
Analysis of the Ranging Capability of a Space Debris Laser Ranging System Based on the Maximum Detection Distance Model

Abstract
:
1. Introduction
- (1)
- Photon number: the number of photons of the 1064 nm wavelength laser with the same single-pulse energy is twice that of the 532 nm wavelength laser;
- (2)
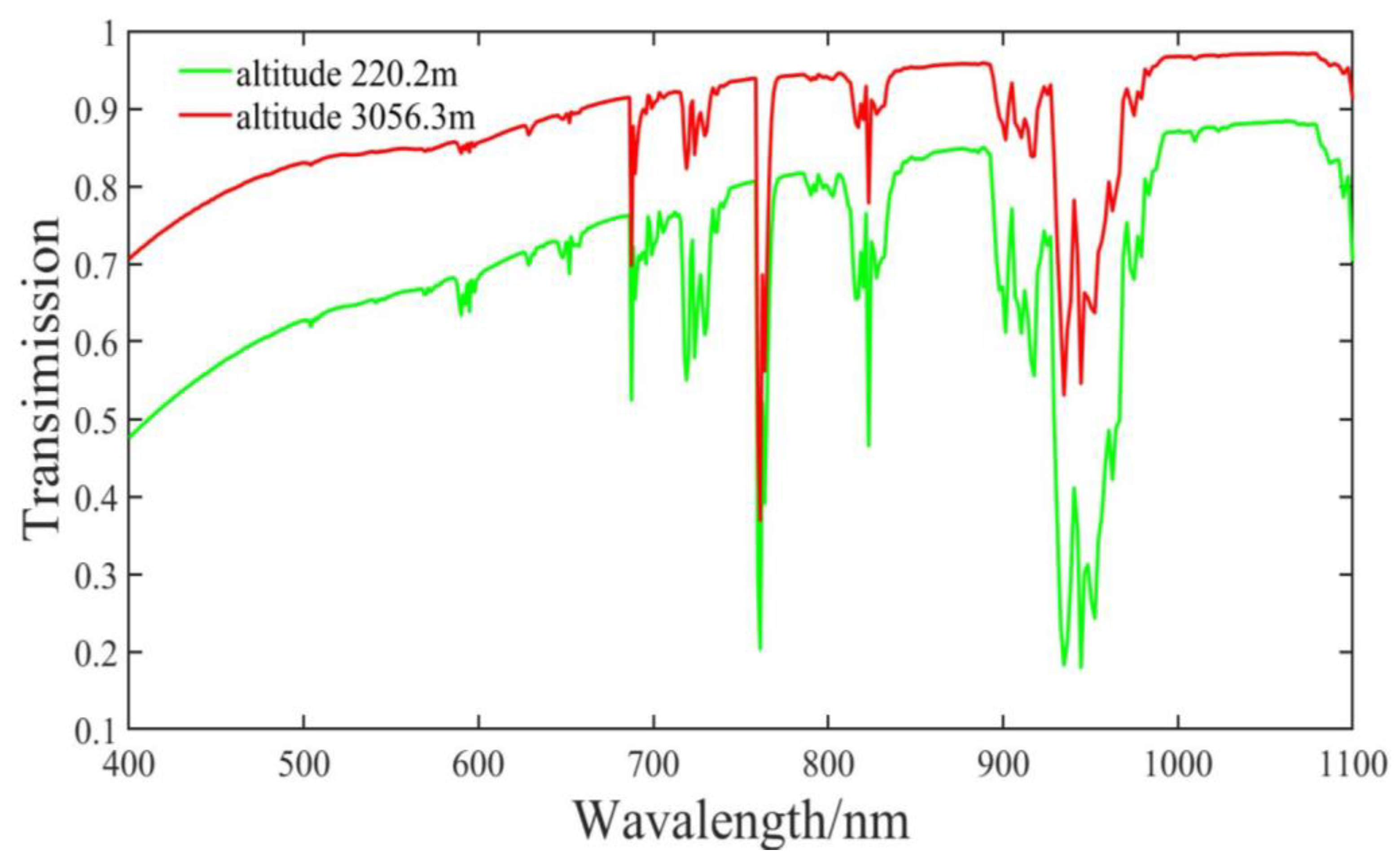
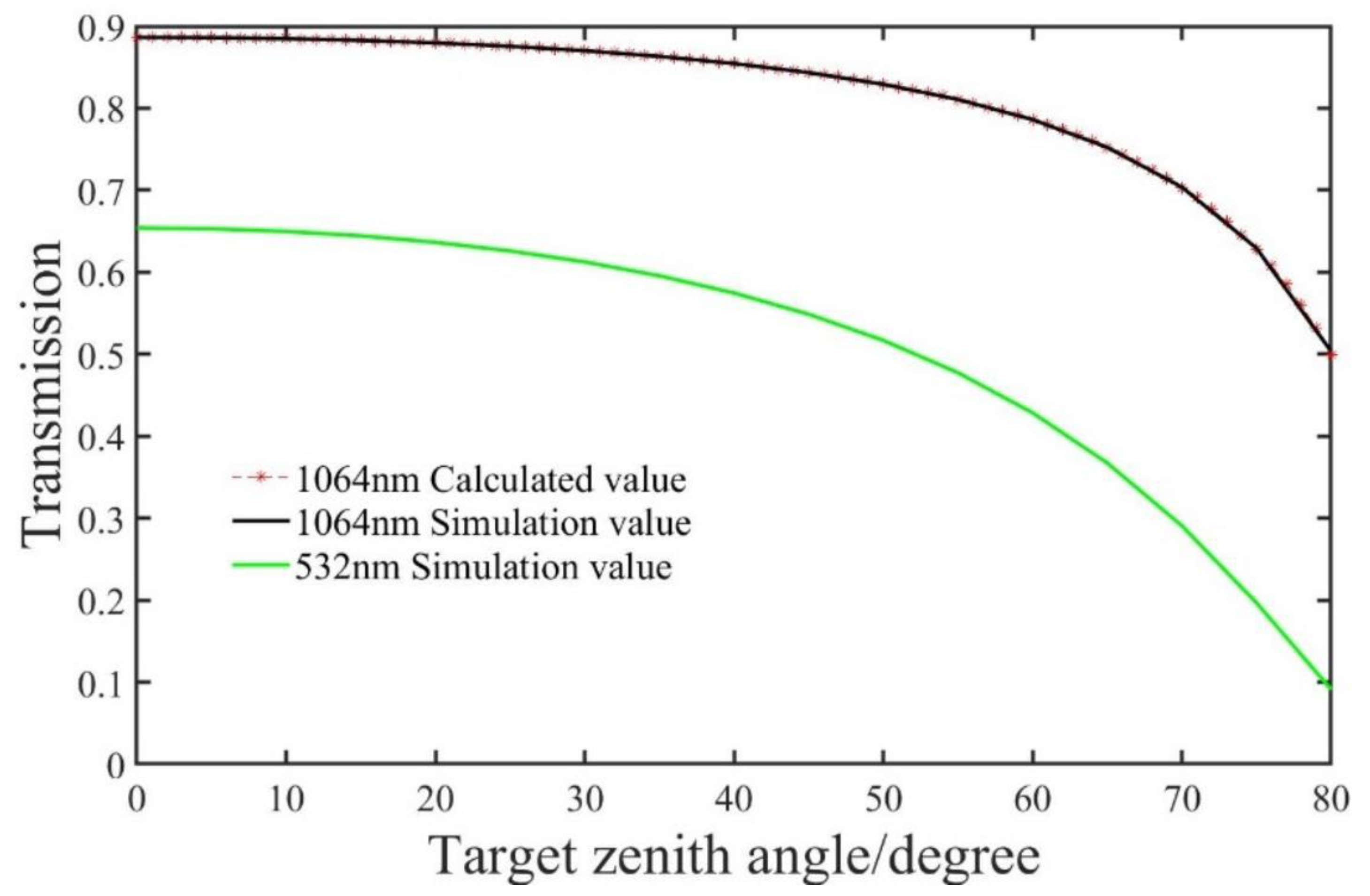
- Atmospheric transmission: according to the theory of atmospheric scattering and absorption, the transmission of near-infrared (NIR) light is higher than that of visible light, especially at a low elevation angle;
- (3)
- Laser emission power: the 532 nm wavelength laser is generated by the 1064 nm wavelength laser through the frequency multiplier, and the frequency multiplier efficiency is about 50%; so, for the same laser, the power of the 1064 nm wavelength laser is about twice that of the 532 nm wavelength laser;
- (4)
- Daytime range: the 1064 nm wavelength light is one order of magnitude lower than the sky background noise intensity at 532 nm wavelength light.
2. Establishment of the Maximum Detection Range Model
3. Analysis of the Influencing Factors
3.1. Analysis of the Influencing Factors of Atmospheric Transmission
3.1.1. Altitude
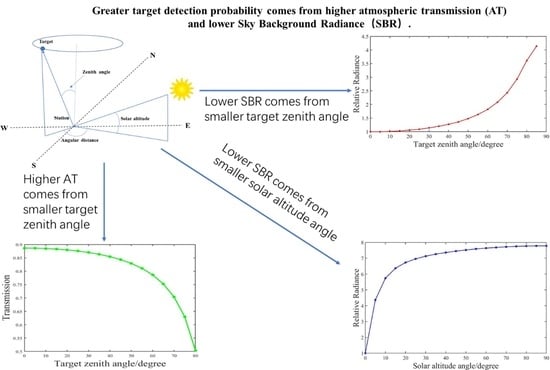
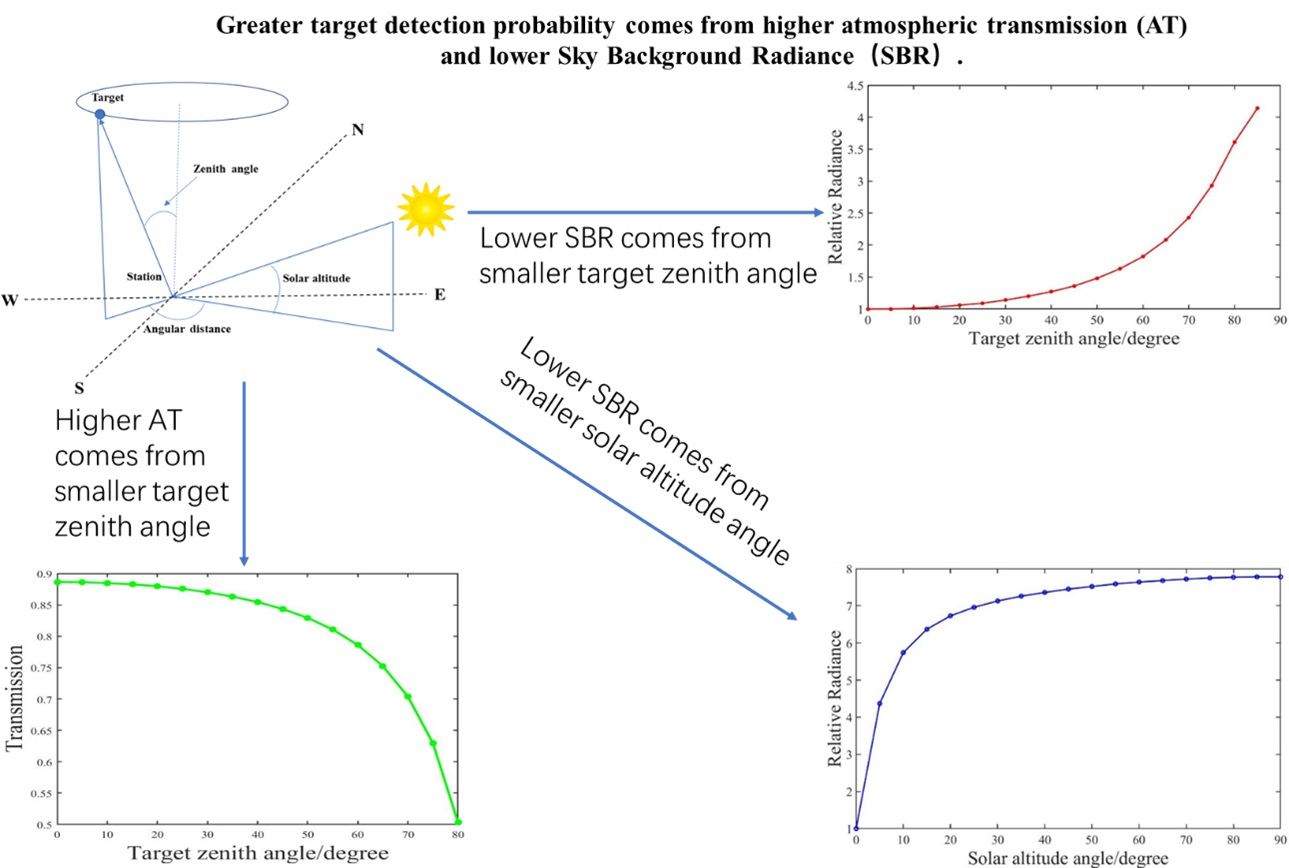
3.1.2. Target Zenith Angle
3.2. Analysis of the Influencing Factors of SKR
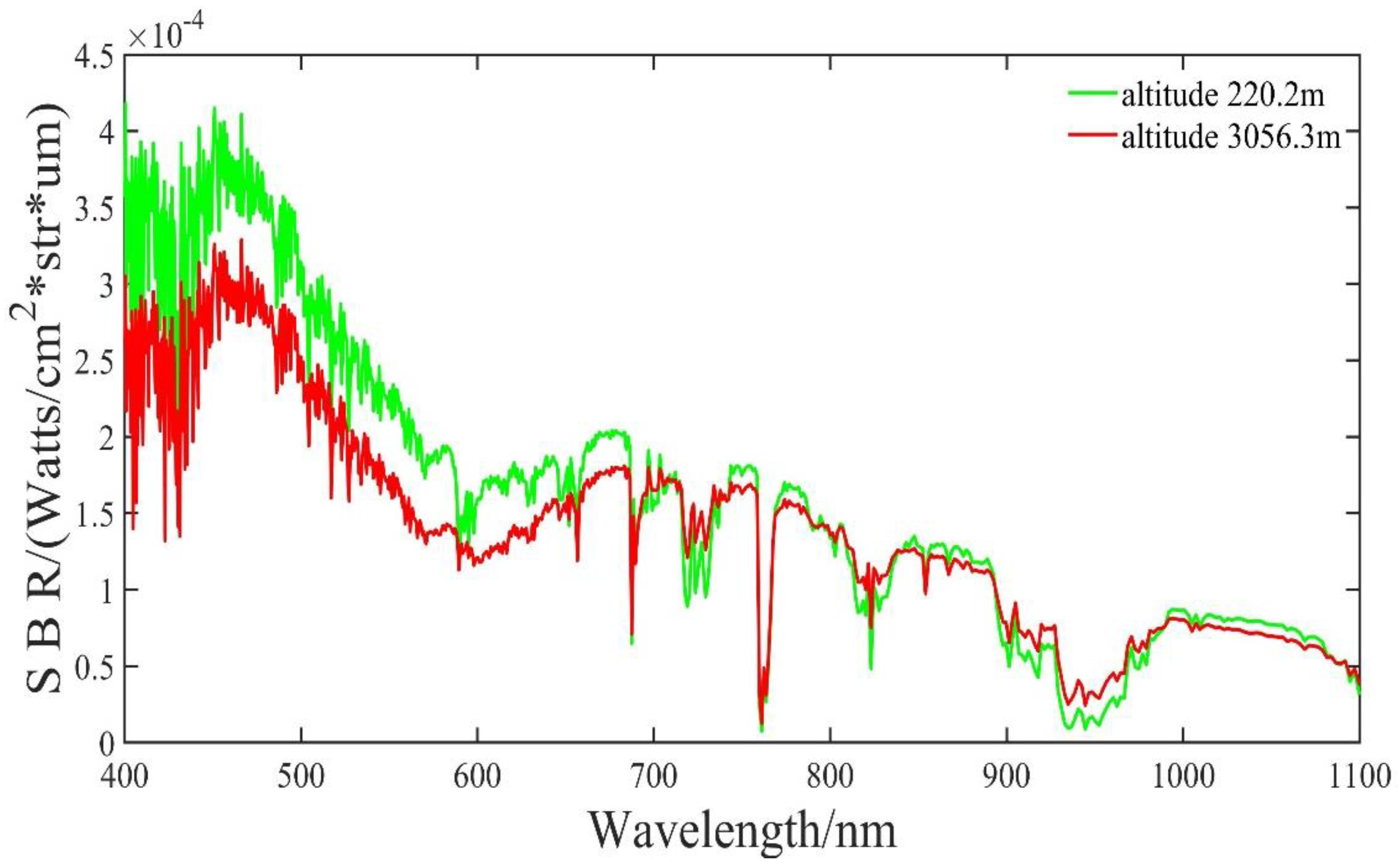
3.2.1. Altitude
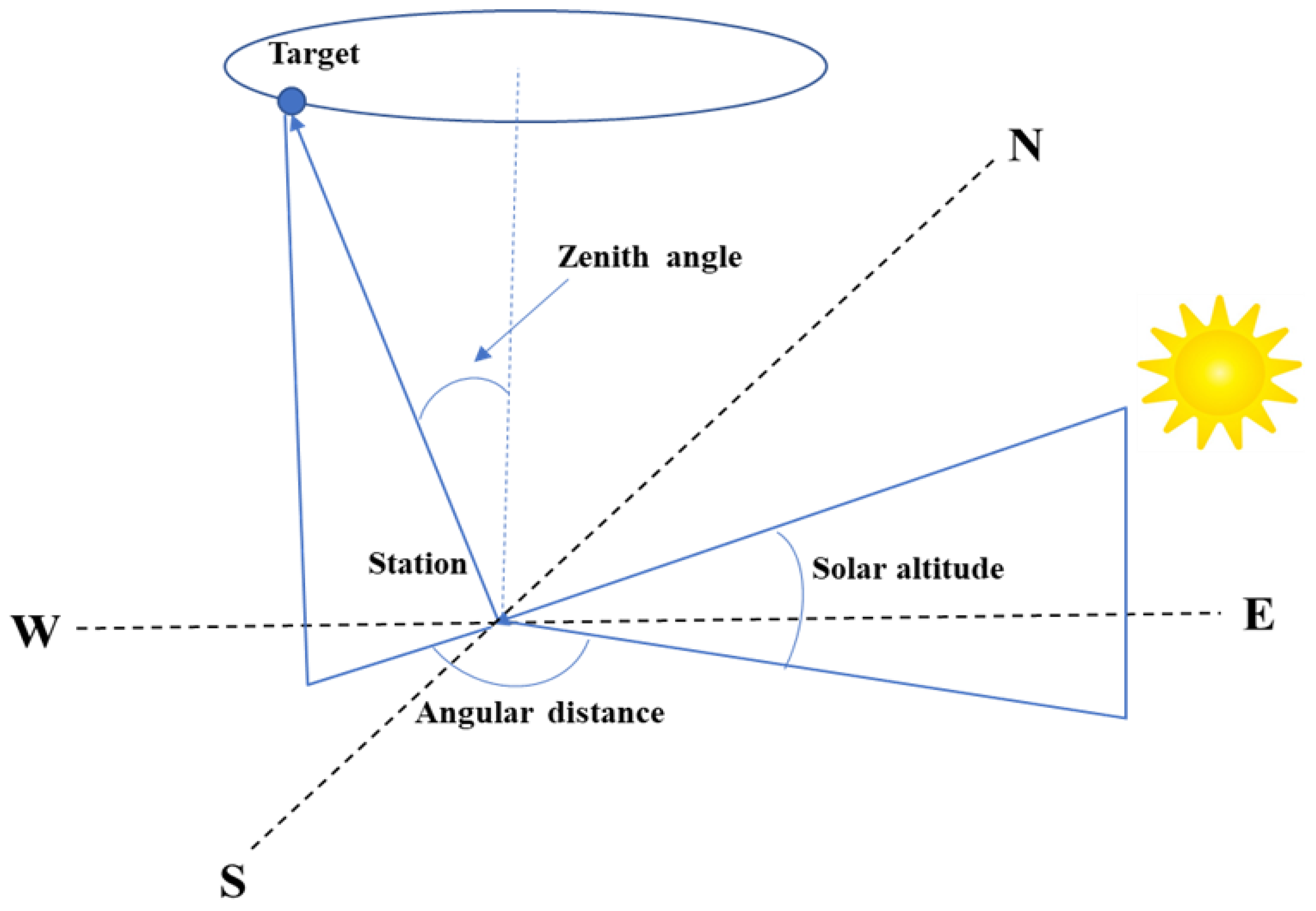
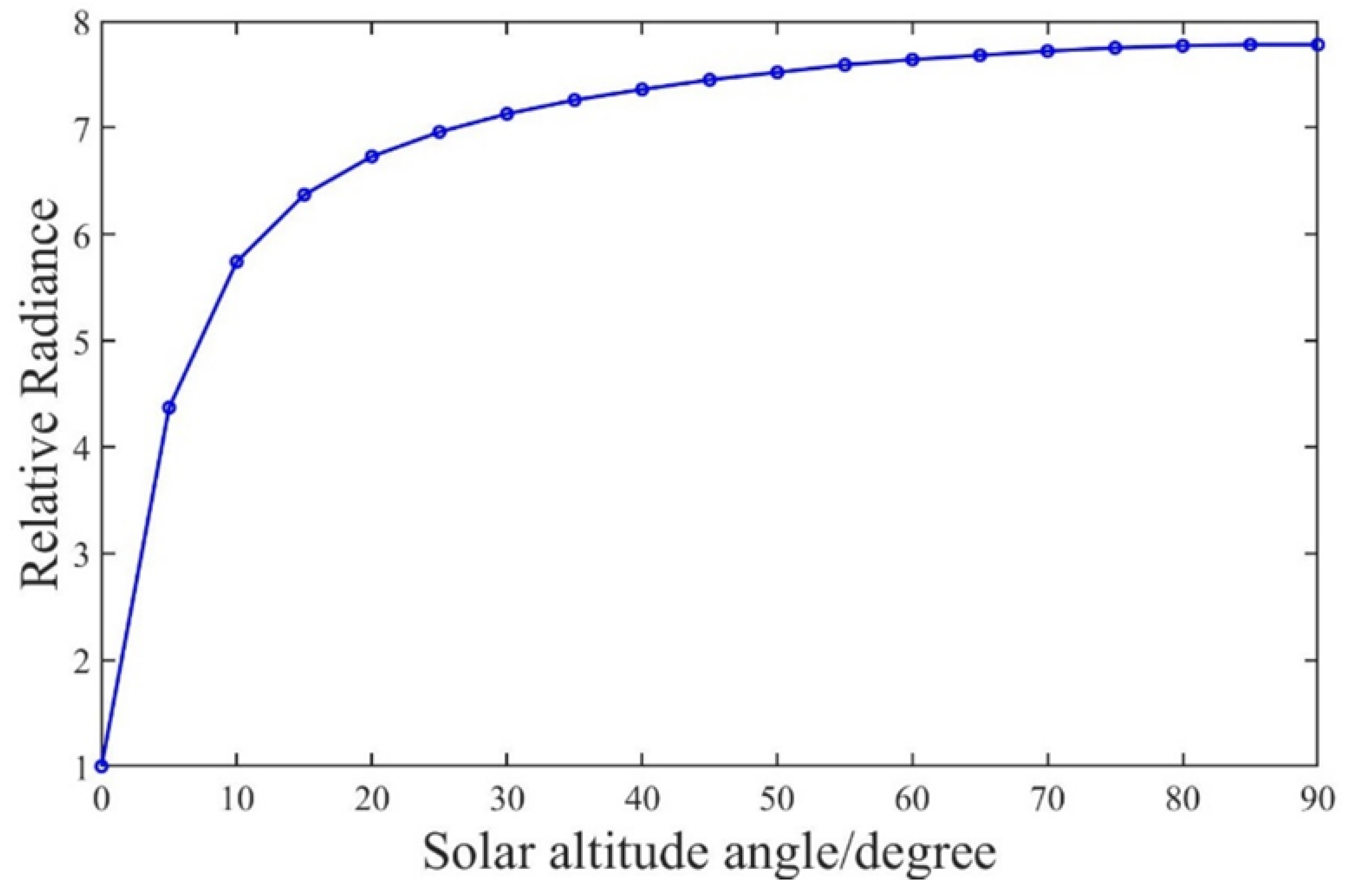
3.2.2. Solar Altitude Angle
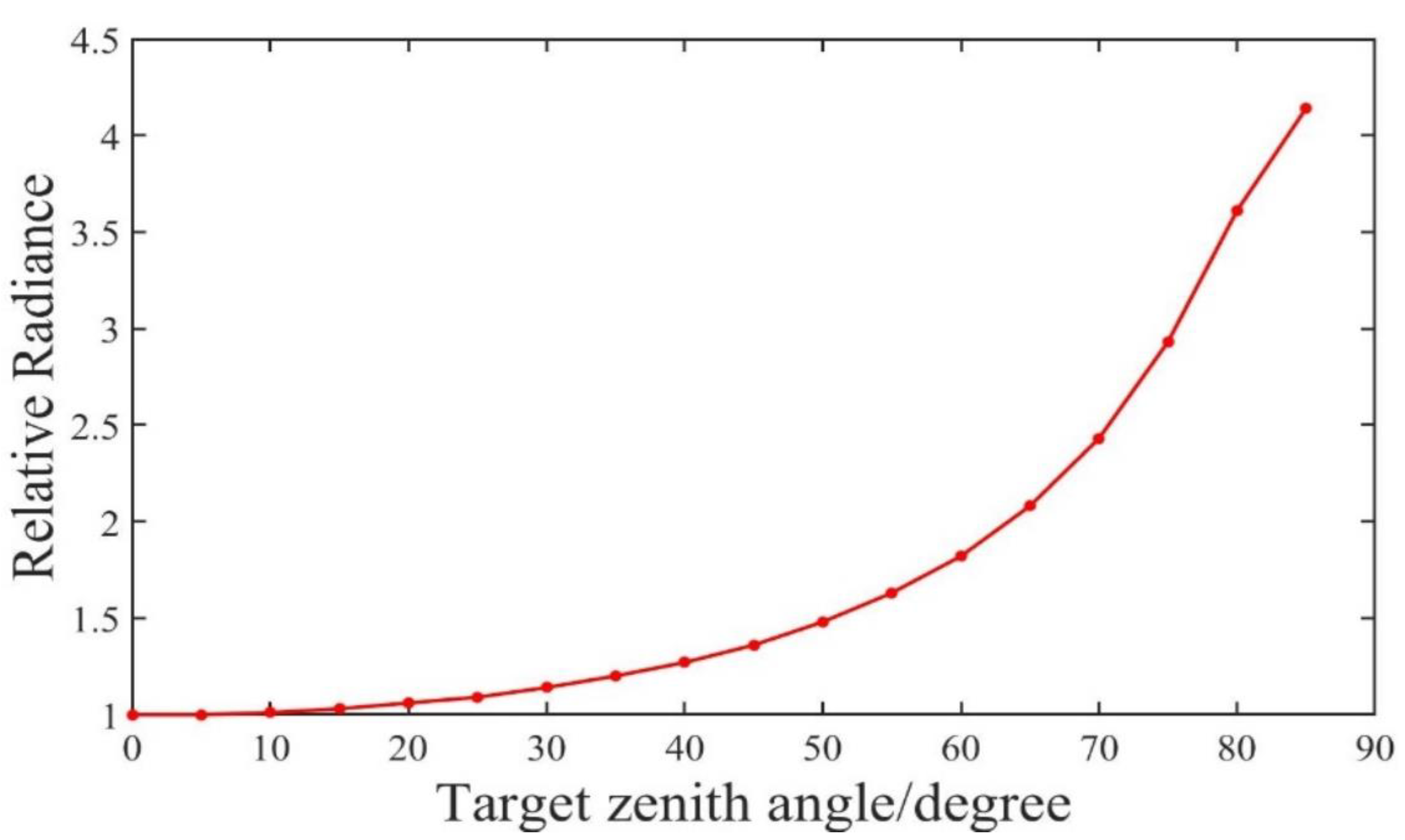
3.2.3. Target Zenith Angle
3.2.4. Angular Distance
4. Experiment and Model Verification
4.1. Experiment
4.2. Model Verification
- (1)
- In the estimation process, it was assumed that the laser was normally incident on the space debris, while in the actual measurement, the normal incident laser cannot be guaranteed;
- (2)
- In the estimation process, the average or typical values of laser reflectivity and other parameters of the debris were used, but the parameter values of the different debris targets were different;
- (3)
- The shape of space debris was different. Space debris was mostly diffused reflectors with irregular shapes, and the flatness of the reflecting surfaces was also very different;
- (4)
- The space debris was in a spin state in the space, which increased the uncertainty of the relative position of the laser and the reflector in the actual measurement.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wei, D.; Zhao, C.Y. Analysis on the accuracy of the SGP4/SDP4 model. Acta Astron. Sin. 2009, 50, 332–339. [Google Scholar]
- Zhang, Z.P.; Cheng, Z.E.; Zhang, H.F.; Deng, H.R.; Jiang, H. Observation of space debris by ground-based laser ranging system and research on detecting ability. Infrared Laser Eng. 2017, 46, 15–21. [Google Scholar]
- Meng, W.D.; Zhang, H.F.; Deng, H.R.; Tang, K.; Wu, Z.B.; Wang, Y.R.; Wu, G.; Zhang, Z.P.; Chen, X.Y. 1.06 μm wavelength based high accuracy satellite laser ranging and space debris detection. Acta Phys. Sin. 2020, 69, 1. [Google Scholar] [CrossRef]
- Wang, N.; Deng, H.R.; Zhang, H.F.; Wu, Z.B.; Zhang, Z.P. Daytime background noise analysis and application research in1064 nm band. Laser Infrared 2019, 49, 1190–1194. [Google Scholar]
- Craig, H.S.; Greene, B. The EOS space debris tracking system. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Wailea, Maui, HI, USA, 10–14 September 2006. [Google Scholar]
- Kirchner, G.; Koidl, F.; Kucharski, D.; Ploner, M.; Riede, W.; Voelker, U.; Buske, I.; Friederich, F.; Baur, O.; Krauss, S.; et al. Space debris laser ranging at Graz. In Proceedings of the 6th European Conference on Space Debris, Darmstadt, Germany, 22–25 April 2013; Volume 723, p. 9. [Google Scholar]
- Tang, R.F.; Zhai, D.S.; Zhang, H.T.; Pi, X.Y.; Li, C.X.; Fu, H.L.; Li, R.W.; Li, Z.L.; Li, Y.Q. Research Progress in space debris laser ranging. Space Debris Res. 2020, 20, 21–30. [Google Scholar]
- Lejba, P.; Suchodolski, T.; Michałek, P.; Bartoszak, J.; Schillak, S.; Zapaśnik, S. First laser measurements to space debris in Poland. Adv. Space Res. 2018, 61, 2609–2616. [Google Scholar] [CrossRef]
- Sproll, F.; Hampf, D.; Wagner, P.; Riede, W.; Eckl, J.; Riepl, S.; Schreiber, U.; Bamann, C.; Hugentobler, U.; Kirchner, G.; et al. Two-color and multistatic space debris laser tracking. In Proceedings of the 20th International Workshop on Laser Ranging, Potsdam, Germany, 9–14 October 2016. [Google Scholar]
- Li, Z.L.; Zhai, D.S.; Zhang, H.T.; Pi, X.Y.; Fu, H.L.; Li, R.W.; Li, P.F.; Zhang, L.B.; Li, Y.Q. Superconductivity detector applied to daytime satellite laser ranging experiment and research. Infrared Laser Eng. 2020, 49, 127–132. [Google Scholar]
- Dong, X.; Han, X.W.; Song, Q.L.; Liang, Z.P.; Fan, C.B.; Zhang, H.T. Research of space debris laser ranging system. Infrared Laser Eng. 2016, 45, 40–45. [Google Scholar]
- Liu, K.; Cui, Z.Z. Research on the maximum detection range in pulse laser detection. Opt. Tech. 2011, 37, 143–147. [Google Scholar]
- Gao, S.F.; He, M.L.; Wang, Z.; Zhang, M.; Wu, P.; Zhang, G.B. Estimation of the Detection Distance of Infrared Target. Infrared 2008, 29, 21–24. [Google Scholar]
- Zhang, J.H.; Yao, D.S.; Tan, B. Analysis on Effect Factors of Ground-Based Electro-Optic System Detection Ability on Space Object. Acta Opt. Sin. 2008, 28, 1178–1182. [Google Scholar] [CrossRef]
- Liu, J. Study on Diffuse Laser Ranging. Master’s Thesis, Yunnan Observatories, Chinese Academy of Sciences, Yunnan, China, 2007. [Google Scholar]
- Lv, B.T.; An, N.; Han, X.W.; Cheng, C.; Feng, X.H.; Zhang, Y.D.; Gao, J.; Song, Q.L.; Liu, C.Z. Research on SLR Echo Characteristics Based on Lidar Atmospheric Correction Model. Acta Opt. Sin. 2024, 44, 1201007. [Google Scholar]
- An, N.; Chen, Y.F.; Liu, C.Z.; Fan, C.B.; Liu, Y.; Song, Q.L.; Wen, G.Y. Maximum Detection Range of Satellite Laser Ranging System Based on Characteristics of Laser Transmission in Atmosphere. Acta Opt. Sin. 2018, 38, 23–28. [Google Scholar]
- Sun, F.Y. Study on the Characteristic of the Whole Sky Background Radiation. Master’s Thesis, University of Science and Technology of China, Hefei, China, 2016. [Google Scholar]
- Liu, Z.X. Research on Sky Background Spectral Radiance Measuring System for Self-Adapting Object Track. Master’s Thesis, University of Chinese Academy of Sciences, Beijing, China, 2012. [Google Scholar]
- Shell, J.R. Optimizing orbital debris monitoring with optical telescopes. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 14–17 September 2010; p. E42. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Name | Value |
|---|---|---|
| Wavelength | /nm | 1064 |
| Quantum efficiency of SPAD | ηq | 0.2 |
| Single-pulse energy emitted by the laser | /J | 0.4 |
| Effective area of the receiving telescope | /m2 | 1.079 |
| The angle between the laser incident angle and the normal of the debris surface | /(°) | 0 |
| Atmospheric transmission | - | |
| SBR of the 1064 nm laser | /(W/cm2·str·µm) | - |
| Transmission efficiency of the emitting system | 0.8 | |
| Transmission efficiency of the receiver system | 0.6 | |
| Divergence angle of the emitting laser beam | /(″) | 10 |
| Receiving field angle of view | /(″) | 8 |
| Gate width | /µs | 7 |
| The ratio of the transmission band of the interference filter to the response band of the receiving device | 1/667 | |
| Planck constant | /(J·s) | 6.63 × 10−34 |
| Velocity of the laser | /(m/s) | 3 × 108 |
| Effective reflection area of space debris | /m2 | ~=RCS |
| Reflection of space debris (rms) | 0.18 | |
| Atmospheric attenuation factor | /dB | 13 |
| Date | Norad ID | RCS/m2 | Orbit Perigee × Apogee/km | MDR Simulation Value/m | Measured Value/m | Error Rate |
|---|---|---|---|---|---|---|
| 27 March 2023 | 13028 | 4.398 | 749 × 776 | 937,224.0 | 872,961.5 | 7.36% |
| 27 March 2023 | 22285 | 8.8221 | 838 × 846 | 1,111,983.9 | 1,078,370.9 | 3.12% |
| 28 March 2023 | 16612 | 4.337 | 601 × 627 | 942,529.6 | 859,844.6 | 9.62% |
| 28 March 2023 | 21820 | 5.2429 | 436 × 2976 | 976,334.0 | 959,765.2 | 1.73% |
| 28 March 2023 | 22285 | 8.8221 | 838 × 846 | 1,171,330.3 | 954,567.6 | 22.71% |
| 28 March 2023 | 23405 | 8.6716 | 838 × 844 | 1,124,239.5 | 1,013,501.2 | 10.93% |
| 28 March 2023 | 24797 | 10.1469 | 582 × 901 | 1,155,082.4 | 859,912.1 | 34.33% |
| 28 March 2023 | 39069 | 3.3329 | 243 × 479 | 874,450.4 | 847,999.9 | 3.12% |
| 28 March 2023 | 39211 | 7.9642 | 454 × 606 | 1,067,440.2 | 933,777.7 | 14.31% |
| 1 April 2023 | 11608 | 6.5623 | 832 × 913 | 1,048,571.5 | 980,871.2 | 6.90% |
| 1 April 2023 | 16612 | 4.337 | 601 × 627 | 911,069.1 | 731,724.9 | 24.51% |
| 1 April 2023 | 16615 | 7.0057 | 776 × 792 | 1,102,689.8 | 926,141.1 | 19.06% |
| 1 April 2023 | 23324 | 6.2884 | 793 × 877 | 992,900.5 | 879,063.7 | 12.95% |
| 1 April 2023 | 39015 | 6.4763 | 828 × 1358 | 1,075,056.9 | 892,550.4 | 20.45% |
| 1 April 2023 | 39016 | 10.051 | 826 × 1358 | 1,173,642.4 | 1,038,042.9 | 13.06% |
| 1 April 2023 | 39261 | 8.0334 | 757 × 803 | 1,059,309.8 | 902,523.5 | 17.37% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Wen, G.; Fan, C.; Guan, B.; Song, Q.; Liu, C.; Wang, S. Analysis of the Ranging Capability of a Space Debris Laser Ranging System Based on the Maximum Detection Distance Model. Remote Sens. 2024, 16, 727. https://doi.org/10.3390/rs16040727
Zhang M, Wen G, Fan C, Guan B, Song Q, Liu C, Wang S. Analysis of the Ranging Capability of a Space Debris Laser Ranging System Based on the Maximum Detection Distance Model. Remote Sensing. 2024; 16(4):727. https://doi.org/10.3390/rs16040727
Chicago/Turabian StyleZhang, Mingliang, Guanyu Wen, Cunbo Fan, Bowen Guan, Qingli Song, Chengzhi Liu, and Shuang Wang. 2024. "Analysis of the Ranging Capability of a Space Debris Laser Ranging System Based on the Maximum Detection Distance Model" Remote Sensing 16, no. 4: 727. https://doi.org/10.3390/rs16040727
APA StyleZhang, M., Wen, G., Fan, C., Guan, B., Song, Q., Liu, C., & Wang, S. (2024). Analysis of the Ranging Capability of a Space Debris Laser Ranging System Based on the Maximum Detection Distance Model. Remote Sensing, 16(4), 727. https://doi.org/10.3390/rs16040727