; Boyano, A.; Lopez-Guede, J.M.; Grana, M. Above-ground biomass estimation from LiDAR data using random forest algorithms. J. Comput. Sci. 2022, 58, 101517. [Google Scholar] [CrossRef]
- Pourshamsi, M.; Xia, J.; Yokoya, N.; Garcia, M.; Lavalle, M.; Pottier, E.; Balzter, H. Tropical forest canopy height estimation from combined polarimetric SAR and LiDAR using machine-learning. ISPRS J. Photogramm. Remote Sens. 2021, 172, 79–94. [Google Scholar] [CrossRef]
- Corte, A.P.D.; Souza, D.V.; Rex, F.E.; Sanquetta, C.R.; Mohan, M.; Silva, C.A.; Zambrano, A.M.A.; Prata, G.; de Almeida, D.R.A.; Trautenmuller, J.W.; et al. Forest inventory with high-density UAV-Lidar: Machine learning approaches for predicting individual tree attributes. Comput. Electron. Agric. 2020, 179, 105815. [Google Scholar] [CrossRef]
- Lee, Y.K.; Lee, J.S.; Park, J.W. A Study on Classification of Crown Classes and Selection of Thinned Trees for Major Conifers Using Machine Learning Techniques. J. Korean Soc. For. Sci. 2022, 111, 302–310. [Google Scholar]
- Nuutinen, Y.; Miina, J.; Saksa, T.; Bergstrom, D.; Routa, J. Comparing the characteristics of boom-corridor and selectively thinned stands of Scots pine and birch. Silva Fenn. 2021, 55, 10462. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13, e0191017. [Google Scholar] [CrossRef] [PubMed]
- Gallo, R.; Grigolato, S.; Cavalli, R.; Mazzetto, F. GNSS-based operational monitoring devices for forest logging operation chains. J. Agric. Eng. 2013, 44 (Suppl. S2), 27. [Google Scholar] [CrossRef]
- Zaidi, A.S.; Suddle, M.R. Global Navigation Satellite Systems: A Survey. In Proceedings of the International Conference on Advances in Space Technologies, Islamabad, Pakistan, 2–3 September 2006. [Google Scholar]
- Kim, H.; Hyun, C.U.; Park, H.D.; Cha, J. Image Mapping Accuracy Evaluation Using UAV with Standalone, Differential (RTK), and PPP GNSS Positioning Techniques in an Abandoned Mine Site. Sensors 2023, 23, 5858. [Google Scholar] [CrossRef]
- Klimanek, M. Analysis of the accuracy of GPS Trimble Juno ST measurement in the conditions of forest canopy. J. For. Sci. 2010, 56, 84–91. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y.; He, X.; Chen, W.; Li, B. A composite stochastic model considering the terrain topography for real-time GNSS monitoring in canyon environments. J. Geod. 2022, 96, 79. [Google Scholar] [CrossRef]
- Zhang, Z.; Zeng, J.; Li, B.; He, X. Principles, methods and applications of cycle slip detection and repair under complex observation conditions. J. Geod. 2023, 97, 50. [Google Scholar] [CrossRef]
- Reid, T.G.R.; Pervez, N.; Ibrahim, U.; Houts, S.E.; Pandey, G.; Alla, N.K.R.; Hsia, A. Standalone and RTK GNSS on 30,000 km of North American Highways. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Gumilar, I.; Bramanto, B.; Rahman, F.F.; Hermawan, I.M.D.A. Variability and Performance of Short to Long-Range Single Baseline RTK GNSS Positioning in Indonesia. E3S Web Conf. 2019, 94, 01012. [Google Scholar] [CrossRef]
- Ogutcu, S.; Kalayci, I. Accuracy and precision of network-based RTK techniques as a function of baseline distance and occupation time. Arab. J. Geosci. 2018, 11, 354. [Google Scholar] [CrossRef]
- Riemann, A.I.; Evans, N.E. The incidence of radio-frequency impulsive noise within hospital buildings: Initial measurements in the 450 MHz band. Med. Eng. Phys. 1999, 21, 567–574. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P.; Bartone, C.G. Global Navigation Satellite Systems, Inertial Navigation, and Integration, 4th ed.; Wiley & Sons, Inc.: Hoboken, NJ, USA, 2020; p. 34. [Google Scholar]
- Iswandi; Nastiti, H.T.; Praditya, I.E.; Mustika, I.W. Evaluation of XBee-Pro Transmission Range for Wireless Sensor Network’s Node under Forested Environments Based on Received Signal Strength Indicator (RSSI). In Proceedings of the 2nd International Conference on Science and Technology-Computer (ICST), Yogyakarta, Indonesia, 27–28 October 2016. [Google Scholar]
- Michalowska, M.; Rapinski, J.; Janicka, J. Tree position estimation from TLS data using hough transform and robust least-squares circle fitting. Remote Sens. Appl. Soc. Environ. 2023, 29, 100863. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. First Evaluation of Topography on GNSS-R: An Empirical Study Based on a Digital Elevation Model. Remote Sens. 2019, 11, 2556. [Google Scholar] [CrossRef]
- Lee, D.; Jung, S.; Choi, J. Analysis of Tree Growth Characteristics by First and Second Thinning in Korean White Pine Plantations. J. Korean Soc. For. Sci. 2022, 111, 150–164. [Google Scholar]
- Abdi, O.; Uusitalo, J.; Pietarinen, J.; Lajunen, A. Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet. Remote Sens. 2022, 14, 2856. [Google Scholar] [CrossRef]
- de Bakker, P.F.; Tiberius, C.C.J.M. Real-time multi-GNSS single-frequency precise point positioning. GPS Solut. 2017, 21, 1791–1803. [Google Scholar] [CrossRef]
- Keefe, R.F.; Wempe, A.M.; Becker, R.M.; Zimbelman, E.G.; Nagler, E.S.; Gilbert, S.L.; Caudill, C.C. Positioning Methods and the Use of Location and Activity Data in Forests. Forests 2019, 10, 458. [Google Scholar] [CrossRef]
- Islam, S. Infrastructure-less Positioning: Localization in GNSS-denied Environments. Master’s Thesis, Tampere University, Tampere, Finland, 2019. [Google Scholar]
- Ilci, V. Accuracy comparison of real-time GNSS positioning solutions: Case study of Mid-North Anatolia. Measurement 2019, 142, 40–47. [Google Scholar] [CrossRef]
- Omogunloye, O.G.; Okorocha, C.V.; Ojegbile, B.M.; Odumosu, J.O.; Ajayi, O.G. Comparative analysis of the standard error in relative GNSS positioning for short, medium and long baselines. J. Geomat. 2017, 11, 207–217. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot No. | Stand Density (Trees/Ha) | DBH a (cm) | Tree Height (m) | Canopy Coverage (%) | |
|---|---|---|---|---|---|
| Larix kaempferi | 1 | 500 | 31.4 (22.3–38.2) | 27.6 (20.7–34.1) | 76.3 (59.1–86.9) |
| 2 | 325 | 31.3 (20.1–40.5) | 23.9 (13.5–28.3) | 78.3 (74.1–83.3) | |
| 3 | 425 | 33.9 (16.9–46.5) | 27.4 (10.2–33.3) | 69.7 (62.1–81.5) | |
| 4 | 325 | 37.7 (23.9–47.5) | 26.6 (17.6–32.6) | 74.9 (70.0–80.4) | |
| 5 | 575 | 31.0 (16.2–42.8) | 24.9 (13.2–29.7) | 68.6 (57.3–74.5) | |
| Avg. | 430 | 32.7 (16.2–47.5) | 26.1 (10.2–34.1) | 73.6 (53.3–86.9) | |
| Pinus koraiensis | 1 | 975 | 27.5 (12.9–43.0) | 19.9 (14.7–27.4) | 62.8 (51.6–70.9) |
| 2 | 725 | 29.9 (12.5–50.3) | 21.0 (14.6–24.8) | 70.8 (67.1–76.6) | |
| 3 | 1225 | 26.5 (15.0–47.0) | 17.6 (10.3–22.9) | 72.9 (67.8–76.6) | |
| 4 | 1300 | 26.5 (12.0–44.0) | 18.6 (15.1–23.3) | 65.2 (60.9–68.4) | |
| 5 | 900 | 29.0 (16.0–48.0) | 18.5 (15.4–21.9) | 78.5 (74.2–85.9) | |
| Avg. | 1025 | 27.6 (12.0–50.3) | 19.0 (10.3–27.4) | 70.0 (51.6–85.9) | |
| Content | Data | Image | ||
|---|---|---|---|---|
| Company | Trimble |  | ||
| Model | R12i | |||
| Satellite signal reception | GPS: L1C, L1C/A, L2C, L2E, L5 GLONASS: L1C/A, L1P, L2C/A, L2P, L3 SBAS: L1C/A, L5 Galileo: E1, E5A, E5B, E5 AltBOC, E62 BeiDou: B1, B1C, B2, B2A, B2B, B3 QZSS: L1C/A, L1S, L1C, L2C, L5, L6 NavIC (IRNSS): L5 | |||
| Positioning rate | 1 Hz, 2 Hz, 5 Hz, 10 Hz, 20 Hz | |||
| Positioning precision | Static | Horizontal: 3 mm + 0.1 ppm Vertical: 3.5 mm + 0.4 ppm | ||
| RTK | Single baseline | Horizontal: 8 mm + 1 ppm Vertical: 15 mm + 1 ppm | ||
| Network | Horizontal: 8 mm + 0.5 ppm Vertical: 15 mm + 0.5 ppm | |||
| Radio signal transmission power/range | 2 W/3–5 km | |||
| Hardware | Size: 11.9 (W) × 13.6 (H) cm Weight: 1.12 kg | |||
| RMSE a Unit: m | Larix kaempferi Stand | Pinus koraiensis Stand | ||||
|---|---|---|---|---|---|---|
| N | Mean | SD b | N | Mean | SD | |
| Plot 1 | 20 | 0.30 (0.06–0.93) | 0.17 | 33 | 0.44 (0.23–1.43) | 0.20 |
| Plot 2 | 12 | 0.25 (0.15–0.40) | 0.08 | 20 | 0.67 (0.22–1.26) | 0.31 |
| Plot 3 | 17 | 0.28 (0.17–0.41) | 0.07 | 44 | 0.43 (0.27–0.84) | 0.11 |
| Plot 4 | 11 | 0.26 (0.14–0.38) | 0.08 | 47 | 0.38 (0.10–1.52) | 0.21 |
| Plot 5 | 22 | 0.23 (0.12–0.38) | 0.09 | 35 | 0.59 (0.30–0.95) | 0.15 |
| Total | 82 | 0.26 (0.06–0.93) | 0.11 | 179 | 0.48 (0.10–1.52) | 0.21 |
| Regression Equations | N | R2 | ANOVA | |||
|---|---|---|---|---|---|---|
| F | p-Value | |||||
| RMSE a of horizontal positioning error | = | +0.119 | 261 | 0.167 | 10.166 | 0.000 * |
| Canopy coverage | ||||||
| Basal area | ||||||
| Tree height | ||||||
| Branch height | ||||||
| TPI | ||||||
| Forest Environmental Factor | VIF a |
|---|---|
| Canopy coverage | 1.056 |
| Basal area | 1.549 |
| Tree height | 2.050 |
| Branch height | 1.532 |
| TPI | 1.012 |
| Distance from the Base Station (m) | On-Road | Forest | ||||
|---|---|---|---|---|---|---|
| Number of Survey Points | HRMS a (m) | Number of Survey Points | HRMS (m) | |||
| Mean | SD | Mean | SD | |||
| 50 | 1 | 1.7 | N/A | 4 | 1.5 | 0.3 |
| 100 | 1 | 1.5 | 2 | 1.8 | 0.2 | |
| 150 | 1 | 1.3 | 4 | 1.7 | 0.4 | |
| 200 | 1 | 1.6 | 4 | 1.7 | 0.1 | |
| 250 | 1 | 1.8 | 4 | 1.6 | 0.6 | |
| 300 | 1 | 1.6 | 4 | 1.7 | 0.5 | |
| 350 | 1 | 2.1 | 4 | 1.5 | 0.3 | |
| 400 | 1 | 1.9 | 1 | 1.6 | 0.2 | |
| 450 | 1 | 1.7 | 2 | 1.7 | 0.1 | |
| 500 | 1 | 1.6 | 1 | 1.7 | 0.2 | |
| 550 | 1 | 1.5 | 4 | 1.8 | 0.3 | |
| 600 | 1 | 1.3 | 4 | 1.5 | 0.4 | |
| 650 | 1 | 1.1 | 1 | 1.5 | 0.4 | |
| 700 | 1 | 1.3 | 8 | 1.5 | 0.3 | |
| 750 | 1 | 1.3 | 7 | 1.5 | 0.2 | |
| 800 | 1 | 1.8 | 3 | 1.7 | 0.4 | |
| 850 | 1 | 1.6 | 6 | 1.2 | 0.1 | |
| 900 | 1 | 2.0 | 4 | 1.8 | 0.5 | |
| 950 | 1 | 1.2 | 2 | 1.2 | 0.2 | |
| 1000 | 1 | 1.2 | 2 | 1.4 | 0.0 | |
| Total | 20 | 1.5 | 0.3 | 71 | 1.6 | 0.2 |
| Distance from the Base Station (m) | On-Road | Forest | ||||
|---|---|---|---|---|---|---|
| Number of Survey Points | RSSI a (dBm) | Number of Survey Points | RSSI (dBm) | |||
| Mean | SD | Mean | SD | |||
| 50 | 1 | –53.8 | N/A | 4 | –55.0 | 1.4 |
| 100 | 1 | –58.4 | 2 | –60.3 | 7.3 | |
| 150 | 1 | –62.9 | 4 | –74.1 | 5.9 | |
| 200 | 1 | –74.8 | 4 | –76.0 | 1.7 | |
| 250 | 1 | –86.7 | 4 | –78.8 | 2.7 | |
| 300 | 1 | –83.5 | 4 | –77.5 | 1.7 | |
| 350 | 1 | –79.0 | 4 | –81.5 | 1.0 | |
| 400 | 1 | –78.9 | 1 | –83.7 | 3.4 | |
| 450 | 1 | –78.7 | 2 | –85.9 | 5.9 | |
| 500 | 1 | –82.8 | 1 | –92.2 | 15.8 | |
| 550 | 1 | –81.7 | 4 | –98.6 | 25.8 | |
| 600 | 1 | –82.6 | 4 | –88.6 | 4.7 | |
| 650 | 1 | –101.3 | 1 | –93.3 | 4.9 | |
| 700 | 1 | –99.6 | 8 | –98.0 | 5.1 | |
| 750 | 1 | –107.7 | 7 | –102.6 | 3.8 | |
| 800 | 1 | –98.4 | 3 | –103.3 | 2.9 | |
| 850 | 1 | –97.9 | 6 | –100.4 | 3.3 | |
| 900 | 1 | –88.8 | 4 | –93.9 | 7.7 | |
| 950 | 1 | –85.7 | 2 | –97.3 | 0.5 | |
| 1000 | 1 | –88.0 | 2 | –89.5 | 0.1 | |
| Total | 20 | –83.6 | 14.0 | 71 | –86.4 | 13.6 |
| Category | Variable | N | Mean | SD | t | p-Value |
|---|---|---|---|---|---|---|
| HRMS a | On-road | 20 | 0.28 | 0.06 | 0.409 | 0.687 |
| Forest | 20 | 0.18 | 0.04 | |||
| RSSI b | On-road | 20 | −83.56 | 14.02 | −1.936 | 0.068 |
| Forest | 20 | −86.44 | 13.55 |
| Variables | Distance from the Base Station | RSSI | HRMS |
|---|---|---|---|
| Distance from the base station | 1 | −0.834 * | −0.274 * |
| RSSI a | - | 1 | 0.267 * |
| HRMS b | - | - | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, H.-M.; Park, J.-W.; Lee, J.-S.; Han, S.-K. Assessment of the GNSS-RTK for Application in Precision Forest Operations. Remote Sens. 2024, 16, 148. https://doi.org/10.3390/rs16010148
Cho H-M, Park J-W, Lee J-S, Han S-K. Assessment of the GNSS-RTK for Application in Precision Forest Operations. Remote Sensing. 2024; 16(1):148. https://doi.org/10.3390/rs16010148
Chicago/Turabian StyleCho, Hyun-Min, Jin-Woo Park, Jung-Soo Lee, and Sang-Kyun Han. 2024. "Assessment of the GNSS-RTK for Application in Precision Forest Operations" Remote Sensing 16, no. 1: 148. https://doi.org/10.3390/rs16010148
APA StyleCho, H. -M., Park, J. -W., Lee, J. -S., & Han, S. -K. (2024). Assessment of the GNSS-RTK for Application in Precision Forest Operations. Remote Sensing, 16(1), 148. https://doi.org/10.3390/rs16010148