
Multiobjective Evolutionary Superpixel Segmentation for PolSAR Image Classification

 , , ,
, , ,
Abstract
:1. Introduction
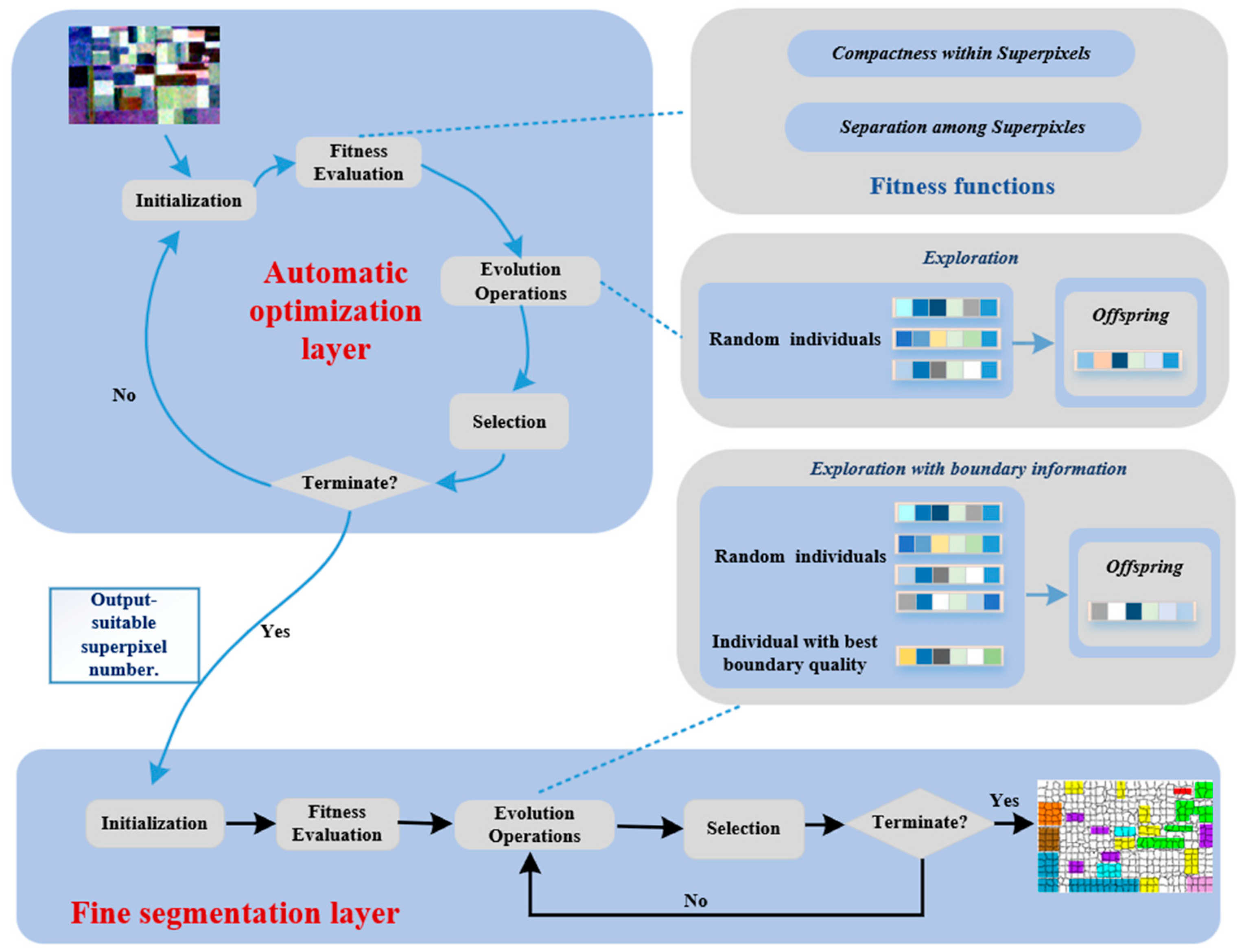
- The superpixel generation for PolSAR images is defined as a multiobjective optimization problem. the automatic optimization layer can optimize the similarity within the superpixels and the difference among the superpixels simultaneously. The suitable number of superpixels can be determined for the observed PolSAR image automatically.
- The fine segmentation layer can further improve the segmentation performance by fully using boundary information, where the boundary information of the good-quality superpixels is incorporated into the specific evolutionary operator to generate better superpixel segmentation results. It is helpful to search for the accurate boundaries of complex ground targets.
2. Related Works
2.1. Superpixel Segmentation for PolSAR Images
2.2. Multiobjective Evolutionary Algorithm
3. Methodology
3.1. Overall Framework
3.2. Automatic Optimization Layer
3.2.1. Fitness Functions
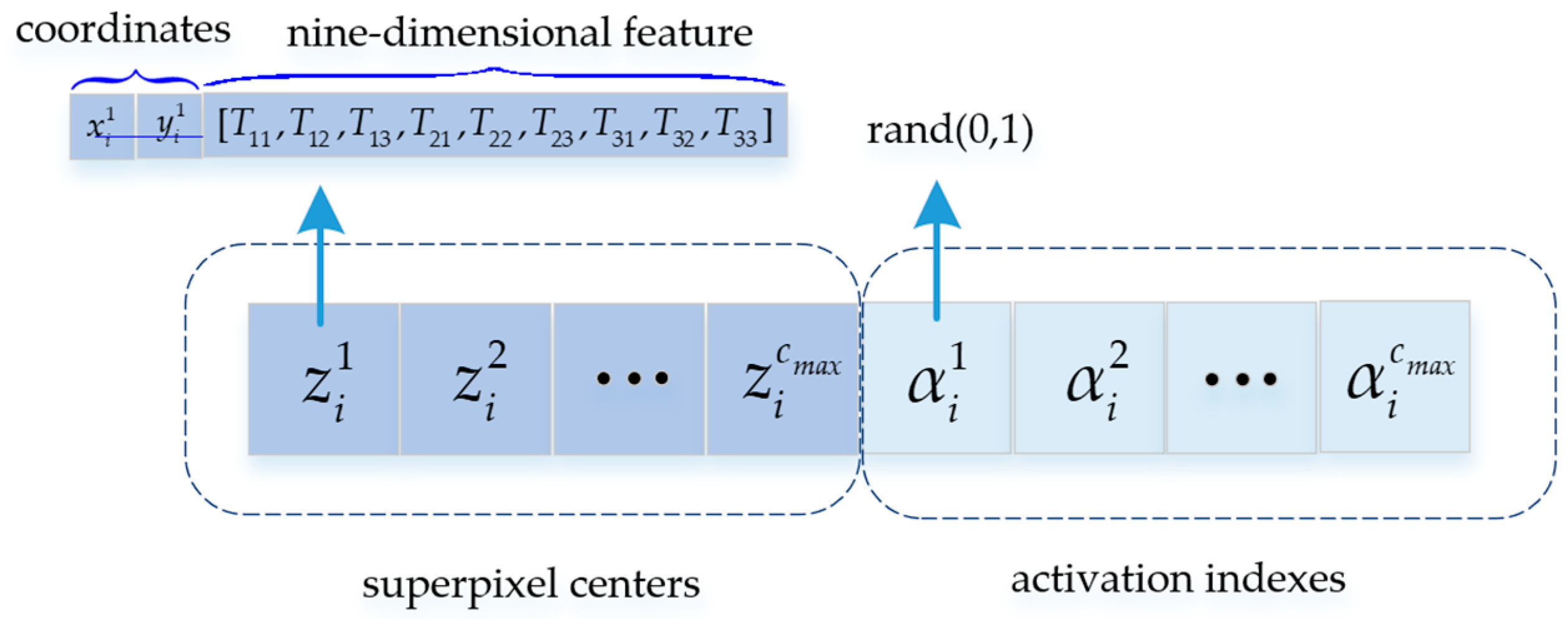
3.2.2. Encoding and Initialization
- (1)
- Individual encoding
- (2)
- Population initialization
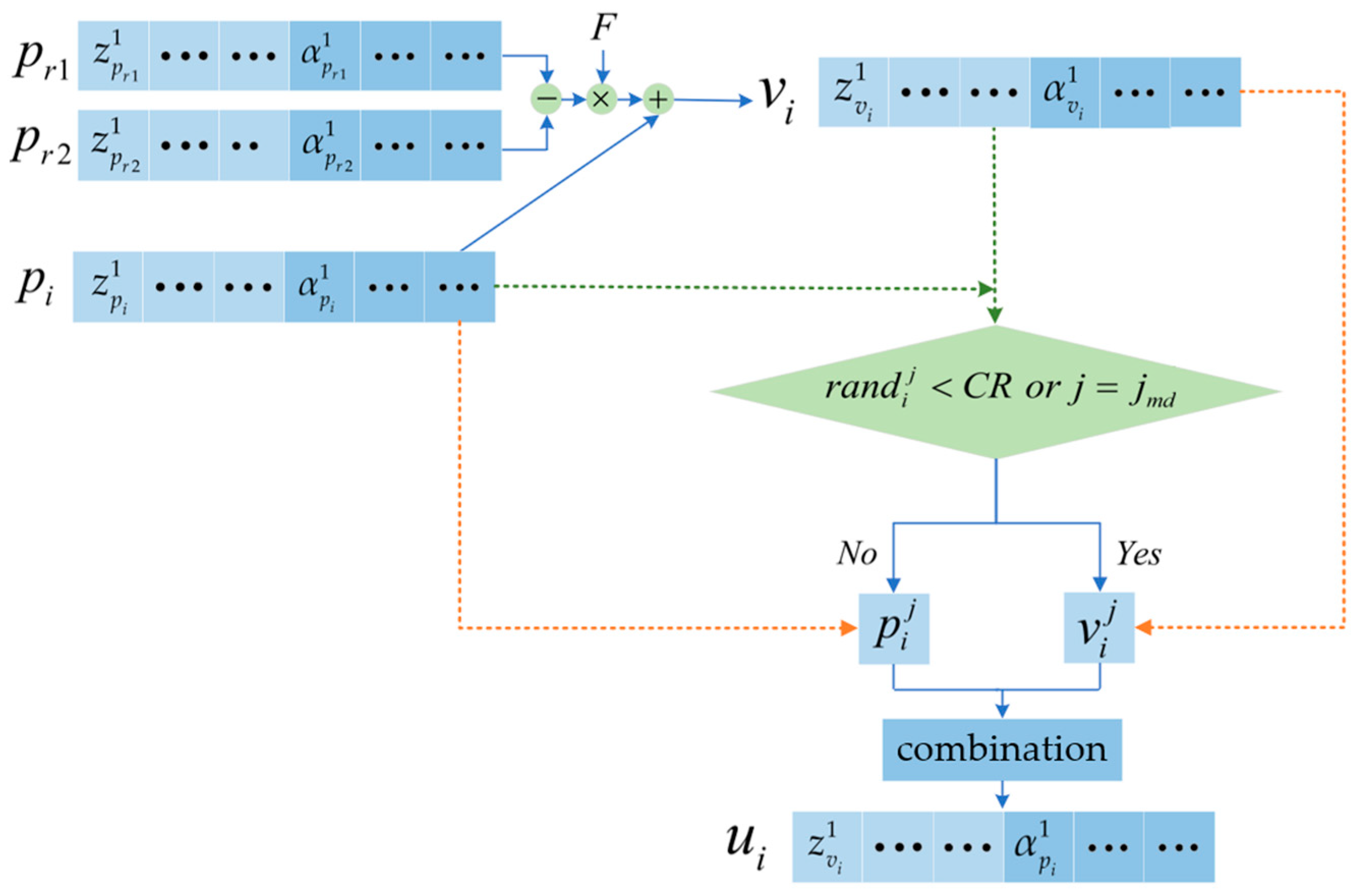
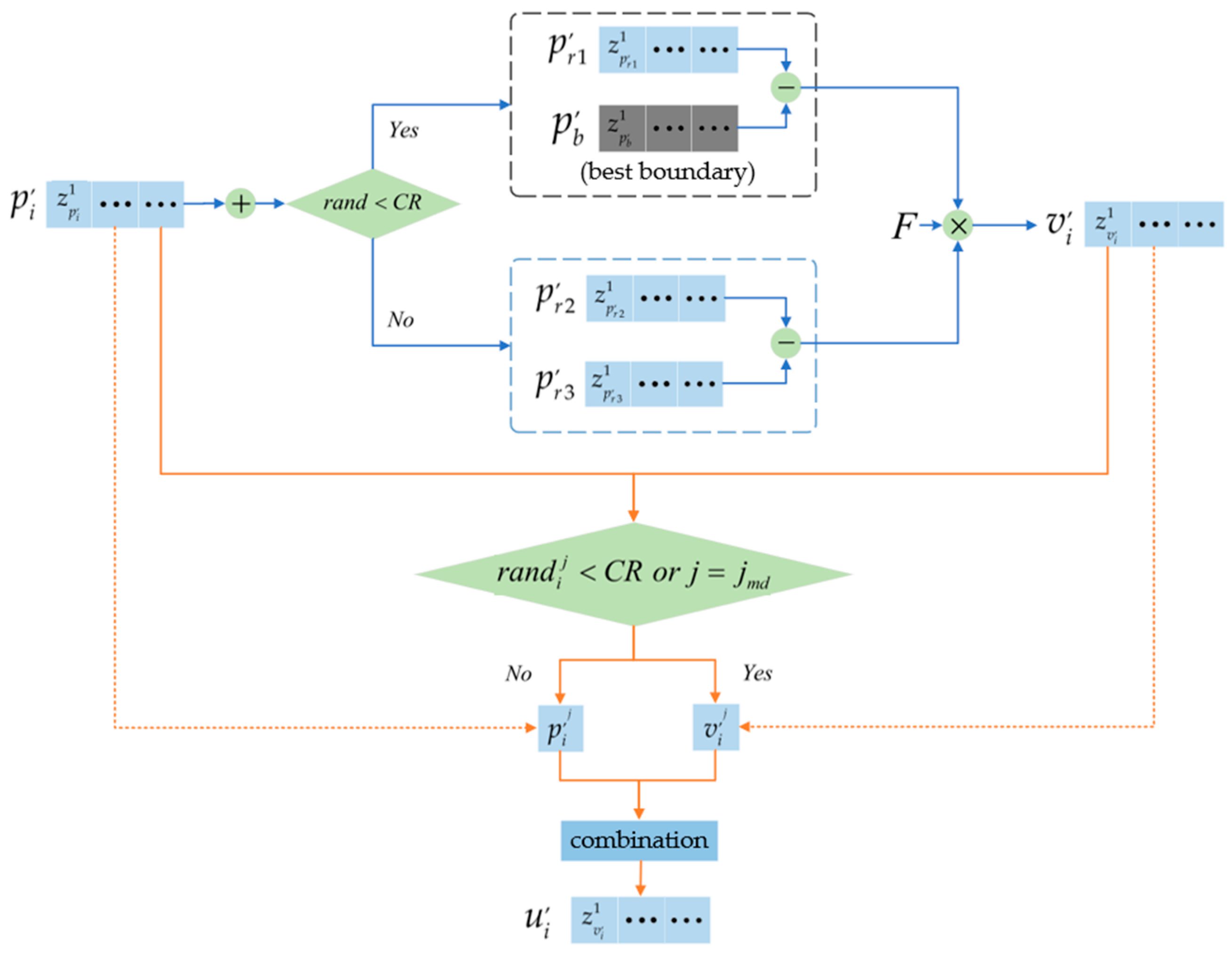
3.2.3. Evolutionary Operators
- (1)
- Differential evolution strategy
- (2)
- Individual selection and stop criteria
3.3. Fine Segmentation Layer
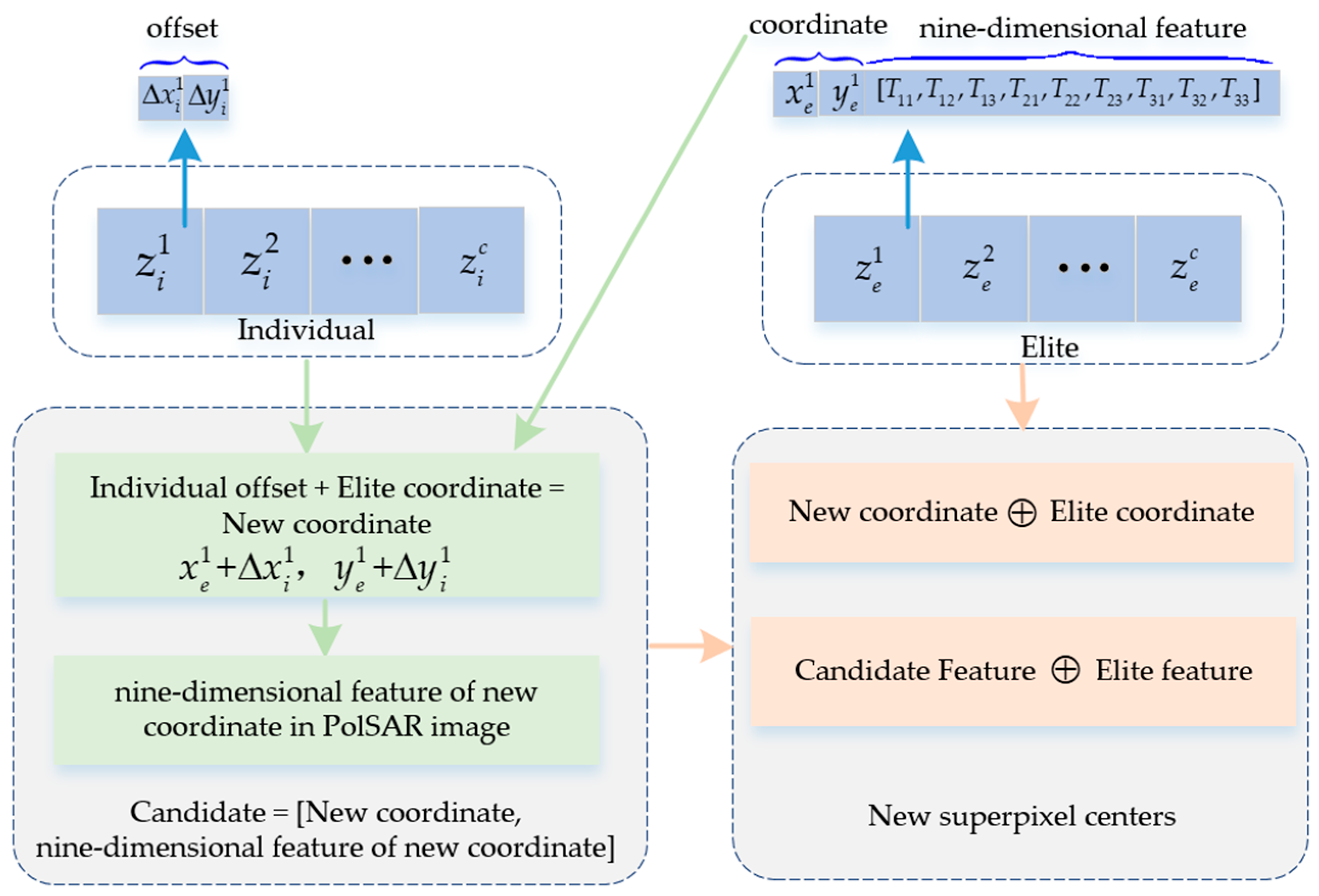
3.3.1. Encoding for Fine-Tuning
- (1)
- Individual encoding of fine segmentation layer
- (2)
- Population initialization of fine segmentation layer
3.3.2. Evolutionary Operators of Fine Segmentation Layer
- (1)
- Evolutionary operators with boundary information
- (2)
- Individual selection and final output
3.4. Complexity Analysis
4. Experiments Study
4.1. Experiment Settings
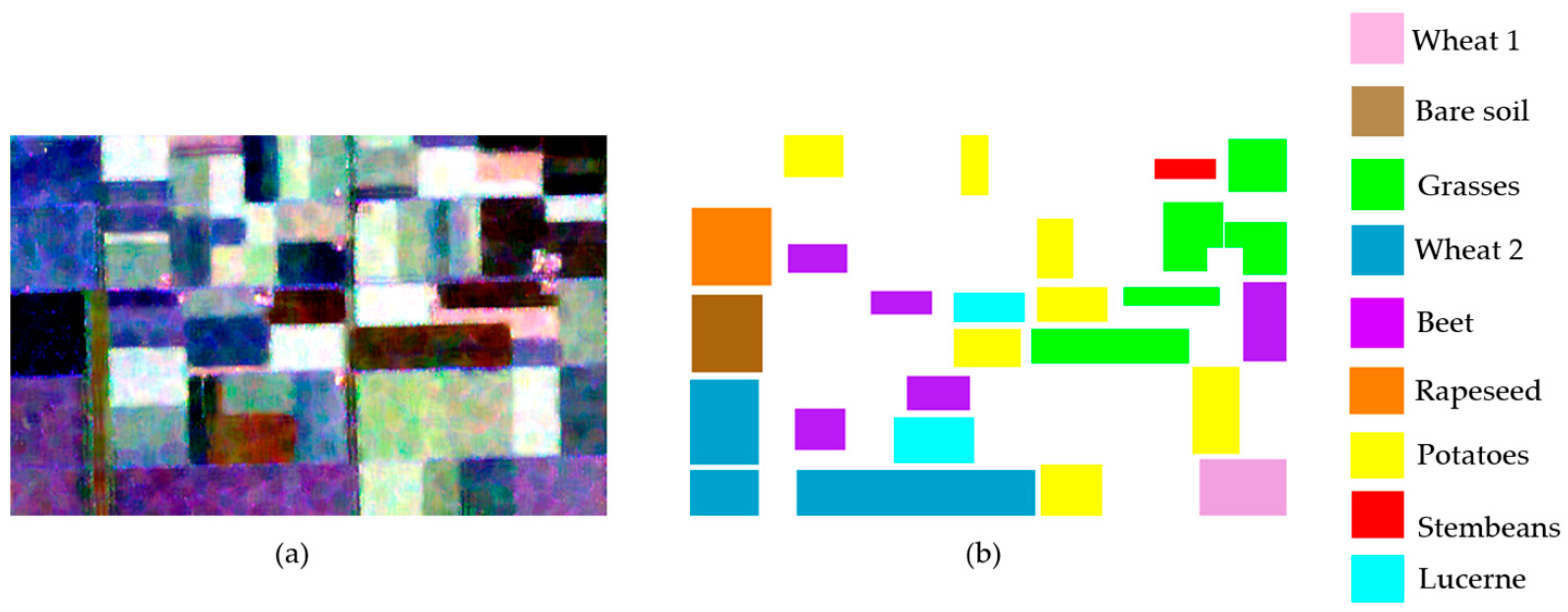
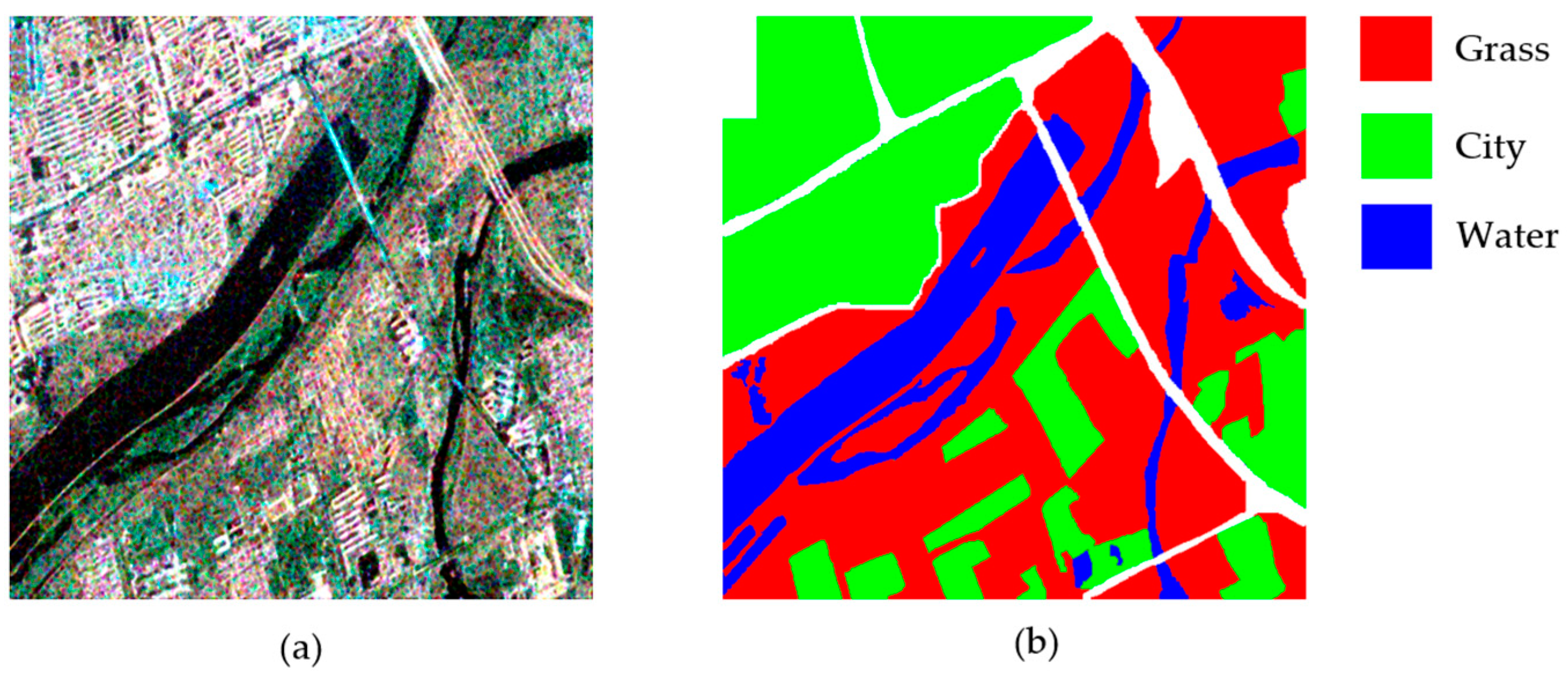
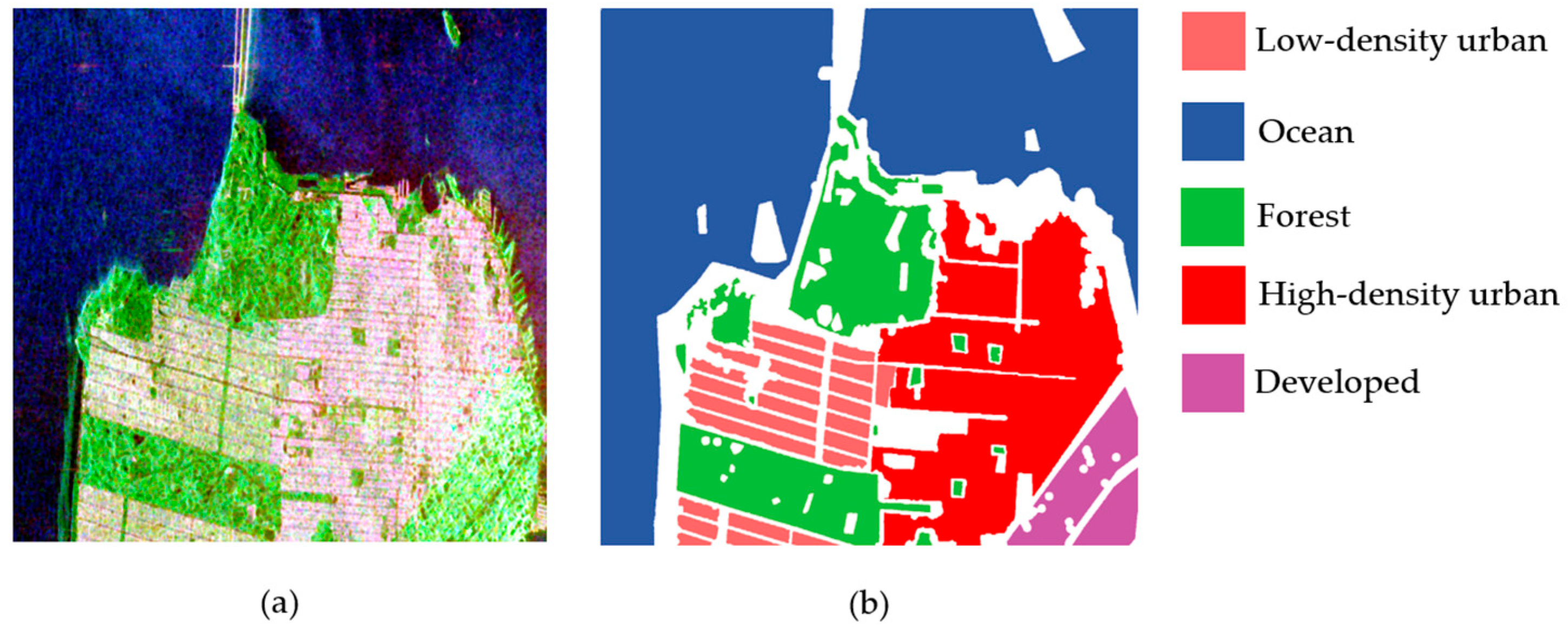
4.1.1. PolSAR Datasets
4.1.2. Metrics
4.2. Studies on MOES
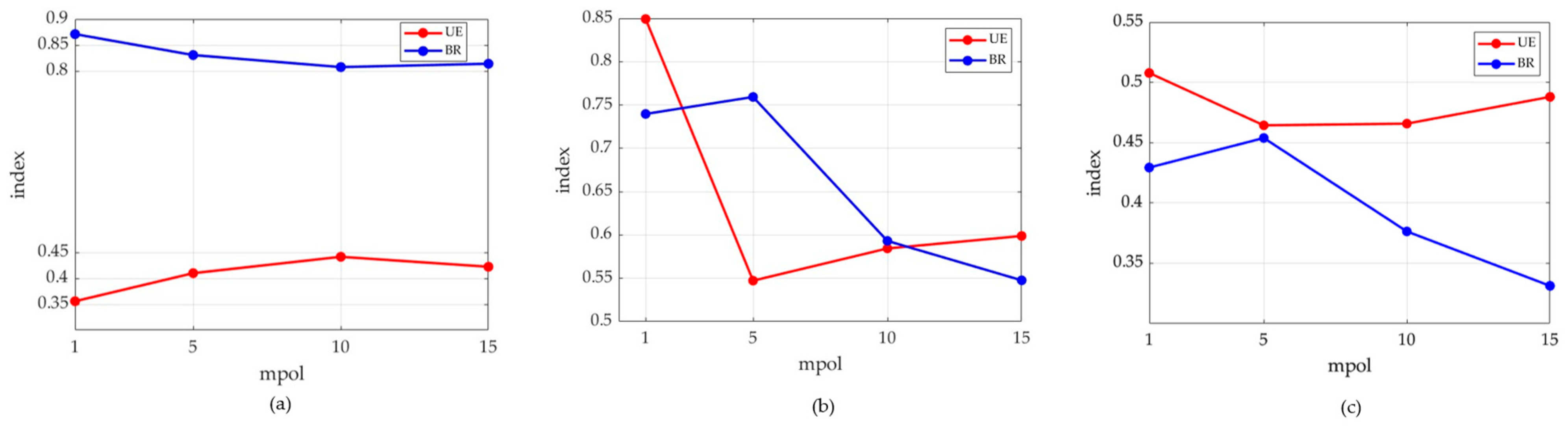
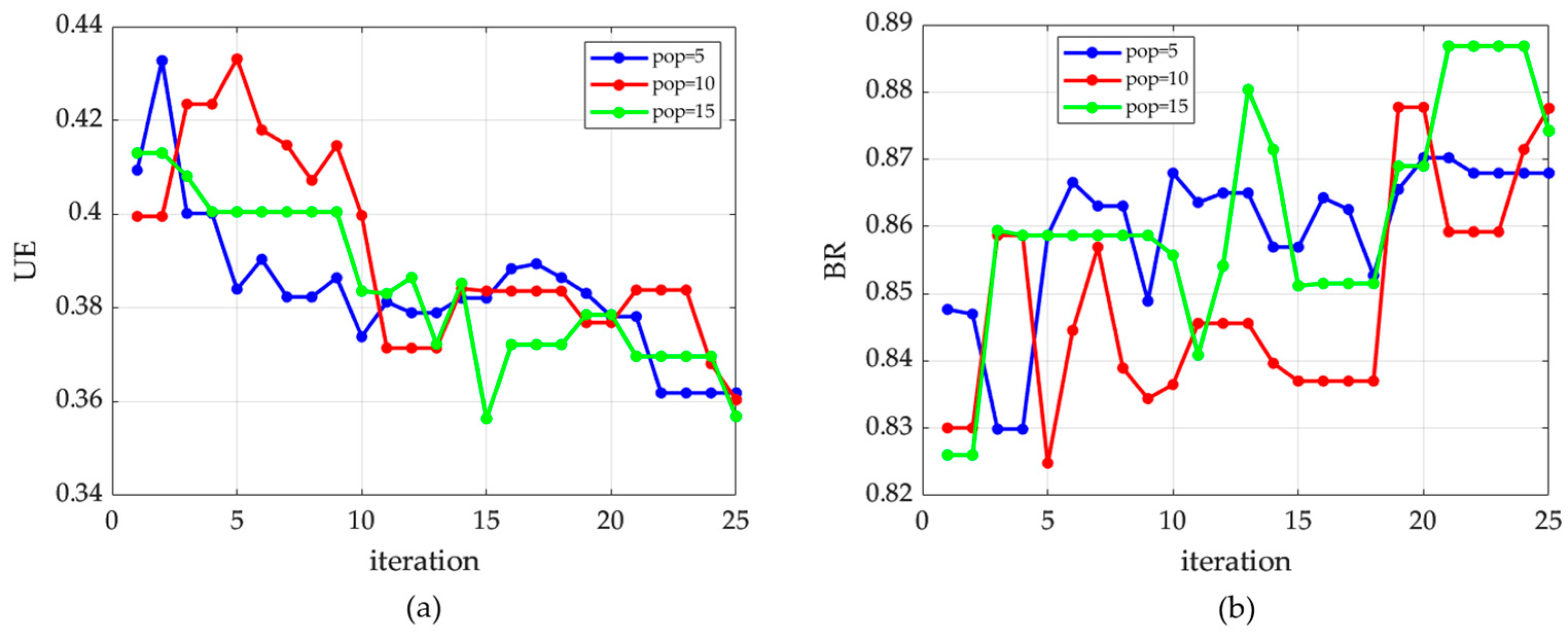
4.2.1. Parameter Settings
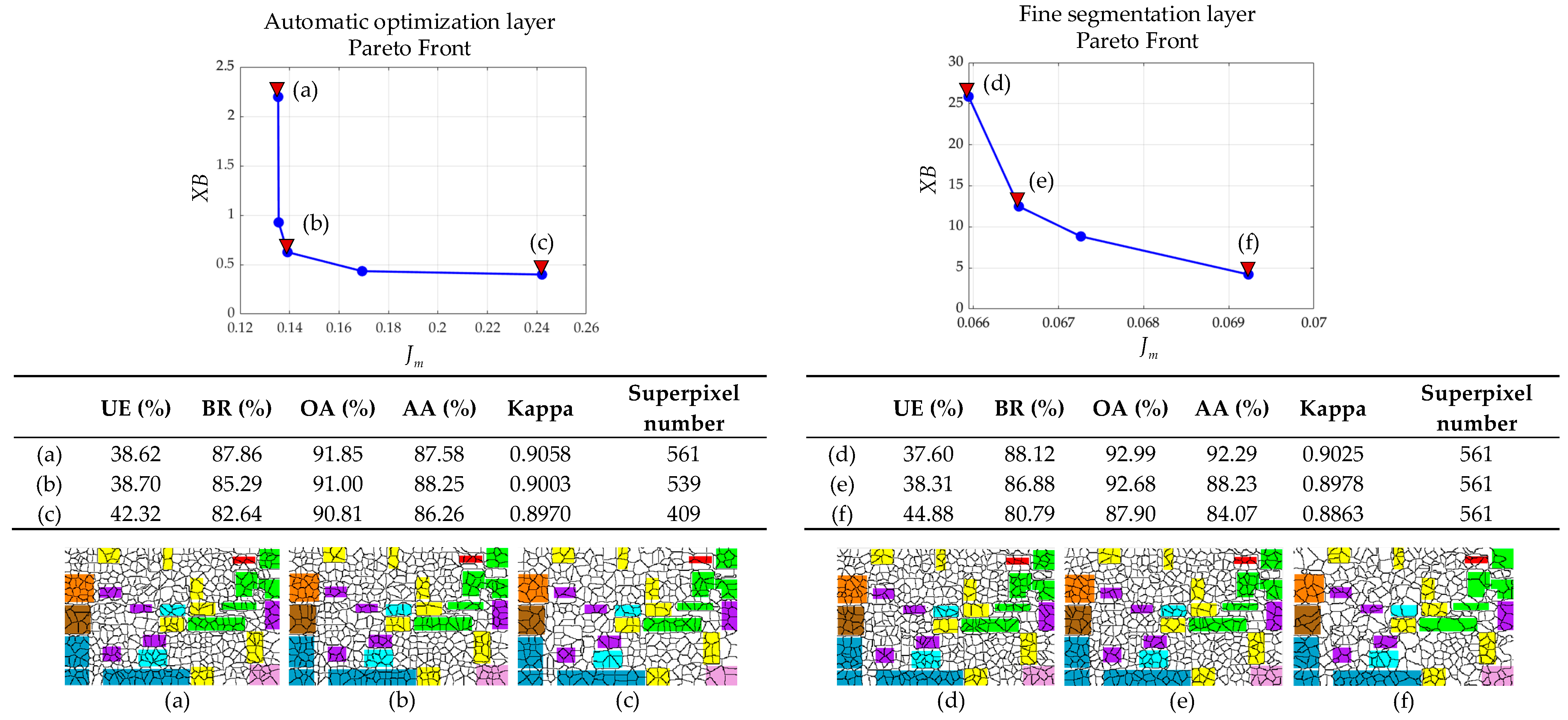
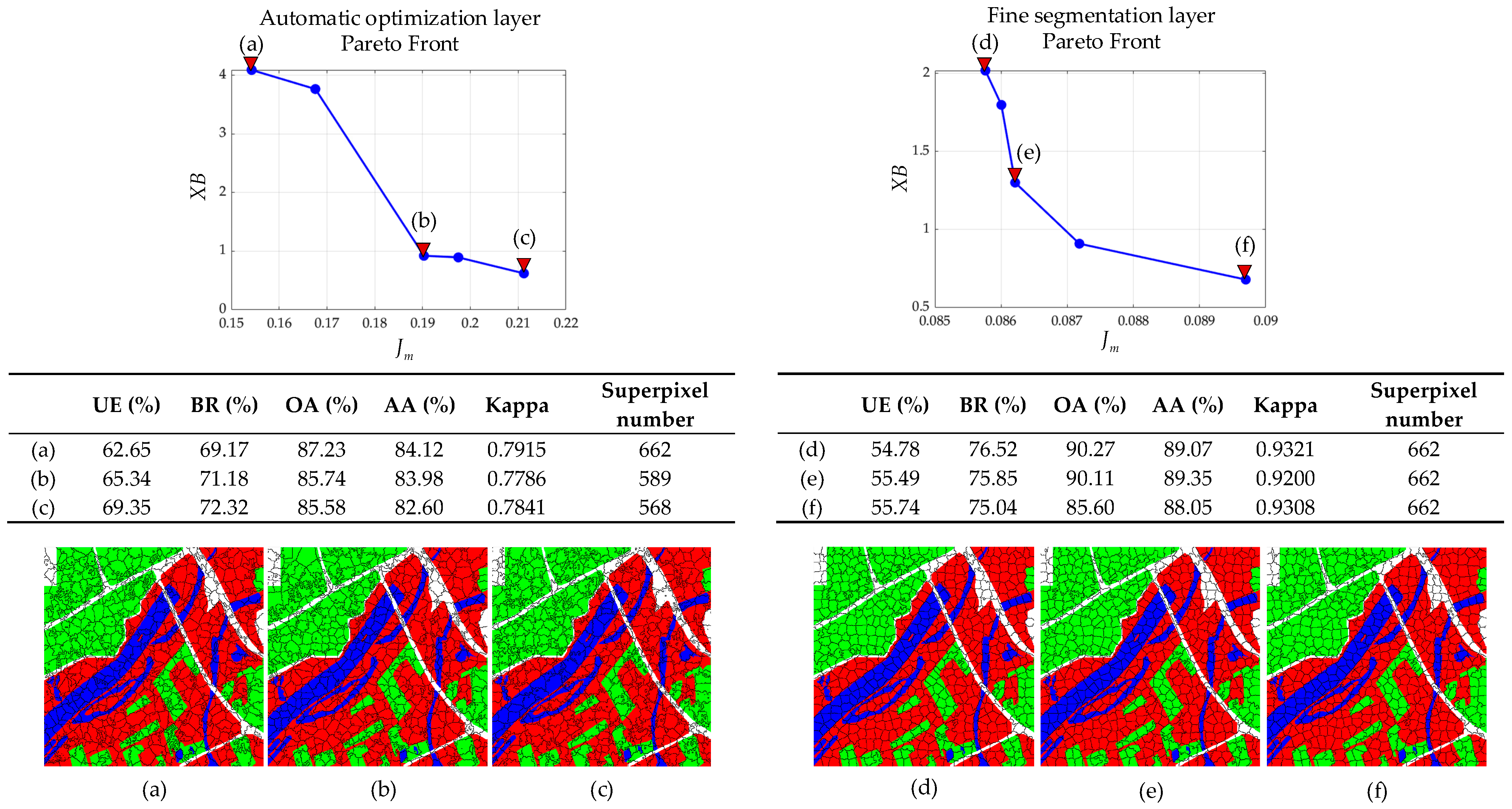
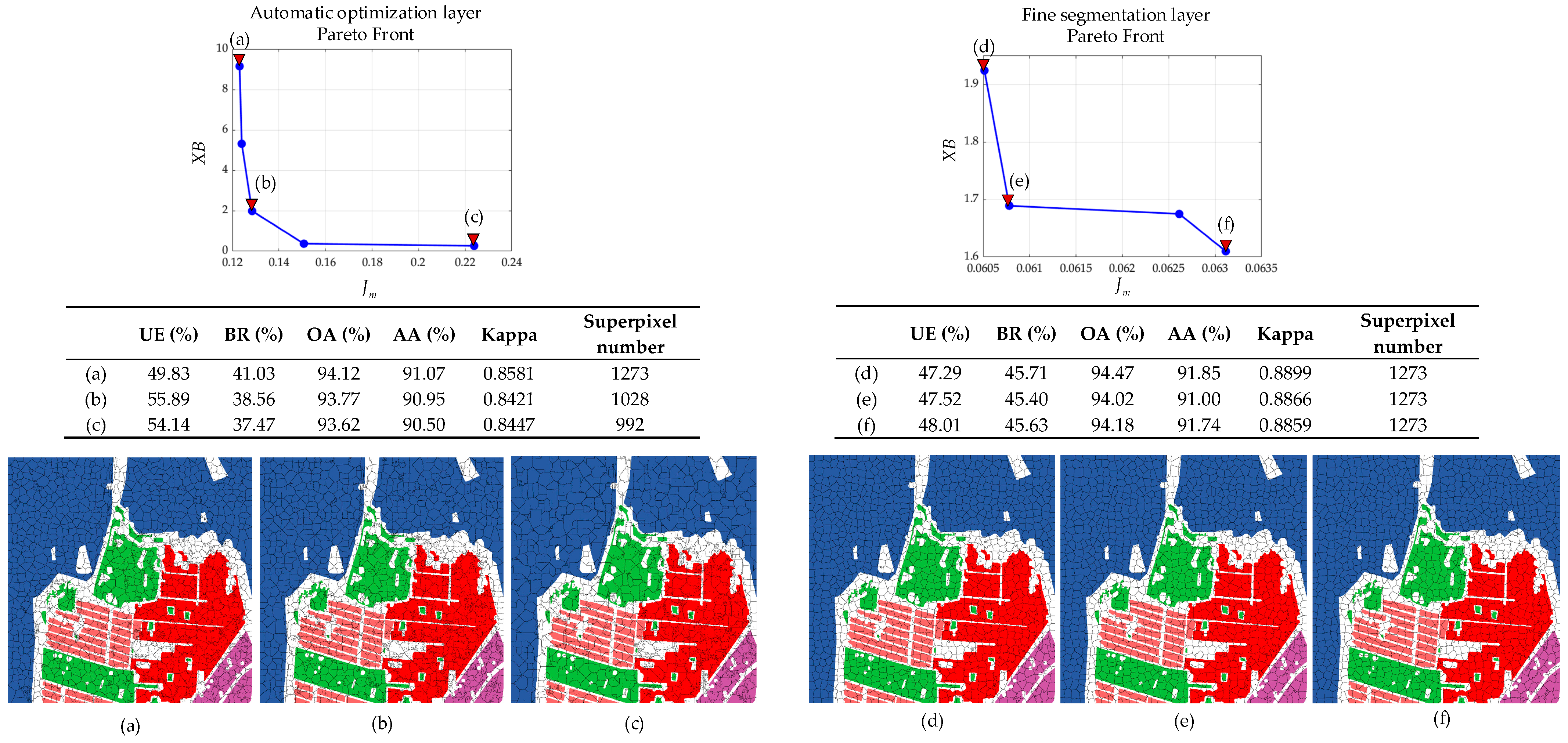
4.2.2. PFs of MOES
4.2.3. Number of Superpixels in MOES
4.3. Comparison Experiments on PolSAR Datasets
4.3.1. Comparison Results in Flevoland Dataset
4.3.2. Comparison Results in Wei River in Xi’an Dataset
4.3.3. Comparison Results in San Francisco Dataset
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ren, S.; Zhou, F. Semi-Supervised Classification for PolSAR Data with Multi-Scale Evolving Weighted Graph Convolutional Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2911–2927. [Google Scholar] [CrossRef]
- Ganesan, P.G.; Rao, Y. The application of compact polarimetric decomposition algorithms to L-band PolSAR data in agricul-tural areas. Int. J. Remote Sens. 2018, 39, 8337–8360. [Google Scholar]
- Paek, S.W.; Balasubramanian, S.; Kim, S.; Weck, O. Small-Satellite Synthetic Aperture Radar for Continuous Global Biospheric Monitoring: A Review. Remote Sens. 2020, 12, 2546. [Google Scholar] [CrossRef]
- Tan, W.; Sun, B.; Xiao, C.; Huang, P.; Xu, W.; Yang, W. A Novel Unsupervised Classification Method for Sandy Land Using Fully Polarimetric SAR Data. Remote Sens. 2021, 13, 355. [Google Scholar] [CrossRef]
- Li, M.; Zou, H.; Dong, Z.; Wei, J.; Qin, X. Unsupervised classification of PolSAR image based on tensor product graph diffusion. In Proceedings of the 2021 CIE International Conference on Radar, Haikou, China, 15–19 December 2021; pp. 2505–2508. [Google Scholar]
- Liu, B.; Zhang, Z.; Liu, X.; Yu, W. Representation and Spatially Adaptive Segmentation for PolSAR Images Based on Wedgelet Analysis. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4797–4809. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, M.; Li, B.; He, Y. Intrinsic Manifold SLIC: A Simple and Efficient Method for Computing Content-Sensitive Su-perpixels. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 653–666. [Google Scholar] [CrossRef] [PubMed]
- Gong, Y.; Zhou, Y. Differential evolutionary superpixel segmentation. IEEE Trans. Image Process. 2018, 27, 1390–1404. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yu, C.; Yu, M.; He, Y. Manifold slic: A fast method to compute content-sensitive superpixels. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR, Las Vegas, NV, USA, 27–30 June 2016; pp. 651–659. [Google Scholar]
- Bergh, M.; Boix, X.; Gool, L. Seeds: Superpixels extracted via energy-driven sampling. In Proceedings of the 12th European Conference on Computer Vision, ECCV, Florence, Italy, 7–13 October 2012; pp. 298–314. [Google Scholar]
- Levinshtein, A.; Stere, A.; Kutulakos, K.N.; Fleet, D.J.; Dickinson, S.J.; Siddiqi, K. Turbopixels: Fast superpixels using geometric flows. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2290–2297. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Chen, J. Superpixel segmentation using linear spectral clustering. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, CVPR, Boston, MA, USA, 7–12 June 2015; pp. 1356–1363. [Google Scholar]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Vedaldi, A.; Soatto, S. Quick shift and kernel methods for mode seeking. In Proceedings of the 10th European Conference on Computer Vision (ECCV), Marseille, France, 12–18 October 2008; pp. 705–718. [Google Scholar]
- Weikersdorfer, D.; Gossow, D.; Beetz, M. Depth-adaptive superpixels. In Proceedings of the 21th International Conference on Pattern Recognition, ICPR, Tsukuba, Japan, 11–15 November 2012; pp. 2087–2090. [Google Scholar]
- Shi, J.; Malik, J. Normalized cuts and image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 888–905. [Google Scholar]
- Felzenszwalb, P.F.; Huttenlocher, D.P. Efficient graph-based image segmentation. Int. J. Comput. Vis. 2004, 59, 167–181. [Google Scholar] [CrossRef]
- Tang, D.; Fu, H.; Cao, X. Topology preserved regular superpixel. In Proceedings of the 2012 IEEE International Conference on Multimedia and Expo, Melbourne, VIC, Australian, 9–13 July 2012; pp. 765–768. [Google Scholar]
- Shen, j.; Du, Y.; Wang, W.; Li, X. Lazy random walks for superpixel segmentation. IEEE Trans. Image Process. 2014, 23, 1451–1462. [Google Scholar] [CrossRef] [PubMed]
- Qin, F.; Guo, J.; Lang, F. Superpixel Segmentation for Polarimetric SAR Imagery Using Local Iterative Clustering. IEEE Geosci. Remote Sens. Lett. 2015, 12, 13–17. [Google Scholar]
- Ersahin, K.; Cumming, I.G.; Ward, R.K. Segmentation and Classification of Polarimetric SAR Data Using Spectral Graph Partitioning. IEEE Trans. Geosci. Remote Sens. 2010, 48, 164–174. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Wang, W.; Su, Y. Adaptive Superpixel Generation for Polarimetric SAR Images with Local Iterative Clus-tering and SIRV Model. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3115–3131. [Google Scholar] [CrossRef]
- Yang, S.; Yaun, X. Superpixel generation for polarimetric SAR using hierarchical energy maximization. Comput. Geosci. 2020, 135, 104395. [Google Scholar] [CrossRef]
- Lang, F.; Yang, J.; Yan, S.; Qin, F. Superpixel segmentation of polarimetric synthetic aperture radar (sar) images based on generalized mean shift. Remote Sens. 2018, 10, 1592. [Google Scholar] [CrossRef]
- Liu, B.; Hu, H.; Wang, H. Superpixel-based classification with an adaptive number of classes for polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 2012, 51, 907–924. [Google Scholar] [CrossRef]
- Wang, W.; Xiang, D.; Ban, Y. Superpixel segmentation of polarimetric SAR images based on integrated distance measure and entropy rate method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4045–4058. [Google Scholar] [CrossRef]
- Liu, H.; Yang, S.; Gou, S. Fast classification for large polarimetric SAR data based on refined spatial-anchor graph. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1589–1593. [Google Scholar] [CrossRef]
- Hou, B.; Yang, C.; Ren, B.; Jiao, L. Decomposition-Feature-Iterative-Clustering-Based Superpixel Segmentation for PolSAR Image Classification. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1239–1243. [Google Scholar] [CrossRef]
- Li, M.; Zou, H.; Qin, X.; Dong, Z.; Wei, J. Superpixel Segmentation for PolSAR Images Based on Cross Iteration. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Brussels, Belgium, 11–16 July 2021; pp. 4739–4742. [Google Scholar]
- Guo, Y.; Jiao, L.; Qu, R.; Sun, Z.; Wang, S. Adaptive Fuzzy Learning Superpixel Representation for PolSAR Image Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5217818. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Q.; Zhou, A.; Gong, M.; Jiao, L. Adaptive Replacement Strategies for MOEA/D. IEEE Trans. Cybern. 2016, 46, 474–486. [Google Scholar] [CrossRef]
- Wang, Q.; Guidolin, M.; Savic, D.; Kapelan, Z. Two-Objective Design of Benchmark Problems of a Water Distribution System via MOEAs: Towards the Best-Known Approximation of the True Pareto Front. J. Water Resour. Plan. Manag. 2014, 141, 04014060. [Google Scholar] [CrossRef]
- Nada, M.A. Evolutionary Algorithm Definition. Am. J. Eng. Appl. Sci. 2009, 2, 789–795. [Google Scholar]
- Wang, J.; Peng, H.; Shi, P. An optimal image watermarking approach based on a multiobjective genetic algorithm. Inf. Sci. 2011, 181, 5501–5514. [Google Scholar] [CrossRef]
- Sen, S.; Tang, G.; Nehorai, A. Multiobjective Optimization of OFDM Radar Waveform for Target Detection. IEEE Trans. Signal Process. 2011, 59, 639–652. [Google Scholar] [CrossRef]
- Wagner, T.; Beume, N.; Naujoks, B. Pareto-, aggregation-, and indicator-based methods in many-objective optimization. In Proceedings of the 4th International Conference on Evolutionary Multi-Criterion Optimization (EMO), Matsushima, Japan, 5–8 March 2007; pp. 742–756. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Ishibuchi, H.; Sakane, Y.; Tsukamoto, N.; Nojima, Y. Simultaneous use of different scalarizing functions in MOEA/D. In Proceedings of the 12th annual Conference on Genetic and Evolutionary Computation, Portland, OR, USA, 7–11 July 2010; pp. 519–526. [Google Scholar]
- Zhang, Q.; Li, H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Naujoks, B.; Beume, N.; Emmerich, M. Multiobjective optimisation using S-metric selection: Application to three-dimensional solution spaces. In Proceedings of the 2005 IEEE Congress on Evolutionary Computation, Edinburgh, UK, 2–5 September 2005; pp. 1282–1289. [Google Scholar]
- Zhang, M.; Jiao, L.; Ma, W.; Ma, J.; Gong, M. Multiobjective evolutionary fuzzy clustering for image segmentation with MOEA/D. Appl. Soft Comput. 2016, 48, 621–637. [Google Scholar] [CrossRef]
- Zhang, M.; Jiao, L.; Shang, R.; Zhang, X.; Li, L. Unsupervised EA-Based Fuzzy Clustering for Image Segmentation. IEEE Access 2020, 8, 8627–8647. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, S.; Zhang, L. Automatic Fuzzy Clustering Based on Adaptive Multiobjective Differential Evolution for Remote Sensing Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2290–2301. [Google Scholar] [CrossRef]
- Hinojosa, S.; Oliva, D.; Pajares, G. Reducing overlapped pixels: A multiobjective color thresholding approach. Soft Comput. 2020, 24, 6787–6807. [Google Scholar] [CrossRef]
- Sağ, T.; Çunkaş, M. Color image segmentation based on multiobjective artificial bee colony optimization. Appl. Soft Comput. 2015, 34, 389–401. [Google Scholar] [CrossRef]
- Ren, B.; Hou, B.; Zhao, J.; Jiao, L. Sparse Subspace Clustering-Based Feature Extraction for PolSAR Imagery Classification. Remote Sens. 2018, 10, 391. [Google Scholar] [CrossRef]
- Chen, Y.; Jiao, L.; Li, Y.; Zhao, J. Multilayer projective dictionary pair learning and sparse autoencoder for PolSAR image classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6683–6694. [Google Scholar] [CrossRef]
- Guo, Y.; Jiao, L.; Wang, S.; Wang, S.; Liu, F.; Hua, W. Fuzzy superpixels for polarimetric SAR images classification. IEEE Trans. Fuzzy Syst. 2018, 26, 2846–2860. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Yin, J.; Wang, T.; Du, Y.; Liu, X.; Zhou, L.; Yang, J. SLIC Superpixel Segmentation for Polarimetric SAR Images. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5201317. [Google Scholar] [CrossRef]
- Li, M.; Zou, H.; Qin, X. Efficient Superpixel Generation for Polarimetric SAR Images with Cross-Iteration and Hexagonal Initialization. Remote Sens. 2022, 14, 2914. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Independent Run | Flevoland | Wei River in Xi’an | San Francisco |
|---|---|---|---|
| 1 | 533 | 642 | 1271 |
| 2 | 554 | 659 | 1253 |
| 3 | 544 | 620 | 1273 |
| 4 | 561 | 662 | 1217 |
| 5 | 562 | 668 | 1287 |
| SLIC | SEEDS | TP | QS | POL-HLT | HCI | MOES |
|---|---|---|---|---|---|---|
| Index | SLIC | SEEDS | TP | QS | POL-HLT | HCI | MOES |
|---|---|---|---|---|---|---|---|
| UE (%) | 39.26 | 40.88 | 36.85 | 42.83 | 37.86 | 37.02 | 36.72 ± 0.81 |
| BR (%) | 86.81 | 88.10 | 86.18 | 83.62 | 87.13 | 88.45 | 89.04 ± 0.99 |
| Index | SLIC | SEEDS | TP | QS | POL-HLT | HCI | MOES |
|---|---|---|---|---|---|---|---|
| OA (%) | 93.72 | 93.05 | 92.98 | 94.66 | 91.25 | 92.89 | 92.98 ± 0.57 |
| AA (%) | 90.87 | 91.14 | 91.95 | 89.05 | 92.09 | 93.13 | 92.49 ± 0.17 |
| Kappa | 0.9063 | 0.9015 | 0.9025 | 0.8831 | 0.8960 | 0.9069 | 0.9258 ± 0.03 |
| Index | SLIC | SEEDS | TP | QS | POL-HLT | HCI | MOES |
|---|---|---|---|---|---|---|---|
| UE (%) | 58.53 | 55.59 | 55.05 | 62.86 | 59.01 | 57.68 | 55.04 ± 0.87 |
| BR (%) | 74.94 | 66.37 | 64.46 | 75.68 | 64.19 | 73.57 | 76.95 ± 0.65 |
| Index | SLIC | SEEDS | TP | QS | POL-HLT | HCI | MOES |
|---|---|---|---|---|---|---|---|
| OA (%) | 89.75 | 88.85 | 89.99 | 89.71 | 88.02 | 89.03 | 90.30 ± 0.10 |
| AA (%) | 89.04 | 87.94 | 89.28 | 89.66 | 87.15 | 87.94 | 89.37 ± 0.21 |
| Kappa | 0.8311 | 0.8288 | 0.8309 | 0.8224 | 0.8096 | 0.8194 | 0.8941 ± 0.02 |
| Index | SLIC | SEEDS | TP | QS | POL-HLT | HCI | MOES |
|---|---|---|---|---|---|---|---|
| UE (%) | 47.10 | 49.28 | 47.74 | 51.91 | 48.19 | 47.22 | 47.74 ± 0.86 |
| BR (%) | 43.85 | 37.21 | 32.62 | 42.10 | 44.20 | 35.56 | 45.62 ± 0.92 |
| Index | SLIC | SEEDS | TP | QS | POL-HLT | HCI | MOES |
|---|---|---|---|---|---|---|---|
| OA (%) | 94.84 | 94.92 | 94.46 | 95.76 | 94.31 | 94.84 | 94.56 ± 0.07 |
| AA (%) | 92.62 | 92.72 | 92.03 | 94.02 | 91.64 | 92.21 | 91.91 ± 0.17 |
| Kappa | 0.8622 | 0.8680 | 0.8591 | 0.8548 | 0.8573 | 0.8598 | 0.8718 ± 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, B.; Zhang, M.; Ma, K.; Liu, L.; Wan, J.; Chen, J.; Chen, J.; Zeng, H. Multiobjective Evolutionary Superpixel Segmentation for PolSAR Image Classification. Remote Sens. 2024, 16, 854. https://doi.org/10.3390/rs16050854
Chu B, Zhang M, Ma K, Liu L, Wan J, Chen J, Chen J, Zeng H. Multiobjective Evolutionary Superpixel Segmentation for PolSAR Image Classification. Remote Sensing. 2024; 16(5):854. https://doi.org/10.3390/rs16050854
Chicago/Turabian StyleChu, Boce, Mengxuan Zhang, Kun Ma, Long Liu, Junwei Wan, Jinyong Chen, Jie Chen, and Hongcheng Zeng. 2024. "Multiobjective Evolutionary Superpixel Segmentation for PolSAR Image Classification" Remote Sensing 16, no. 5: 854. https://doi.org/10.3390/rs16050854
APA StyleChu, B., Zhang, M., Ma, K., Liu, L., Wan, J., Chen, J., Chen, J., & Zeng, H. (2024). Multiobjective Evolutionary Superpixel Segmentation for PolSAR Image Classification. Remote Sensing, 16(5), 854. https://doi.org/10.3390/rs16050854