

Enhanced Graph Structure Representation for Unsupervised Heterogeneous Change Detection





Abstract
:1. Introduction
1.1. Background
1.2. Motivation and Contribution
- (1)
- Proposing an unsupervised heterogeneous CD method that measures disparities between heterogeneous images via structural mapping, without necessitating labeled or pseudo-labeled samples. This will enhance the algorithm’s automation, reduce the cost of the algorithm, and improve its adaptability to different change scenarios.
- (2)
- Introducing a new method to measure structural differences based on the Laplacian matrix, focusing on quantifying connectivity differences between graph vertices for enhanced precision in capturing structural changes in heterogeneous images.
- (3)
- Enhancing the graph’s representation by considering the unchanged probabilities of vertices and employing an iterative computation framework. The enhanced graph structure is particularly beneficial for improving the capability of CD. The results from four heterogeneous image datasets and two homogeneous image datasets validate the efficacy of the proposed method.
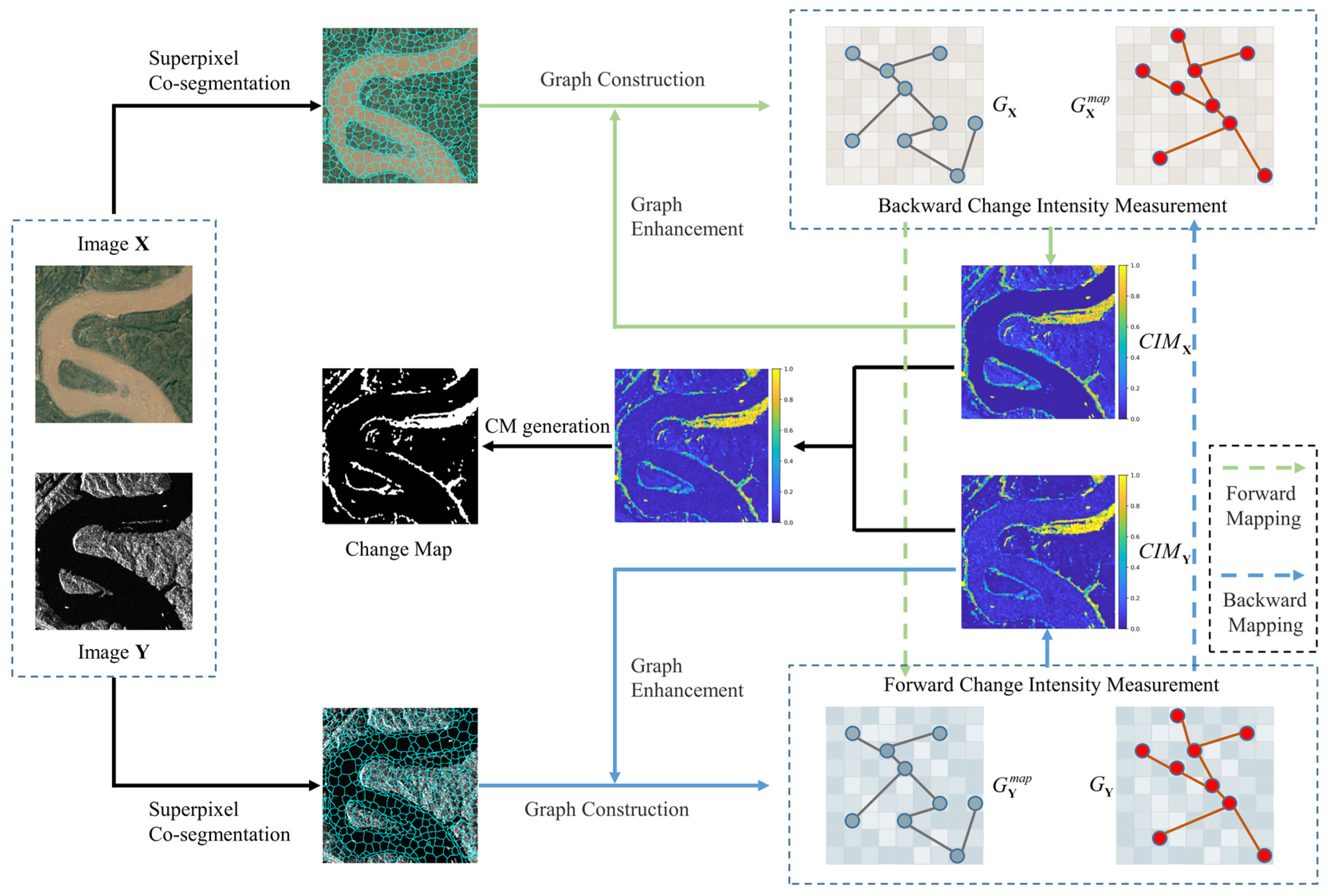
2. Proposed and Methods
2.1. Superpixel Co-Segmentation of Heterogeneous Images
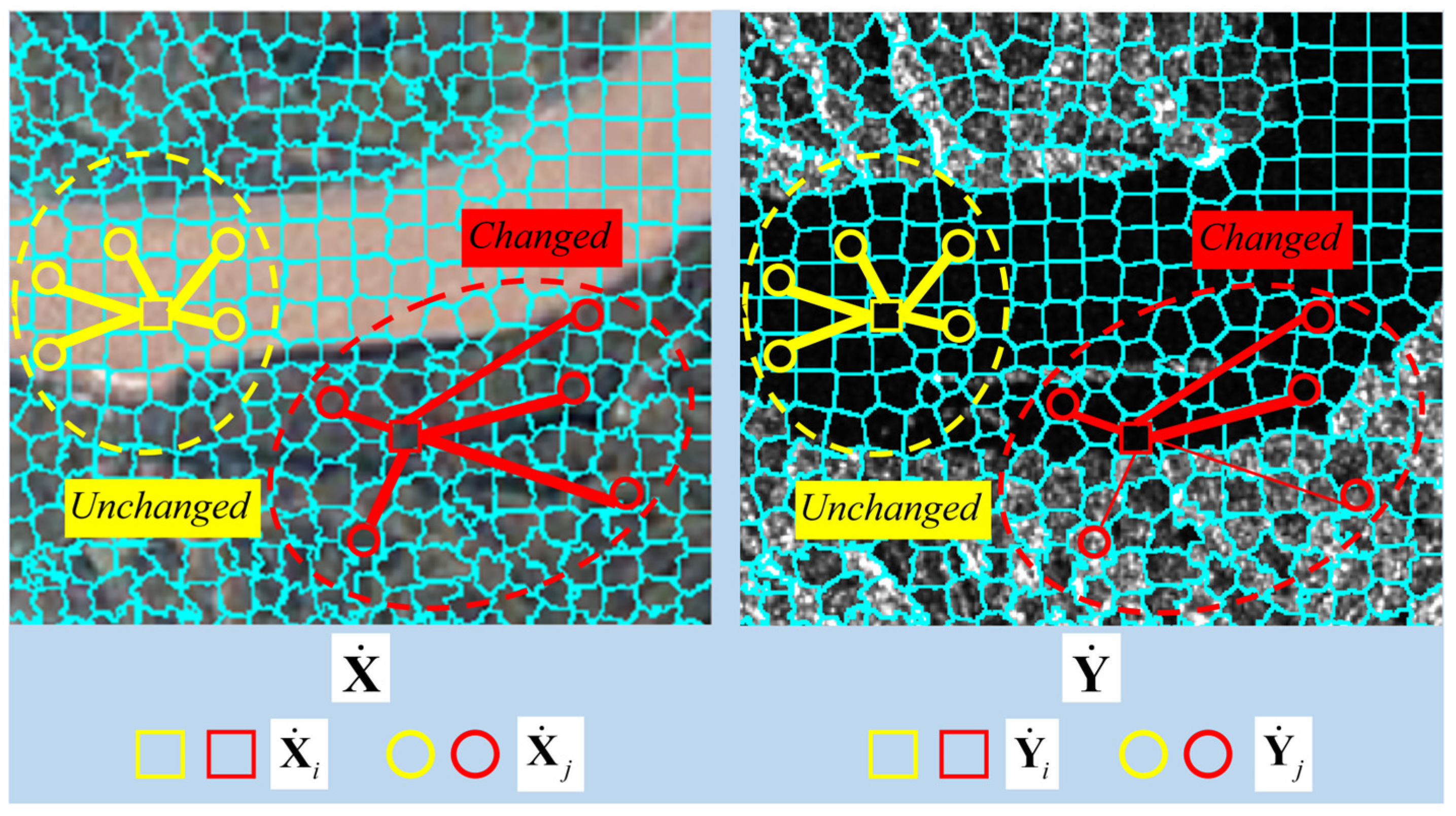
2.2. Structural Graph Construction and CI Measurement
2.3. Graph Structure Representation Enhancement
2.4. CM Generation
| Algorithm 1. Framework of EGSR |
| Input: images and , parameters of Preprocessing: Superpixel co-segmentation of heterogeneous images. Structural graph construction. CI measurement. Main iteration loop of EGSR: For t = 1,2, …, T 1. Calculating the unchanged probabilities and of and with Equations (8) and (9) 2. Constructing enhanced structured graph and with Equation (10). 3. CI measurement: Calculation of forward and backward CIs by Equations (11) and (12). Exit for Output: Compute the binary CM by FCM. |
3. Experiments and Results
3.1. Experiments
3.1.1. Dataset Description
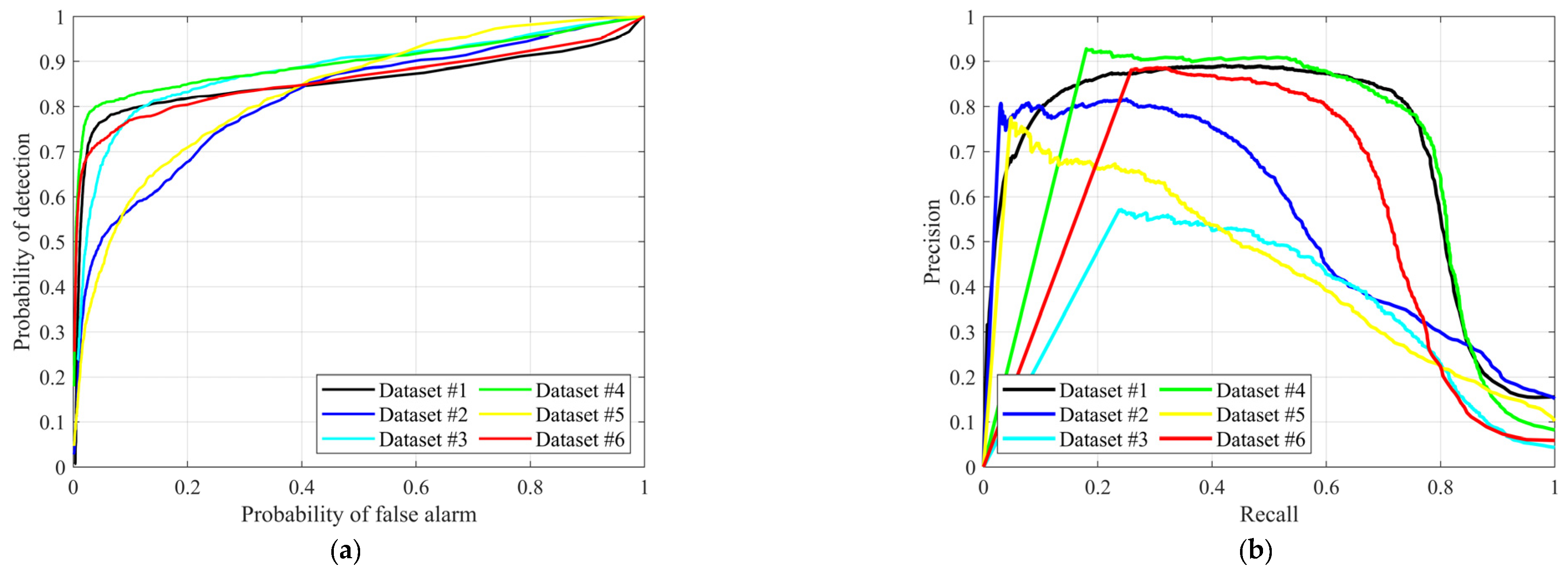
3.1.2. Evaluation Criteria
3.1.3. Comparison Methods
- (1)
- LTFL [29]: It employs deep learning for extracting high-dimensional features from heterogeneous images. It subsequently utilizes a change classifier trained on these differences to identify regions that have changed.
- (2)
- INLPG [36]: This method constructs non-local structural features from heterogeneous images and maps these features to the same image domain for a comparative analysis, aiming to emphasize changed regions.
- (3)
- GBF [34]: By integrating graph structure information, GBF identifies regions with the most dissimilar graph structures, effectively highlighting areas that have changed.
- (4)
- IRG-McS [39]: This approach explores superpixel-based structural features in heterogeneous images. By employing Markov co-segmentation, it obtains a feature difference map to identify regions that have changed.
- (5)
- SCASC [38]: It preserves the structural features of the source image, transforms it into the target image domain with sparse constraints, and extracts change information by comparing the source and transformed images.
- (6)
- SRGCAE [40]: SRGCAE employs a graph convolutional autoencoder to learn the graph structure relationships of heterogeneous images and extracts change information by contrasting these relationships.
- (7)
- GIR-MRF [37]: GIR-MRF employs an unsupervised image regression approach grounded in the inherent structure consistency of heterogeneous images, integrating global and local constraints through structured graph learning, and improving detection accuracy with a Markov segmentation model.
3.1.4. Experimental Parameter Setting
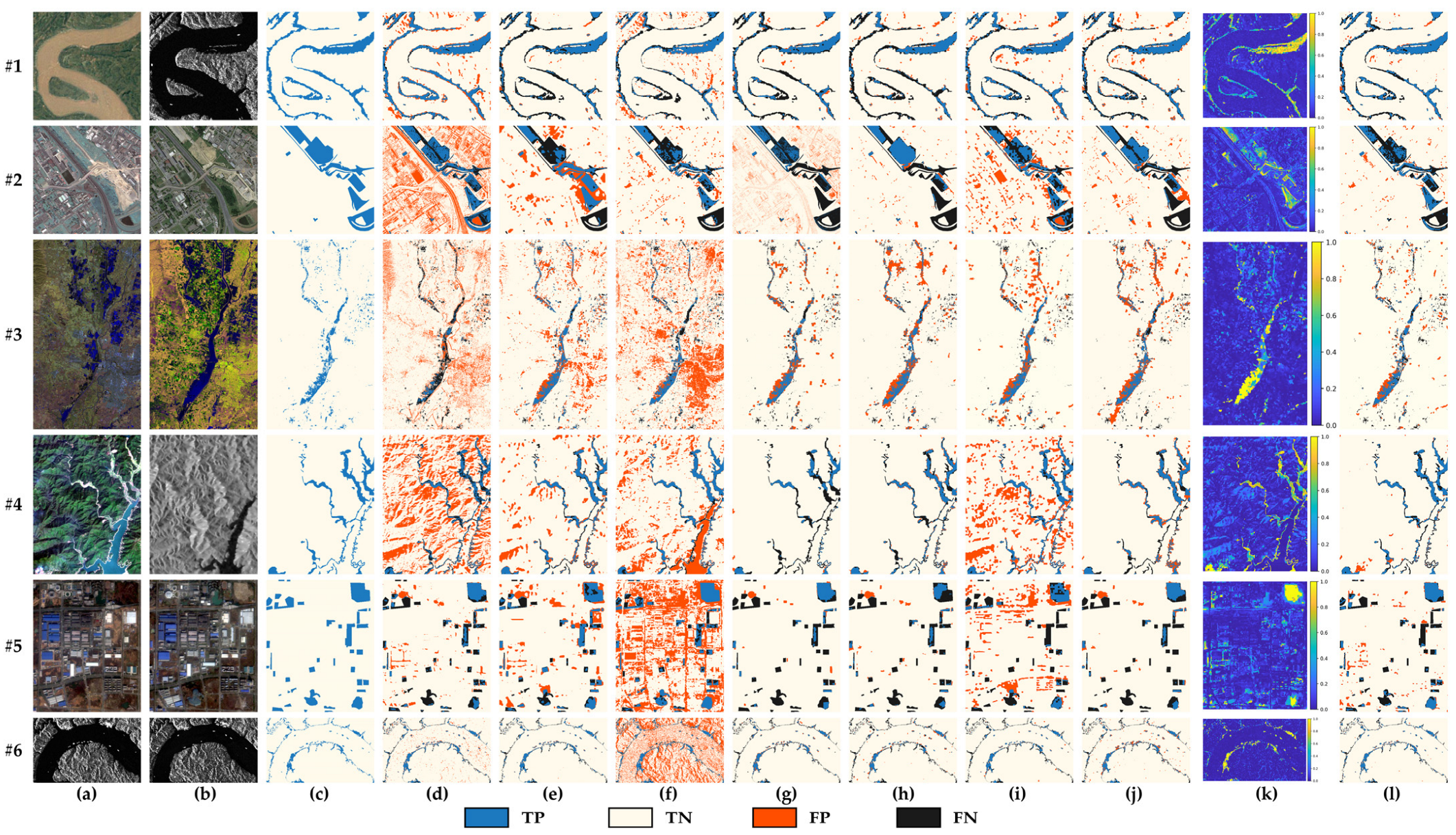
3.2. Results
4. Discussion
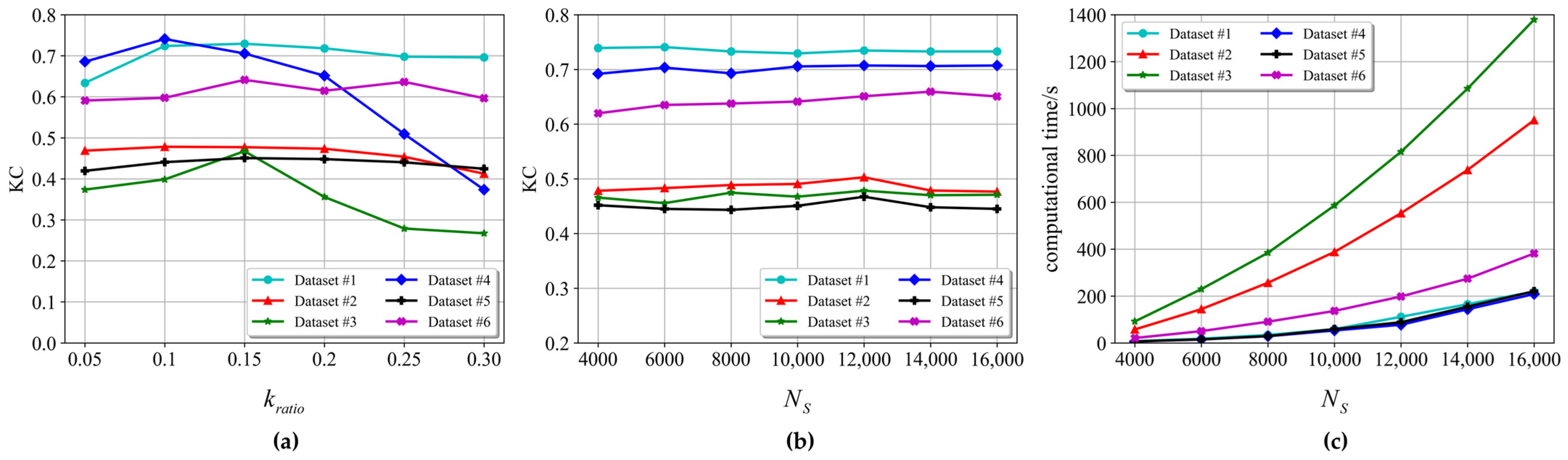
4.1. Parameter Analysis
4.1.1. Neighbor Ratio
4.1.2. Number of Superpixels
4.2. Ablation Experiment
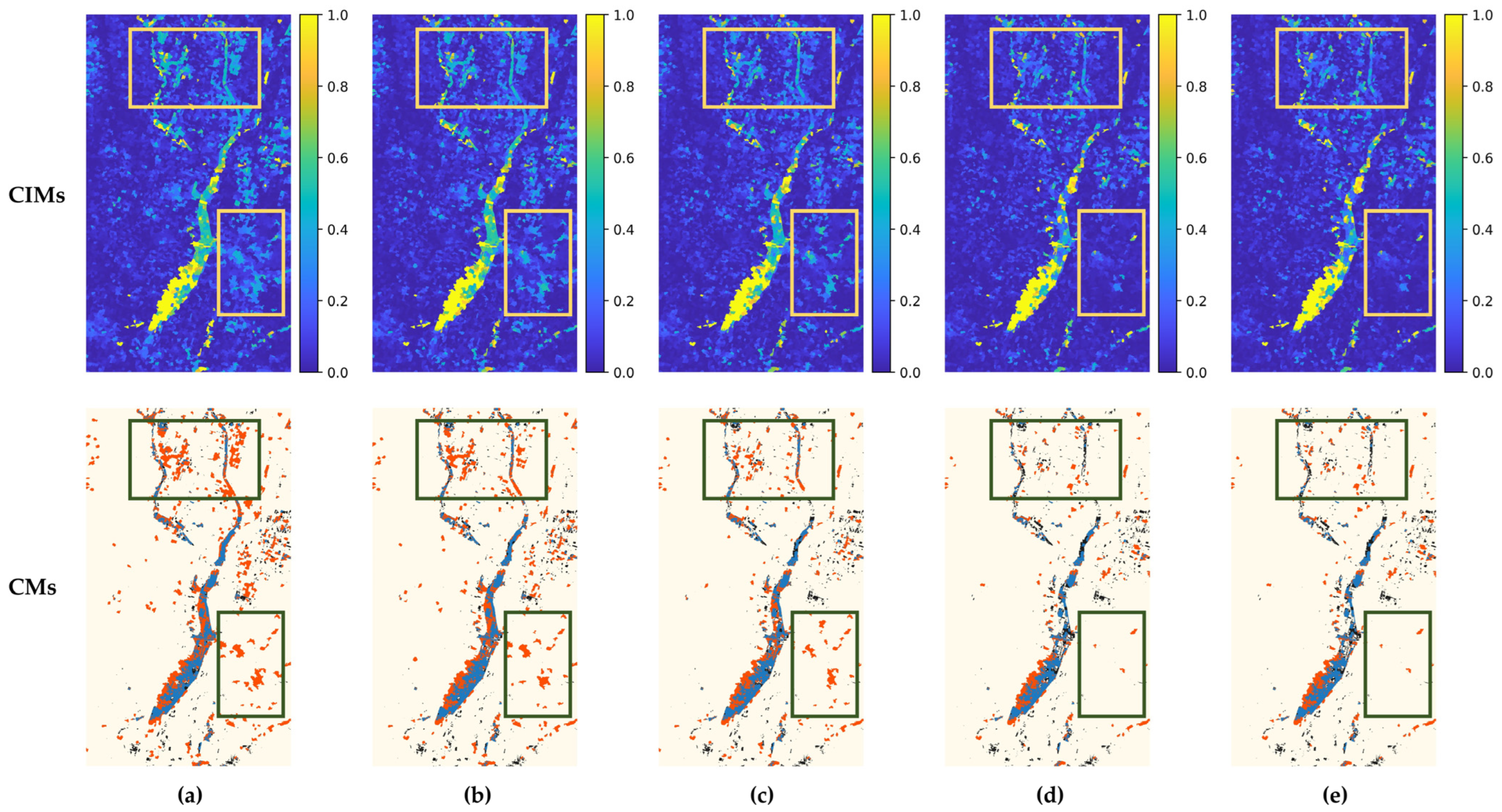
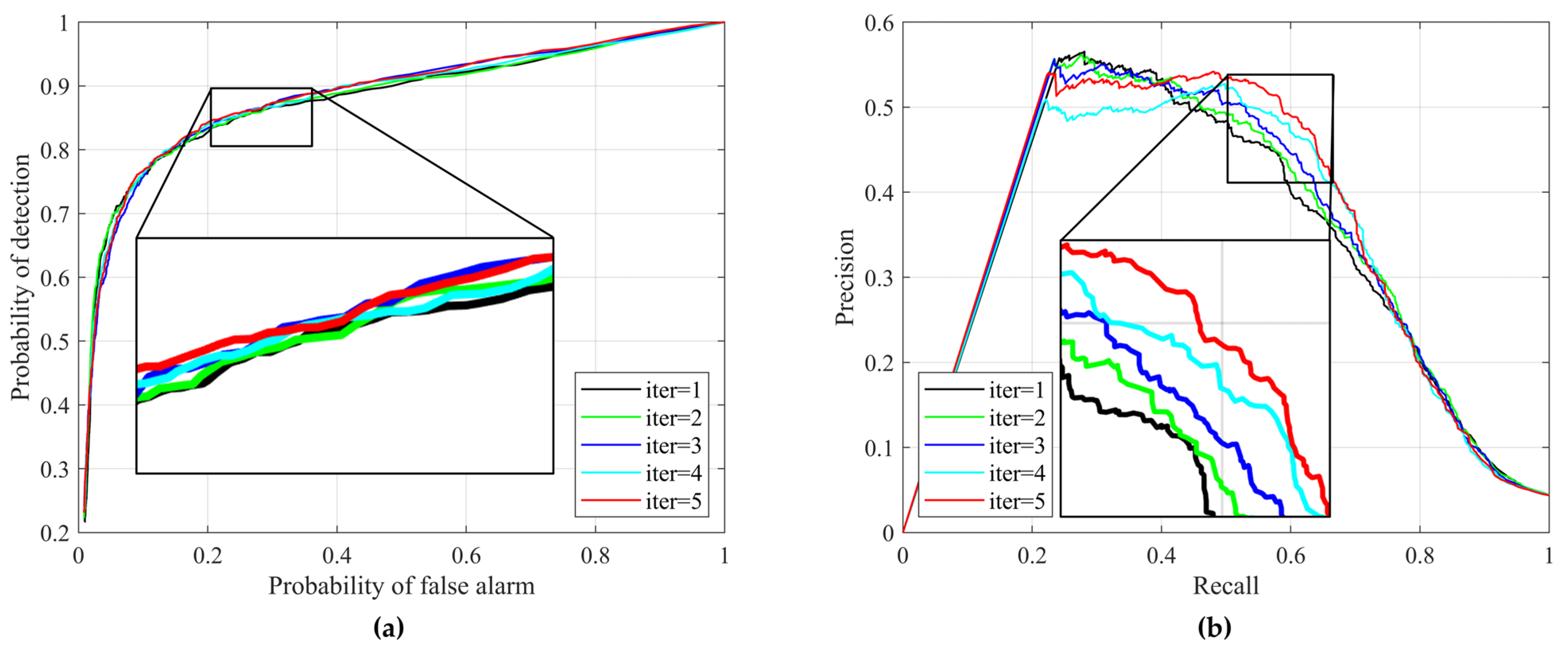
4.2.1. The Effectiveness of Iterative Graph Structure Enhancement
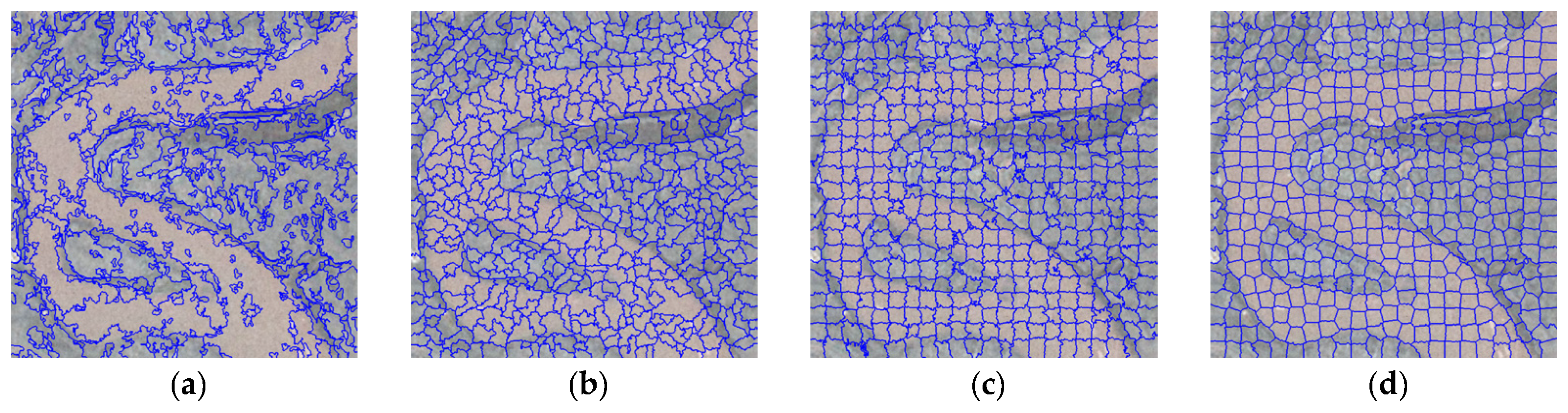
4.2.2. The Robustness of EGSR under Different Superpixel Segmentation Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Alwis Pitts, D.A.; So, E. Enhanced Change Detection Index for Disaster Response, Recovery Assessment and Monitoring of Buildings and Critical Facilities—A Case Study for Muzzaffarabad, Pakistan. Int. J. Appl. Earth Obs. Geoinf. 2017, 63, 167–177. [Google Scholar] [CrossRef]
- Decuyper, M.; Chávez, R.O.; Lohbeck, M.; Lastra, J.A.; Tsendbazar, N.; Hackländer, J.; Herold, M.; Vågen, T.-G. Continuous Monitoring of Forest Change Dynamics with Satellite Time Series. Remote Sens. Environ. 2022, 269, 112829. [Google Scholar] [CrossRef]
- Vetrivel, A.; Gerke, M.; Kerle, N.; Nex, F.; Vosselman, G. Disaster Damage Detection through Synergistic Use of Deep Learning and 3D Point Cloud Features Derived from Very High Resolution Oblique Aerial Images, and Multiple-Kernel-Learning. ISPRS J. Photogramm. Remote Sens. 2018, 140, 45–59. [Google Scholar] [CrossRef]
- Brunner, D.; Lemoine, G.; Bruzzone, L. Earthquake Damage Assessment of Buildings Using VHR Optical and SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2403–2420. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, L. Urban Change Analysis with Multi-Sensor Multispectral Imagery. Remote Sens. 2017, 9, 252. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, L.; Huang, X. Object-Oriented Change Detection Based on the Kolmogorov–Smirnov Test Using High-Resolution Multispectral Imagery. Int. J. Remote Sens. 2011, 32, 5719–5740. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, H.; Chen, K.; Zhou, C.; Chen, S.; Zou, Z.; Shi, Z. Continuous Cross-Resolution Remote Sensing Image Change Detection. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–20. [Google Scholar] [CrossRef]
- Cai, Z.; Jiang, Z.; Yuan, Y. Task-Related Self-Supervised Learning for Remote Sensing Image Change Detection. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6 June 2021; pp. 1535–1539. [Google Scholar]
- Liu, Z.; Li, G.; Mercier, G.; He, Y.; Pan, Q. Change Detection in Heterogenous Remote Sensing Images via Homogeneous Pixel Transformation. IEEE Trans. Image Process. 2018, 27, 1822–1834. [Google Scholar] [CrossRef]
- Chen, H.; He, F.; Liu, J. Heterogeneous Images Change Detection Based on Iterative Joint Global-Local Translation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9680–9698. [Google Scholar] [CrossRef]
- Sun, Y.; Lei, L.; Li, X.; Tan, X.; Kuang, G. Patch Similarity Graph Matrix-Based Unsupervised Remote Sensing Change Detection with Homogeneous and Heterogeneous Sensors. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4841–4861. [Google Scholar] [CrossRef]
- Gong, M.; Zhang, P.; Su, L.; Liu, J. Coupled Dictionary Learning for Change Detection from Multisource Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7077–7091. [Google Scholar] [CrossRef]
- Luppino, L.T.; Bianchi, F.M.; Moser, G.; Anfinsen, S.N. Unsupervised Image Regression for Heterogeneous Change Detection. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9960–9975. [Google Scholar] [CrossRef]
- Han, T.; Tang, Y.; Zou, B.; Feng, H.; Zhang, F. Heterogeneous Images Change Detection Method Based on Hierarchical Extreme Learning Machine Image Transformation. J. Geo-Inf. Sci. 2022, 24, 2212–2224. [Google Scholar] [CrossRef]
- Niu, X.; Gong, M.; Zhan, T.; Yang, Y. A Conditional Adversarial Network for Change Detection in Heterogeneous Images. IEEE Geosci. Remote Sens. Lett. 2019, 16, 45–49. [Google Scholar] [CrossRef]
- Liu, Z.-G.; Zhang, Z.-W.; Pan, Q.; Ning, L.-B. Unsupervised Change Detection from Heterogeneous Data Based on Image Translation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, F.; Yi, H.; Li, Y.; Chen, X. An Unsupervised Heterogeneous Change Detection Method Based on Image Translation Network and Post-Processing Algorithm. Int. J. Digit. Earth 2022, 15, 1056–1080. [Google Scholar] [CrossRef]
- Wu, Y.; Li, J.; Yuan, Y.; Qin, A.K.; Miao, Q.-G.; Gong, M.-G. Commonality Autoencoder: Learning Common Features for Change Detection from Heterogeneous Images. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 4257–4270. [Google Scholar] [CrossRef] [PubMed]
- Touati, R.; Mignotte, M.; Dahmane, M. Anomaly Feature Learning for Unsupervised Change Detection in Heterogeneous Images: A Deep Sparse Residual Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 588–600. [Google Scholar] [CrossRef]
- Li, X.; Du, Z.; Huang, Y.; Tan, Z. A Deep Translation (GAN) Based Change Detection Network for Optical and SAR Remote Sensing Images. ISPRS J. Photogramm. Remote Sens. 2021, 179, 14–34. [Google Scholar] [CrossRef]
- Han, T.; Tang, Y.; Yang, X.; Lin, Z.; Zou, B.; Feng, H. Change Detection for Heterogeneous Remote Sensing Images with Improved Training of Hierarchical Extreme Learning Machine (HELM). Remote Sens. 2021, 13, 4918. [Google Scholar] [CrossRef]
- Luppino, L.T.; Hansen, M.A.; Kampffmeyer, M.; Bianchi, F.M.; Moser, G.; Jenssen, R.; Anfinsen, S.N. Code-Aligned Autoencoders for Unsupervised Change Detection in Multimodal Remote Sensing Images. IEEE Trans. Neural Netw. Learn. Syst. 2022, 35, 65–72. [Google Scholar] [CrossRef] [PubMed]
- Su, L.; Gong, M.; Zhang, P.; Zhang, M.; Liu, J.; Yang, H. Deep Learning and Mapping Based Ternary Change Detection for Information Unbalanced Images. Pattern Recognit. 2017, 66, 213–228. [Google Scholar] [CrossRef]
- Liu, J.; Gong, M.; Qin, K.; Zhang, P. A Deep Convolutional Coupling Network for Change Detection Based on Heterogeneous Optical and Radar Images. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 545–559. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, Z.; Gong, M.; Liu, J. Discriminative Feature Learning for Unsupervised Change Detection in Heterogeneous Images Based on a Coupled Neural Network. IEEE Trans. Geosci. Remote Sens. 2017, 55, 7066–7080. [Google Scholar] [CrossRef]
- Ma, W.; Xiong, Y.; Wu, Y.; Yang, H.; Zhang, X.; Jiao, L. Change Detection in Remote Sensing Images Based on Image Mapping and a Deep Capsule Network. Remote Sens. 2019, 11, 626. [Google Scholar] [CrossRef]
- Yang, M.; Liu, F.; Jian, M. DPFL-Nets: Deep Pyramid Feature Learning Networks for Multiscale Change Detection. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6402–6416. [Google Scholar] [CrossRef]
- Han, T.; Tang, Y.; Chen, Y. Heterogeneous Image Change Detection Based on Two-Stage Joint Feature Learning. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 3215–3218. [Google Scholar]
- Zhan, T.; Gong, M.; Jiang, X.; Li, S. Log-Based Transformation Feature Learning for Change Detection in Heterogeneous Images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1352–1356. [Google Scholar] [CrossRef]
- Prendes, J.; Chabert, M.; Pascal, F.; Giros, A.; Tourneret, J.-Y. A New Multivariate Statistical Model for Change Detection in Images Acquired by Homogeneous and Heterogeneous Sensors. IEEE Trans. Image Process. 2015, 24, 799–812. [Google Scholar] [CrossRef]
- Touati, R.; Mignotte, M.; Dahmane, M. Multimodal Change Detection in Remote Sensing Images Using an Unsupervised Pixel Pairwise-Based Markov Random Field Model. IEEE Trans. Image Process. 2020, 29, 757–767. [Google Scholar] [CrossRef]
- Touati, R.; Mignotte, M. An Energy-Based Model Encoding Nonlocal Pairwise Pixel Interactions for Multisensor Change Detection. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1046–1058. [Google Scholar] [CrossRef]
- Wan, L.; Zhang, T.; You, H.J. Multi-Sensor Remote Sensing Image Change Detection Based on Sorted Histograms. Int. J. Remote Sens. 2018, 39, 3753–3775. [Google Scholar] [CrossRef]
- Jimenez-Sierra, D.A.; Benítez-Restrepo, H.D.; Vargas-Cardona, H.D.; Chanussot, J. Graph-Based Data Fusion Applied to: Change Detection and Biomass Estimation in Rice Crops. Remote Sens. 2020, 12, 2683. [Google Scholar] [CrossRef]
- Sun, Y.; Lei, L.; Li, X.; Sun, H.; Kuang, G. Nonlocal Patch Similarity Based Heterogeneous Remote Sensing Change Detection. Pattern Recognit. 2021, 109, 107598. [Google Scholar] [CrossRef]
- Sun, Y.; Lei, L.; Li, X.; Tan, X.; Kuang, G. Structure Consistency-Based Graph for Unsupervised Change Detection with Homogeneous and Heterogeneous Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4700221. [Google Scholar] [CrossRef]
- Sun, Y.; Lei, L.; Tan, X.; Guan, D.; Wu, J.; Kuang, G. Structured Graph Based Image Regression for Unsupervised Multimodal Change Detection. ISPRS J. Photogramm. Remote Sens. 2022, 185, 16–31. [Google Scholar] [CrossRef]
- Sun, Y.; Lei, L.; Guan, D.; Li, M.; Kuang, G. Sparse-Constrained Adaptive Structure Consistency-Based Unsupervised Image Regression for Heterogeneous Remote-Sensing Change Detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4405814. [Google Scholar] [CrossRef]
- Sun, Y.; Lei, L.; Guan, D.; Kuang, G. Iterative Robust Graph for Unsupervised Change Detection of Heterogeneous Remote Sensing Images. IEEE Trans. Image Process. 2021, 30, 6277–6291. [Google Scholar] [CrossRef]
- Chen, H.; Yokoya, N.; Wu, C.; Du, B. Unsupervised Multimodal Change Detection Based on Structural Relationship Graph Representation Learning. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5635318. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef]
- Ortega, A.; Frossard, P.; Kovačević, J.; Moura, J.M.F.; Vandergheynst, P. Graph Signal Processing: Overview, Challenges, and Applications. Proc. IEEE 2018, 106, 808–828. [Google Scholar] [CrossRef]
- Bezdek, J.C.; Ehrlich, R.; Full, W. FCM: The Fuzzy c-Means Clustering Algorithm. Comput. Geosci. 1984, 10, 191–203. [Google Scholar] [CrossRef]
- Felzenszwalb, P.F.; Huttenlocher, D.P. Efficient Graph-Based Image Segmentation. Int. J. Comput. Vis. 2004, 59, 167–181. [Google Scholar] [CrossRef]
- Vedaldi, A.; Soatto, S. Quick Shift and Kernel Methods for Mode Seeking. In Computer Vision—ECCV 2008; Forsyth, D., Torr, P., Zisserman, A., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5305, pp. 705–718. ISBN 978-3-540-88692-1. [Google Scholar]
- Neubert, P.; Protzel, P. Compact Watershed and Preemptive SLIC: On Improving Trade-Offs of Superpixel Segmentation Algorithms. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 996–1001. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Sensor | Size (Pixels) | Date | Location | Event (and Spatial Resolution) |
|---|---|---|---|---|---|
| #1 | Google Earth/Sentinel-1 | 600 × 600 × 3(1) | December 1999–November 2017 | Chongqing, China | River expansion (10 m) |
| #2 | Pleiades/WorldView2 | 2000 × 2000 × 3(3) | May 2012–July 2013 | Toulouse, France | Urban construction (0.52 m) |
| #3 | Landsat-8/Sentinel-1 | 3500 × 2000 × 11(3) | January 2017–February 2017 | Sutter County, CA, USA | Flooding (≈15 m) |
| #4 | Sentinel-2/Sentinel-1 | 444 × 571 × 3(1) | April 2017–October 2020 | Lake Poyang, China | Lake expansion (10 m) |
| #5 | Zi-Yuan 3 | 458 × 559 × 3 | 2014–2016 | Wuhan, China | Urban construction (5.8 m) |
| #6 | Sentinel-1 | 898 × 1500 × 1 | November 2017–May 2018 | Chongqing, China | River expansion (10 m) |
| Measures | #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|---|
| AUR | 0.8545 | 0.8169 | 0.8835 | 0.8965 | 0.8324 | 0.8586 |
| AUP | 0.7069 | 0.5497 | 0.3495 | 0.6674 | 0.4354 | 0.5378 |
| Methods | #1 | #2 | #3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| OA | KC | F1 | OA | KC | F1 | OA | KC | F1 | |
| LTFL | 0.9204 | 0.7119 | 0.7579 | 0.6800 | 0.2181 | 0.3862 | 0.8504 | 0.0631 | 0.1240 |
| INLPG | 0.9083 | 0.5635 | 0.6092 | 0.8171 | 0.3395 | 0.4482 | 0.9059 | 0.3730 | 0.4128 |
| GBF | 0.8989 | 0.5530 | 0.6109 | 0.8261 | 0.2155 | 0.3105 | 0.7915 | 0.1093 | 0.1737 |
| IRG-McS | 0.9128 | 0.6022 | 0.6483 | 0.8685 | 0.4239 | 0.4973 | 0.9469 | 0.4703 | 0.4975 |
| SCASC | 0.8955 | 0.5069 | 0.5599 | 0.8918 | 0.4711 | 0.5247 | 0.9381 | 0.4585 | 0.4888 |
| SRGCAE | 0.9223 | 0.6812 | 0.7259 | 0.8231 | 0.3817 | 0.4867 | 0.9376 | 0.4246 | 0.4557 |
| GIR-MRF | 0.9037 | 0.5913 | 0.6457 | 0.8960 | 0.4840 | 0.5350 | 0.9446 | 0.4674 | 0.4954 |
| EGSR | 0.9366 | 0.7329 | 0.7689 | 0.8973 | 0.5029 | 0.5544 | 0.9465 | 0.4784 | 0.5056 |
| Methods | #4 | #5 | #6 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| OA | KC | F1 | OA | KC | F1 | OA | KC | F1 | |
| LTFL | 0.7016 | 0.1490 | 0.2600 | 0.9051 | 0.4092 | 0.4598 | 0.9550 | 0.6188 | 0.6428 |
| INLPG | 0.9148 | 0.5426 | 0.5879 | 0.8851 | 0.4500 | 0.5138 | 0.9659 | 0.6448 | 0.6621 |
| GBF | 0.8300 | 0.3458 | 0.4231 | 0.6240 | 0.1439 | 0.2845 | 0.6636 | 0.1185 | 0.2087 |
| IRG-McS | 0.9450 | 0.4948 | 0.5182 | 0.9203 | 0.4024 | 0.4365 | 0.9591 | 0.5579 | 0.5782 |
| SCASC | 0.9537 | 0.6443 | 0.6684 | 0.9090 | 0.3035 | 0.3407 | 0.9528 | 0.4745 | 0.4974 |
| SRGCAE | 0.8354 | 0.3585 | 0.4339 | 0.8354 | 0.1958 | 0.2874 | 0.9592 | 0.5212 | 0.5399 |
| GIR-MRF | 0.9481 | 0.6398 | 0.6678 | 0.9171 | 0.3950 | 0.4321 | 0.9554 | 0.5796 | 0.6031 |
| EGSR | 0.9611 | 0.7072 | 0.7277 | 0.9184 | 0.4673 | 0.5094 | 0.9676 | 0.6594 | 0.6758 |
| Measures | iter = 1 | iter = 2 | iter = 3 | iter = 4 | iter = 5 |
|---|---|---|---|---|---|
| OA | 0.9088 | 0.9296 | 0.9412 | 0.9459 | 0.9465 |
| KC | 0.4339 | 0.4451 | 0.4605 | 0.4787 | 0.4784 |
| F1 | 0.4670 | 0.4943 | 0.4897 | 0.5065 | 0.5056 |
| AUR | 0.8769 | 0.8782 | 0.8804 | 0.8817 | 0.8835 |
| AUP | 0.3329 | 0.3366 | 0.3394 | 0.3415 | 0.3495 |
| Methods | Felzenszwalb | Quickshift | Watershed | SLIC | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OA | KC | F1 | OA | KC | F1 | OA | KC | F1 | OA | KC | F1 | |
| #1 | 0.9602 | 0.7033 | 0.7243 | 0.9353 | 0.7293 | 0.7662 | 0.9345 | 0.7239 | 0.7610 | 0.9366 | 0.7329 | 0.7689 |
| #2 | 0.8921 | 0.4787 | 0.5331 | 0.8882 | 0.4734 | 0.5317 | 0.8909 | 0.4906 | 0.5480 | 0.8973 | 0.5029 | 0.5544 |
| #3 | 0.9407 | 0.4701 | 0.4994 | 0.9446 | 0.4674 | 0.4954 | 0.9407 | 0.4701 | 0.4994 | 0.9465 | 0.4784 | 0.5056 |
| #4 | 0.9589 | 0.6930 | 0.7147 | 0.9573 | 0.6920 | 0.7149 | 0.9600 | 0.7104 | 0.7318 | 0.9611 | 0.7072 | 0.7277 |
| #5 | 0.9120 | 0.4433 | 0.4897 | 0.9163 | 0.4507 | 0.4936 | 0.9149 | 0.4518 | 0.4962 | 0.9184 | 0.4673 | 0.5094 |
| #6 | 0.9669 | 0.6510 | 0.6678 | 0.9653 | 0.6351 | 0.6527 | 0.9660 | 0.6413 | 0.6585 | 0.9676 | 0.6594 | 0.6758 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Yang, X.; Han, T.; Zhang, F.; Zou, B.; Feng, H. Enhanced Graph Structure Representation for Unsupervised Heterogeneous Change Detection. Remote Sens. 2024, 16, 721. https://doi.org/10.3390/rs16040721
Tang Y, Yang X, Han T, Zhang F, Zou B, Feng H. Enhanced Graph Structure Representation for Unsupervised Heterogeneous Change Detection. Remote Sensing. 2024; 16(4):721. https://doi.org/10.3390/rs16040721
Chicago/Turabian StyleTang, Yuqi, Xin Yang, Te Han, Fangyan Zhang, Bin Zou, and Huihui Feng. 2024. "Enhanced Graph Structure Representation for Unsupervised Heterogeneous Change Detection" Remote Sensing 16, no. 4: 721. https://doi.org/10.3390/rs16040721
APA StyleTang, Y., Yang, X., Han, T., Zhang, F., Zou, B., & Feng, H. (2024). Enhanced Graph Structure Representation for Unsupervised Heterogeneous Change Detection. Remote Sensing, 16(4), 721. https://doi.org/10.3390/rs16040721