

Extraction of Building Roof Contours from Airborne LiDAR Point Clouds Based on Multidirectional Bands


Abstract
:1. Introduction
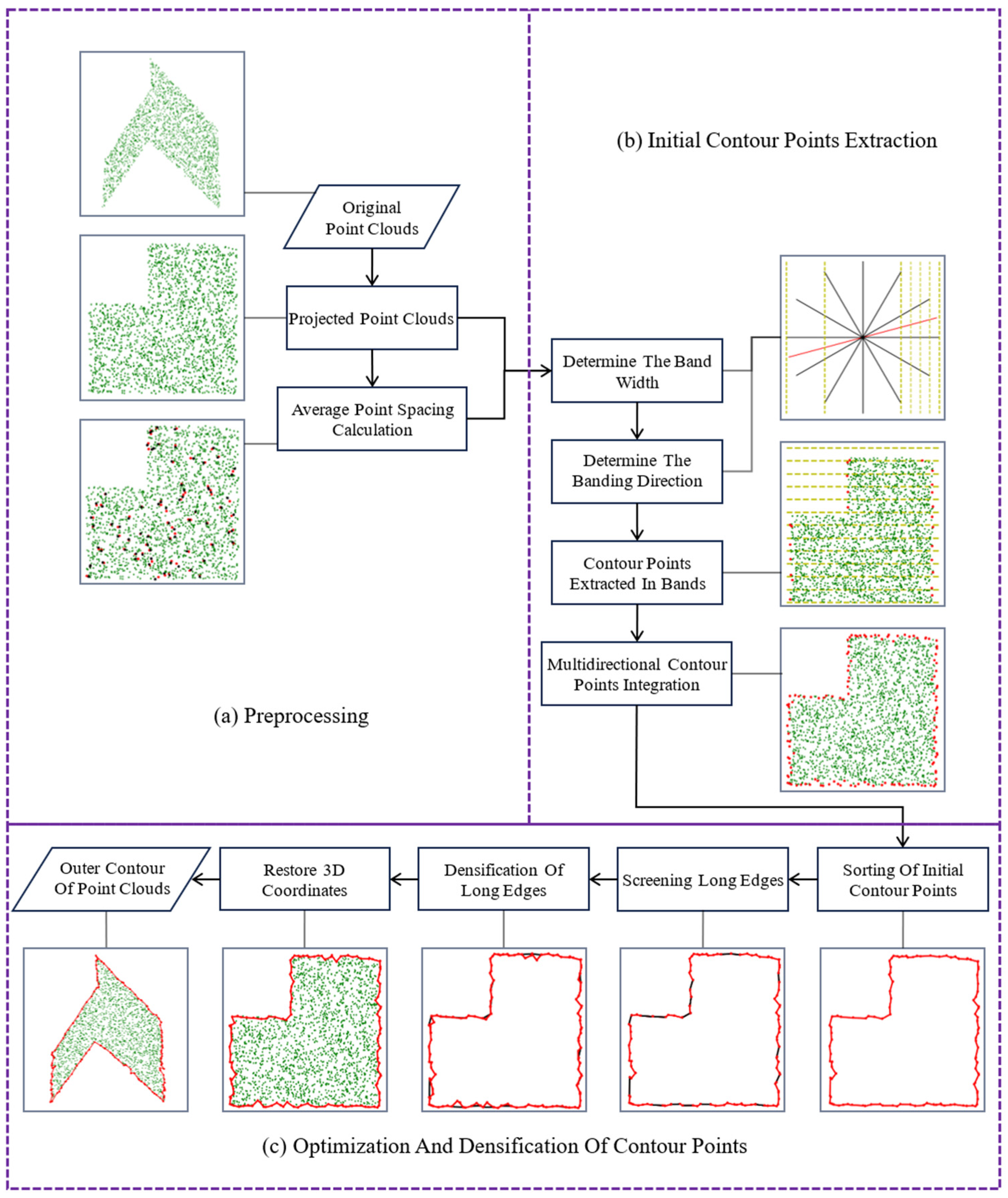
2. Methods
2.1. Point Clouds Outer Contour Extraction Based on Banding
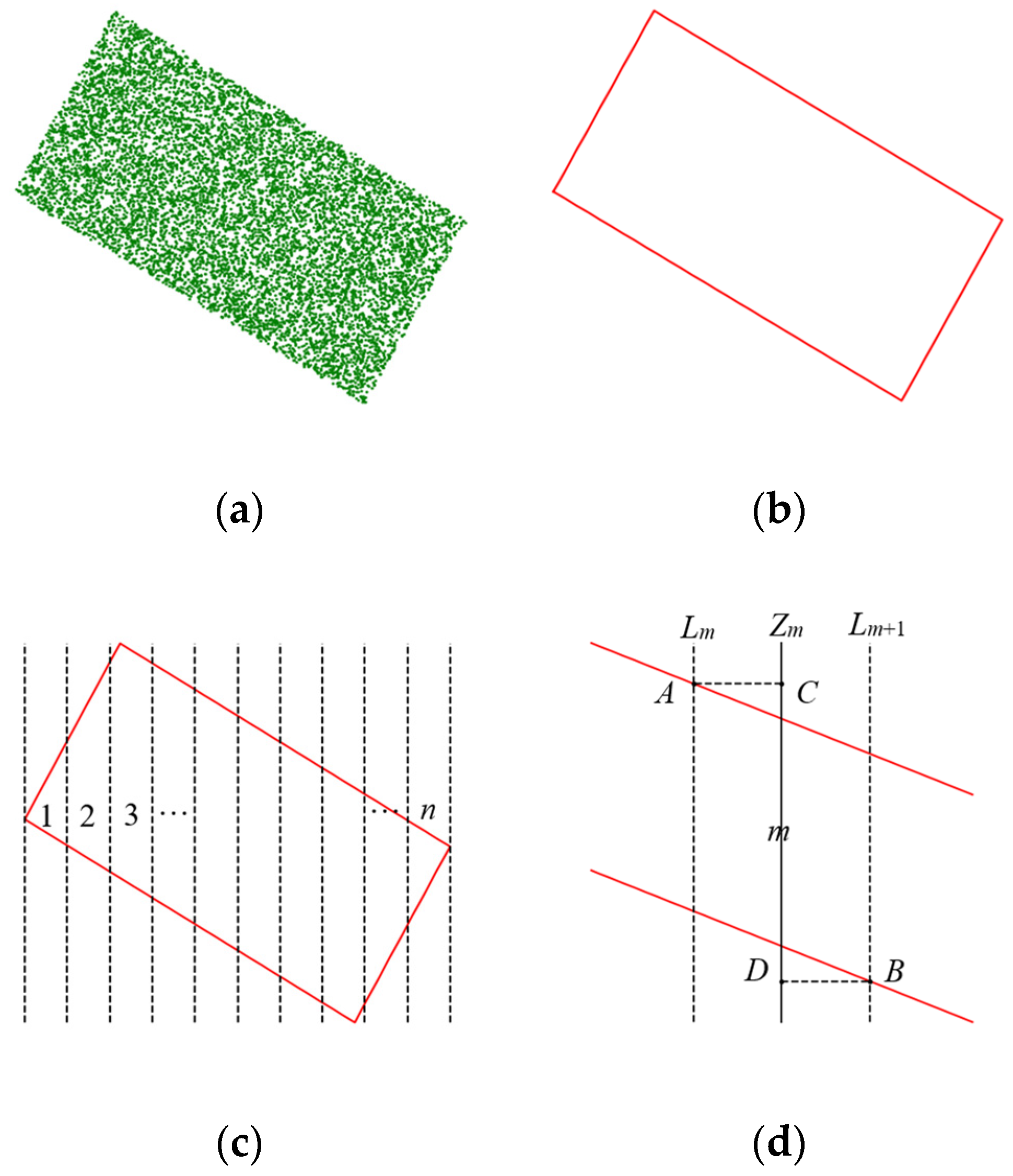
2.1.1. Contour Points Extraction Based on Single-Direction Banding
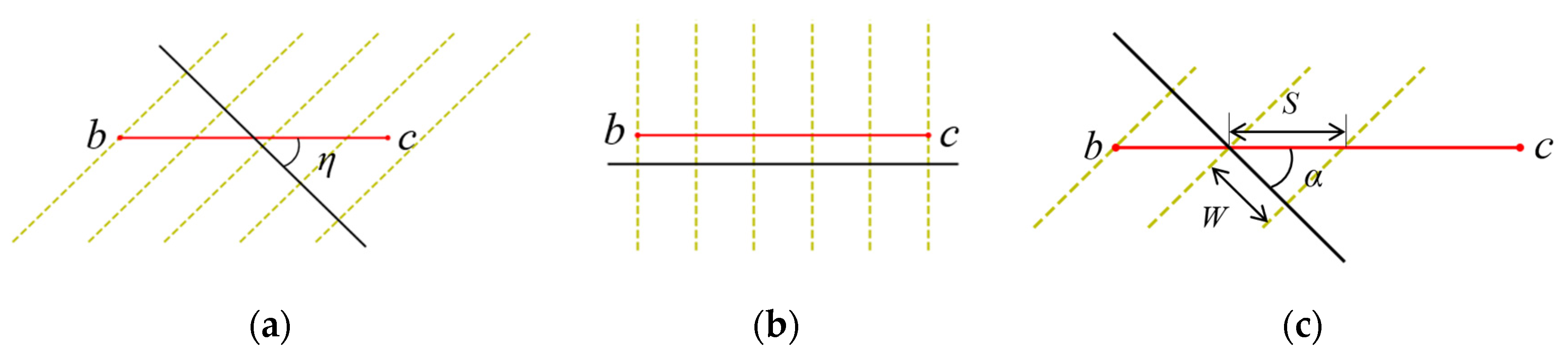
- For any band m, as shown in Figure 2d, m∈1, 2, …, n; Lm and Lm+1 are the left and right banding boundaries of the m-th band, respectively; and Zm is the central axis in the m-th band;
- All points in the m-th band are perpendicularly projected onto the central axis, Zm, to obtain a point set of the projected points, which is denoted as Pm;
- The two points with the farthest distance in Pm are marked as C and D, respectively, and the two points A and B in the m-th band corresponding to the two points C and D are marked as contour points belonging to the m-th band;
- All bands of the point cloud in this area are traversed, the above steps are repeated for each band, all extracted contour points in each band are added to the contour point set Q, and all contour points extracted from the point cloud in this area under single-direction banding are finally obtained.
2.1.2. Determination of Band Width
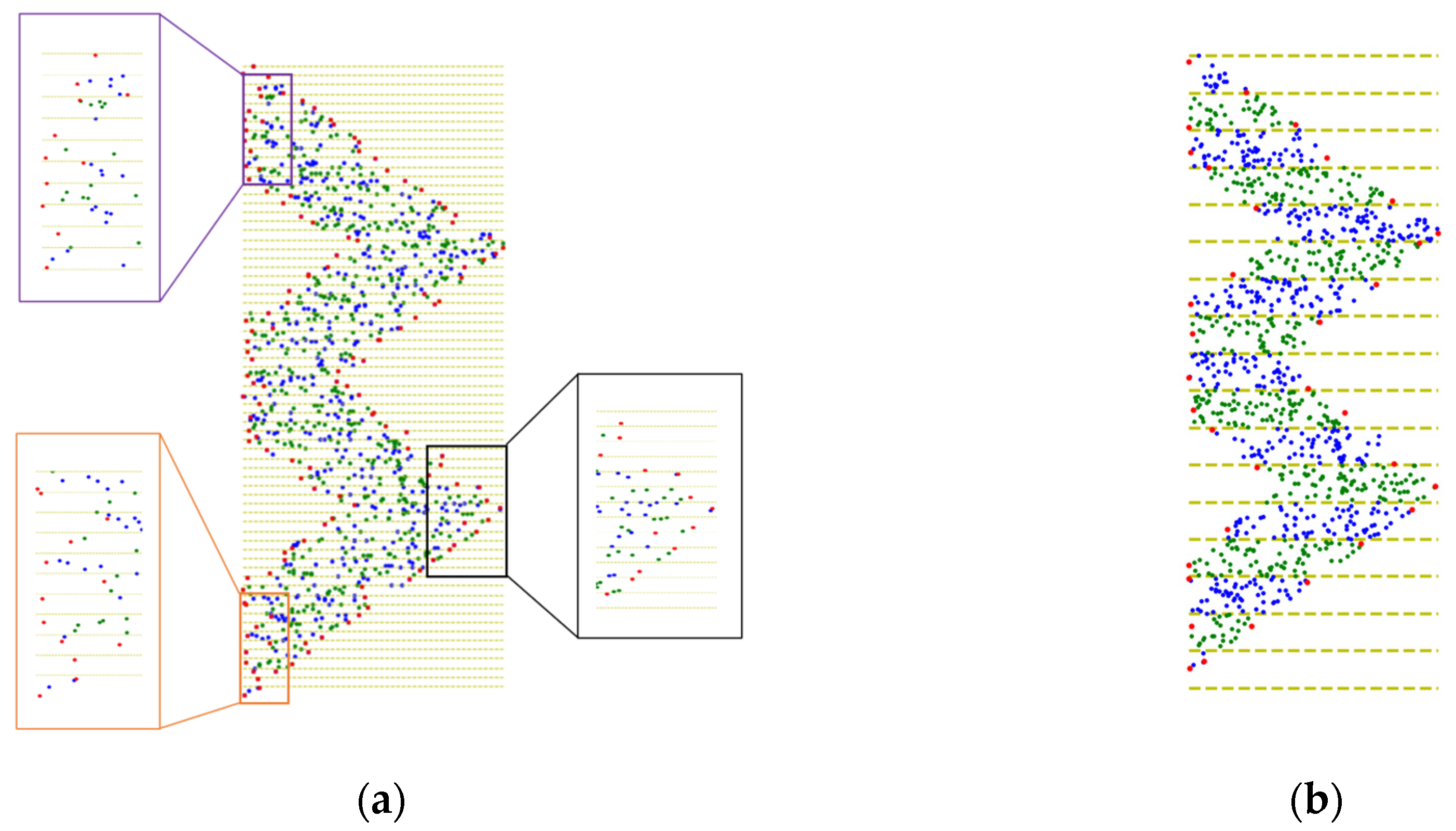
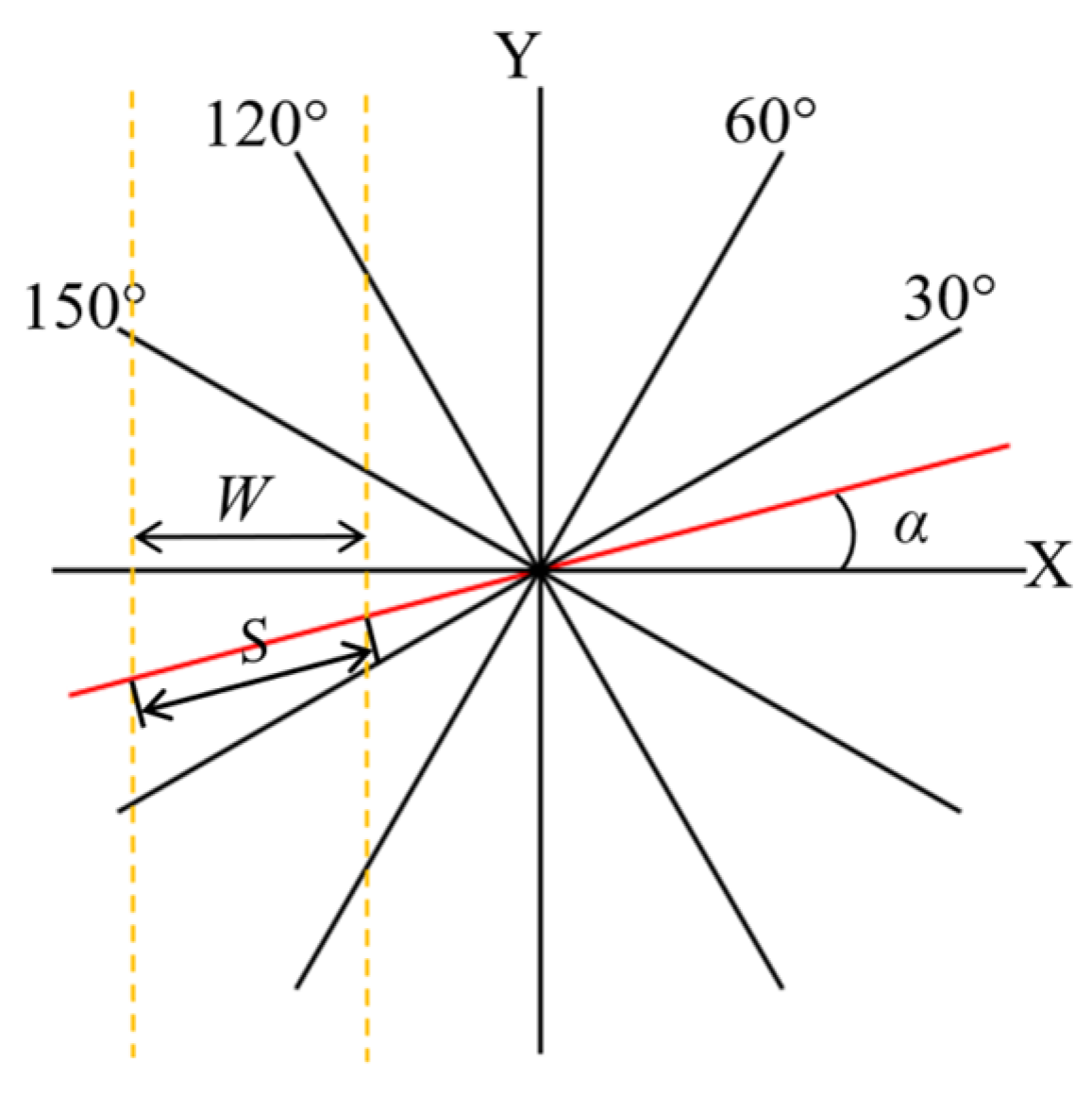
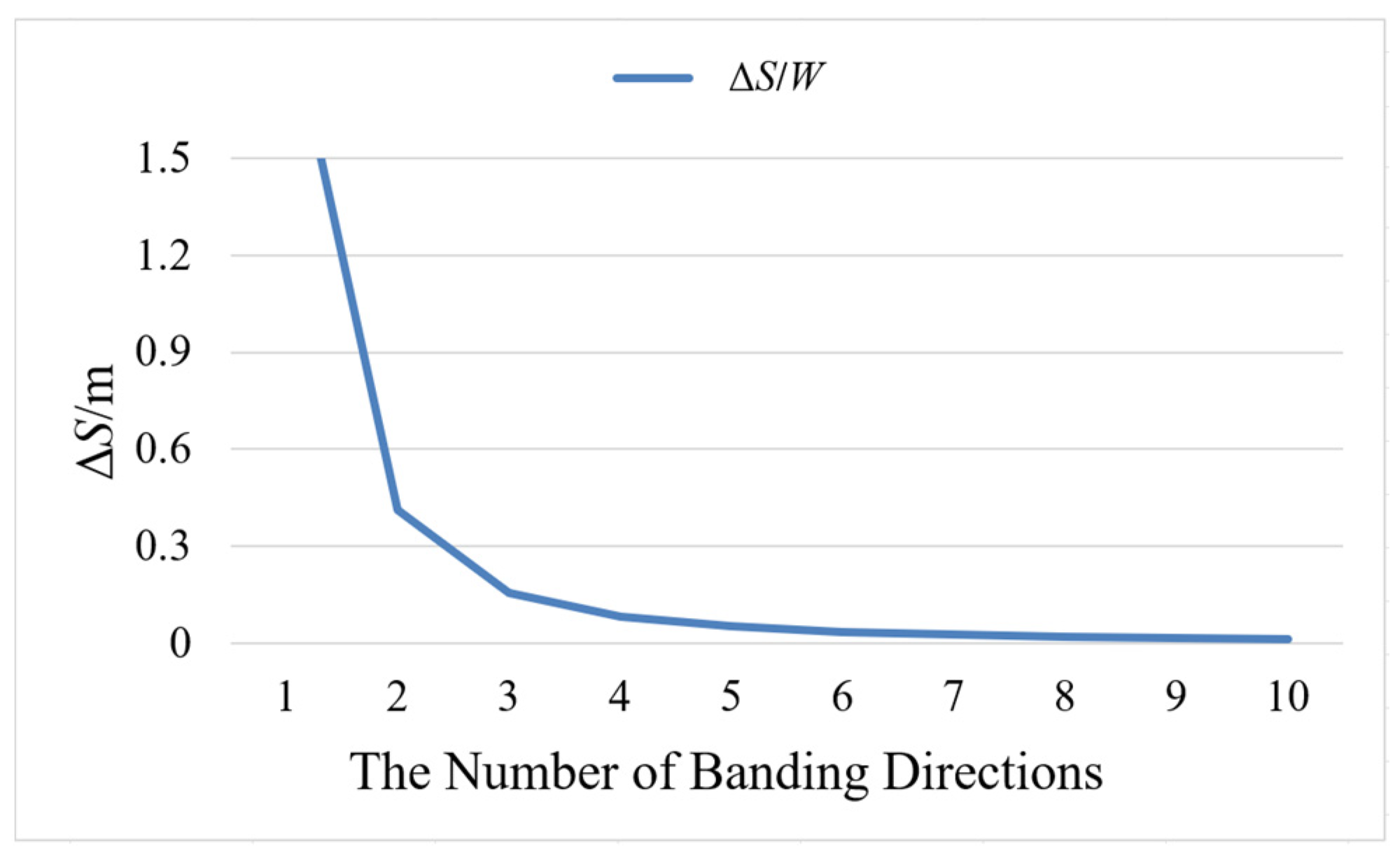
2.1.3. Determination of Banding Direction
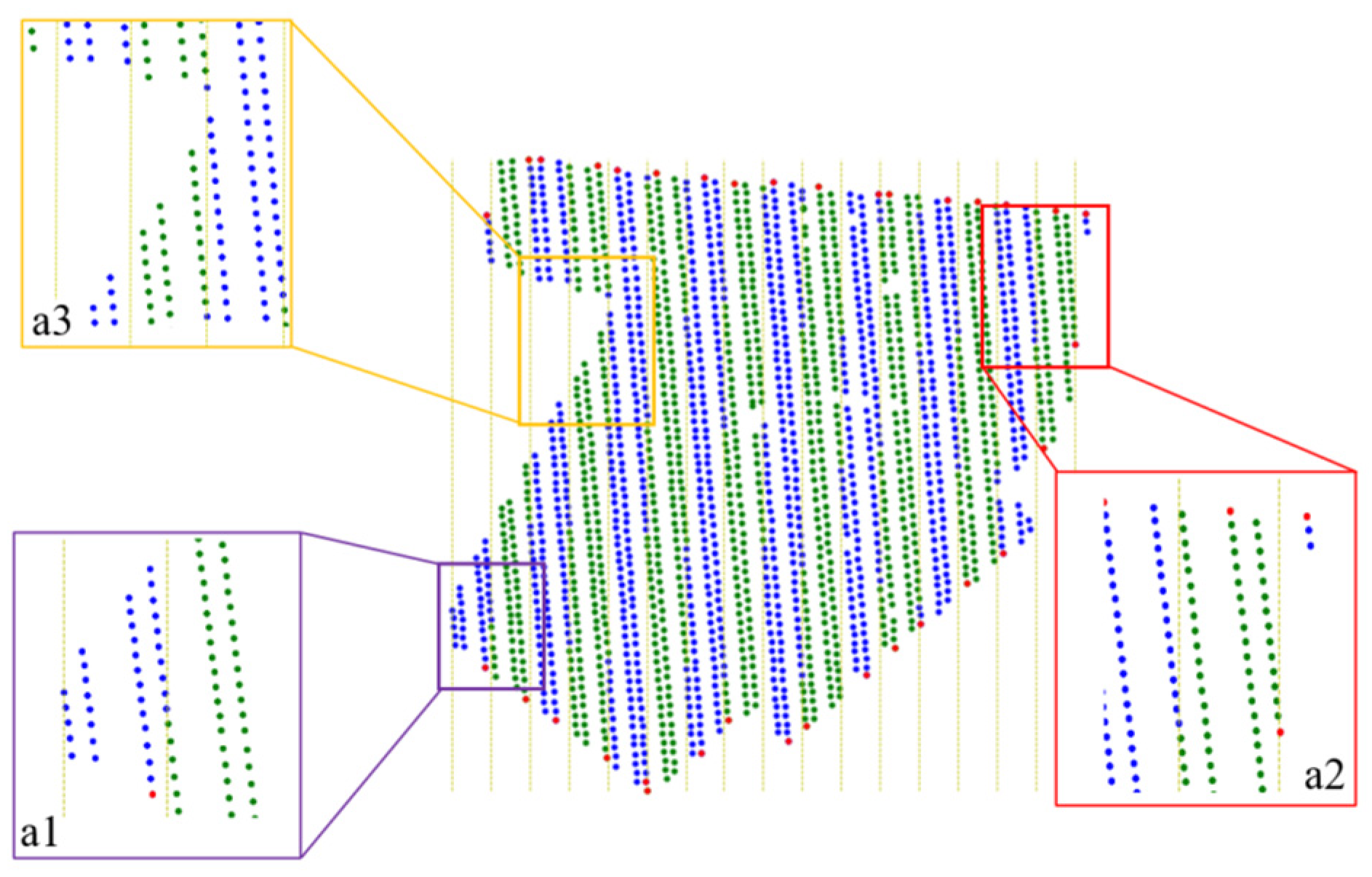
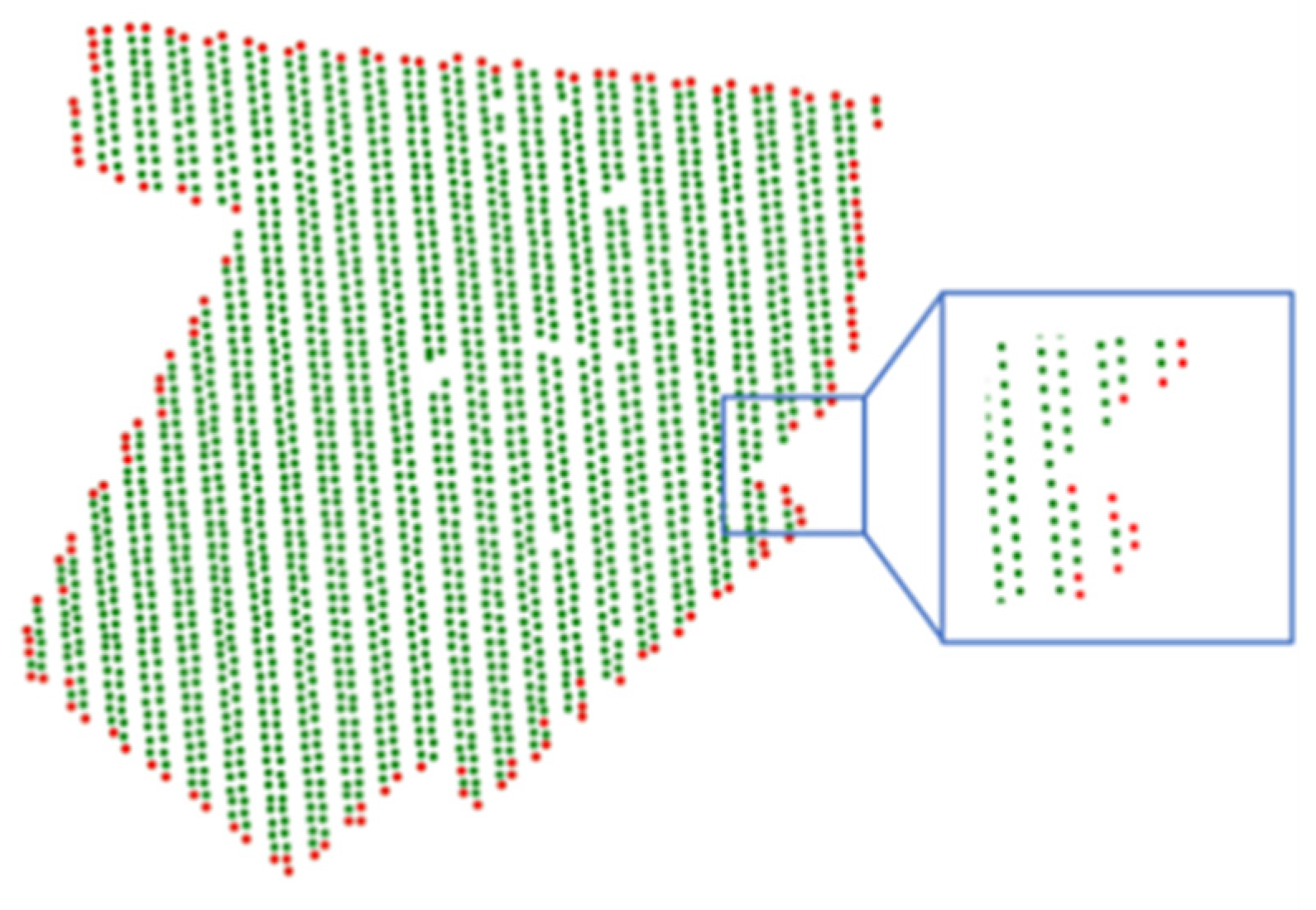
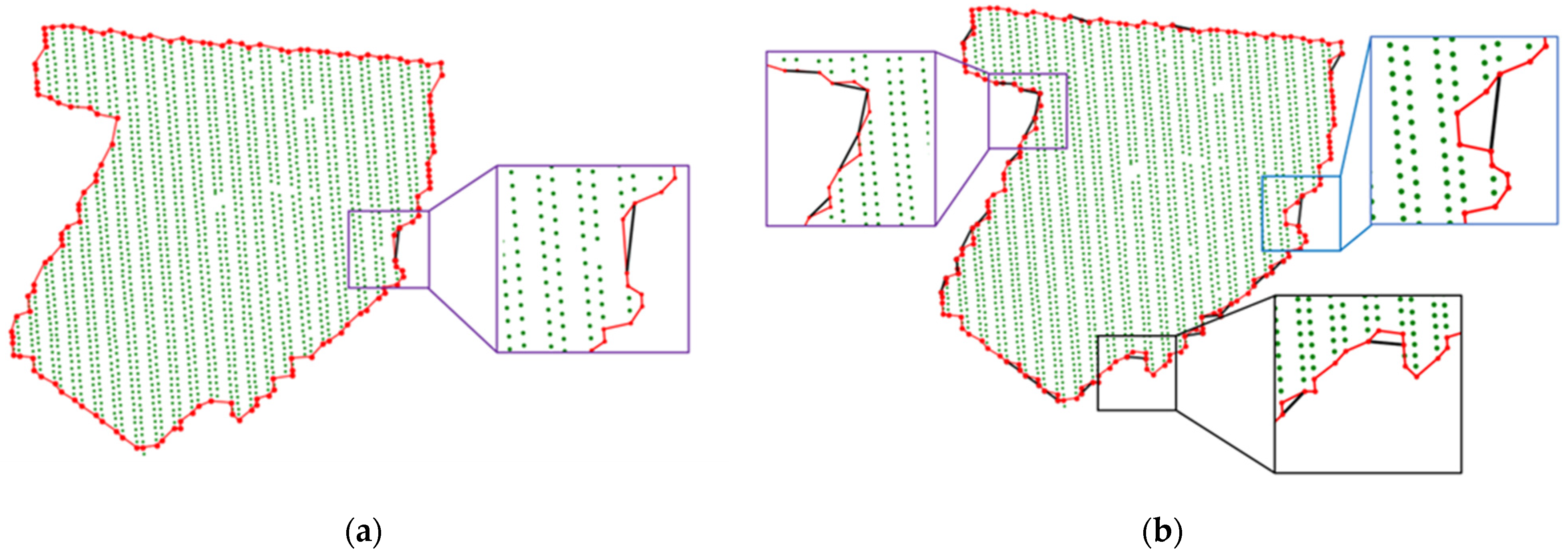
- When a contour line of the original point cloud is perpendicular or nearly perpendicular to the banding direction, if all points on the contour line exist in a band, and only two points, at most, in the whole band can be marked as contour points, some contour points will be missed, which results in too few contour points on the contour line approximately perpendicular to the banding direction, as shown in areas a1 and a2 in Figure 5;
- Given the local concave contour of the original point cloud, when the concave area is located in the middle of a single band after banding, the farthest distance between the projected points is generated by projecting the points located on both sides, which will lead to a wide range of missing results in the contour point extraction of the concave area under single-direction banding conditions, as shown in area a3 in Figure 5.
2.2. Densification and Optimization of Initial Contour Points
2.2.1. Sorting of Contour Points
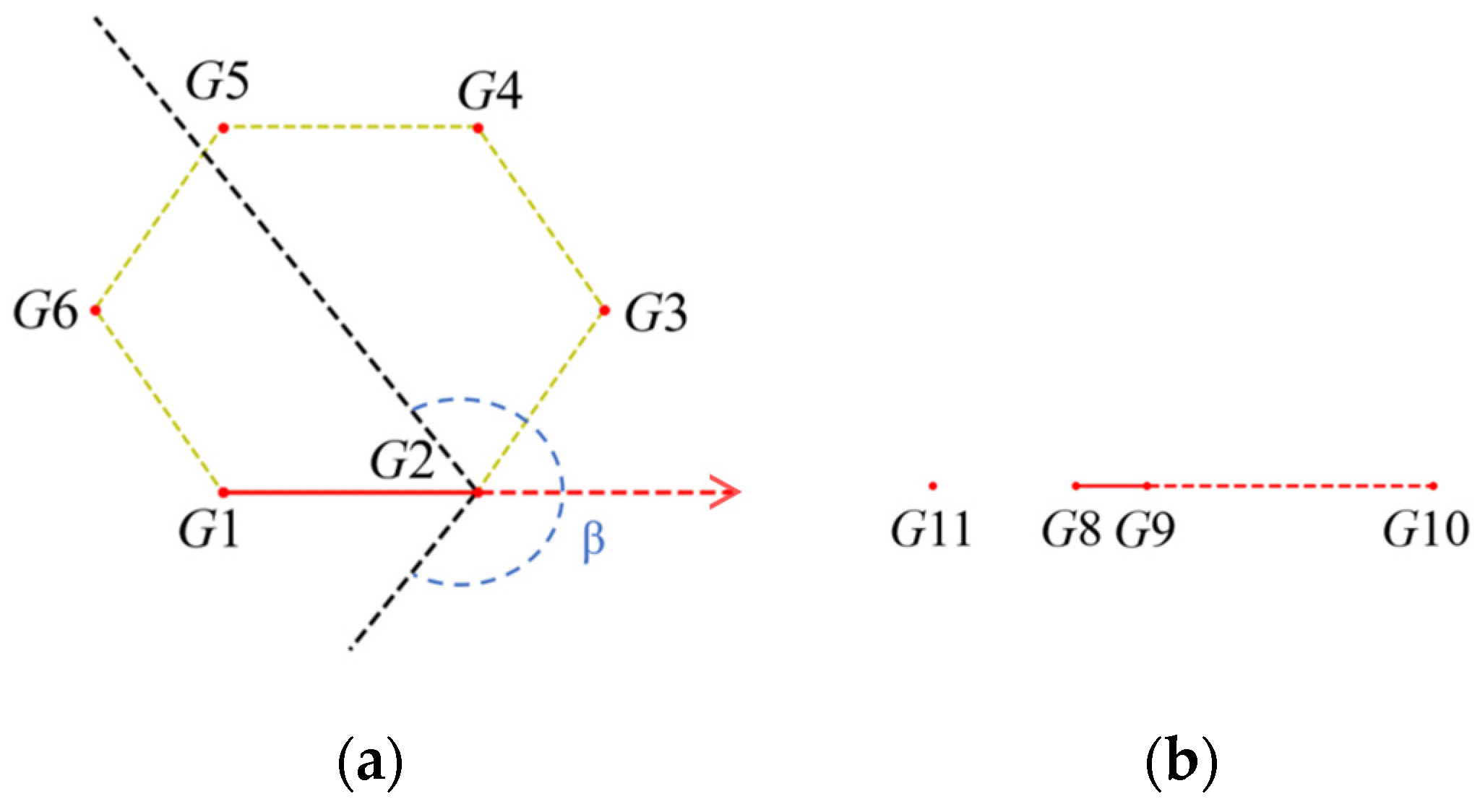
- First, j = 0 is set, a starting point for the contour line search is randomly selected from the initial contour point set G and recorded as Gj, and it serves as the current searching point and is removed from the point set G;
- The point nearest to the current searching point Gj is found in the residual contour points of the point set G and recorded as Gj+1. Gj+1 is then added into the contour line and connected to Gj. The direction from Gj to Gj+1 is the positive direction of the searching line segment, as indicated by the direction of the red, dotted line in Figure 10a;
- Then, j = j+1 is set, and the current searching point Gj is updated, i.e., the point newly added to the contour line is regarded as the current searching point and removed from the point set G;
- Steps (2)–(3) are repeated until the point set Gj is empty, and the point finally added to the contour line is connected to the starting point to obtain a closed contour line.
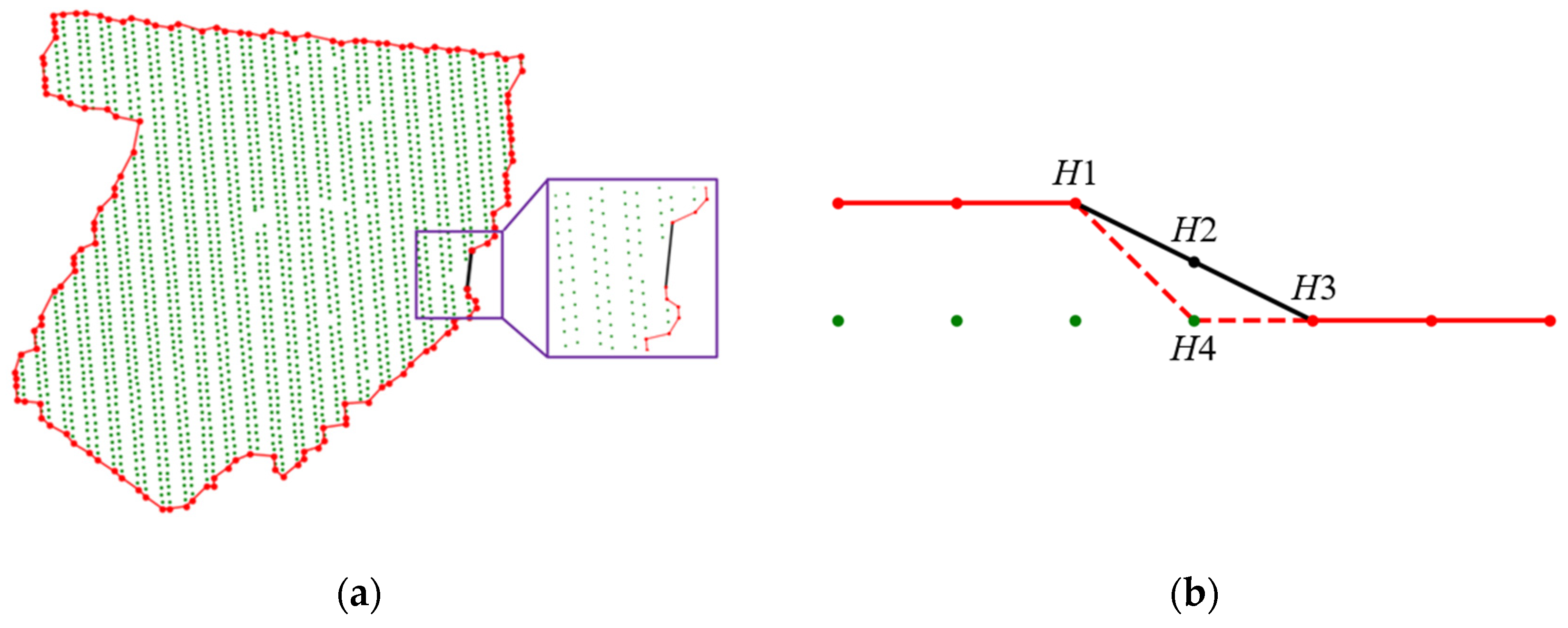
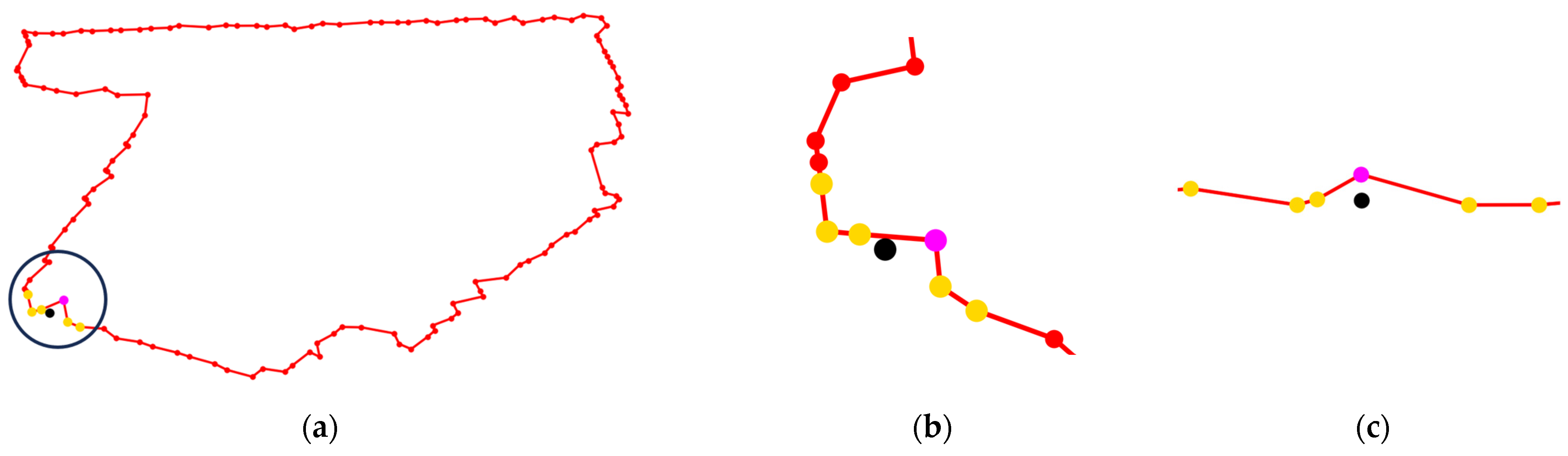
2.2.2. Optimization and Densification of Long Edges
3. Experiment Results and Analysis
3.1. Experimental Data
3.2. Results and Analysis
3.2.1. Comparative Analysis of Extraction Results under Different T Values
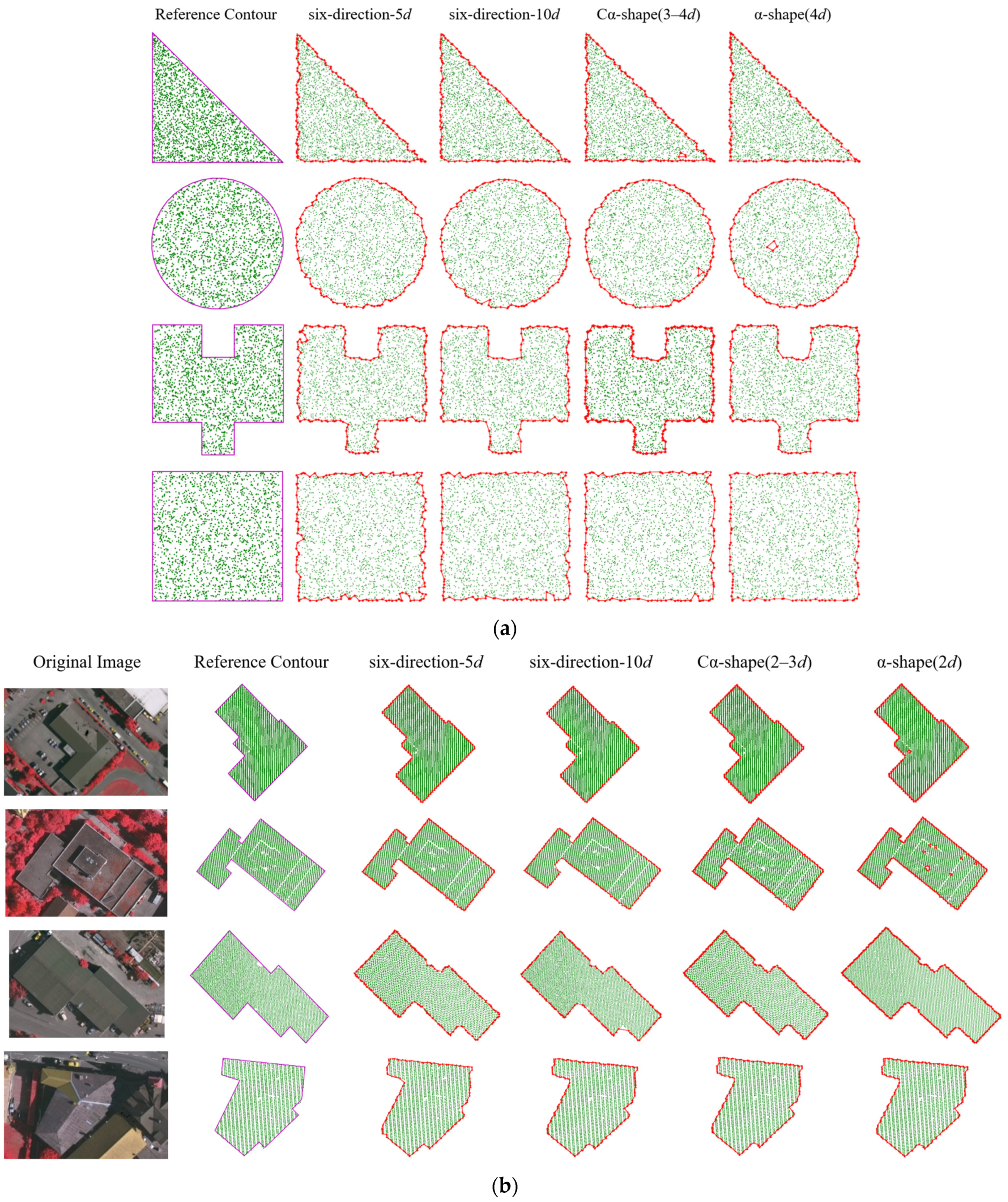
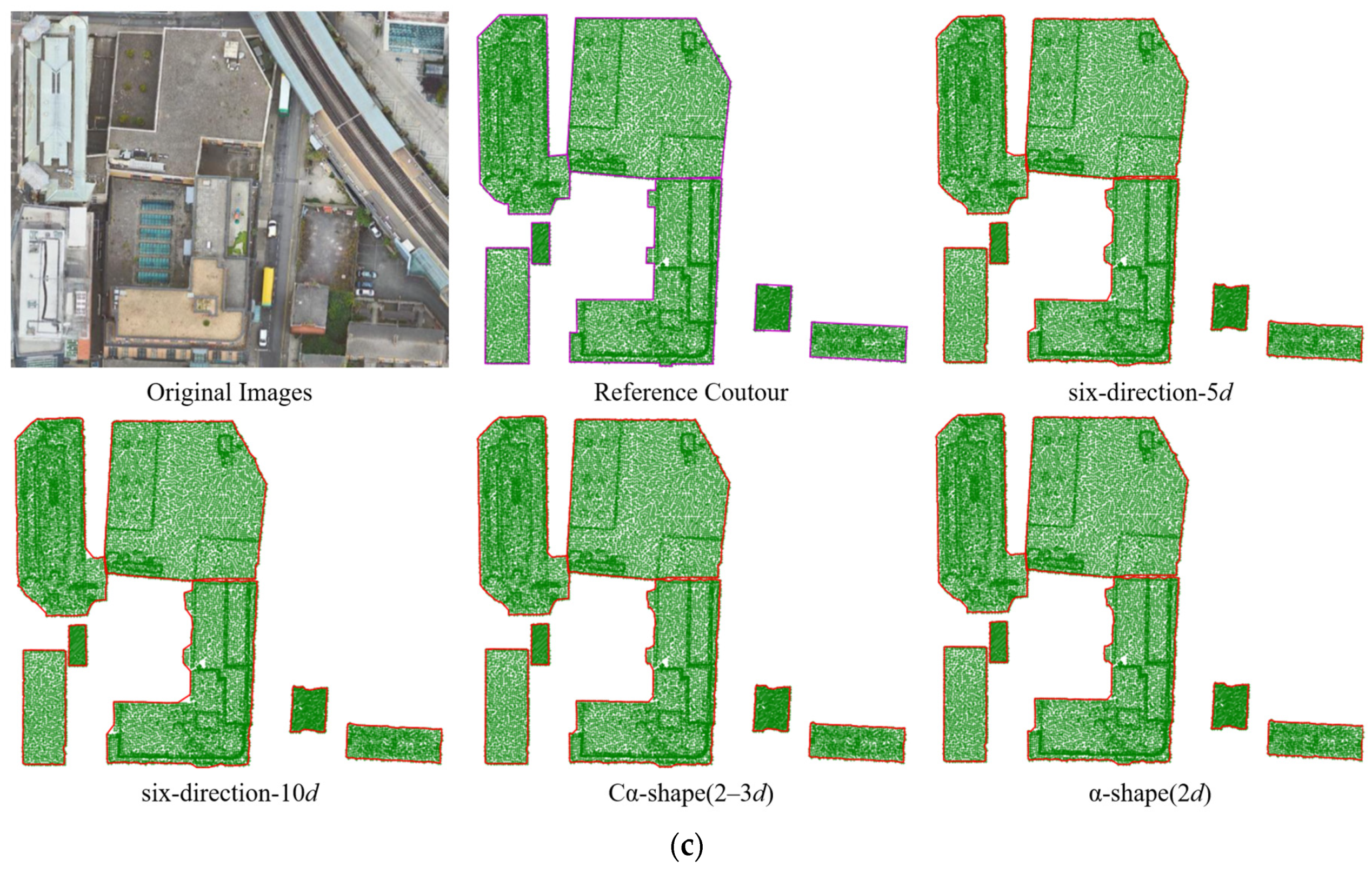
3.2.2. Qualitative Analysis of Contour Line Extraction Results
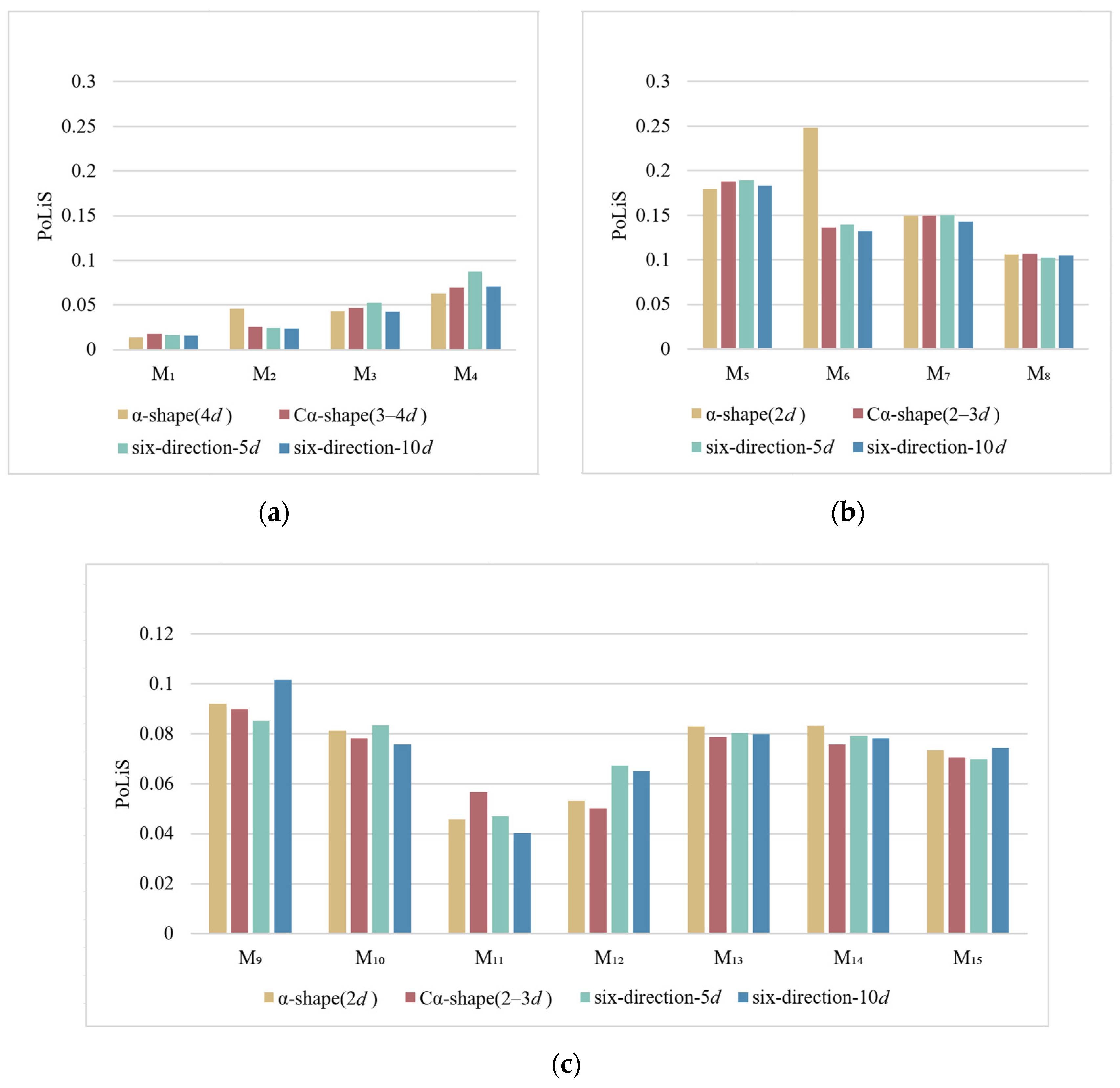
3.2.3. Quantitative Analysis of Contour Line Extraction Results
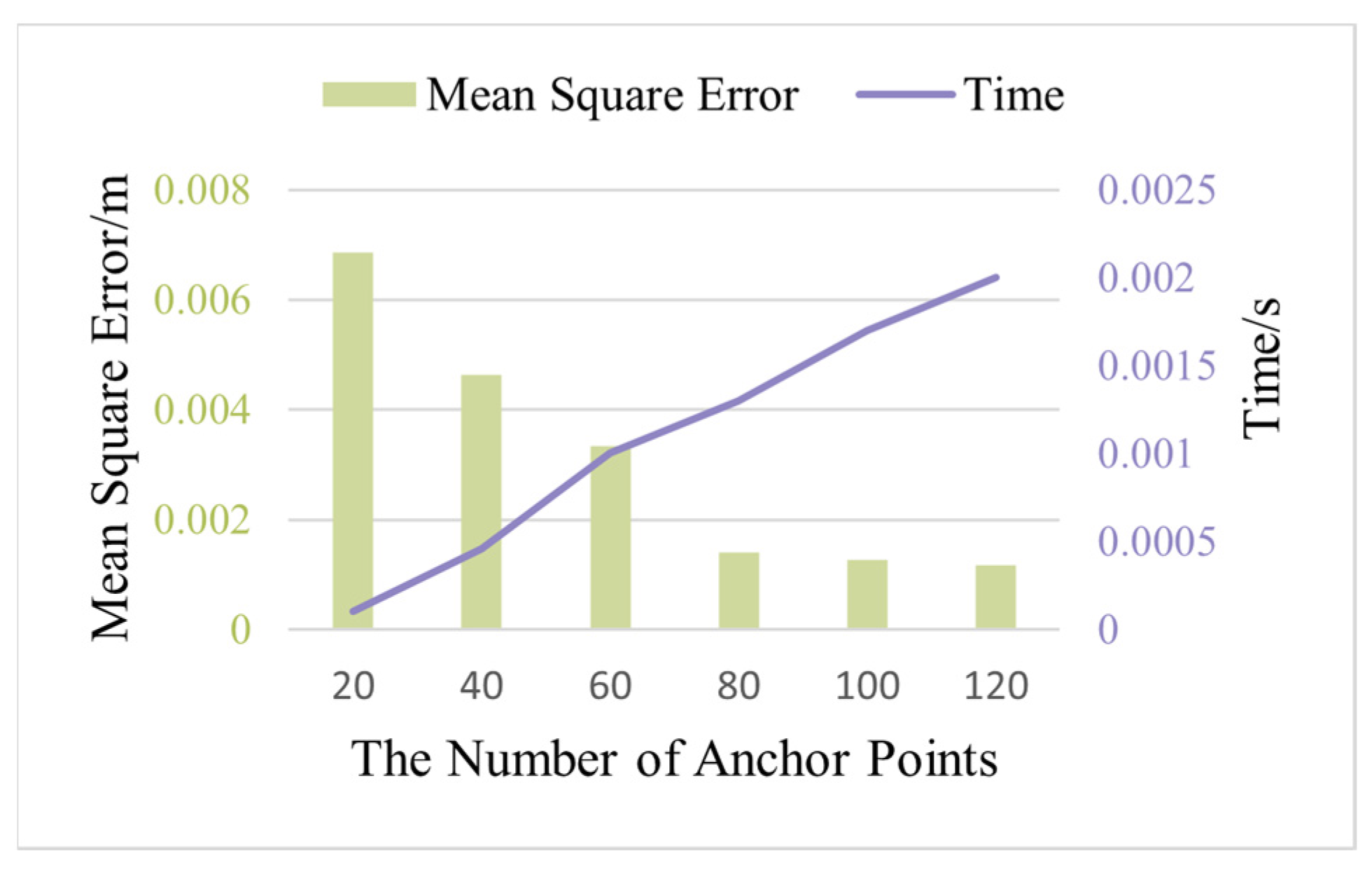
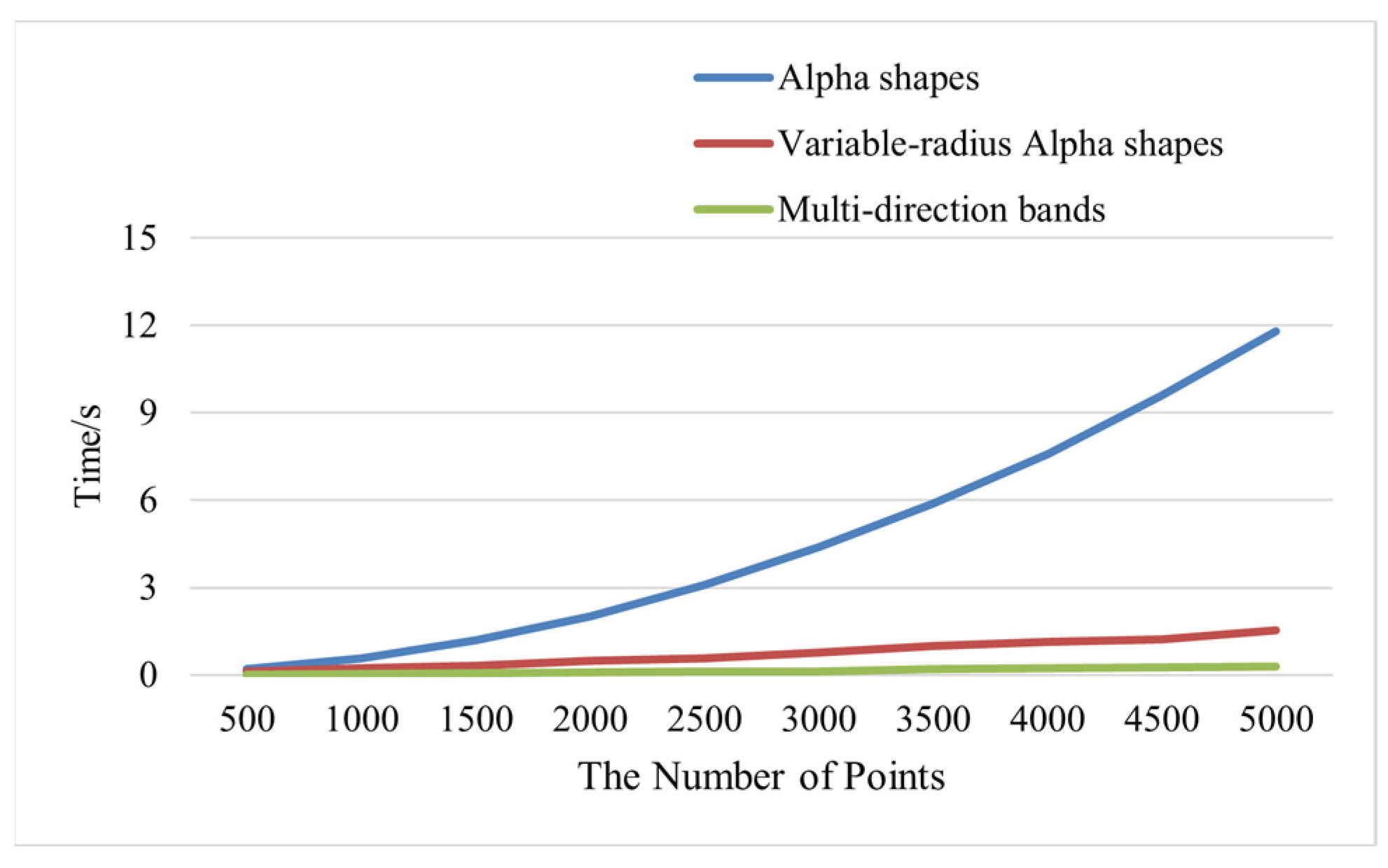
3.2.4. Analysis of Algorithm Running Efficiency
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, B.; Chen, X.; Hua, X.; Xuan, W.; Lichti, D.D. Completing Point Clouds Using Structural Constraints for Large-scale Points Absence in 3D Building Reconstruction. ISPRS-J. Photogramm. Remote Sens. 2023, 204, 163–183. [Google Scholar] [CrossRef]
- Ma, X.; Zheng, G.; Xu, C.; Yang, L.; Geng, Q.; Li, J.; Qiao, Y. Mapping Fine-scale Building Heights in Urban Agglomeration with Spaceborne Lidar. Remote Sens. Environ. 2023, 285, 113392. [Google Scholar] [CrossRef]
- Jochem, A.; Höfle, B.; Rutzinger, M.; Pfeifer, N. Automatic Roof Plane Detection and Analysis in Airborne Lidar Point Clouds for Solar Potential Assessment. Sensors 2009, 9, 5241–5262. [Google Scholar] [CrossRef] [PubMed]
- Sharma, M.; Garg, R.D. Building footprint extraction from aerial photogrammetric point cloud data using its geometric features. J. Build. Eng. 2023, 76, 107387. [Google Scholar] [CrossRef]
- Liu, X.; Ma, Q.; Wu, X.; Hu, T.; Liu, Z.; Liu, L.; Guo, Q.; Su, Y. A Novel Entropy-based Method to Quantify Forest Canopy Structural Complexity from Multiplatform Lidar Point Clouds. Remote Sens. Environ. 2022, 282, 113280. [Google Scholar] [CrossRef]
- Zhang, Z.; Da, F. Self-supervised Latent Feature Learning for Partial Point Clouds Recognition. Pattern Recognit. Lett. 2023, 176, 49–55. [Google Scholar] [CrossRef]
- Feng, M.; Zhang, T.; Li, S.; Jin, G. An Improved Minimum Bounding Rectangle Algorithm for Regularized Building Boundary Extraction from Aerial LiDAR Point Clouds with Partial Occlusions. Int. J. Remote Sens. 2020, 41, 300–319. [Google Scholar] [CrossRef]
- Kwak, E.; Habib, A. Automatic Representation and Reconstruction of DBM from LiDAR Data Using Recursive Minimum Bounding Rectangle. ISPRS-J. Photogramm. Remote Sens. 2014, 93, 171–191. [Google Scholar] [CrossRef]
- Chaudhuri, D.; Samal, A. A Simple Method for Fitting of Bounding Rectangle to Closed Regions. Pattern Recognit. 2007, 40, 1981–1989. [Google Scholar] [CrossRef]
- Mahphood, A.; Arefi, H. Grid-based Building Outline Extraction from Ready-made Building Points. Autom. Constr. 2022, 139, 104321. [Google Scholar] [CrossRef]
- Miao, Y.; Peng, C.; Wang, L.; Qiu, R.; Li, H.; Zhang, M. Measurement Method of Maize Morphological Parameters based on Point Cloud Image Conversion. Comput. Electron. Agric. 2022, 199, 107174. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, M.; Li, G.; Li, J.; Zheng, L.; Zhang, M.; Wang, M. Multi-phenotypic Parameters Extraction and Biomass Estimation for Lettuce Based on Point Clouds. Measurement 2022, 204, 112094. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, X.; Guan, H.; Yin, J.; Duan, F.; Zhang, S.; Qv, W. A depth map fusion algorithm with improved efficiency considering pixel region prediction. ISPRS-J. Photogramm. Remote Sens. 2023, 202, 356–368. [Google Scholar] [CrossRef]
- Pu, S.; Vosselman, G. Knowledge based reconstruction of building models from terrestrial laser scanning data. ISPRS-J. Photogramm. Remote Sens. 2009, 64, 575–584. [Google Scholar] [CrossRef]
- Kim, M.; Lee, Q.; Kim, T.; Oh, S.; Cho, H. Automated extraction of geometric primitives with solid lines from unstructured point clouds for creating digital buildings models. Autom. Constr. 2023, 145, 104642. [Google Scholar] [CrossRef]
- Hui, Z.; Hu, H.; Li, N.; Li, Z. Improved Alpha-shapes Building Profile Extraction Algorithm. Laser Optoelectron. Prog. 2022, 59, 447–455. [Google Scholar]
- Wu, Y.; Wang, L.; Hu, C.; Cheng, L. Extraction of building contours from airborne LiDAR point cloud using variable radius Alpha Shapes method. J. Image Graph. 2021, 26, 910–923. (In Chinese) [Google Scholar]
- Dos Santos, R.C.; Galo, M.; Carrilho, A.C. Extraction of Building Roof Boundaries From LiDAR Data Using an Adaptive Alpha-Shape Algorithm. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1289–1293. [Google Scholar] [CrossRef]
- Widyaningrum, E.; Peters, R.Y.; Lindenbergh, R.C. Building Outline Extraction from ALS Point Clouds Using Medial Axis Transform Descriptors. Pattern Recognit. 2020, 106, 107447. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating Forest Structural Attributes Using UAV-LiDAR Data in Ginkgo Plantations. ISPRS-J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Li, Y.; Li, L.; Li, D.; Yang, F.; Liu, Y. A Density-Based Clustering Method for Urban Scene Mobile Laser Scanning Data Segmentation. Remote Sens. 2017, 9, 331. [Google Scholar] [CrossRef]
- Estornell, J.; Hadas, E.; Martí, J.; López-Cortés, I. Tree Extraction and Estimation of Walnut Structure Parameters Using Airborne LiDAR Data. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102273. [Google Scholar] [CrossRef]
- Li, L.; Song, N.; Sun, F.; Liu, X.; Wang, R.; Yao, J.; Cao, S. Point2Roof: End-to-end 3D Building Roof Modeling from Airborne LiDAR Point Clouds. ISPRS-J. Photogramm. Remote Sens. 2022, 193, 17–28. [Google Scholar] [CrossRef]
- Zhao, C.; Gai, H.; Wang, Y.; Lu, J.; Yu, D.; Lin, Y. Building Outer Boundary Extraction from ALS Point Clouds Using Neighbor Point Direction Distribution. Opt. Precis. Eng. 2021, 29, 374–387. (In Chinese) [Google Scholar] [CrossRef]
- Guillaume, C.; Justine, B.; Nicolas, R.; Dmitry, S. Parametric Surface Fitting on Airborne Lidar Point Clouds for Building Reconstruction. Comput.-Aided Des. 2021, 140, 103090. [Google Scholar]
- Vanian, V.; Zamanakos, G.; Pratikakis, I. Improving Performance of Deep Learning Models for 3D Point Cloud Semantic Segmentation via Attention Mechanisms. Comput. Graph. 2022, 106, 277–287. [Google Scholar] [CrossRef]
- Sun, S.; Salvaggio, C. Aerial 3D Building Detection and Modeling From Airborne LiDAR Point Clouds. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2013, 6, 1440–1449. [Google Scholar] [CrossRef]
- Wang, R.; Peethambaran, J.; Chen, D. LiDAR Point Clouds to 3D Urban Models A Review. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 11, 606–627. [Google Scholar] [CrossRef]
- Aijazi, A.K.; Checchin, P.; Trassoudaine, L. Automatic Detection and Feature Estimation of Windows in 3D Urban Point Clouds Exploiting Faade Symmetry and Temporal Correspondences. Int. J. Remote Sens. 2014, 35, 7726–7748. [Google Scholar] [CrossRef]
- Zhu, J.; Yue, X.; Huang, J.; Huang, Z. Intelligent Point Cloud Edge Detection Method Based on Projection Transformation. Wirel. Commun. Mob. Comput. 2021, 2021, 2706462. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Fraser, C.S. An Automatic and Threshold-Free Performance Evaluation System for Building Extraction Techniques From Airborne LIDAR Data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 4184–4198. [Google Scholar] [CrossRef]
- Himeur, C.E.; Lejemble, T.; Pellegrini, T.; Paulin, M. PCEDNet: A Lightweight Neural Network for Fast and Interactive Edge Detection in 3D Point Clouds. ACM Trans. Graph. 2021, 41, 1–21. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Z.; Liu, T.; Peng, B.; Li, X.; Zhang, Q. Large-Scale Point Cloud Contour Extraction via 3-D-Guided Multiconditional Residual Generative Adversarial Network. IEEE Geosci. Remote Sens. Lett. 2020, 164, 97–105. [Google Scholar] [CrossRef]
- Bao, T.; Zhao, J.; Xu, M. Step Edge Detection Method for 3D Point Clouds Based on 2D Range Images. Optik 2015, 126, 2706–2710. [Google Scholar] [CrossRef]
- Li, Y.; Wu, H.; An, R.; Xu, H.; He, Q.; Xu, J. An Improved Building Boundary Extraction Algorithm Based on Fusion of Optical Imagery and LIDAR Data. Optik 2013, 123, 5357–5362. [Google Scholar] [CrossRef]
- Marcato, V.J.; Poz, A.D. Extraction of Building Roof Contours from the Integration of High-resolution Aerial Imagery and Laser Data Using Markov Random Fields. Int. J. Image Data Fusion. 2018, 9, 263–286. [Google Scholar]
- Sharma, M.; Garg, R.D.; Badenko, V.; Fedotov, A.; Liu, M.; Yao, A. Potential of Airborne LiDAR Data for Terrain Parameters Extraction. Quat. Int. 2021, 575–576, 317–327. [Google Scholar] [CrossRef]
- Yan, W.Y.; Ewijk, K.V.; Treitz, P.; Shaker, A. Effects of Radiometric Correction on Cover Type and Spatial Resolution for Modeling Plot Level Forest Attributes Using Multispectral Airborne LiDAR Data. ISPRS-J. Photogramm. Remote Sens. 2020, 169, 152–165. [Google Scholar] [CrossRef]
- Awrangjeb, M. Using point cloud data to identify, trace and regularize the outlines of buildings. Int. J. Remote Sens. 2016, 37, 551–579. [Google Scholar] [CrossRef]
- Zolanvari, S.M.I.; Ruano, S.; Rana, A.; Cummins, A.; Da Silva, R.E.; Rahbar, M.; Smolic, A. DublinCity: Annotated LiDAR Point Cloud and its Applications. In Proceedings of the 30th British Machine Vision Conference, Wales, UK, 9–12 September 2019; p. 44. [Google Scholar]
- Avbelj, J.; Müller, R.; Bamler, R. A Metric for Polygon Comparison and Building Extraction Evaluation. IEEE Geosci. Remote Sens. Lett. 2015, 12, 170–174. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | 2 | 4 | 6 | 8 | 10 |
|---|---|---|---|---|---|
| Fm | 138 | 70 | 46 | 36 | 28 |
| Fn | 30 | 9 | 2 | 1 | 1 |
| F/% | 21.74 | 12.86 | 4.35 | 2.78 | 3.57 |
| Number of Banding Directions | 1 | 2 | 4 | 6 | 8 | 10 |
|---|---|---|---|---|---|---|
| Value range of α/° | 0~90 | 0~45 | 0~22.5 | 0~15 | 0~11.25 | 0~9 |
| Value range of η/° | 0~90 | 0~90 | 0~90 | 0~90 | 0~90 | 0~90 |
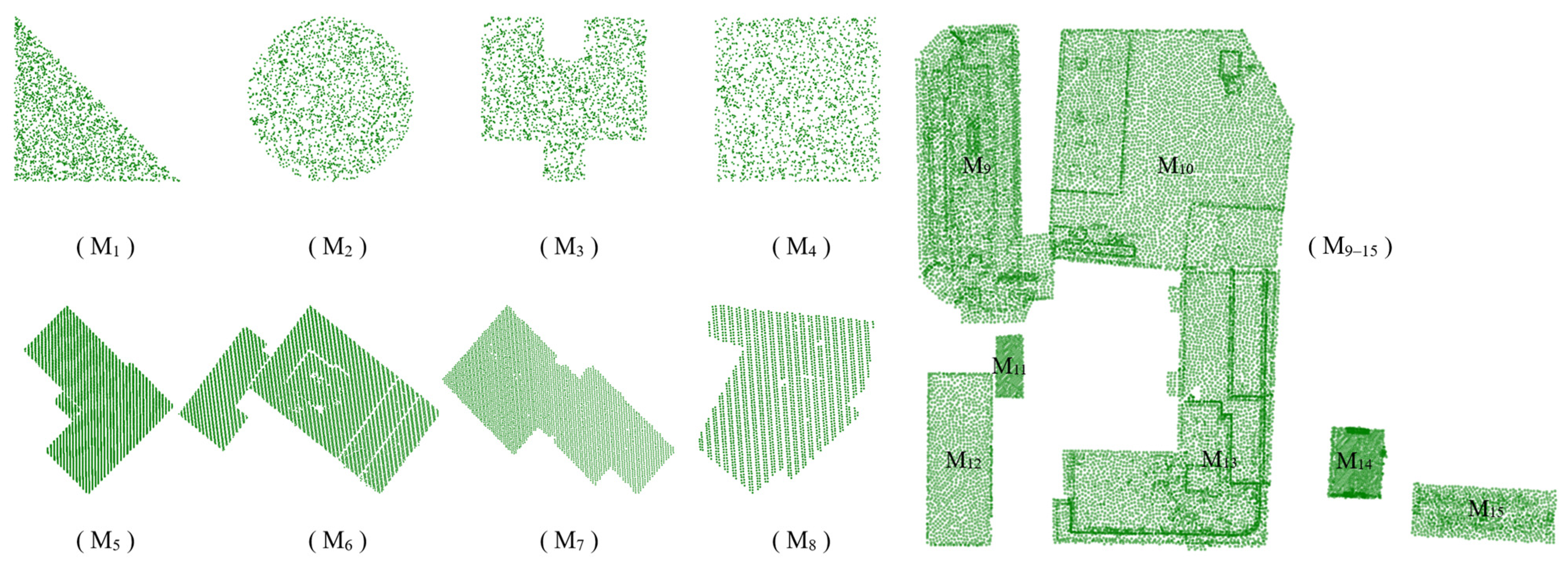
| Original point cloud | M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 |
| Average Point Spacing/m | 0.028 | 0.041 | 0.087 | 0.104 | 0.249 | 0.338 | 0.454 | 0.384 |
| Original point cloud | M9 | M10 | M11 | M12 | M13 | M14 | M15 | |
| Average point spacing/m | 0.506 | 0.490 | 0.327 | 0.508 | 0.485 | 0.308 | 0.486 |
| Six-Directional Banding | Variable-Radius Alpha Shapes | Alpha Shapes | ||
|---|---|---|---|---|
| Dataset 1 | T = 5d | T = 10d | r = 3–4d | r = 4d |
| Dataset 2 | T = 5d | T = 10d | r = 2–3d | r = 2d |
| Dataset 3 | T = 5d | T = 10d | r = 2–3d | r = 2d |
| RAE | α-shape(4d)/% | Cα-shape(3–4d)/% | six-direction-5d/% | six-direction-10d/% |
| M1 | 5.4 | 6.3 | 6.2 | 5.1 |
| M2 | 3.9 | 4.1 | 3.9 | 3.8 |
| M3 | 5.1 | 5.8 | 6.9 | 5.3 |
| M4 | 4.4 | 5.0 | 6.4 | 5.2 |
| RAE | α-shape(2d)/% | Cα-shape(2–3d)/% | six-direction-5d/% | six-direction-10d/% |
| M5 | 4.4 | 4.4 | 4.2 | 3.6 |
| M6 | 3.5 | 3.3 | 3.3 | 2.8 |
| M7 | 2.9 | 2.5 | 2.0 | 1.6 |
| M8 | 2.8 | 2.7 | 2.0 | 1.8 |
| M9 | 2.1 | 2.0 | 1.8 | 1.8 |
| M10 | 1.4 | 1.4 | 1.5 | 1.4 |
| M11 | 5.2 | 5.4 | 5.5 | 4.3 |
| M12 | 2.8 | 2.6 | 2.9 | 2.8 |
| M13 | 2.3 | 2.1 | 1.9 | 1.5 |
| M14 | 6.8 | 6.3 | 6.6 | 6.7 |
| M15 | 4.4 | 4.2 | 4.0 | 4.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Zang, D.; Yu, J.; Xie, X. Extraction of Building Roof Contours from Airborne LiDAR Point Clouds Based on Multidirectional Bands. Remote Sens. 2024, 16, 190. https://doi.org/10.3390/rs16010190
Wang J, Zang D, Yu J, Xie X. Extraction of Building Roof Contours from Airborne LiDAR Point Clouds Based on Multidirectional Bands. Remote Sensing. 2024; 16(1):190. https://doi.org/10.3390/rs16010190
Chicago/Turabian StyleWang, Jingxue, Dongdong Zang, Jinzheng Yu, and Xiao Xie. 2024. "Extraction of Building Roof Contours from Airborne LiDAR Point Clouds Based on Multidirectional Bands" Remote Sensing 16, no. 1: 190. https://doi.org/10.3390/rs16010190
APA StyleWang, J., Zang, D., Yu, J., & Xie, X. (2024). Extraction of Building Roof Contours from Airborne LiDAR Point Clouds Based on Multidirectional Bands. Remote Sensing, 16(1), 190. https://doi.org/10.3390/rs16010190