
UAV-LiDAR Integration with Sentinel-2 Enhances Precision in AGB Estimation for Bamboo Forests



Abstract
:1. Introduction
2. The Study Area and Data Acquisition
2.1. The Study Area
2.2. The Process of Researching and Pre-processing Data
2.2.1. UAV-LiDAR Data Acquisition and Processing
2.2.2. Sentinel-2 Data Acquisition and Processing
2.2.3. Ground Survey Data and AGB Calculations
3. Research Methodology
3.1. UAV-LiDAR Data Feature Variable Settings
3.2. Sentinel-2 Remote Sensing Feature Variable Settings
3.3. Feature Variable Screening Based on Boruta’s Algorithm
3.4. Model Construction Methodology
3.4.1. Multiple Linear Regression Models
3.4.2. Support Vector Regression Model
3.4.3. Random Forest Model
3.5. Evaluation of Model Accuracy
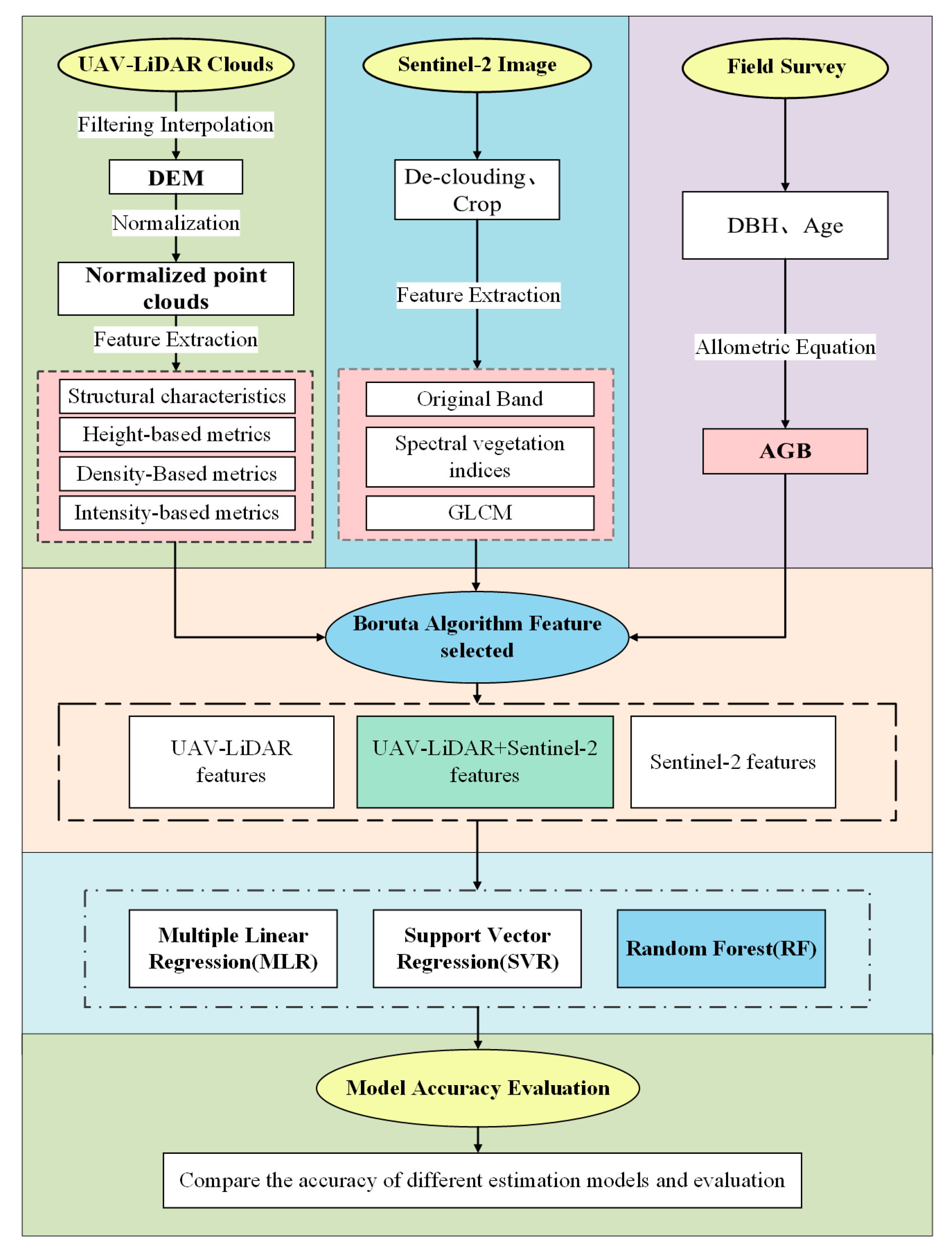
3.6. Technical Routes
4. Results and Analyses
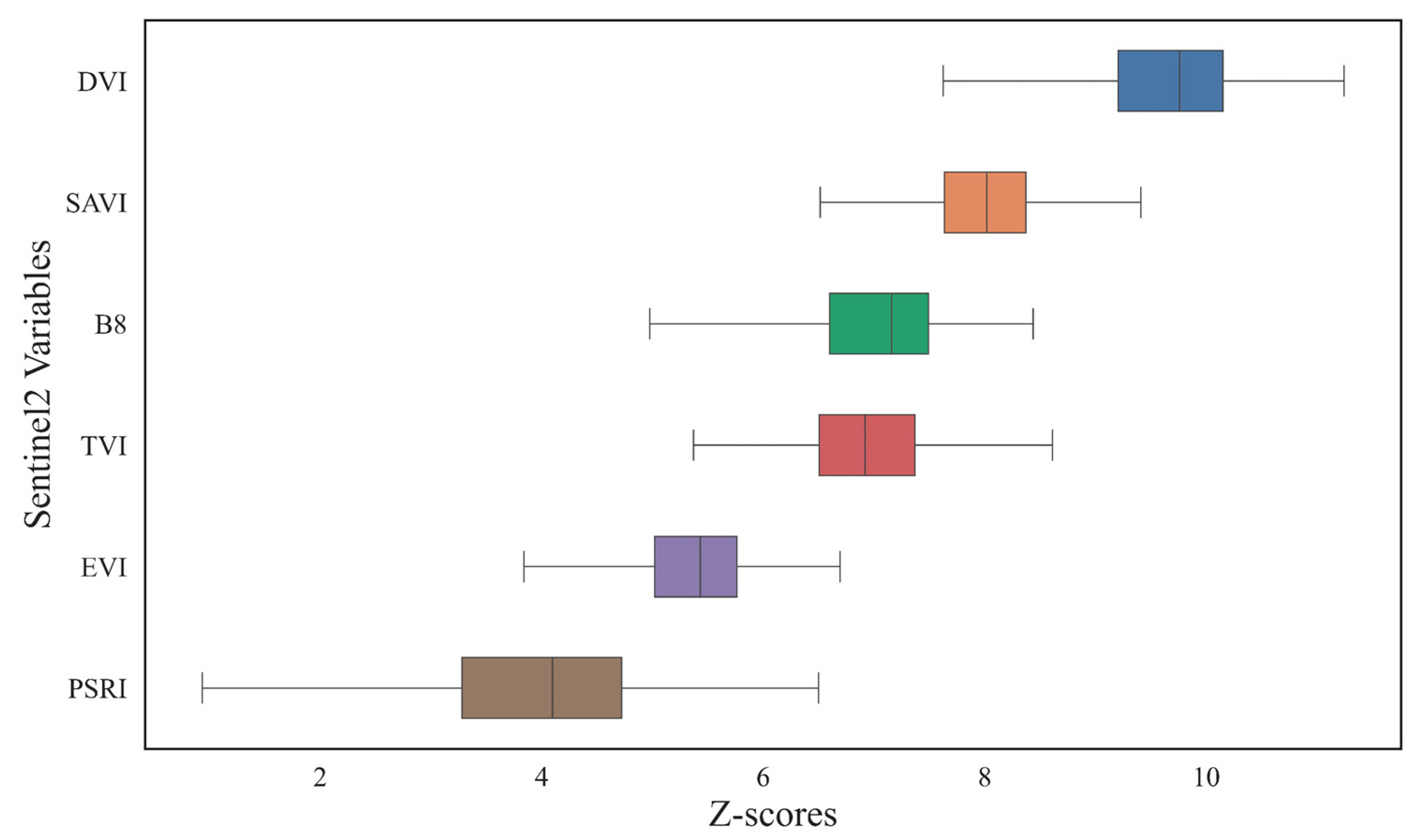
4.1. Importance Analysis and Screening of Characteristic Variables
4.2. Moso Bamboo Forest AGB Modelling Results
4.2.1. The MLR Model
4.2.2. The SVR Model
4.2.3. The RF Model
4.3. Comparative Evaluation of Outcomes in Estimating Aboveground Biomass (AGB)
4.3.1. Comparison of Different Modelling Approaches for the Same Data Source
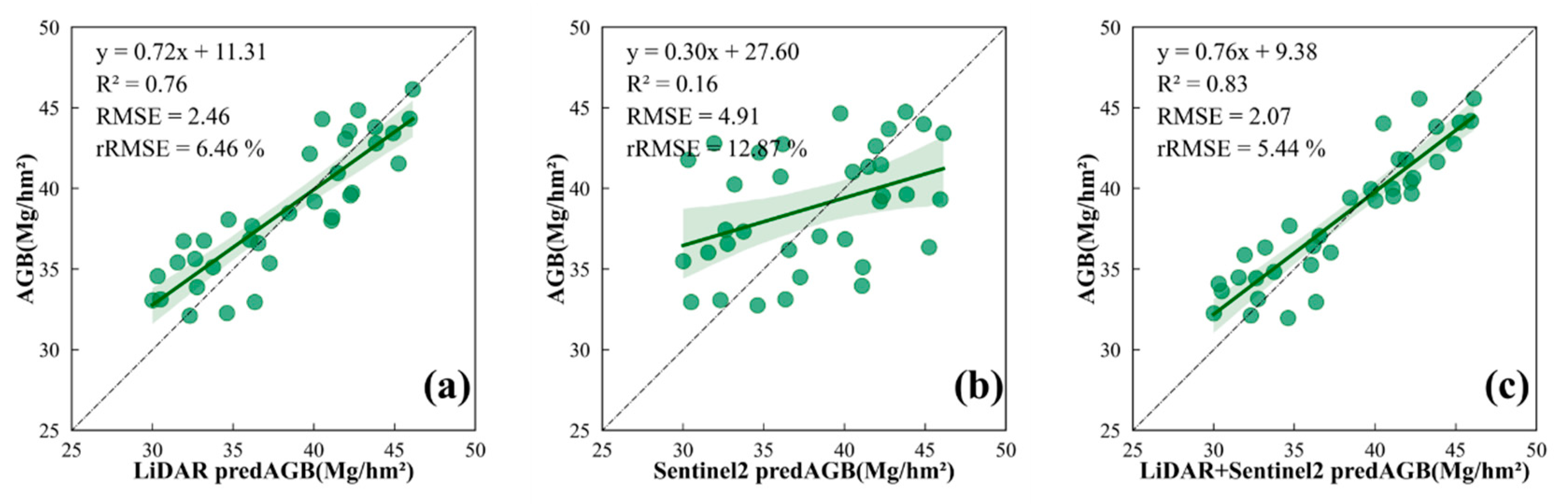
4.3.2. Comparison of Different Data Sources for the Same Modelling Approach
5. Discussion
5.1. Feature Screening
5.2. Analysis of Various Models in Comparison
5.3. Comparative Analysis of Different Remote Sensing Data Sources
6. Conclusions
7. Reflections and Outlook
- (1)
- In this study, three common models, MLR, SVR, and RF, were used to estimate the bamboo forest biomass, and more deep-learning models can be added to the estimation in future studies under the premise of expanding the sample capacity.
- (2)
- Limited by the flight range of the UAV-LiDAR, this study only explored the quantification of bamboo forest AGB based on the sample level, which can be expanded in future studies to explore the bamboo forest biomass and the changes in the time-space range.
- (3)
- The sample size of this study is limited, but it can be further expanded in future studies to investigate whether the modeling approach based on biomass range stratification can improve the estimation accuracy of AGB.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yen, T.-M.; Lee, J.-S. Comparing aboveground carbon sequestration between moso bamboo (Phyllostachys heterocycla) and China fir (Cunninghamia lanceolata) forests based on the allometric model. For. Ecol. Manag. 2011, 261, 995–1002. [Google Scholar] [CrossRef]
- Mciver, D.K.; Friedl, M.A. Using prior probabilities in decision-tree classification of remotely sensed data. Remote Sens. Environ. 2002, 81, 253–261. [Google Scholar] [CrossRef]
- Guo, Q.; Yang, G.; Du, T.; Shi, J. Carbon Character of Chinese Bamboo Forest. World Bamboo Ratt. 2005, 3, 4. [Google Scholar]
- Song, X.; Zhou, G.; Jiang, H.; Yu, S.; Fu, J.; Li, W.; Wang, W.; Ma, Z.; Peng, C. Carbon sequestration by Chinese bamboo forests and their ecological benefits: Assessment of potential, problems, and future challenges. Environ. Rev. 2011, 19, 418–428. [Google Scholar] [CrossRef]
- Nath, A.J.; Lal, R.; Das, A.K. Managing woody bamboos for carbon farming and carbon trading. Glob. Ecol. Conserv. 2015, 3, 654–663. [Google Scholar] [CrossRef]
- Miro, D.; Kim, C.; Hans, V.; Bert, G. Forest above-ground volume assessments with terrestrial laser scanning: A ground-truth validation experiment in temperate, managed forests. Ann. Bot. 2021, 6, 805–8119. [Google Scholar]
- Dong, L.; Du, H.; Mao, F.; Han, N.; Li, X.; Zhou, G.; Zhu, D.; Zheng, J.; Zhang, M.; Xing, L.; et al. Very High Resolution Remote Sensing Imagery Classification Using a Fusion of Random Forest and Deep Learning Technique—Subtropical Area for Example. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 13, 113–128. [Google Scholar] [CrossRef]
- Li, L.; Li, N.; Lu, D.; Chen, Y. Mapping Moso bamboo forest and its on-year and off-year distribution in a subtropical region using time-series Sentinel-2 and Landsat 8 data. Remote Sens. Environ. Interdiscip. J. 2019, 231, 111265. [Google Scholar] [CrossRef]
- Zhang, M.; Du, H.; Zhou, G.; Li, X.; Mao, F.; Dong, L.; Zheng, J.; Liu, H.; Huang, Z.; He, S. Estimating Forest Aboveground Carbon Storage in Hang-Jia-Hu Using Landsat TM/OLI Data and Random Forest Model. Forests 2019, 10, 1004. [Google Scholar] [CrossRef]
- Luo, K.; Wei, Y.; Du, J.; Liu, L.; Luo, X.; Shi, Y.; Pei, X.; Lei, N.; Song, C.; Li, J.; et al. Machine learning-based estimates of aboveground biomass of subalpine forests using Landsat 8 OLI and Sentinel-2B images in the Jiuzhaigou National Nature Reserve, Eastern Tibet Plateau. J. For. Res. 2022, 33, 1329–1340. [Google Scholar] [CrossRef]
- Chrysafis, I.; Mallinis, G.; Siachalou, S.; Patias, P. Assessing the relationships between growing stock volume and Sentinel-2 imagery in a Mediterranean forest ecosystem. Remote Sens. Lett. 2017, 8, 508–517. [Google Scholar] [CrossRef]
- Nuthammachot, N.; Askar, A.; Stratoulias, D.; Wicaksono, P. Combined use of Sentinel-1 and Sentinel-2 data for improving above-ground biomass estimation. Geocarto Int. 2022, 37, 366–376. [Google Scholar] [CrossRef]
- Theofanous, N.; Chrysafis, I.; Mallinis, G.; Domakinis, C.; Verde, N.; Siahalou, S. Aboveground Biomass Estimation in Short Rotation Forest Plantations in Northern Greece Using ESA’s Sentinel Medium-High Resolution Multispectral and Radar Imaging Missions. Forests 2021, 12, 902. [Google Scholar] [CrossRef]
- Zhou, L.; Li, X.; Zhang, B.; Xuan, J.; Gong, Y.; Tan, C.; Huang, H.; Du, H. Estimating 3D Green Volume and Aboveground Biomass of Urban Forest Trees by UAV-Lidar. Remote Sens. 2022, 14, 5211. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. LiDAR sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Li, X.; Du, H.; Mao, F.; Zhou, G.; Chen, L.; Xing, L.; Fan, W.; Xu, X.; Liu, Y.; Cui, L.; et al. Estimating bamboo forest aboveground biomass using EnKF-assimilated MODIS LAI spatiotemporal data and machine learning algorithms. Agric. For. Meteorol. 2018, 256–257, 445–457. [Google Scholar] [CrossRef]
- Ji, J.; Li, X.; Du, H.; Mao, F.; Fan, W.; Xu, Y.; Huang, Z.; Wang, J.; Kang, F. Multiscale leaf area index assimilation for Moso bamboo forest based on Sentinel-2 and MODIS data. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102519. [Google Scholar] [CrossRef]
- Li, H.; Zhang, G.; Zhong, Q.; Xing, L.; Du, H. Prediction of Urban Forest Aboveground Carbon Using Machine Learning Based on Landsat 8 and Sentinel-2: A Case Study of Shanghai, China. Remote Sens. 2023, 15, 284. [Google Scholar] [CrossRef]
- Li, Y. Spatiotemporal Evolution of Bamboo Forest Carbon Storage and Response to Land Use Dynamic by Remote Sensing in Zhejiang Province; Zhejiang Agriculture & Forestry University: Hangzhou, China, 2018. [Google Scholar]
- Zhang, Y. Carbon Storage Estimation and Its Changes of Phyllostachys edulis Forests in Fujian Province; Chinese Academy of Foresty: Beijing, China.
- Cui, R.; Du, H.; Zhou, G.; Xu, X.; Dong, D.; Lu, Y. Remote sensing-based dynamic monitoring of moso bamboo forest and its carbon stock change in Anji County. J. Zhejiang A F Univ. 2011, 28, 10. [Google Scholar]
- Li, Y.; Han, N.; Li, X.; Du, H.; Mao, F.; Cui, L.; Liu, T.; Xing, L. Spatiotemporal Estimation of Bamboo Forest Aboveground Carbon Storage Based on Landsat Data in Zhejiang, China. Remote Sens. 2018, 10, 898. [Google Scholar] [CrossRef]
- Du, H.; Cui, R.; Zhou, G.; Shi, Y.; Xu, X.; Fan, W.; Lü, Y. The responses of Moso bamboo (Phyllostachys heterocycla var. pubescens) forest aboveground biomass to Landsat TM spectral reflectance and NDVI. Acta Ecol. Sin. 2010, 30, 257–263. [Google Scholar] [CrossRef]
- Du, H.; Zhou, G.; Ge, H.; Fan, W.; Xu, X.; Fan, W.; Shi, Y. Satellite-based carbon stock estimation for bamboo forest with a non-linear partial least square regression technique. Int. J. Remote Sens. 2011, 33, 1917–1933. [Google Scholar] [CrossRef]
- Chen, Y.; Li, L.; Lu, D.; Li, D. Exploring Bamboo Forest Aboveground Biomass Estimation Using Sentinel-2 Data. Remote Sens. 2019, 11, 7. [Google Scholar] [CrossRef]
- Dengsheng, L. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar]
- Galidaki, G.; Zianis, D.; Gitas, I.; Radoglou, K.; Karathanassi, V.; Tsakiri–Strati, M.; Woodhouse, I.; Mallinis, G. Vegetation biomass estimation with remote sensing: Focus on forest and other wooded land over the Mediterranean ecosystem. Int. J. Remote Sens. 2016, 38, 1940–1966. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Danson, F.M. Estimating biomass carbon stocks for a Mediterranean forest in central Spain using LiDAR height and intensity data. Remote Sens. Environ. 2010, 114, 816–830. [Google Scholar] [CrossRef]
- Zhang, B.; Li, X.; Du, H.; Zhou, G.; Mao, F.; Huang, Z.; Zhou, L.; Xuan, J.; Gong, Y.; Chen, C. Estimation of Urban Forest Characteristic Parameters Using UAV-Lidar Coupled with Canopy Volume. Remote Sens. 2022, 14, 6375. [Google Scholar] [CrossRef]
- Cao, L.; Coops, N.C.; Sun, Y.; Ruan, H.; Wang, G.; Dai, J.; She, G. Estimating canopy structure and biomass in bamboo forests using airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2019, 148, 114–129. [Google Scholar] [CrossRef]
- Lu, D.; Chen, Q.; Wang, G.; Liu, L.; Li, G.; Moran, E. A survey of remote sensing-based aboveground biomass estimation methods in forest ecosystems. Int. J. Digit. Earth 2014, 9, 63–105. [Google Scholar] [CrossRef]
- Laurin, G.V.; Chen, Q.; Lindsell, J.A.; Coomes, D.A.; Frate, F.D.; Guerriero, L.; Pirotti, F.; Valentini, R. Above ground biomass estimation in an African tropical forest with lidar and hyperspectral data. ISPRS J. Photogramm. Remote Sens. 2014, 89, 49–58. [Google Scholar] [CrossRef]
- Rana, P.; Popescu, S.; Tolvanen, A.; Gautam, B.; Srinivasan, S.; Tokola, T. Estimation of tropical forest aboveground biomass in Nepal using multiple remotely sensed data and deep learning. Int. J. Remote Sens. 2023, 44, 5147–5171. [Google Scholar] [CrossRef]
- Wang, Y.; Jia, X.; Chai, G.; Lei, L.; Zhang, X. Improved estimation of aboveground biomass of regional coniferous forests integrating UAV-LiDAR strip data, Sentinel-1 and Sentinel-2 imageries. Plant Methods 2023, 19, 65. [Google Scholar] [CrossRef] [PubMed]
- Jiang, F.; Deng, M.; Tang, J.; Fu, L.; Sun, H. Integrating spaceborne LiDAR and Sentinel-2 images to estimate forest aboveground biomass in Northern China. Carbon Balance Manag. 2022, 17, 12. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Du, H.; Li, X.; Mao, F.; Kang, F. Remote Sensing Estimation of Bamboo Forest Aboveground Biomass Based on Geographically Weighted Regression. Remote Sens. 2021, 13, 2962. [Google Scholar] [CrossRef]
- Rosas-Chavoya, M.; López-Serrano, P.M.; Vega-Nieva, D.J.; Hernández-Díaz, J.C.; Wehenkel, C.; Corral-Rivas, J.J. Estimating Above-Ground Biomass from Land Surface Temperature and Evapotranspiration Data at the Temperate Forests of Durango, Mexico. Forests 2023, 14, 299. [Google Scholar] [CrossRef]
- Yukun, G.; Dengsheng, L.; Guiying, L.; Guangxing, W.; Qi, C.; Lijuan, L.; Dengqiu, L. Comparative Analysis of Modeling Algorithms for Forest Aboveground Biomass Estimation in a Subtropical Region. Remote Sens. 2018, 10, 627. [Google Scholar]
- Kursa, M.B.; Rudnicki, W.R. Feature Selection with the Boruta Package. J. Stat. Softw. 2010, 36, 85. [Google Scholar] [CrossRef]
- Kursa, M.B.; Rudnicki, W.R. Boruta: Wrapper Algorithm for All Relevant Feature Selection. 2015. Available online: https://cran.r-project.org/web/packages/Boruta/index.html (accessed on 14 February 2024).
- Mostofa, M.Z. Comparing Prediction Accuracies of Cancer Survival Using Machine Learning Techniques and Statistical Methods in Combination with Data Reduction Methods; North Dakota State University of Agriculture and Applied Science: Fargo, ND, USA, 2022. [Google Scholar]
- Zhao, H.L.; Gan, S.; Yuan, X.P.; Hu, L.; Wang, J.J.; Liu, S. Prediction of low Zn concentrations in soil from mountainous areas of central Yunnan Province using a combination of continuous wavelet transform and Boruta algorithm. Int. J. Remote Sens. 2023, 44, 4753–4774. [Google Scholar] [CrossRef]
- Gilani, N.; Belaghi, R.A.; Aftabi, Y.; Faramarzi, E.; Edgünlü, T.; Somi, M.H. Identifying Potential miRNA Biomarkers for Gastric Cancer Diagnosis Using Machine Learning Variable Selection Approach. Front. Genet. 2022, 12, 779455. [Google Scholar] [CrossRef]
- Uniyal, S.; Purohit, S.; Chaurasia, K.; Rao, S.S.; Amminedu, E. Quantification of carbon sequestration by urban forest using Landsat 8 OLI and machine learning algorithms in Jodhpur, India. Urban For. Urban Green. 2022, 67, 127445. [Google Scholar] [CrossRef]
- Huang, T.; Ou, G.; Wu, Y.; Zhang, X.; Liu, Z.; Xu, H.; Xu, X.; Wang, Z.; Xu, C. Estimating the Aboveground Biomass of Various Forest Types with High Heterogeneity at the Provincial Scale Based on Multi-Source Data. Remote Sens. 2023, 15, 3550. [Google Scholar] [CrossRef]
- Englhart, S.; Keuck, V.; Siegert, F. Modeling Aboveground Biomass in Tropical Forests Using Multi-Frequency SAR Data—A Comparison of Methods. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 298–306. [Google Scholar] [CrossRef]
- Monnet, J.-M.; Chanussot, J.; Berger, F. Support Vector Regression for the Estimation of Forest Stand Parameters Using Airborne Laser Scanning. IEEE Geosci. Remote Sens. Lett. 2011, 8, 580–584. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Beier, C.M.; Johnson, L. Mapping Two Decades of New York State Forest Aboveground Biomass Change Using Remote Sensing. Remote Sens. 2022, 14, 4097. [Google Scholar] [CrossRef]
- Yu, Y.; Pan, Y.; Yang, X.; Fan, W. Spatial Scale Effect and Correction of Forest Aboveground Biomass Estimation Using Remote Sensing. Remote Sens. 2022, 14, 2828. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, X.; Shao, Z.; Jiang, W.; Gao, H. Integrating Sentinel-1 and 2 with LiDAR data to estimate aboveground biomass of subtropical forests in northeast Guangdong, China. Int. J. Digit. Earth 2023, 16, 158–182. [Google Scholar] [CrossRef]
- Dong, L.; Du, H.; Han, N.; Li, X.; Zhu, D.; Mao, F.; Zhang, M.; Zheng, J.; Liu, H.; Huang, Z.; et al. Application of Convolutional Neural Network on Lei Bamboo Above-Ground-Biomass (AGB) Estimation Using Worldview-2. Remote Sens. 2020, 12, 958. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Z.; Cao, L. Estimating forest stand characteristics in a coastal plain forest plantation based on vertical structure profile parameters derived from ALS data. J. Remote Sens. 2018, 22, 17. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Guomo, Z. Study on Carbon Storage, Fixation and Its Allocation and Distribution in Moso Bamboo Forest Ecosystems; Zhejiang University: Hangzhou, China, 2006. [Google Scholar]
- Ma, Q.; Su, Y.; Guo, Q. Comparison of Canopy Cover Estimations From Airborne LiDAR, Aerial Imagery, and Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4225–4236. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Camarretta, N.; Ehbrecht, M.; Seidel, D.; Wenzel, A.; Zuhdi, M.; Merk, M.S.; Schlund, M.; Erasmi, S.; Knohl, A. Using Airborne Laser Scanning to Characterize Land-Use Systems in a Tropical Landscape Based on Vegetation Structural Metrics. Remote Sens. 2021, 13, 4794. [Google Scholar] [CrossRef]
- Estornell, J.; Hadas, E.; Martí, J.; López-Cortés, I. Tree extraction and estimation of walnut structure parameters using airborne LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102273. [Google Scholar] [CrossRef]
- Dong, W.; Lan, J.; Liang, S.; Yao, W.; Zhan, Z. Selection of LiDAR geometric features with adaptive neighborhood size for urban land cover classification. Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 99–110. [Google Scholar] [CrossRef]
- Owers, C.J.; Rogers, K.; Woodroffe, C.D. Terrestrial laser scanning to quantify above-ground biomass of structurally complex coastal wetland vegetation. Estuar. Coast. Shelf Sci. 2018, 204, 164–176. [Google Scholar] [CrossRef]
- Michalowska, M.; Rapinski, J. A Review of Tree Species Classification Based on Airborne LiDAR Data and Applied Classifiers. Remote Sens. 2021, 13, 353. [Google Scholar] [CrossRef]
- Francisca, R.D.S.P.; Milton, K.; Mário, G.S.; Gustavo, E.; Cristina, B.; Gregoire, V. Reducing Uncertainty in Mapping of Mangrove Aboveground Biomass Using Airborne Discrete Return Lidar Data. Remote Sens. 2018, 10, 637. [Google Scholar]
- Shi, Y.; Wang, T.; Skidmore, A.K.; Heurich, M. Important LiDAR metrics for discriminating forest tree species in Central Europe. ISPRS J. Photogramm. Remote Sens. 2018, 137, 163–174. [Google Scholar] [CrossRef]
- Tucker, C.; Elgin, J.; McMurtrey, J.; Fan, C. Monitoring corn and soybean crop development with hand-held radiometer spectral data. Remote Sens. Environ. 1979, 8, 237–248. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Broge, N.H.; Leblanc, E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Tan, Y.; Sun, J.-Y.; Zhang, B.; Chen, M.; Liu, Y.; Liu, X.-D. Sensitivity of a Ratio Vegetation Index Derived from Hyperspectral Remote Sensing to the Brown Planthopper Stress on Rice Plants. Sensors 2019, 19, 375. [Google Scholar] [CrossRef] [PubMed]
- Merzlyak, M.N.; Gitelson, A.A.; Chivkunova, O.B.; Rakitin, V.Y. Non-destructive optical detection of pigment changes during leaf senescence and fruit ripening. Physiol. Plant. 1999, 106, 135–141. [Google Scholar] [CrossRef]
- Chen, D.; Huang, J.; Jackson, T.J. Vegetation water content estimation for corn and soybeans using spectral indices derived from MODIS near- and short-wave infrared bands. Remote Sens. Environ. 2005, 98, 225–236. [Google Scholar] [CrossRef]
- Rouse, E.B.; Coops, N.C.; St-Onge, B.; Begin, J. Estimating Forest Stand Age from LiDAR-Derived Predictors and Nearest Neighbor Imputation. For. Sci. 2014, 60, 128–136. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Qiu, M.; Gan, S.; Zhao, L. Watershed Extraction in the Erhai Sea using Sentinel-2 Imagery An Analytical Study of Index Methods. Urban Geotech. Investig. Surv. 2022, 11, 117–122. [Google Scholar]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Muhaimin, M.; Fitriani, D.; Adyatma, S.; Arisanty, D. mapping build-up area density using normalized difference built-up index (ndbi) and urban index (ui) wetland in the city banjarmasin. IOP Conf. Ser. Earth Environ. Sci. 2022, 1089, 012036. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Mohammadpour, P.; Viegas, D.X.; Viegas, C.J.R.S. Vegetation Mapping with Random Forest Using Sentinel 2 and GLCM Texture Feature—A Case Study for Lousã Region, Portugal. Remote Sens. 2022, 14, 4585. [Google Scholar] [CrossRef]
- Iqbal, N.; Mumtaz, R.; Shafi, U.; Zaidi, S.M.H. Gray level co-occurrence matrix (GLCM) texture based crop classification using low altitude remote sensing platforms. PeerJ Comput. Sci. 2021, 7, e536. [Google Scholar] [CrossRef] [PubMed]
- Marshall, T.L.; Nickels, L.C.; Brady, P.W.; Edgerton, E.J.; Lee, J.J.; Hagedorn, P.A. Developing a machine learning model to detect diagnostic uncertainty in clinical documentation. J. Hosp. Med. 2023, 18, 405–412. [Google Scholar] [CrossRef] [PubMed]
- Lamine, G.M.; Hilal, K.M.; Rongqin, C.; Fei, L. Potential of Vis-NIR to measure heavy metals in different varieties of organic-fertilizers using Boruta and deep belief network. Ecotoxicol. Environ. Saf. 2021, 228, 112996. [Google Scholar]
- Lumley, T.; Miller, A. leaps: Regression Subset Selection. EMBO J. 2009, 7. [Google Scholar]
- Ding, j.; Huang, w.; Liu, y.; Hu, y. Estimation of Forest Aboveground Biomass in Northwest Hunan Province Based on Machine Learning and Multi-Source Data. Sci. Silvae Sin. 2021, 57, 36–48. [Google Scholar]
- Poorazimy, M.; Shataee, S.; McRoberts, R.E.; Mohammadi, J. Integrating airborne laser scanning data, space-borne radar data and digital aerial imagery to estimate aboveground carbon stock in Hyrcanian forests, Iran. Remote Sens. Environ. 2020, 240, 111669. [Google Scholar] [CrossRef]
- Zhao, X. A Study on Forest Aboveground Biomass Estimation Based on Airborne Excitation Radar; Xi’an University of Science and Technology: Xi’an, China, 2020. [Google Scholar]
- Xiao, Y. Research on the Estimation Method of Forest Volume of Wangyedian Forest Farm Based on Multi-Source Remote Sensing Data; Central South University of forestry & Technology: Changsha, China, 2021. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 148–156. [Google Scholar]
- Breiman, L. Bagging Predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]
- Ho, T.K. The Random Subspace Method for Constructing Decision Forests. IEEE Trans. Pattern Anal. Mach. Intell 1998, 20, 832–844. [Google Scholar]
- Tang, S. Study on Extraction of Stand Age Information of Typical Coniferous Forests in Northeast China and Its Impact on Tree Species Classification; Nanjing University: Nanjing, China, 2020. [Google Scholar]
- Dong, S.; Huang, Z. A Brief Theoretical Overview of Random Forests. J. Integr. Technol. 2013, 2, 1–7. [Google Scholar]
- Kuangnan, F.; Jianbin, W.; Jianpin, Z.; Bangchang, X. A Review of Research on Random Forest Methods. Stat. Inf. Forum 2011, 26, 32–38. [Google Scholar]
- Chen, L.; Zhou, G.; Du, H.; Liu, Y.; Mao, F.; Xu, X.; Li, X.; Cui, L.; Li, Y.; Zhu, D. Simulation of CO2 Flux and Controlling Factors in Moso Bamboo Forest Using Random Forest Algorithm. Sci. Silvae Sin. 2018, 54, 1–12. [Google Scholar]
- Wen, B.; Zhao, L.; Huang, L. Proof of Asymptotic Equivalence by Cross-Validation of the AIC Criterion with the Leave-One-Out Method. Stat. Decis. 2022, 38, 40–43. [Google Scholar] [CrossRef]
- Lin, C.; Nicholas, C.; Txomin, H.; John, I.; Jinsong, D.; Guanghui, S. Using Small-Footprint Discrete and Full-Waveform Airborne LiDAR Metrics to Estimate Total Biomass and Biomass Components in Subtropical Forests. Remote Sens. 2014, 6, 7110–7135. [Google Scholar]
- Richardson, J.J.; Moskal, L.M.; Kim, S.H. Modeling approaches to estimate effective leaf area index from aerial discrete-return LIDAR. Agric. For. Meteorol. 2009, 149, 1152–1160. [Google Scholar] [CrossRef]
- Xiong, F.; Zeng, H.; Xie, J.; Li, X.; Chen, J. Preliminary study on dry and wet season changes of biomass on Chinese fir forest land based on UAVLidar. Natl. Remote Sens. Bull. 2023, 1–13. [Google Scholar] [CrossRef]
- Brennan, R.; Webster, T.L. Object-oriented land cover classification of lidar-derived surfaces. Can. J. Remote Sens. 2006, 32, 162–172. [Google Scholar] [CrossRef]
- Antonarakis, A.S.; Richards, K.S.; Brasington, J. Object-based land cover classification using airborne LiDAR. Remote Sens. Environ. 2008, 112, 2988–2998. [Google Scholar] [CrossRef]
- Steven, M.D.; Malthus, T.J.; Baret, F.; Xu, H.; Chopping, M.J. Intercalibration of vegetation indices from different sensor systems. Remote Sens. Environ. 2003, 88, 412–422. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, D. Improving forest aboveground biomass estimation using seasonal Landsat NDVI time-series. ISPRS J. Photogramm. Remote Sens. 2015, 102, 222–231. [Google Scholar] [CrossRef]
- Pertille, C.T.; Nicoletti, M.F.; Dobner Jr, M. Estimating the commercial volume of a Pinus taeda L. plantation using active and passive sensors. Cerne 2023, 29, e-013108. [Google Scholar] [CrossRef]
- Feng, Y.; Lu, D.; Chen, Q.; Keller, M.; Moran, E.; Nara Dos-Santos, M.; Luis Bolfe, E.; Batistella, M. Examining effective use of data sources and modeling algorithms for improving biomass estimation in a moist tropical forest of the Brazilian Amazon. Int. J. Digit. Earth 2017, 10, 996–1016. [Google Scholar] [CrossRef]
- Luodan, C.; Jianjun, P.; Ruijuan, L.; Jialin, L.; Zhaofu, L. Integrating Airborne LiDAR and Optical Data to Estimate Forest Aboveground Biomass in Arid and Semi-Arid Regions of China. Remote Sens. 2018, 10, 532. [Google Scholar]
- Peng, X.; Zhao, A.; Chen, Y.; Chen, Q.; Liu, H.; Wang, J.; Li, H. Comparison of Modeling Algorithms for Forest Canopy Structures Based on UAV-LiDAR: A Case Study in Tropical China. Forests 2020, 11, 1324. [Google Scholar] [CrossRef]
- Zang, Y.; Shao, Z. Assessing of Urban Vegetation Biomass in Combination with LiDAR and High-resolution Remote Sensing Images. Int. J. Remote Sens. 2021, 42, 964–985. [Google Scholar] [CrossRef]
- Chen, Q. LiDAR Remote Sensing of Vegetation Biomass. Environ. Sci. 2013, 399, 399–420. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics of UAV-LiDAR Sensor and Flight Parameters | Specification |
|---|---|
| Laser scanner | H300-RT |
| Flight height | 80 m |
| Flight speed | 8 m/s |
| Route spacing | 25 m |
| Wavelength | 905 nm |
| Scan speed | 640,000 points/s |
| Maximum scanning angle | ±15° |
| Laser scan frequency | 20 Hz |
| Average point density | 400 ptds/m2 |
| Feature Type | Feature Name | Feature Description | Notes and References |
|---|---|---|---|
| Structural characteristics | CC | Canopy Cover, the ratio of vegetation points within the initial echo relative to the overall count of points in the initial echo. | [55] |
| GF | Gap Fraction, Extract the number of ground points with a Z-value below the height threshold (2 m) divided by the total number of points | ||
| LAI | Leaf Area Index, , where Ang denotes the average scanning angle, GF represents the rate of gaps, and k stands for the coefficient of extinction. | ||
| Height-based metrics | H1/H5/H10/H20/H25/H30/H40/H50/H60/H70/H75/H80/H90/H95/H99 | The percentiles of the canopy height distribution of first returns | [56,57,58,59,60] |
| Hiq | AIHiq = AIH75 AIH25. | ||
| AIH1/AIH5/AIH10/AIH20/AIH25/AIH30/AIH40/AIH50/AIH60/AIH70/AIH75/AIH80/AIH90/AIH95/AIH99 | Cumulative percentile of canopy height distribution of first returns | ||
| AIHiq | AIHiq = AIH75 AIH25. | ||
| Density-based metrics | D0/D1/D2/D3/D4/D5/D6/D7/D8/D9 | The ratio of data points exceeding the quantiles to the overall count of data points. | [61] |
| Intensity-based metrics | I1/I5/I10/I20/I25/I30/I40/I50/I60/I70/I75/I80/I90/I95/I99 | The percentiles of the canopy intensity distribution of first returns | [62,63] |
| Iiq | Iiq = I75 I25. | ||
| AII1/AII5/AII10/AII20/AII25/AII30/AII40/AII50/AII60/AII70/AII75/AII80/AII90/AII95/AII99 | Cumulative percentile of the canopy intensity distribution of first returns | ||
| Imax/Imin/Imean/Imedia/Imadme | Median of the highest intensity/lowest intensity/average intensity/median intensity/median absolute deviation for all points within each statistical cell | ||
| Ivar/Istdde/Iskew/Ikurt/Icv/Imad | Variance/standard deviation/skewness/kurtosis/coefficient of variation/mean absolute deviation for all point intensities within each statistical cell |
| Type | Name | Calculation Models | Abbreviation | Notes and References |
|---|---|---|---|---|
| Original Band | Aerosols | / | B1 | |
| Blue | / | B2 | ||
| Green | / | B3 | ||
| Red | / | B4 | ||
| Red Edge 1 | / | B5 | ||
| Red Edge 2 | / | B6 | ||
| Red Edge 3 | / | B7 | ||
| NIR | / | B8 | ||
| Red Edge 4 | / | B8A | ||
| Water vapor | / | B9 | ||
| SWIR 1 | / | B11 | ||
| SWIR 2 | / | B12 | ||
| Spectral vegetation indices | DVI | DVI | [64] | |
| EVI | EVI | [65] | ||
| TVI | TVI | [66] | ||
| RVI | RVI | [67] | ||
| PSRI | PSRI | [68] | ||
| NDII | NDII | [69] | ||
| NDWI | NDWI | [70] | ||
| NDVI | NDVI | [71] | ||
| MNDWI | MNDWI | [72] | ||
| SAVI | SAVI | [73] | ||
| NDBI | NDBI | [74] | ||
| Cire | Cire | [75] | ||
| Texture features based on the gray-level co-occurrence matrix (GLCM) | Variance | VAR | ||
| Homogeneity | HOM | is the th row of the th column in the th moving window. | ||
| Contrast | CON | |||
| Dissimilarity | DIS | |||
| Entropy | ENT | |||
| Angular second moment | ASM | |||
| Correlation | COR | [18,76,77] | ||
| Cluster Shade | SHA |
| Feature Types | Number | Feature Name | |
|---|---|---|---|
| LiDAR parameter | Structural characteristics | 3 | CC/GF/LAI |
| Height-based metrics | 18 | H1/H10/H20/H25/H30/Hiq/ AIH1/AIH5/AIH10/AIH20/AIH25/AIH30/AIH40/AIHiq Hmad/Hcv/Hmadme/Hmin | |
| Density-based metrics | 1 | D0 | |
| Intensity-based metrics | 8 | I75/I80/AII30/AII60/Ikurt/Iskew/Istdde/Imad | |
| Sentinel-2 parameter | Original Band | 1 | B8 |
| Spectral vegetation indices | 5 | DVI/EVI/PSRI/SAVI/TVI | |
| Data Source | Model | R2 | RMSE | rRMSE(%) |
|---|---|---|---|---|
| LiDAR (UL) | MLR | 0.71 | 2.70 | 7.07 |
| SVR | 0.76 | 2.46 | 6.46 | |
| RF | 0.88 | 1.74 | 4.57 | |
| Sentinel-2 (ST) | MLR | 0.29 | 4.24 | 11.12 |
| SVR | 0.16 | 4.91 | 12.87 | |
| RF | 0.45 | 3.68 | 9.66 | |
| LiDAR + Sentinel-2 (UL + ST) | MLR | 0.74 | 2.58 | 6.76 |
| SVR | 0.83 | 2.07 | 5.44 | |
| RF | 0.89 | 1.64 | 4.30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Zhao, Y.; Chen, C.; Li, X.; Mao, F.; Lv, L.; Yu, J.; Song, M.; Huang, L.; Chen, J.; et al. UAV-LiDAR Integration with Sentinel-2 Enhances Precision in AGB Estimation for Bamboo Forests. Remote Sens. 2024, 16, 705. https://doi.org/10.3390/rs16040705
Zhang L, Zhao Y, Chen C, Li X, Mao F, Lv L, Yu J, Song M, Huang L, Chen J, et al. UAV-LiDAR Integration with Sentinel-2 Enhances Precision in AGB Estimation for Bamboo Forests. Remote Sensing. 2024; 16(4):705. https://doi.org/10.3390/rs16040705
Chicago/Turabian StyleZhang, Lingjun, Yinyin Zhao, Chao Chen, Xuejian Li, Fangjie Mao, Lujin Lv, Jiacong Yu, Meixuan Song, Lei Huang, Jinjin Chen, and et al. 2024. "UAV-LiDAR Integration with Sentinel-2 Enhances Precision in AGB Estimation for Bamboo Forests" Remote Sensing 16, no. 4: 705. https://doi.org/10.3390/rs16040705
APA StyleZhang, L., Zhao, Y., Chen, C., Li, X., Mao, F., Lv, L., Yu, J., Song, M., Huang, L., Chen, J., Zheng, Z., & Du, H. (2024). UAV-LiDAR Integration with Sentinel-2 Enhances Precision in AGB Estimation for Bamboo Forests. Remote Sensing, 16(4), 705. https://doi.org/10.3390/rs16040705