
Characterizing the California Current System through Sea Surface Temperature and Salinity


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data
2.2. Analysis
2.2.1. Clustering
2.2.2. Classification of Remote Sensing Data
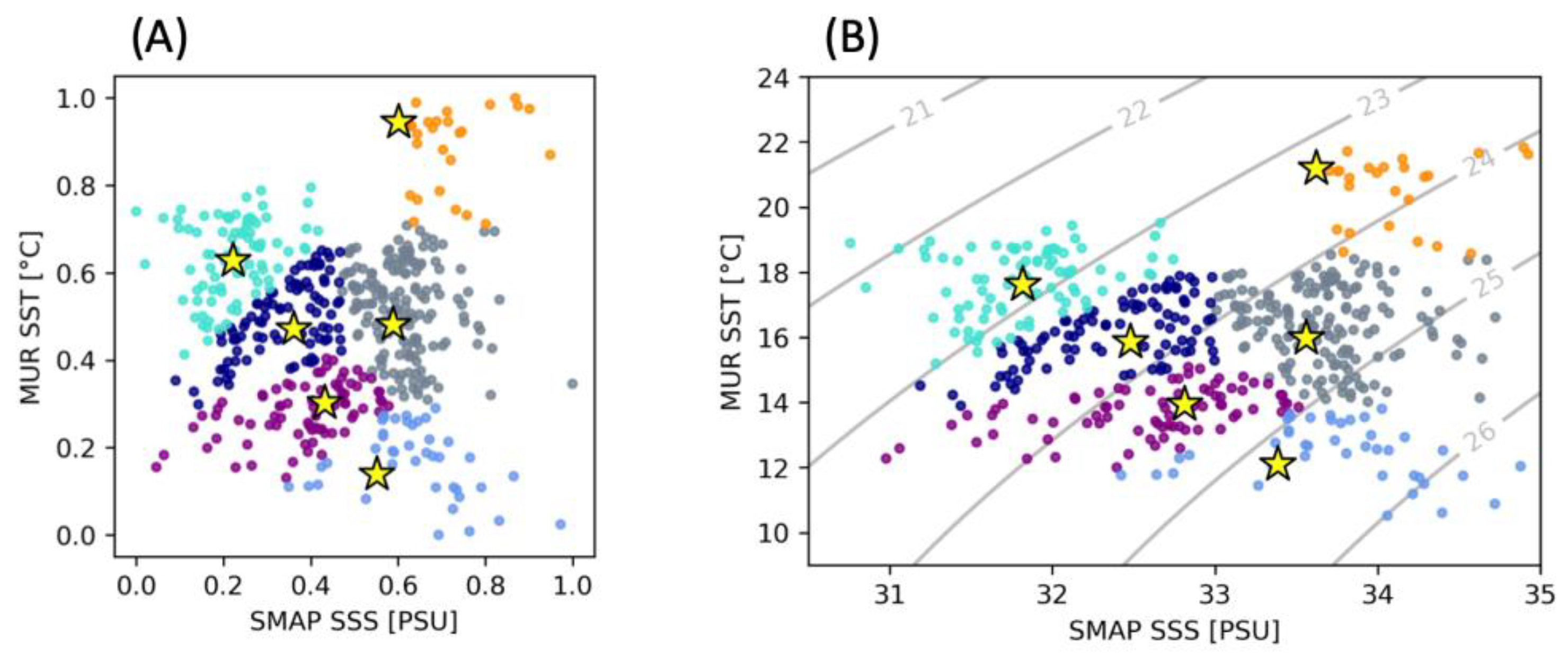
2.2.3. Uncertainty
3. Results
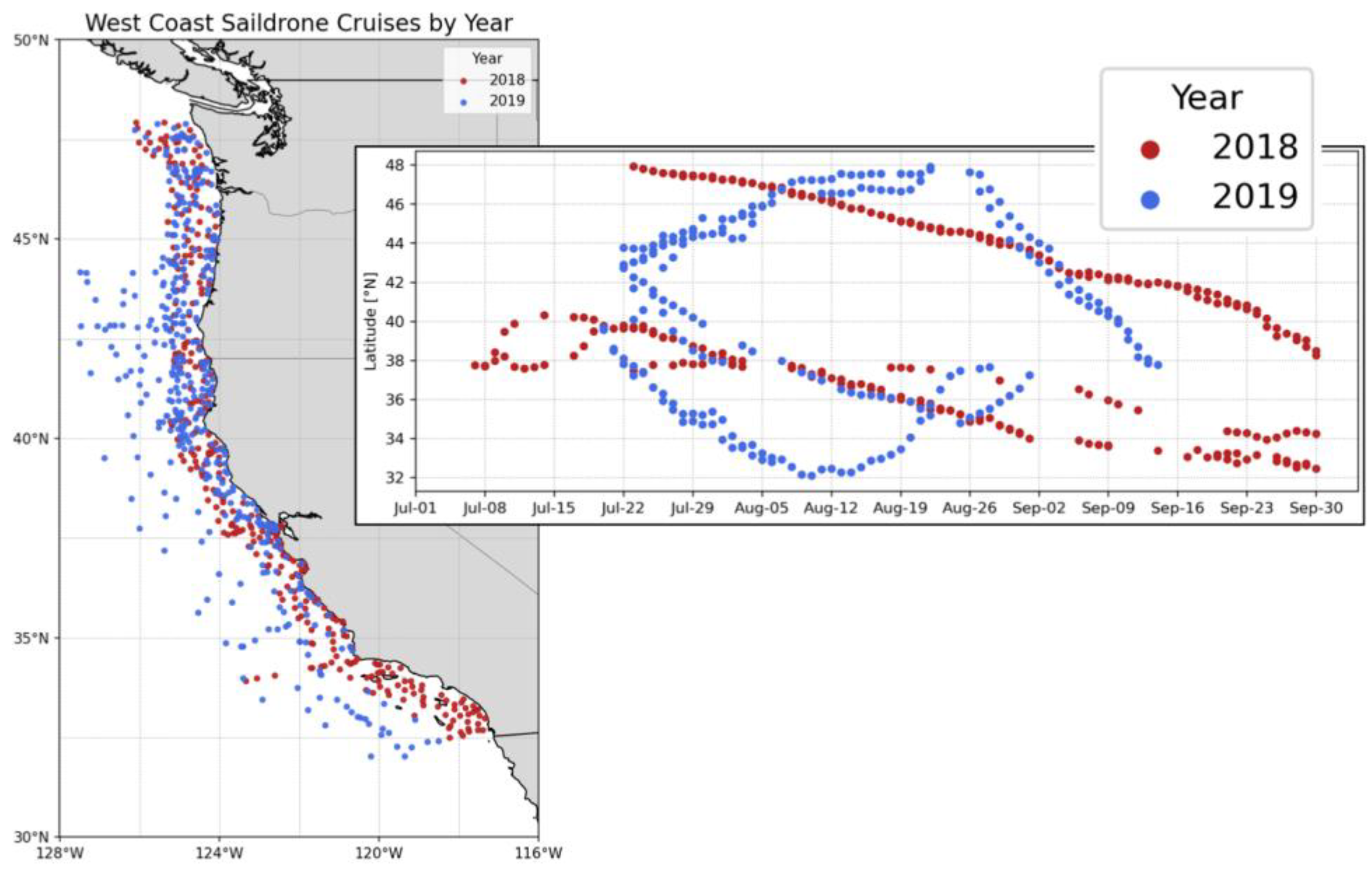
3.1. Saildrone In Situ Data
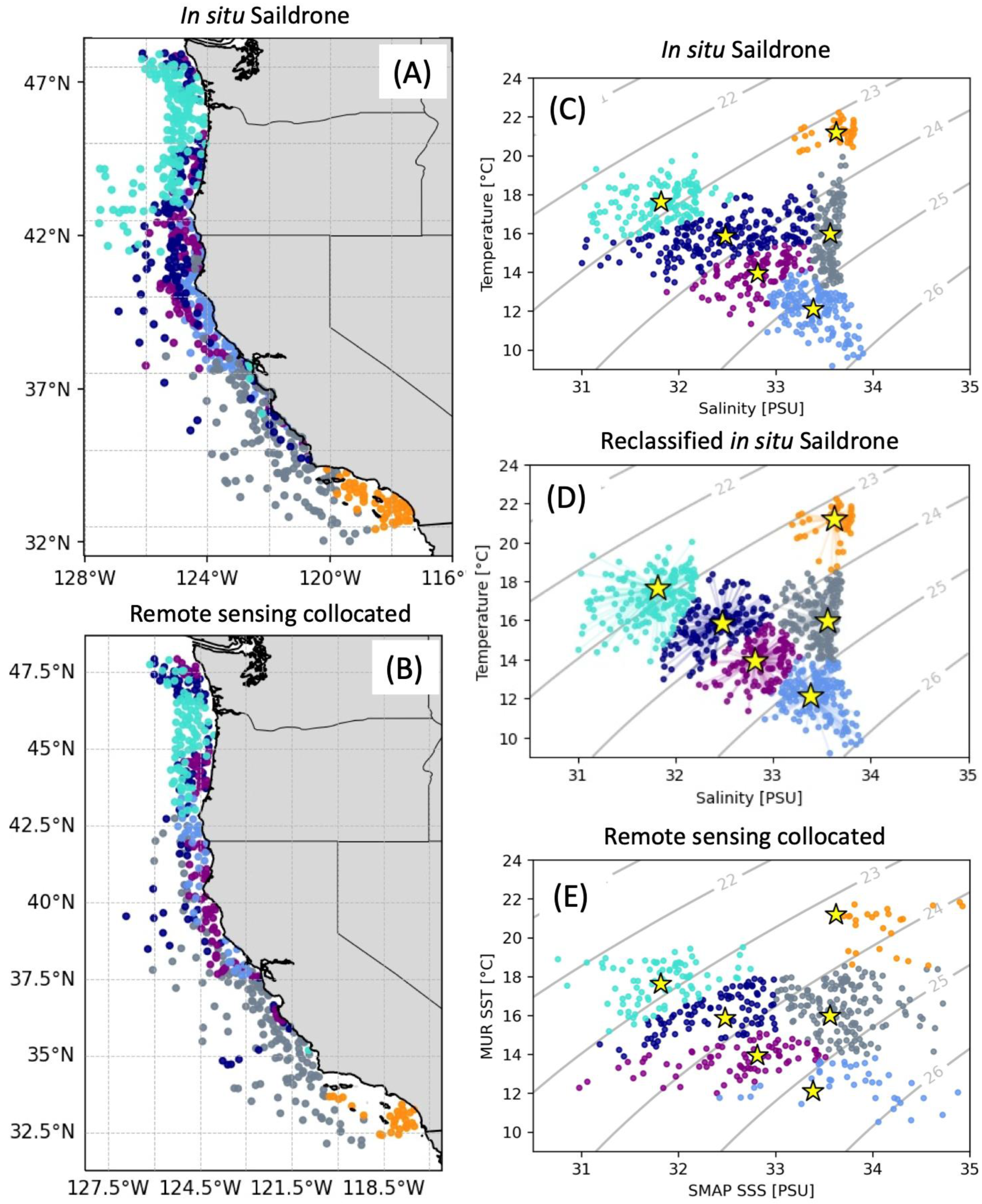
Clustering
3.2. Remote Sensing Collocated Data
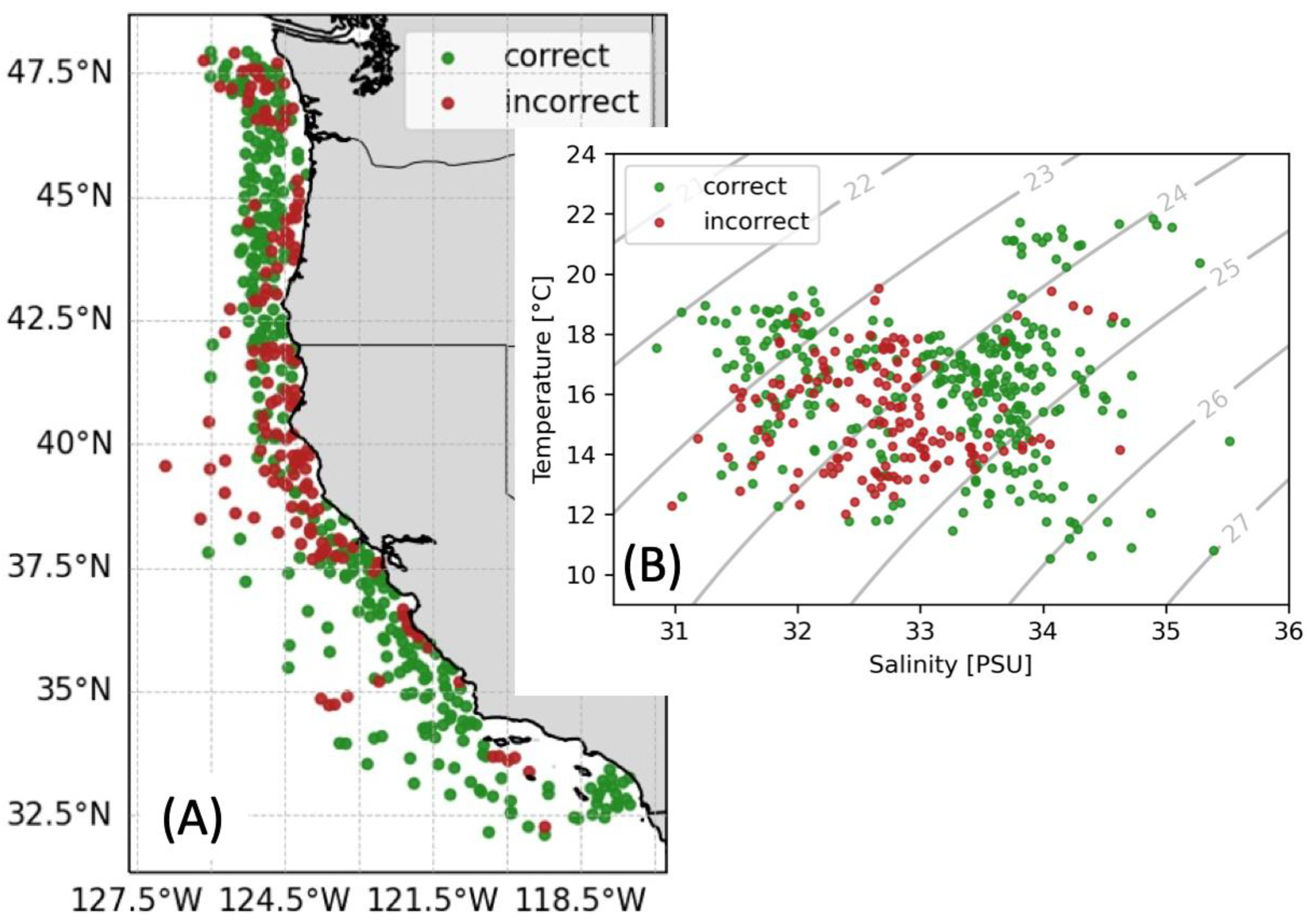
3.2.1. Classification and Description
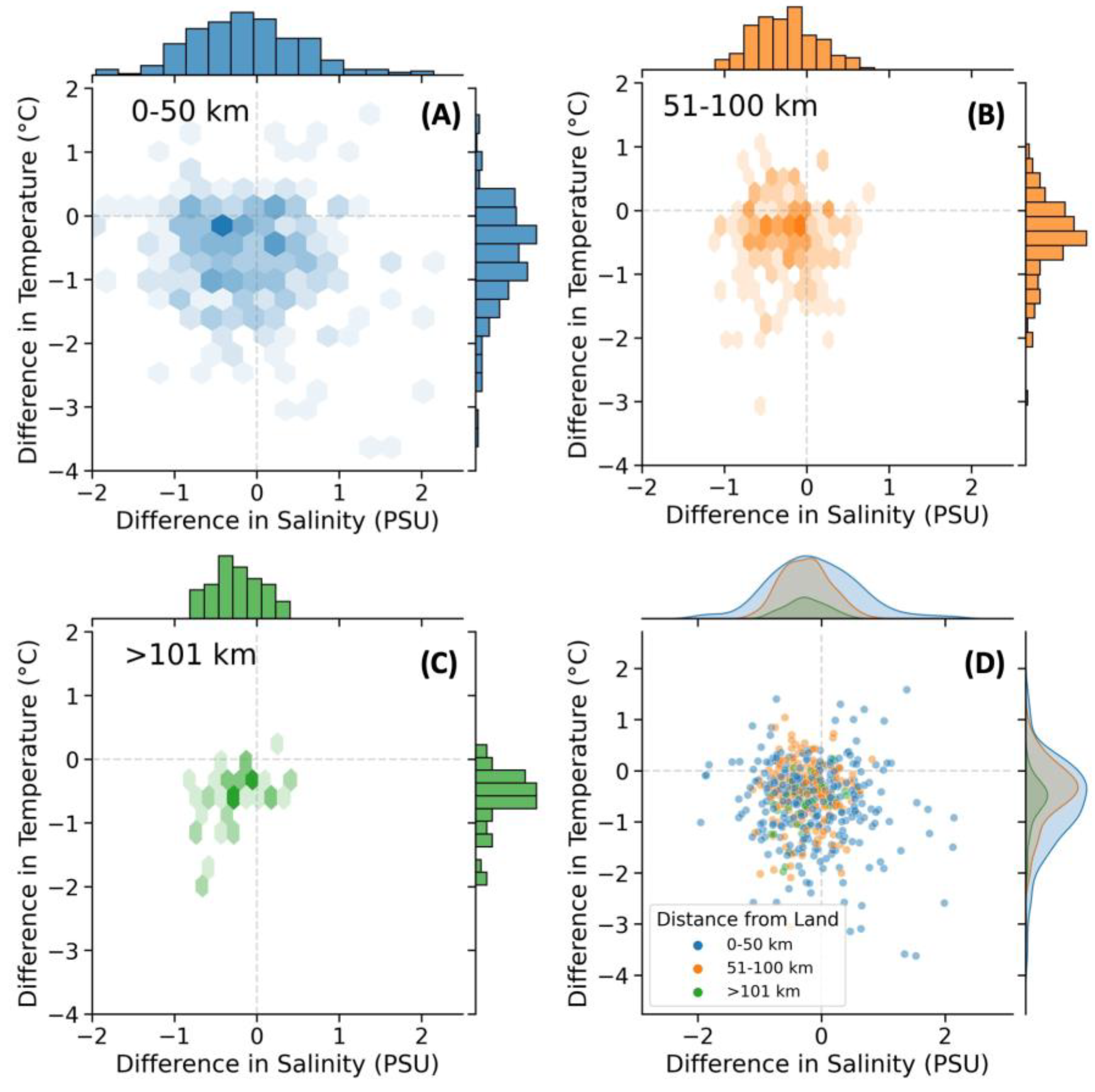
3.2.2. Uncertainty and Biases
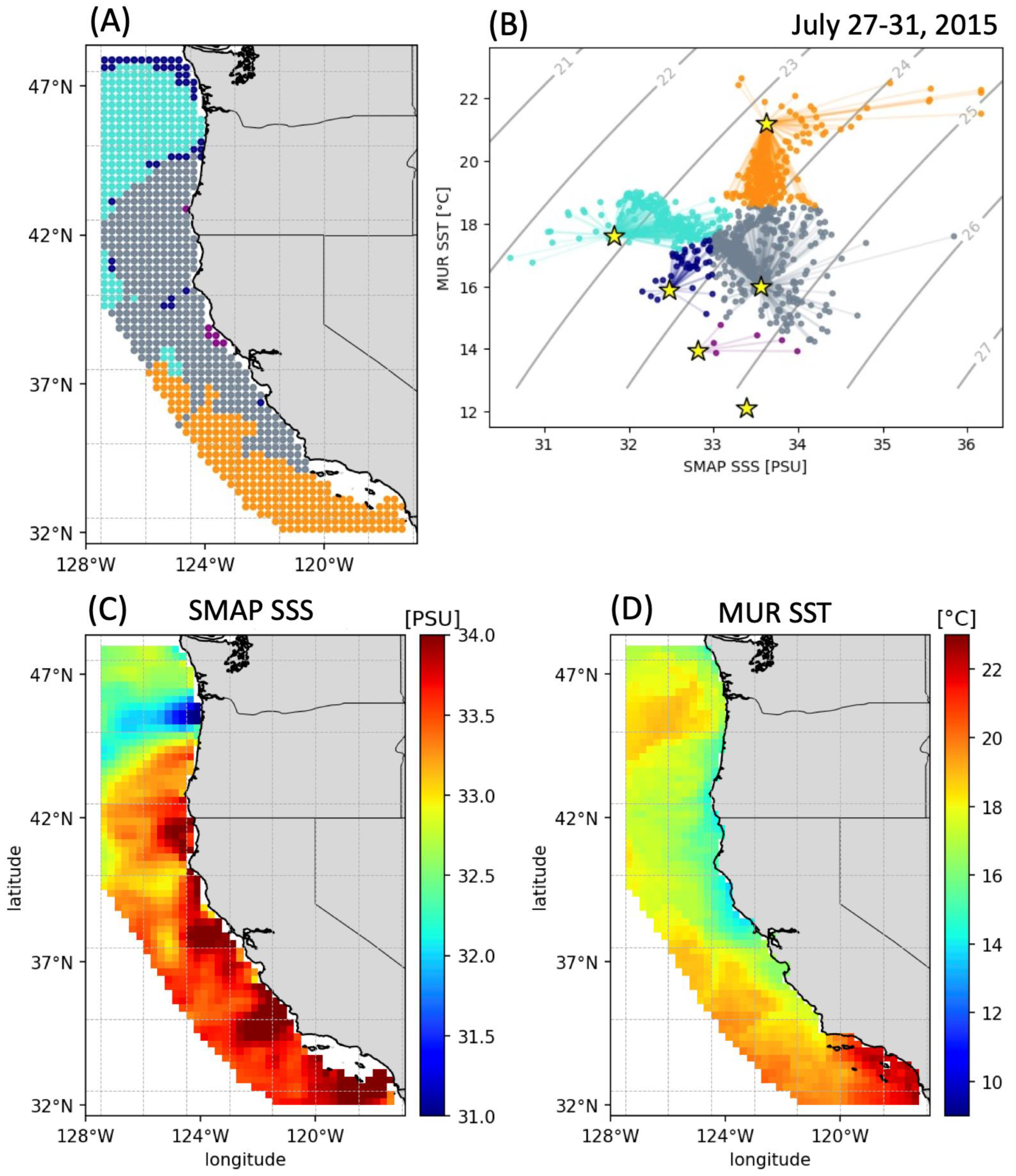
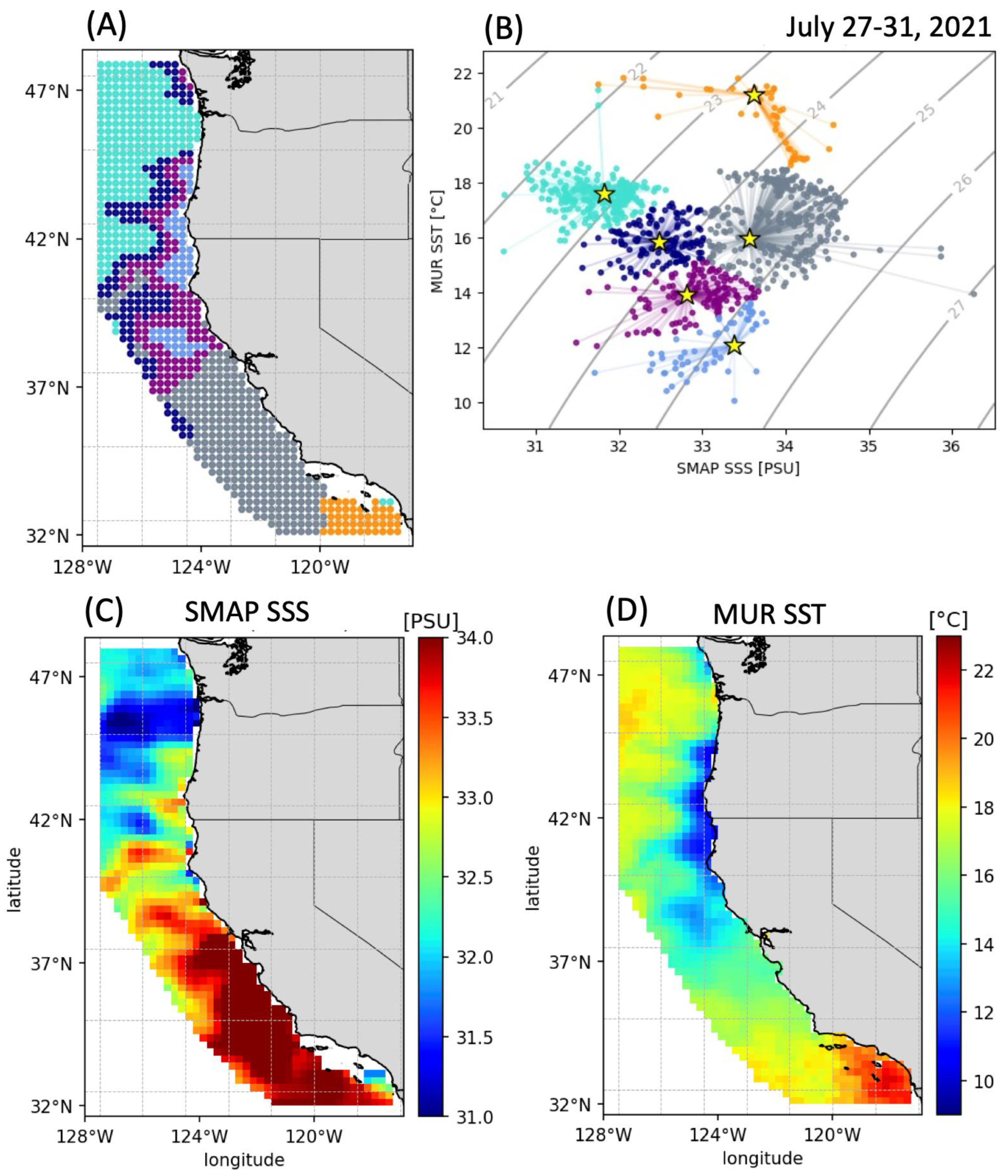
3.3. Remote Sensing Gridded Data
3.3.1. Summer Climatology
3.3.2. Variability in T-S Conditions
4. Discussion
4.1. Surface CCS Conditions Based on Saildrone In Situ Data
4.2. Surface CCS Conditions Based on Remote Sensing Data
4.3. Uncertainty
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Vinogradova, N.; Lee, T.; Boutin, J.; Drushka, K.; Fournier, S.; Sabia, R.; Stammer, D.; Bayler, E.; Reul, N.; Gordon, A.; et al. Satellite salinity observing system: Recent discoveries and the way forward. Front. Mar. Sci. 2019, 6, 428925. [Google Scholar] [CrossRef]
- Tomczak, M., Jr. A multi-parameter extension of temperature/salinity diagram techniques for the analysis of non-isopycnal mixing. Prog. Oceanogr. 1981, 10, 147–171. [Google Scholar] [CrossRef]
- Bograd, S.J.; Schroeder, I.D.; Jacox, M.G. A water mass history of the Southern California current system. Geophys. Res. Lett. 2019, 46, 6690–6698. [Google Scholar] [CrossRef]
- Huyer, A. Coastal upwelling in the California Current system. Prog. Oceanogr. 1983, 12, 259–284. [Google Scholar] [CrossRef]
- Minnett, P.; Alvera-Azcárate, A.; Chin, T.; Corlett, G.; Gentemann, C.; Karagali, I.; Li, X.; Marsouin, A.; Marullo, S.; Maturi, E.; et al. Half a century of satellite remote sensing of sea-surface temperature. Remote Sens. Environ. 2019, 233, 111366. [Google Scholar] [CrossRef]
- Chelton, D.B.; Esbensen, S.K.; Schlax, M.G.; Thum, N.; Freilich, M.H.; Wentz, F.J.; Gentemann, C.L.; Mcphaden, M.J.; Schopf, P.S. Observations of coupling between surface wind stress and sea surface temperature in the eastern Tropical Pacific. J. Clim. 2001, 14, 1479–1498. [Google Scholar] [CrossRef]
- Reul, N.; Tenerelli, J.; Chapron, B.; Vandemark, D.; Quilfen, Y.; Kerr, Y. SMOS satellite L-band radiometer: A new capability for ocean surface remote sensing in hurricanes. J. Geophys. Res. Ocean. 2012, 117, 7474. [Google Scholar] [CrossRef]
- Lagerloef, G.; deCharon, A.; Lindstrom, E. Ocean salinity and the Aquarius/SAC-D mission: A new frontier in ocean remote sensing. Mar. Technol. Soc. J. 2013, 47, 26–30. [Google Scholar] [CrossRef]
- Entekhabi, D.; Yueh, S.; O’neill, P.; Kellogg, K.; Allen, A.; Bindlish, R.; Brown, M.E.; Chan, S.; Colliander, A.; Crow, W.; et al. SMAP Handbook Soil Moisture Active Passive: Mapping Soil Moisture and Freeze/Thaw from Space; JPL CL14-2285; Jet Propulsion Laboratory: Pasadena, CA, USA, 2014. [Google Scholar]
- Tang, W.; Yueh, S.H.; Fore, A.G.; Vazquez-Cuervo, J.; Gentemann, C.; Hayashi, A.K.; Akins, A.; García-Reyes, M. Using Saildrones to Assess the SMAP Sea Surface Salinity Retrieval in the Coastal Regions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7042–7051. [Google Scholar] [CrossRef]
- Vazquez-Cuervo, J.; García-Reyes, M.; Gómez-Valdés, J. Identification of Sea Surface Temperature and Sea Surface Salinity Fronts along the California Coast: Application Using Saildrone and Satellite Derived Products. Remote Sens. 2023, 15, 484. [Google Scholar] [CrossRef]
- Sabia, R.; Ballabrera, J.; Lagerloef, G.; Bayler, E.; Talone, M.; Chao, Y.; Donlon, C.; Fernandez-Prieto, D.; Font, J. Derivation of an experimental satellite-based TS diagram. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5760–5763. [Google Scholar] [CrossRef]
- Sabia, R.; Klockmann, M.; Fernández-Prieto, D.; Donlon, C. A first estimation of SMOS-based ocean surface T-S diagrams. J. Geophys. Res. Ocean. 2014, 119, 7357–7371. [Google Scholar] [CrossRef]
- Checkley, D.M., Jr.; Barth, J.A. Patterns and processes in the California Current System. Prog. Oceanogr. 2009, 83, 49–64. [Google Scholar] [CrossRef]
- Gentemann, C.L.; Scott, J.P.; Mazzini, P.L.F.; Pianca, C.; Akella, S.; Minnett, P.J.; Cornillon, P.; Fox-Kemper, B.; Cetinić, I.; Chin, T.M.; et al. Saildrone: Adaptively sampling the marine environment. Bull. Am. Meteorol. Soc. 2020, 101, E744–E762. [Google Scholar] [CrossRef]
- Chin, T.M.; Vazquez-Cuervo, J.; Armstrong, E.M. A multi-scale high-resolution analysis of global sea surface temperature. Remote Sens. Environ. 2017, 200, 154–169. [Google Scholar] [CrossRef]
- JPL MUR MEaSUREs Project. 2015. GHRSST Level 4 MUR Global Foundation Sea Surface Temperature Analysis. Ver. 4.1. PO.DAAC, CA, USA. Available online: https://podaac.jpl.nasa.gov/dataset/MUR-JPL-L4-GLOB-v4.1 (accessed on 1 November 2023).
- Meissner, T.; Wentz, F.J.; Le Vine, D.M. The salinity retrieval algorithms for the NASA Aquarius version 5 and SMAP version 3 releases. Remote Sens. 2018, 10, 1121. [Google Scholar] [CrossRef]
- Fore, A.G.; Yueh, S.H.; Tang, W.; Stiles, B.W.; Hayashi, A.K. Combined Active/Passive Retrievals of Ocean Vector Wind and Sea Surface Salinity with SMAP. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7396–7404. [Google Scholar] [CrossRef]
- Fore, A.; Yueh, S.; Tang, W.; Hayashi, A. SMAP Salinity and Wind Speed Data User’s Guide; California Institute of Technology: Pasadena, CA, USA, 2020; p. 42. [Google Scholar]
- Hall, K.; Daley, A.; Whitehall, S.; Sandiford, S.; Gentemann, C.L. Validating Salinity from SMAP and HYCOM Data with Saildrone Data during EUREC4A-OA/ATOMIC. Remote Sens. 2022, 14, 3375. [Google Scholar] [CrossRef]
- Hoyer, S.; Hamman, J. xarray: N-D labeled Arrays and Datasets in Python. J. Open Res. Softw. 2017, 5, 10. [Google Scholar] [CrossRef]
- Maze, G.; Mercier, H.; Fablet, R.; Tandeo, P.; Radcenco, M.L.; Lenca, P.; Feucher, C.; Le Goff, C. Coherent heat patterns revealed by unsupervised classification of Argo temperature profiles in the North Atlantic Ocean. Prog. Oceanogr. 2017, 151, 275–292. [Google Scholar] [CrossRef]
- Jones, D.C.; Holt, H.J.; Meijers, A.J.S.; Shuckburgh, E.F. Unsupervised clustering of Southern Ocean Argo float temperature profiles. J. Geophys. Res. Ocean. 2019, 124, 390–402. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Müller, A.; Nothman, J.; Louppe, G.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- García-Reyes, M.; Largier, J.L. Seasonality of coastal upwelling off central and northern California: New insights, including temporal and spatial variability. J. Geophys. Res. Ocean. 2012, 117, 7629. [Google Scholar] [CrossRef]
- Gentemann, C.L.; Fewings, M.R.; García-Reyes, M. Satellite sea surface temperatures along the West Coast of the United States during the 2014–2016 northeast Pacific marine heat wave. Geophys. Res. Lett. 2017, 44, 312–319. [Google Scholar] [CrossRef]
- García-Reyes, M.; Sydeman, W.J. California Multivariate Ocean Climate Indicator (MOCI) [Data set, V2]. Farallon Institute Website. 2017. Available online: http://www.faralloninstitute.org/moci (accessed on 1 May 2023).
- Thompson, A.R.; Bjorkstedt, E.P.; Bograd, S.J.; Fisher, J.L.; Hazen, E.L.; Leising, A.; Santora, J.A.; Satterthwaite, E.V.; Sydeman, W.J.; Alksne, M.; et al. State of the California Current Ecosystem in 2021: Winter is coming? Front. Mar. Sci. 2022, 9, 958727. [Google Scholar] [CrossRef]
- Lynn, R.J.; Simpson, J.J. The California Current System: The seasonal variability of its physical characteristics. J. Geophys. Res. Ocean. 1987, 92, 12947–12966. [Google Scholar] [CrossRef]
- Hristova, H.G.; Ladd, C.; Stabeno, P.J. Variability and trends of the Alaska Gyre from Argo and satellite altimetry. J. Geophys. Res. Ocean. 2019, 124, 5870–5887. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.; Manaster, A.; Lindsley, R.; Brewer, M.; Densberger, M. NASA/RSS SMAP Salinity: Version 6.0 Validated Release. RSS Tech. Rep. 2024, 01182. [Google Scholar]
- Meneghesso, C.; Seabra, R.; Broitman, B.R.; Wethey, D.S.; Burrows, M.T.; Chan, B.K.; Guy-Haim, T.; Ribeiro, P.A.; Rilov, G.; Santos, A.M.; et al. Remotely-sensed L4 SST underestimates the thermal fingerprint of coastal upwelling. Remote Sens. Environ. 2020, 237, 111588. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
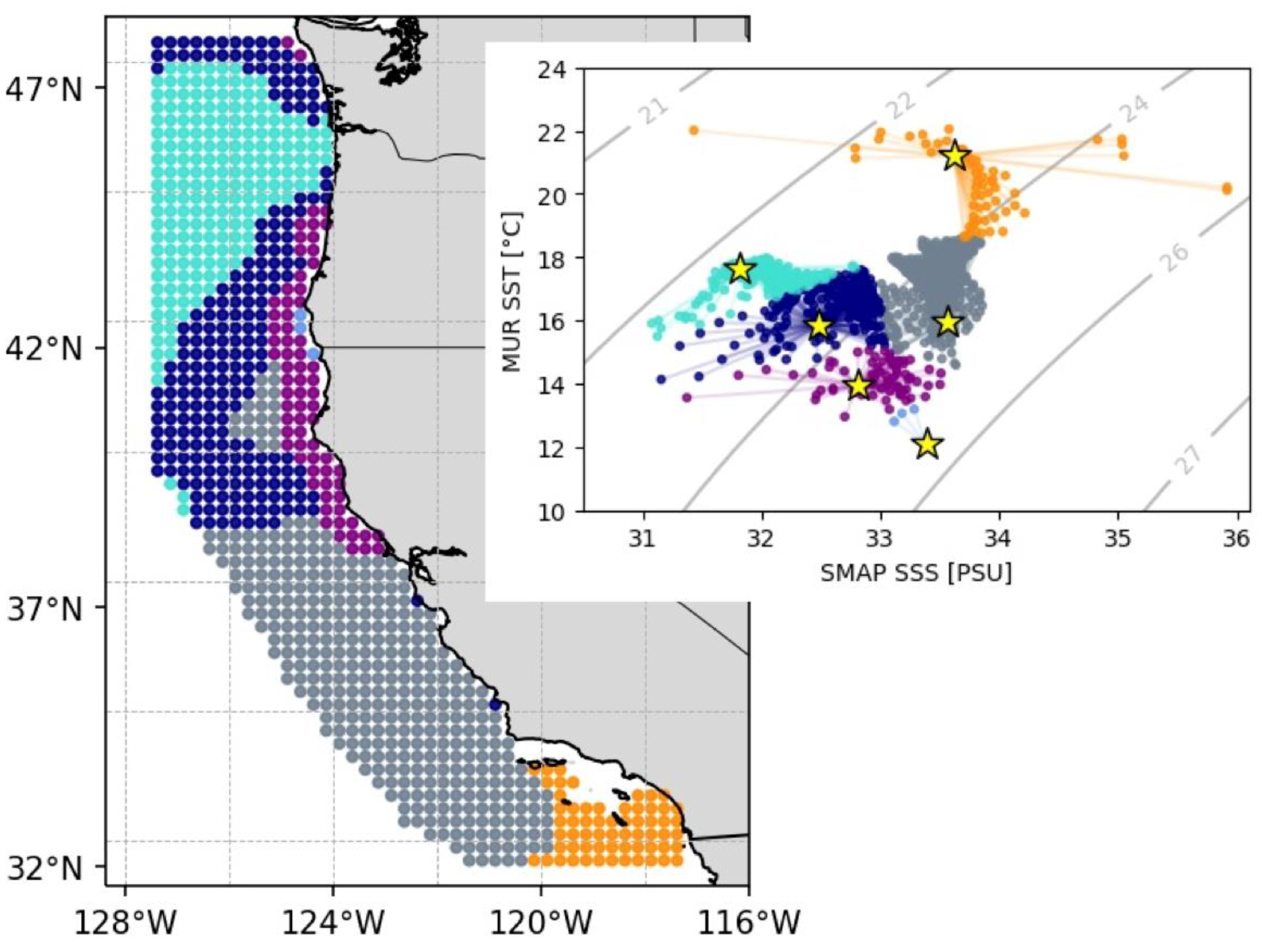
| Cluster Color | Characteristics | Region |
|---|---|---|
| 1—Orange | High SSS, High SST | Southern California Bight |
| 2—Gray | High SSS, Mid SST | Central California |
| 3—Blue | High SSS, Low SST | Northern California and Southern Oregon; coastal, associated with coastal upwelling |
| 4—Purple | Mid SSS, Mid/Low SST | Mostly along northern CCS and offshore of blue waters |
| 5—Navy | Low SSS, Mid SST | Mostly along northern CCS, between coastal upwelling waters and Columbia River waters |
| 6—Turquoise | Low SSS, High SST | Columbia River water mixed with northern CCS, and its extended plume offshore and south |
| Cluster Color | Orange | Gray | Blue | Purple | Navy | Turquoise |
|---|---|---|---|---|---|---|
| Proportion (%) | 88.0 | 69.3 | 43.3 | 69.6 | 69.2 | 89.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Reyes, M.; Koval, G.; Vazquez-Cuervo, J. Characterizing the California Current System through Sea Surface Temperature and Salinity. Remote Sens. 2024, 16, 1311. https://doi.org/10.3390/rs16081311
García-Reyes M, Koval G, Vazquez-Cuervo J. Characterizing the California Current System through Sea Surface Temperature and Salinity. Remote Sensing. 2024; 16(8):1311. https://doi.org/10.3390/rs16081311
Chicago/Turabian StyleGarcía-Reyes, Marisol, Gammon Koval, and Jorge Vazquez-Cuervo. 2024. "Characterizing the California Current System through Sea Surface Temperature and Salinity" Remote Sensing 16, no. 8: 1311. https://doi.org/10.3390/rs16081311
APA StyleGarcía-Reyes, M., Koval, G., & Vazquez-Cuervo, J. (2024). Characterizing the California Current System through Sea Surface Temperature and Salinity. Remote Sensing, 16(8), 1311. https://doi.org/10.3390/rs16081311