Simulation of Image Performance Characteristics of the Landsat Data Continuity Mission (LDCM) Thermal Infrared Sensor (TIRS)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results and Discussion
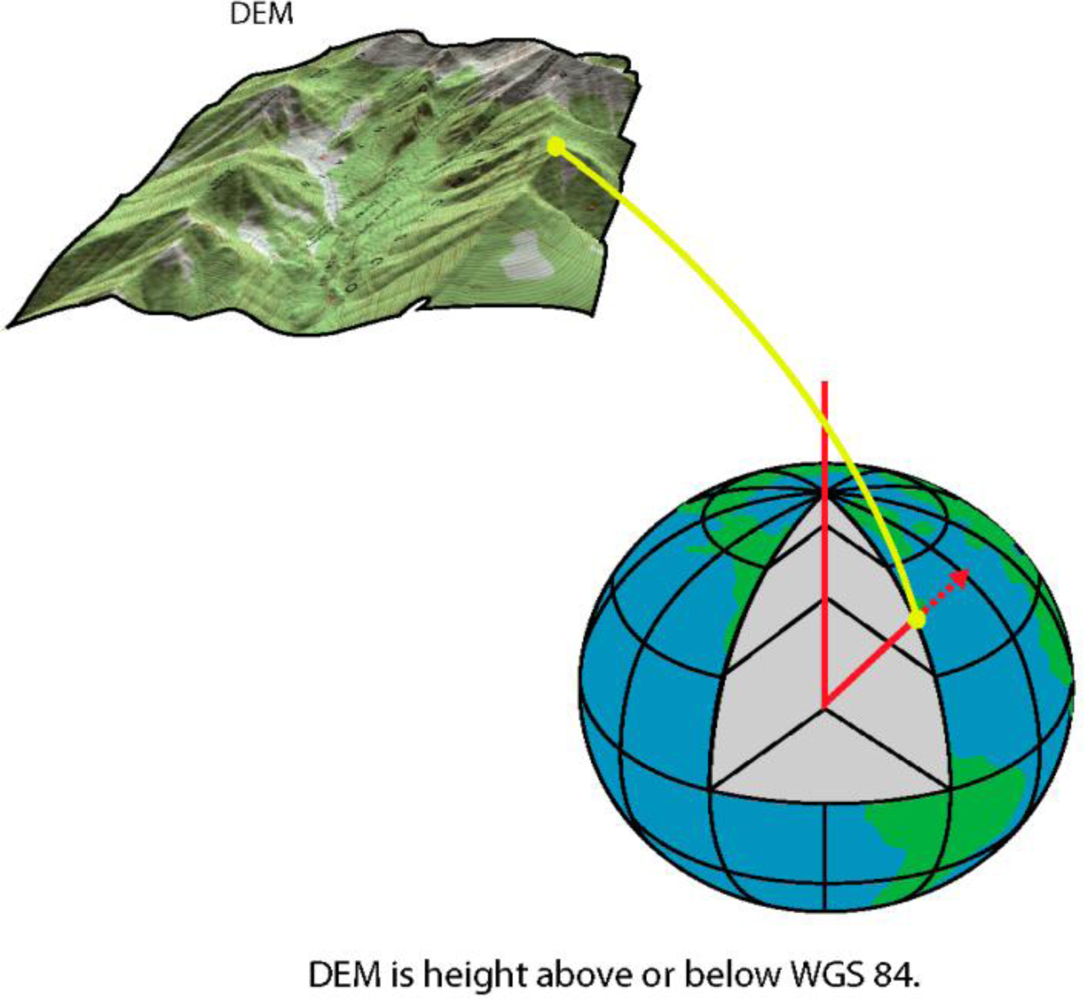
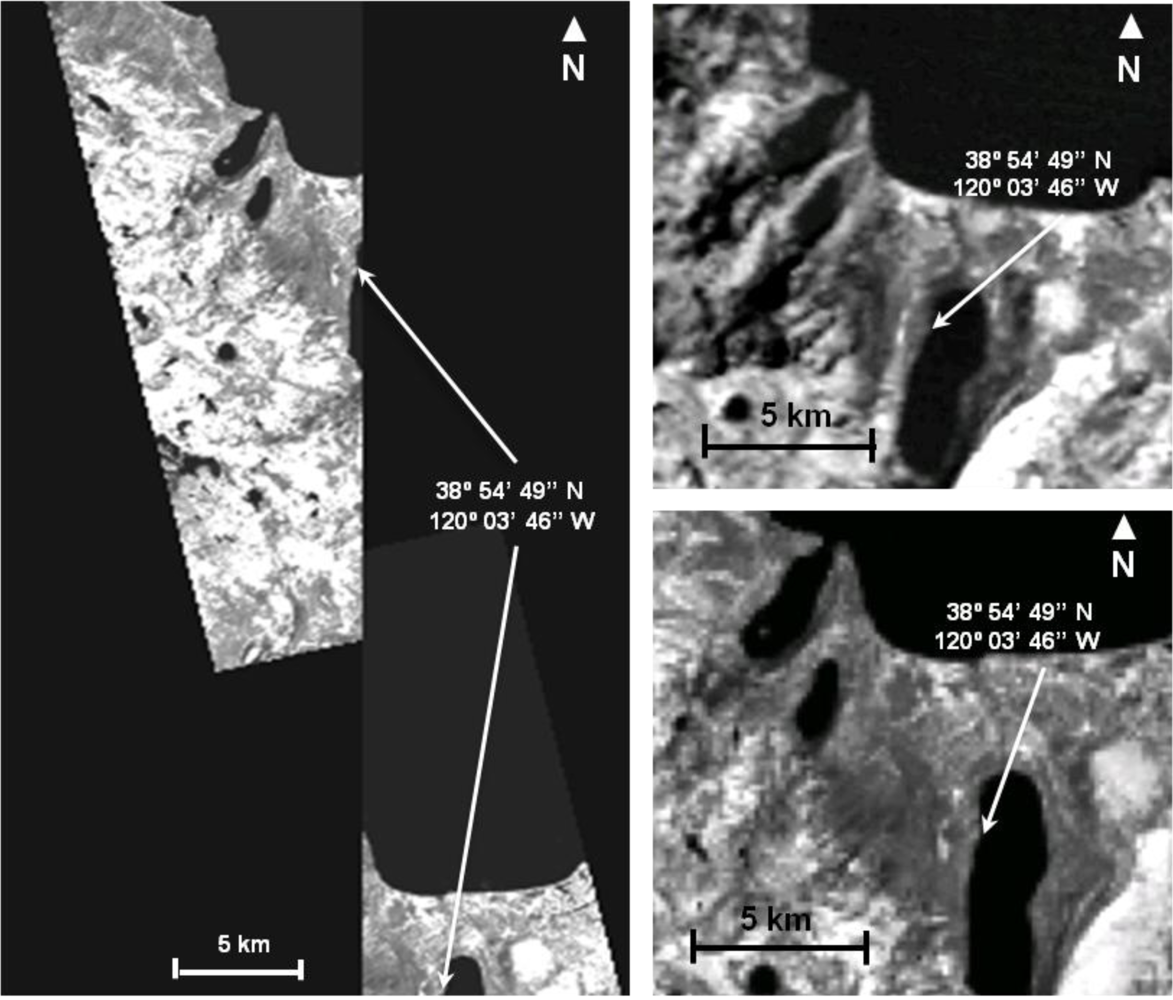
2.1. Orbit, Earth Geometry and External Sensor Models
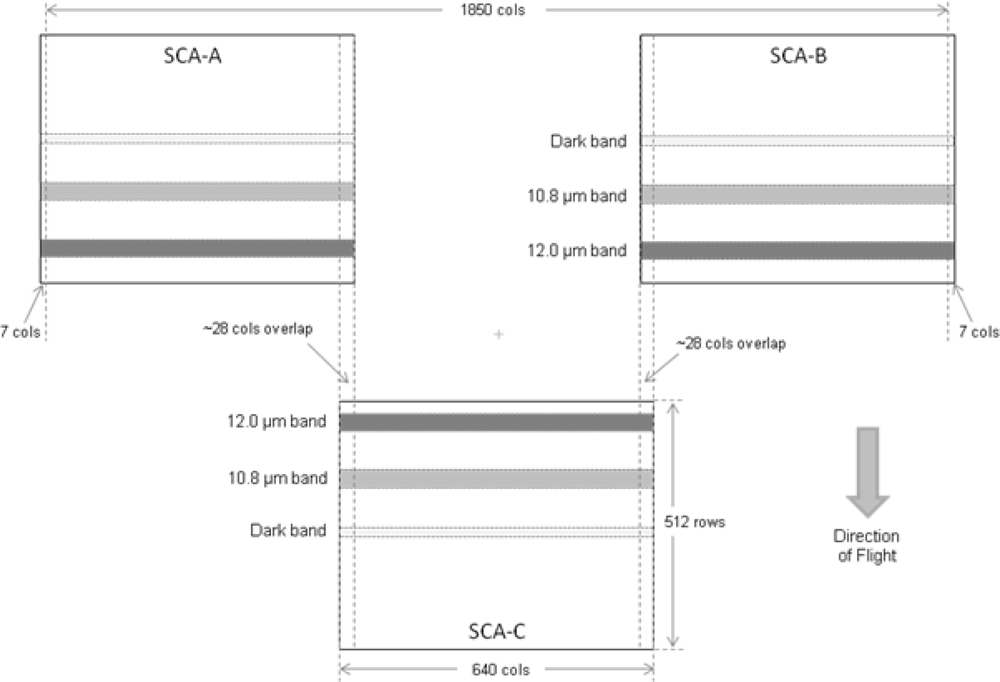
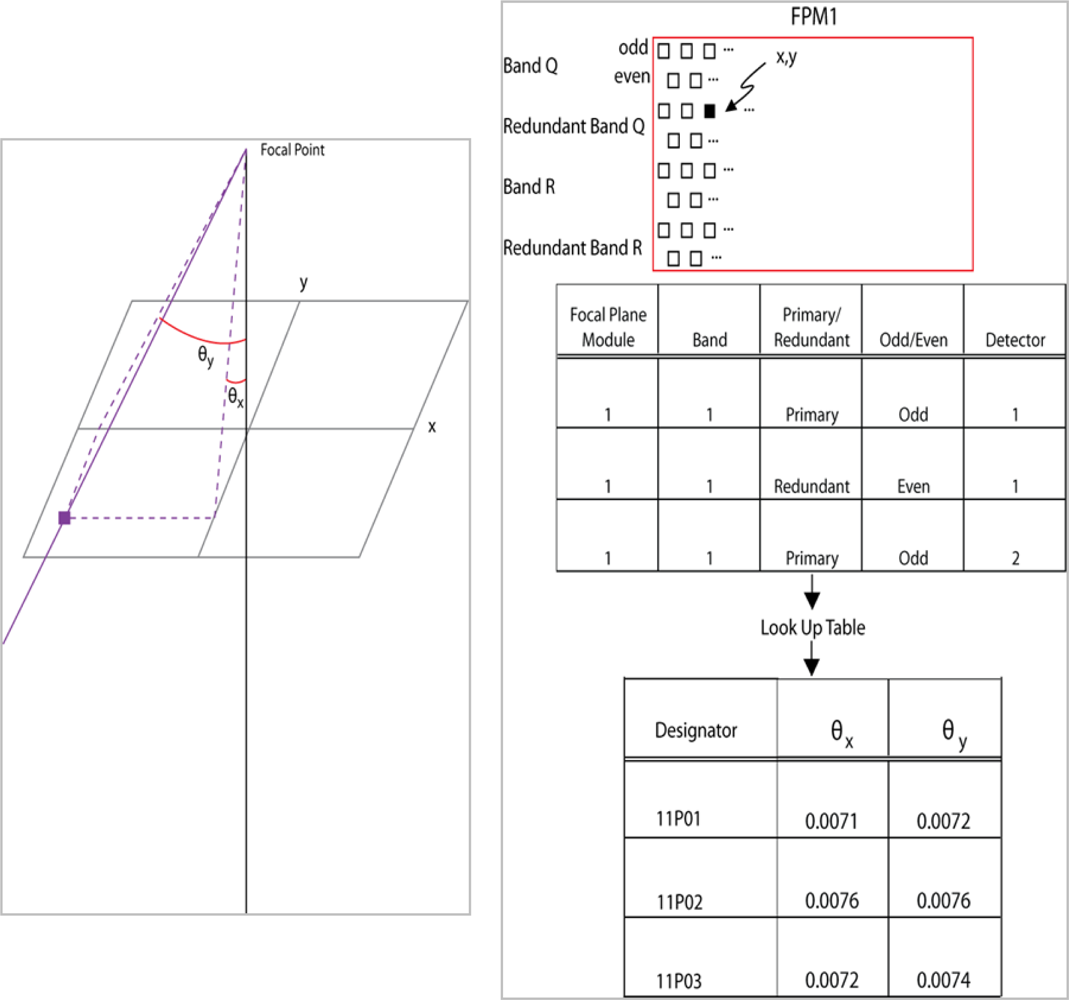
2.2. Internal Geometry Models
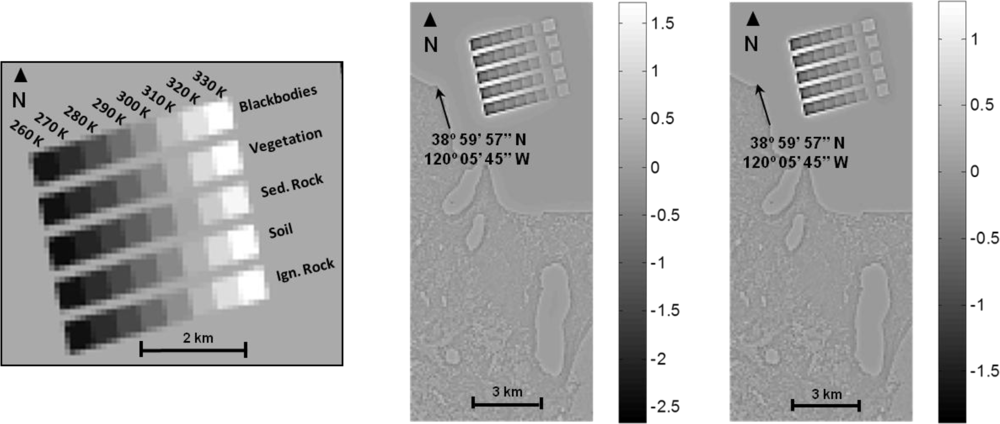
2.3. Simulated Scene
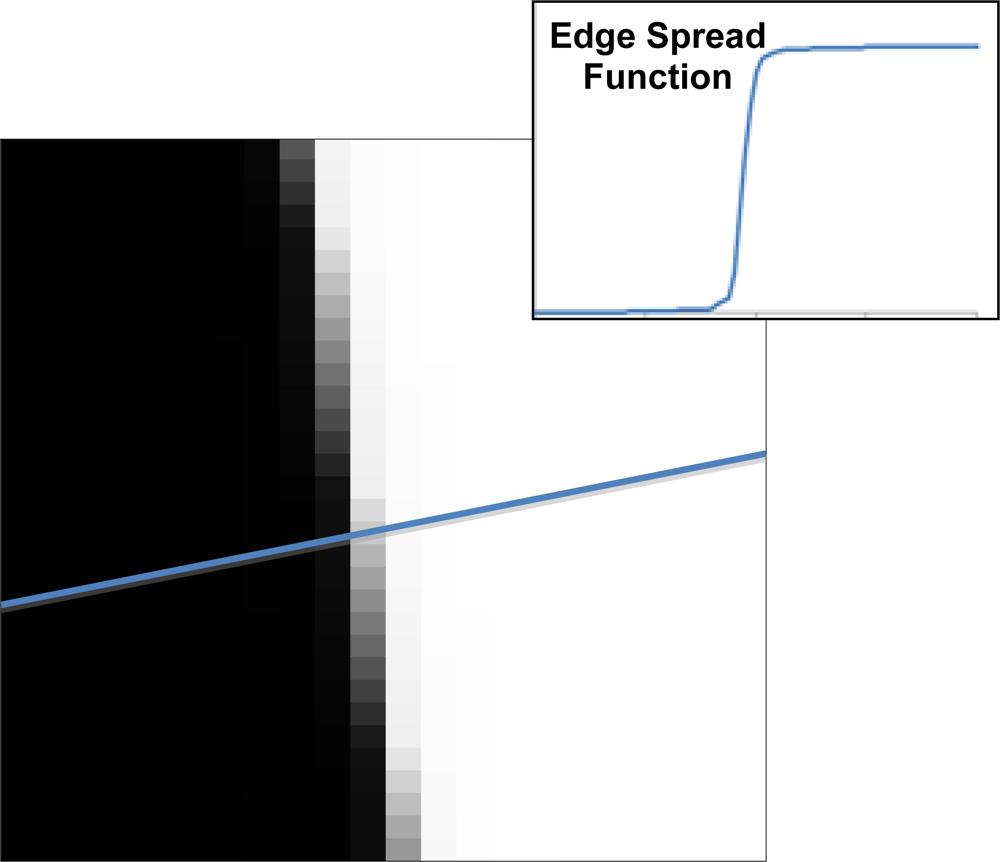
2.4. Simulation of the Potential Impact of TIRS Edge Response Waiver
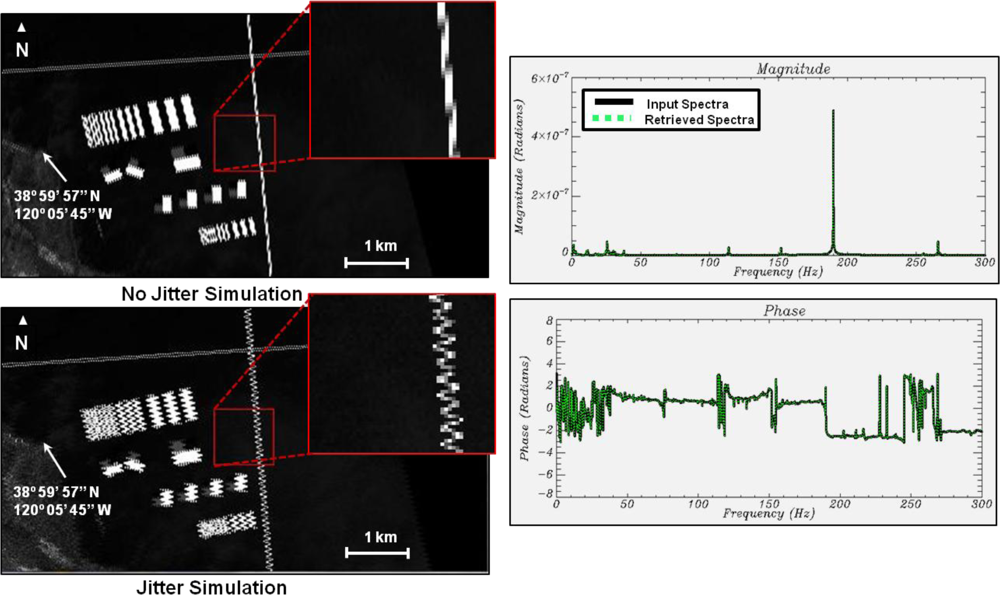
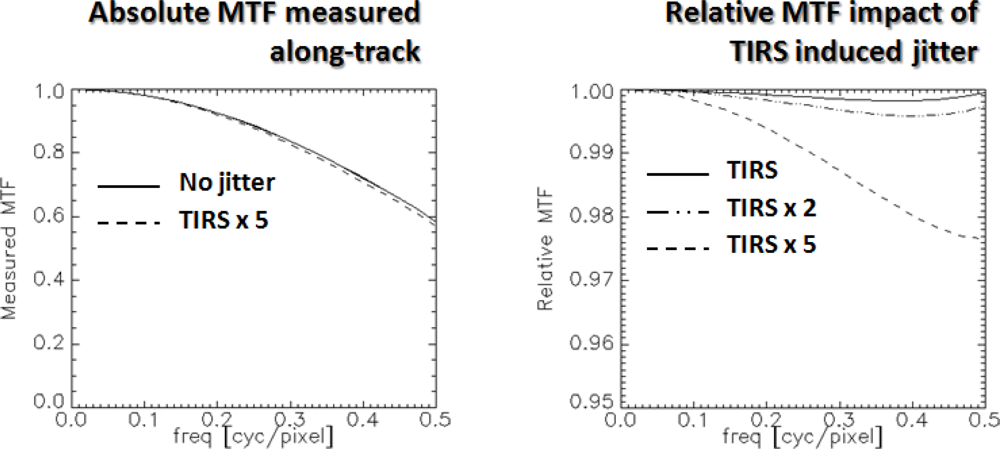
2.5. Impact of TIRS Cryocooler on Image Quality
2.6. Impact of Relative Spectral Response (RSR) Variation on TIRS Streaking and Banding
- Q indicates the quantization process (12 bits for TIRS) [counts/volt];
- Gj is average gain of the jth array [volts/(w·cm−2·sr−1·μm−1)];
- gij is the relative gain of the ith detector compared to the array average for array j [unitless];
- Lλij is the spectral radiance reaching the ith detector in the jth array computed by DIRSIG [w·cm−2·sr−1·μm−1];
- RSRij is the relative spectral response of the i,jth detector;
- Bj is the average bias of the jth array [volts];
- bij is the deviation of the bias of the ith detector in an array j from the array average [volts];
- λ is the wavelength [μm] and
- nij is the detector specific noise [volts].
2.7. Potential Use of Side Slither Maneuvers for Flat Field Calibration
3. Conclusions
References
- Irons, J.R.; Dwyer, J.L. An overview of the Landsat Data Continuity Mission. Proc. SPIE 2010. [Google Scholar] [CrossRef]
- Reuter, D.; Richardson, C.; Irons, J.; Allen, R.; Anderson, M.; Budinoff, J.; Casto, G.; Coltharp, C.; Finneran, P.; Forsbacka, B.; et al. The Thermal Infrared Sensor on the Landsat Data Continuity Mission. Proceedings of the 2010 IEEE, International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 754–757.
- Jhabvala, M.; Reuter, D.; Choi, K.; Jhabvala, C.; Sundaram, M. QWIP-based thermal infrared sensor for the Landsat Data Continuity Mission. Infrared Phys. Techn 2009, 52, 424–429. [Google Scholar]
- Schott, J.R. Remote Sensing: The Image Chain Approach, 2nd ed; Oxford University Press: New York, NY, USA, 2007. [Google Scholar]
- Schott, J.R.; Brown, S.D.; Raqueño, R.V.; Gross, H.N.; Robinson, G. An advanced synthetic image generation model and its application to multi/hyperspectral algorithm development. Can. J. Remote Sens 1999, 25, 99–111. [Google Scholar]
- Vallado, D.A.; Crawford, P. SGP4 Orbit Determination. Proceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. AIAA 2008-6770.
- Schott, J.R.; Raqueño, R.V.; Raqueño, N.G.; Brown, S.D. A Synthetic Sensor/Image Simulation Tool to Support the Landsat Data Continuity Mission (LDCM). Proceedings of ASPRS 2010 Annual Conference, San Diego, CA, USA, 26–30 April 2010.
- Hulley, G.C.; Hook, S.J.; Baldridge, A.M. ASTER land surface emissivity database of California and Nevada. Geophys. Res. Lett 2008, 35, L13401. [Google Scholar]
- Scanlan, N.W.; Schott, J.R.; Brown, S.D. Performance analysis of improved methodology for incorporation of spatial/spectral variability in synthetic hyperspectral imagery. Proc. SPIE 2003, 5159, 319–330. [Google Scholar]
- Ward, J.T.; Schott, J.R.; Sanders, N.J.; Brown, S.D. Driving Realistic Texture in Simulated Long Wave Infrared Imagery. Proceedings of 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 6–11 July 2008; 3, pp. 728–731.
- Storey, J. Landsat 7 on-orbit modulation transfer function estimation. Proc. SPIE 2001, 4540, 50–61. [Google Scholar]
- Gerace, A.; Gartley, M.; Schott, J.; Raqueño, N.; Raqueño, R. Data-driven simulations of the Landsat Data Continuity Mission (LDCM) platform. Proc. SPIE 2011, 8048, 804815. [Google Scholar]
- Burns, P. Slanted-Edge MTF for Digital Camera and Scanner Analysis. Proceedings of IS&T 2000 PICS Conference, Portland, OR, USA, March 2000; pp. 135–138.
- Genberg, V.; Michels, G. Integrated modeling of jitter MTF due to random loads. Proc. SPIE 2011, 8127, 81270H–81270H-9. [Google Scholar]
- Montanaro, M.; Reuter, D.C.; Markham, B.L.; Thome, K.J.; Lunsford, A.W.; Jhabvala, M.D.; Rohrbach, S.O.; Gerace, A.D. Spectral analysis of the primary flight focal plane arrays for the thermal infrared sensor. Proc. SPIE 2011, 8048, 804816. [Google Scholar]
- Henderson, B.G.; Krause, K.S. Relative radiometric correction of Quickbird imagery using the sideslither technique on-orbit. Proc. SPIE 2004, 5542, 426–436. [Google Scholar]
- Montanaro, M.; Gerace, A.D. Tracking non-uniformity in the thermal infrared sensor through pre-launch measurements and simulated on-orbit data. Proc. SPIE 2012, 8390, 83902C. [Google Scholar]











Share and Cite
Schott, J.; Gerace, A.; Brown, S.; Gartley, M.; Montanaro, M.; Reuter, D.C. Simulation of Image Performance Characteristics of the Landsat Data Continuity Mission (LDCM) Thermal Infrared Sensor (TIRS). Remote Sens. 2012, 4, 2477-2491. https://doi.org/10.3390/rs4082477
Schott J, Gerace A, Brown S, Gartley M, Montanaro M, Reuter DC. Simulation of Image Performance Characteristics of the Landsat Data Continuity Mission (LDCM) Thermal Infrared Sensor (TIRS). Remote Sensing. 2012; 4(8):2477-2491. https://doi.org/10.3390/rs4082477
Chicago/Turabian StyleSchott, John, Aaron Gerace, Scott Brown, Michael Gartley, Matthew Montanaro, and Dennis C. Reuter. 2012. "Simulation of Image Performance Characteristics of the Landsat Data Continuity Mission (LDCM) Thermal Infrared Sensor (TIRS)" Remote Sensing 4, no. 8: 2477-2491. https://doi.org/10.3390/rs4082477
APA StyleSchott, J., Gerace, A., Brown, S., Gartley, M., Montanaro, M., & Reuter, D. C. (2012). Simulation of Image Performance Characteristics of the Landsat Data Continuity Mission (LDCM) Thermal Infrared Sensor (TIRS). Remote Sensing, 4(8), 2477-2491. https://doi.org/10.3390/rs4082477