Application of a Terrestrial Laser Scanner (TLS) to the Study of the Séchilienne Landslide (Isère, France)

 , and
, and
Abstract
:
1. Introduction
2. The Séchilienne Landslide
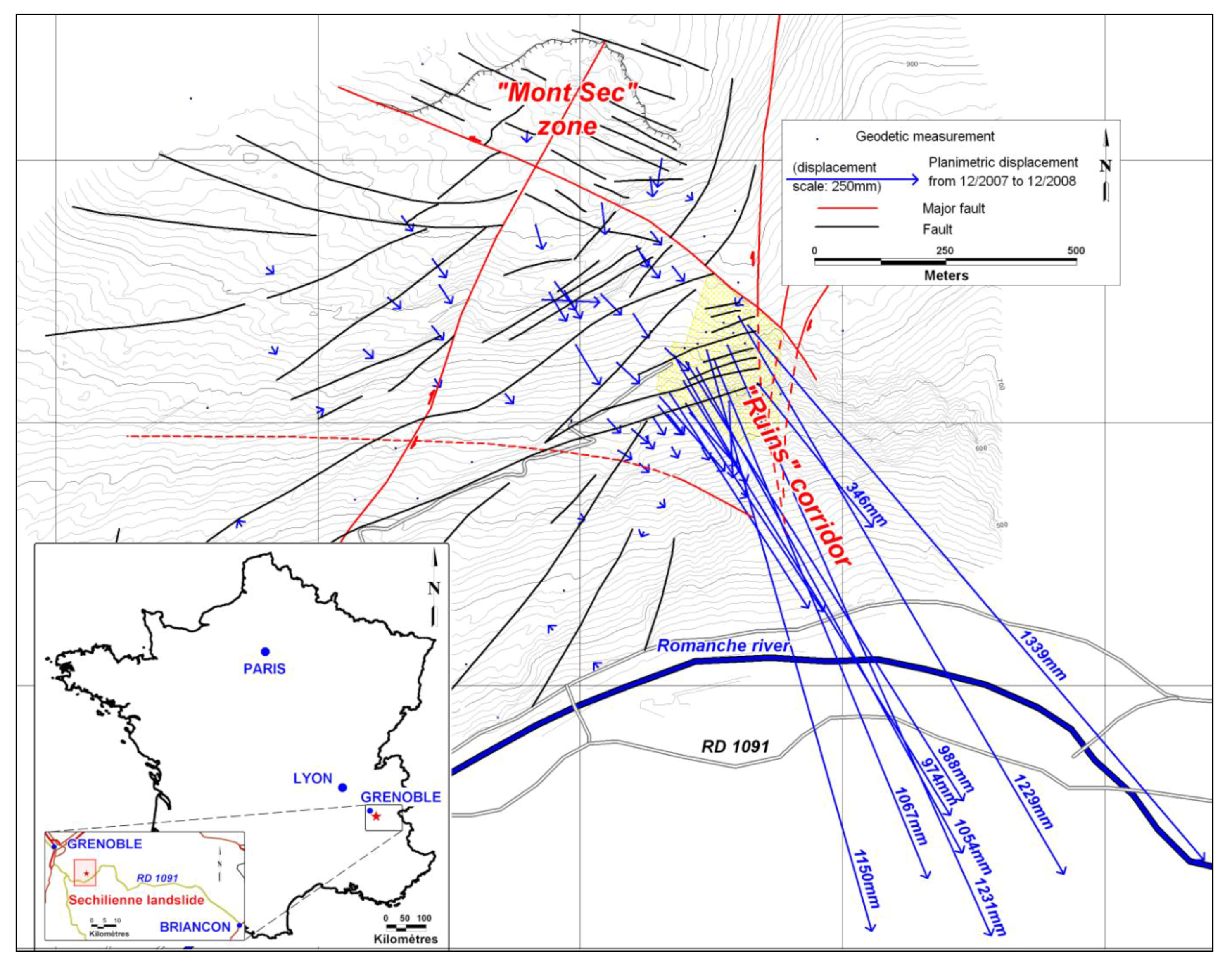
2.1. Landslide Description

2.2. Geological Context
2.3. Landslide Monitoring
3. Terrestrial Laser Scanner Methodology
3.1. Principle of TLS Acquisitions
3.2. Characteristics of the RIEGL LMS Z420i
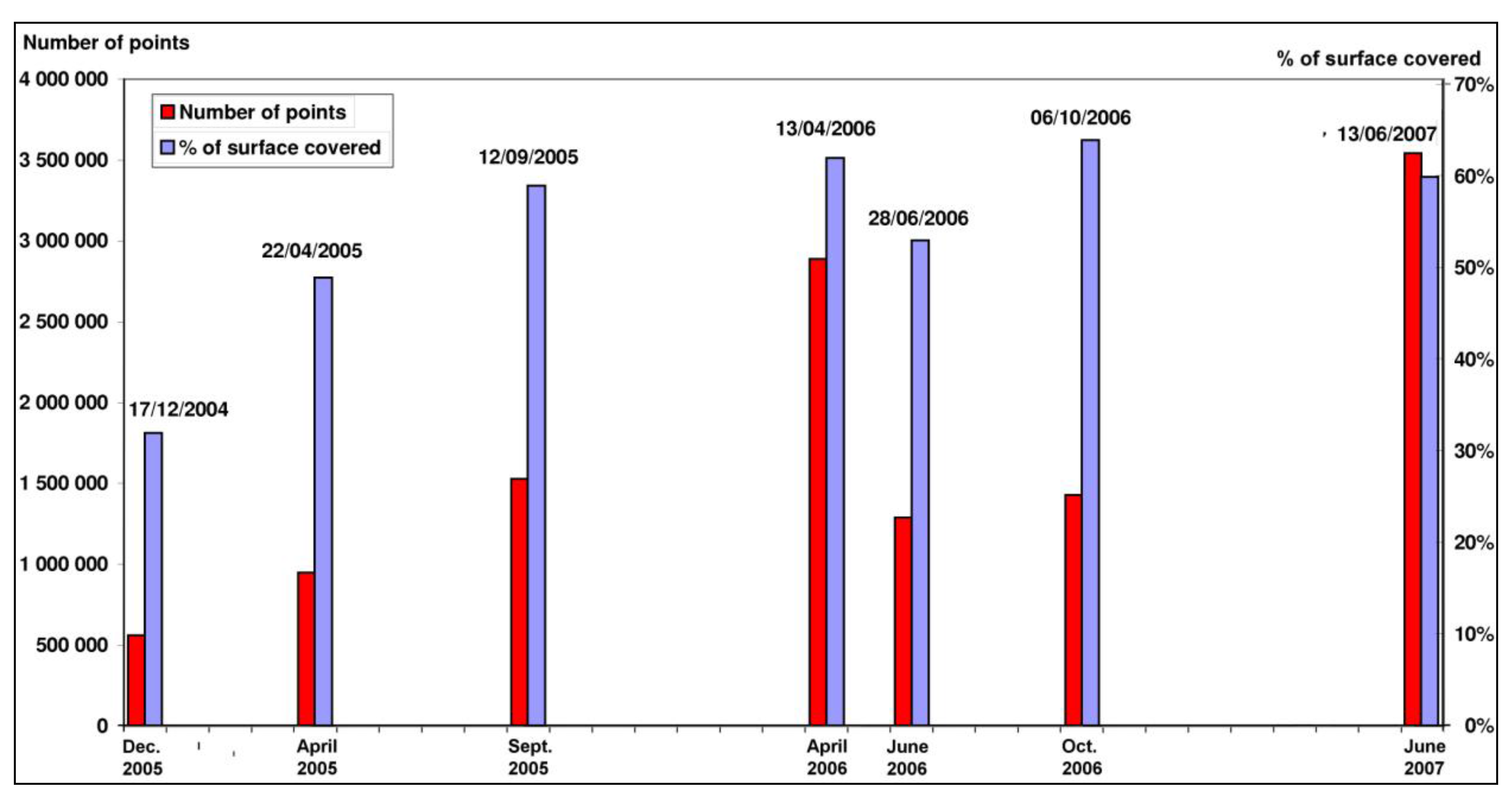
3.3. Acquisition, Registration and Georeferencing


3.4. Post Processing and TLS Accuracy

3.5. Displacement Characterization and Quantification
4. Results and Interpretations
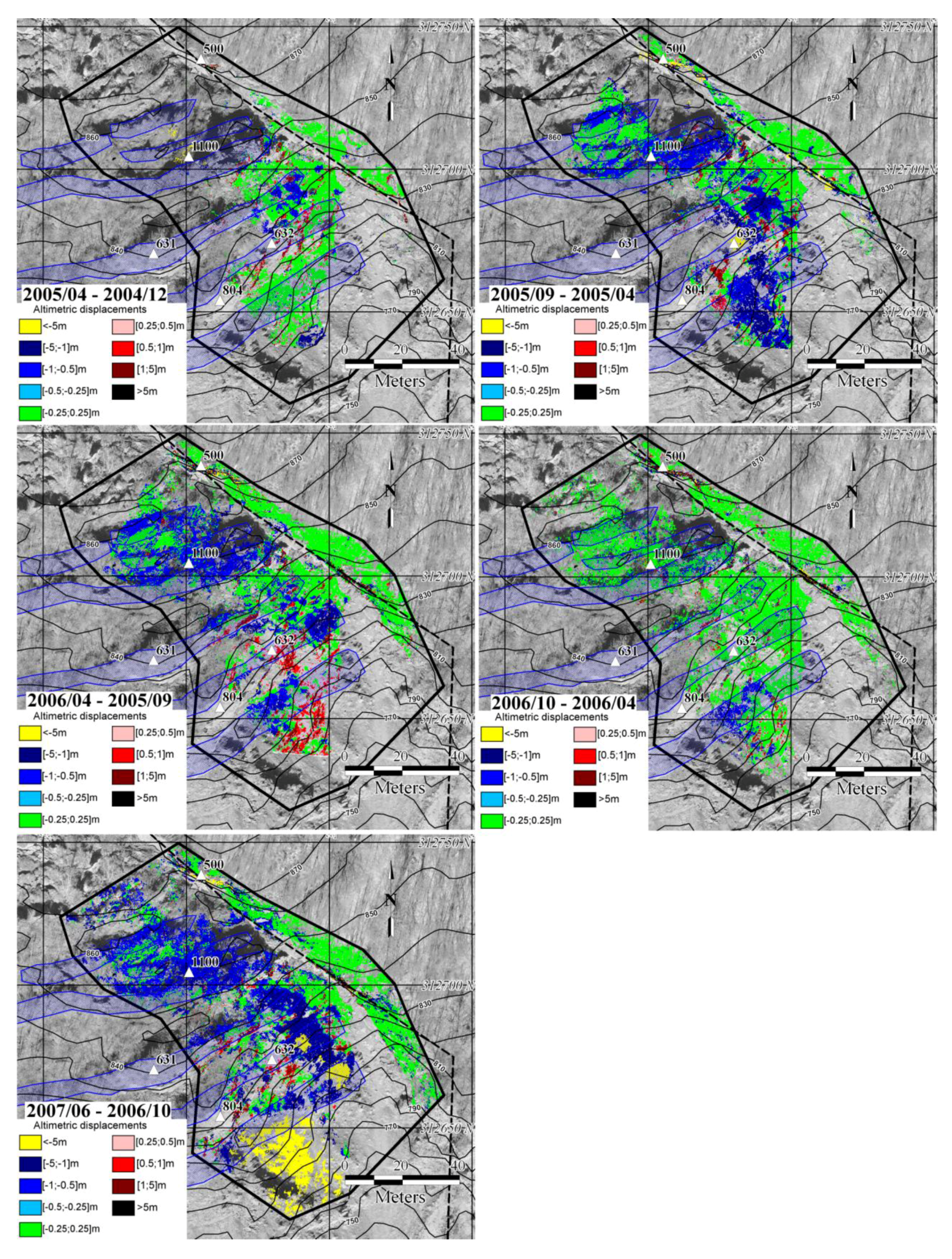
4.1. DEMs Subtractions



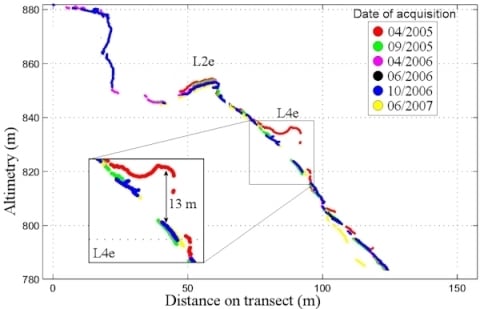
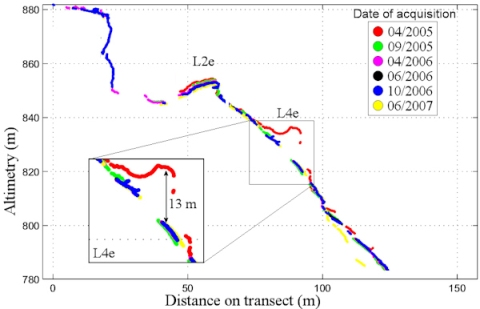
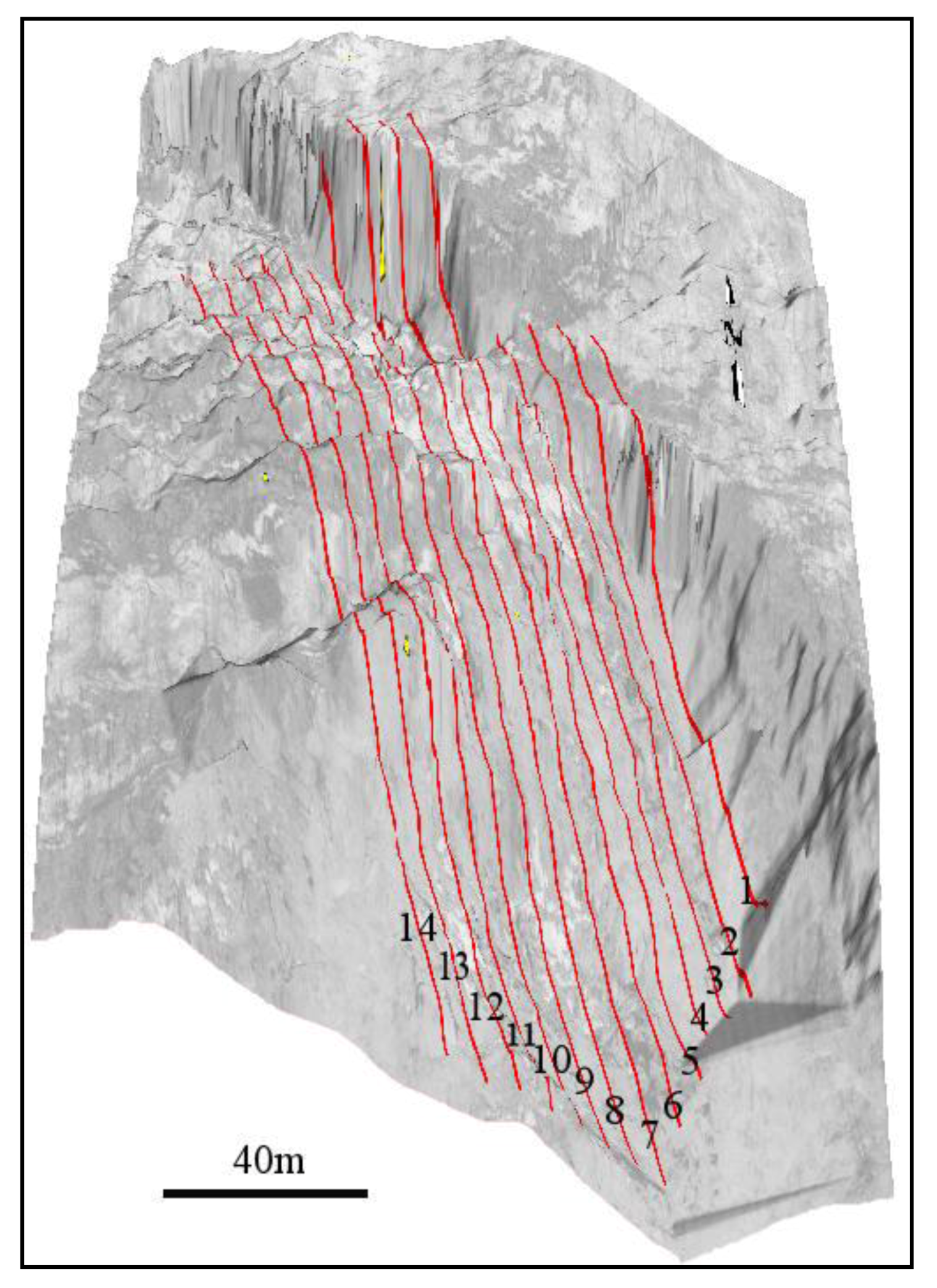
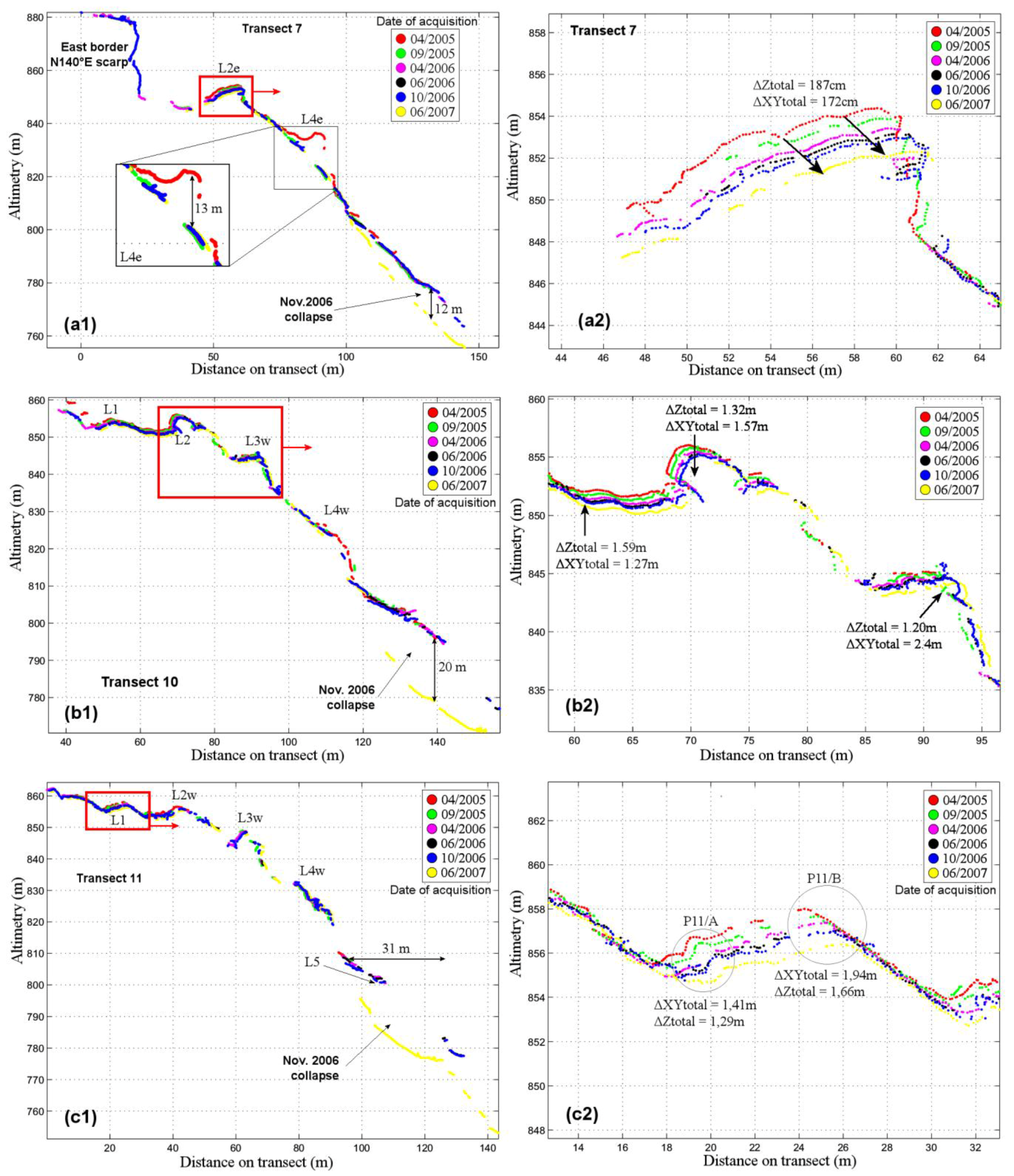
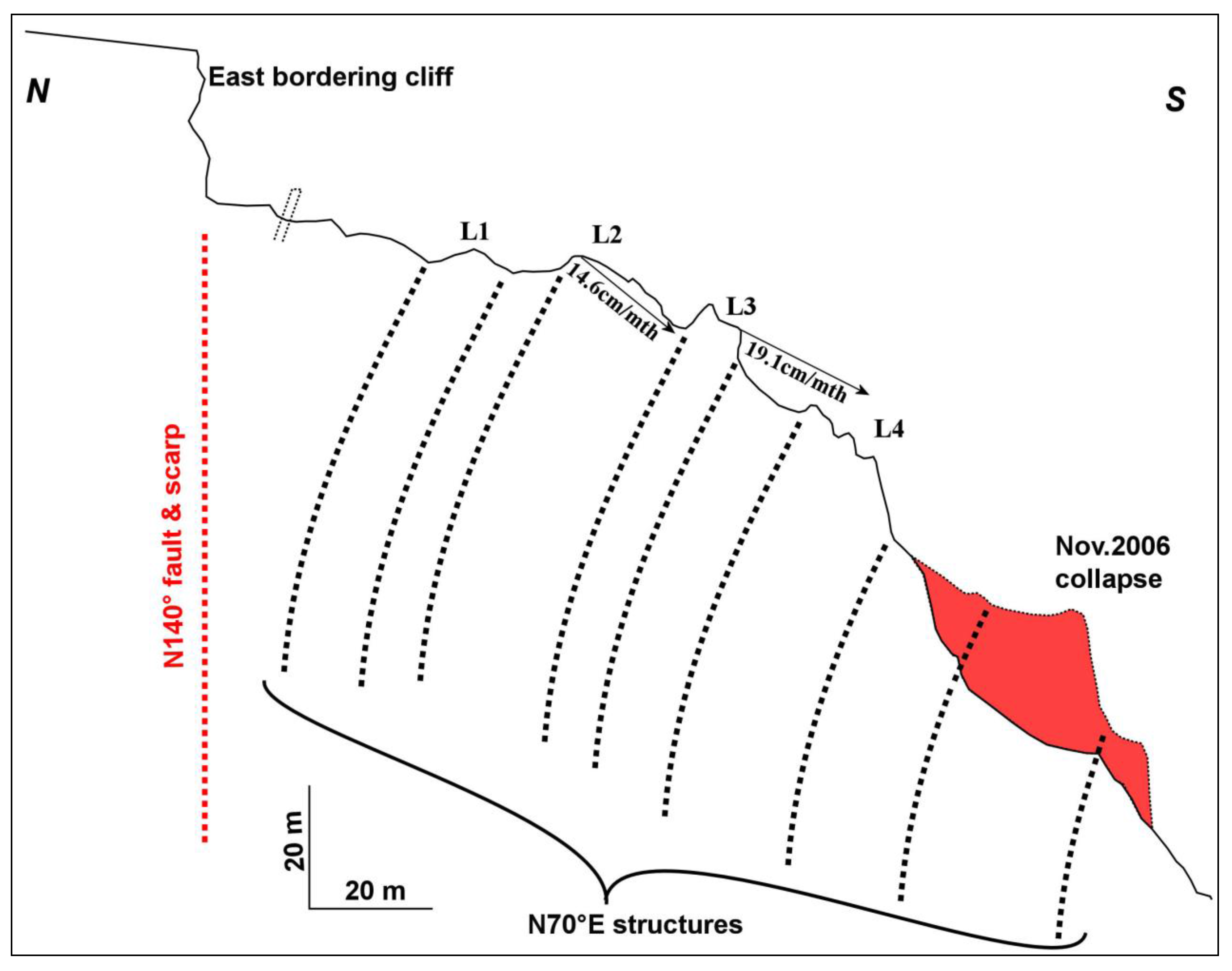
4.2. Displacement Measurements on Transects



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P11_A | |||||
| Dates | δXY (+/−4.24 cm) | δZ (+/−3 cm) | Dip | Amplitude (+/−4.24 cm) | Amplitude (+/−0.4 cm/mth) |
| 04/2005–09/2005 | 36 | −23 | 33°(+/−6°) | 43 | 9 |
| 09/2005–04/2006 | 44 | −23 | 28°(+/−5°) | 50 | 7 |
| 04/2006–06/2006 | 19 | −26,5 | 54°(+/−9°) | 33 | 11 |
| 06/2006–10/2006 | 10 | −11,8 | 50°(+/−19°) | 15 | 5 |
| 10/2006–06/2007 | 32 | −41,1 | 52°(+/−6°) | 52 | 7 |
| 04/2005–06/2007 | 141 | −129 | 42°(+/−2°) | 191 | 7 |
| P11_B | |||||
| Dates | δXY (+/−4.24 cm) | δZ (+/−3 cm) | Dip | Amplitude (+/−4.24 cm) | Amplitude (+/−0.4 cm/mth) |
| 04/2005–09/2005 | 59 | −36 | 31°(+/−4°) | 69 | 14 |
| 09/2005–04/2006 | 72 | −31,7 | 24°(+/−3°) | 79 | 11 |
| 04/2006–06/2006 | 23,9 | −30,6 | 52°(+/−8°) | 39 | 13 |
| 06/2006–10/2006 | 14,7 | −17,3 | 50°(+/−13°) | 23 | 8 |
| 10/2006–06/2007 | 23,1 | −49 | 65°(+/−5°) | 54 | 7 |
| 04/2005–06/2007 | 194 | −166 | 41°(+/−1°) | 255 | 10 |
| Target | Period between 11/2004 and 11/2005 | Period between 11/2005 and 11/2006 | ||||||
|---|---|---|---|---|---|---|---|---|
| δXYZ (cm) | δXYZ (cm/month) | Direction | Dip | δXYZ (cm) | δXYZ (cm/month) | Direction | Dip | |
| 631 | 125 | 10.4 | 151° | 30° | 111.2 | 9.2 | 151° | 30° |
| 1100 | 112 | 9.3 | 150° | 36° | 102.1 | 8.5 | 151° | 37° |
| 834 | 83 | 6.9 | 150° | 30° | 77.6 | 6.4 | 151° | 28° |
4.3. Interpretation and Instability Considerations

5. Conclusions and Perspectives
Acknowledgments
References and Notes
- Angeli, M.C.; Pasuto, A.; Silvano, S. A critical review of landslide monitoring experiences. Eng. Geol. 2000, 55, 133–147. [Google Scholar] [CrossRef]
- Squarzoni, C.; Delacourt, C.; Allemand, P. Differential single-frequency GPS monitoring of the La Valette landslide (French Alps). Eng. Geol. 2005, 79, 215–229. [Google Scholar] [CrossRef]
- Bitelli, G.; Dubbini, M.; Zanutta, A. Terrestrial laser scanning and digital photogrammetry techniques to monitor landslide bodies. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; In Proceedings of the XXth ISPRS Congress: Geo-Imagery Bridging Continents, Istanbul, Turkey, July 12–23, 2004; Volume XXXV, Part 5. pp. 246–251.
- Delacourt, C.; Allemand, P.; Berthier, E.; Raucoules, D.; Casson, B.; Grandjean, P.; Pambrun, C.; Varrel, E. Remote-sensing techniques for analysing landslide kinematics: A review. Bull. Soc. Géolog. France 2007, 178, 89–100. [Google Scholar] [CrossRef]
- Oppikofer, T.; Jaboyedoff, M.; Keusen, H.-R. Collapse at the eastern Eiger flank in the Swiss Alps. Nature Geosci. 2008, 1, 531–535. [Google Scholar] [CrossRef]
- Oppikofer, T.; Jaboyedoff, M.; Blikra, L.; Derron, M.-H.; Metzer, R. Characterization and monitoring of the Åknes rockslide using terrestrial laser scanning. Nat. Hazards Earth Syst. Sci. 2009, 9, 1003–1019. [Google Scholar] [CrossRef]
- Teza, G.; Galgaro, A.; Zaltron, N.; Genevois, R. Terrestrial laser scanner to detect landslide displacement fields: a new approach. Int. J. Remote Sens. 2007, 28, 3425–3446. [Google Scholar] [CrossRef]
- Abellán, A.; Jaboyedoff, M.; Oppikofer, T.; Vilaplana, J.M. Detection of millimetric deformation using a terrestrial laser scanner: Experiment and application to a rockfall event. Nat. Hazards Earth Syst. Sci. 2009, 9, 365–372. [Google Scholar] [CrossRef]
- Travelletti, J.; Oppikofer, T.; Delacourt, C.; Malet, J.-P.; Jaboyedoff, M. Monitoring landslide displacements during a controlled rain experiment using a long-range terrestrial laser scanning (TLS). In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; In Proceedings of XXIst ISPRS Congress: Commission V, WG 3, Beijing, China, July 3–11, 2008; Volume 37, Part B5. pp. 485–490.
- Abellán, A.; Vilaplana, J. M.; Martínez, J. Application of a long-range terrestrial laser scanner to a detailed rockfall study at Vall de Núria (Eastern Pyrenees, Spain). Eng. Geol. 2006, 88, 136–148. [Google Scholar] [CrossRef]
- Bauer, A.; Paar, G.; Kaltenbock, A. Mass movement monitoring using Terrestrial Laser Scanner for rock fall management. In Geo-information for Disaster Management; Van Oosterom, P., Zlatanova, S., Fendel, E.M., Eds.; Springer: Berlin, Germany, 2005; pp. 393–406. [Google Scholar]
- Antoine, P.; Camporota, P.; Giraud, A.; Rochet, L. La menace d’écroulement aux Ruines de Séchilienne (Isère). Bulletin des laboratoires des Ponts et Chaussées 1987, 150/151, 55–64. [Google Scholar]
- Pothérat, P.; Alfonsi, P. Les mouvements de Séchilienne (Isère)—Prise en compte de l'héritage structural pour leur simulation numérique. Revue française de géotechnique 2001, 95/96, 117–131. [Google Scholar]
- Alfonsi, P. Relation entre les paramètres hydrologiques et la vitesse dans les glissements de terrains. Exemple de la Clapière et de Séchilienne (France). Revue française de géotechnique 1997, 79, 3–12. [Google Scholar]
- Durville, J.-L.; Effendiantz, L.; Pothérat, P.; Marchesini, P. The Séchilienne landslide. In Identification and Mitigation of Large Landslide Risks in Europe: Advances in Risk Assessment; Bonnard, C., Forlati, F., Scavia, C., Eds.;IMIRILAND Project: European Commission—Fifth Framework Program; A.A. Balkema Publishers: London, UK, 2004; pp. 253–269.
- Leroux, O.; Schwartz, S.; Gamond, J.-F.; Jongmans, D.; Bourles, D.; Braucher, R.; Mahaney, W.; Carcaillet, J.; Leanni, L. CRE dating on the head scarp of a major landslide (Séchilienne, French Alps), age constraints on Holocene kinematics. Earth Planet. Sci. Lett. 2009, 280, 236–245. [Google Scholar] [CrossRef]
- Duranthon, J.-P.; Effendiantz, L. Le versant instable des “Ruines” de Séchilienne. Point sur l’activité du phénomène et présentation du nouveau dispositif de gestion de la télésurveillance. Bulletin des laboratoires des Ponts et Chaussées 2004, 252/253, 29–48. [Google Scholar]
- Kasperski, J.; Jongmans, D.; Lagabrielle, R.; Pothérat, P.; Méric, O. Apport des reconnaissances profondes par méthodes géophysiques sur le mouvement de versant de Séchilienne (Isère). In Proceedings of Rock Slope Stability, Paris, France, November 24–25, 2010.
- Baltsavias, E. Airborne laser scanning: basic relations and formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Lichti, D.D.; Gordon, S.J.; Stewart, M.P. Ground-based laser scanners: Operation, systems and applications. Geomatica 2002, 56, 21–33. [Google Scholar]
- Slob, S.; Hack, R. 3-D Terrestrial Laser Scanning as a New Field Measurement and Monitoring Technique. In Engineering Geology for Infrastructure Planning in Europe. A European Perspective; Lecture Notes in Earth Sciences; Hack, R., Azzam, R., Charlier, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; Volume 104, pp. 179–190. [Google Scholar]
- Riegl, J.; Studnicka, N.; Ullrich, A. Merging and processing of laser scan data and high-resolution digital images acquired with a hybrid 3D laser sensor. In Proceedings of CIPA, XIXth International Symposium, Antalya, Turkey, 30 September–4 October, 2003.
- Besl, P.; McKay, N. A method for registration of 3-d shapes. IEEE Trans. Pat. Anal. Mach. Intel. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Prokop, A.; Panholzer, H. Assessing the capability of terrestrial scanning for monitoring slow moving landslides. Nat. Hazards Earth Syst. Sci. 2009, 9, 1921–1928. [Google Scholar] [CrossRef]
- Vengeon, J.-M.; Giraud, A.; Antoine, P.; Rochet, L. Contribution à l’analyse de la déformation et de la rupture des grands versants rocheux en terrain cristallophyllien. Can. Geotech. J. 1999, 26, 1123–1136. [Google Scholar] [CrossRef]
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Kasperski, J.; Delacourt, C.; Allemand, P.; Potherat, P.; Jaud, M.; Varrel, E. Application of a Terrestrial Laser Scanner (TLS) to the Study of the Séchilienne Landslide (Isère, France). Remote Sens. 2010, 2, 2785-2802. https://doi.org/10.3390/rs122785
Kasperski J, Delacourt C, Allemand P, Potherat P, Jaud M, Varrel E. Application of a Terrestrial Laser Scanner (TLS) to the Study of the Séchilienne Landslide (Isère, France). Remote Sensing. 2010; 2(12):2785-2802. https://doi.org/10.3390/rs122785
Chicago/Turabian StyleKasperski, Johan, Christophe Delacourt, Pascal Allemand, Pierre Potherat, Marion Jaud, and Eric Varrel. 2010. "Application of a Terrestrial Laser Scanner (TLS) to the Study of the Séchilienne Landslide (Isère, France)" Remote Sensing 2, no. 12: 2785-2802. https://doi.org/10.3390/rs122785
APA StyleKasperski, J., Delacourt, C., Allemand, P., Potherat, P., Jaud, M., & Varrel, E. (2010). Application of a Terrestrial Laser Scanner (TLS) to the Study of the Séchilienne Landslide (Isère, France). Remote Sensing, 2(12), 2785-2802. https://doi.org/10.3390/rs122785