Impact of Tree-Oriented Growth Order in Marker-Controlled Region Growing for Individual Tree Crown Delineation Using Airborne Laser Scanner (ALS) Data

Abstract
:1. Introduction
2. Materials
2.1. Study Area
2.2. Remotely Sensed Data
2.3. Reference Data
3. Methods
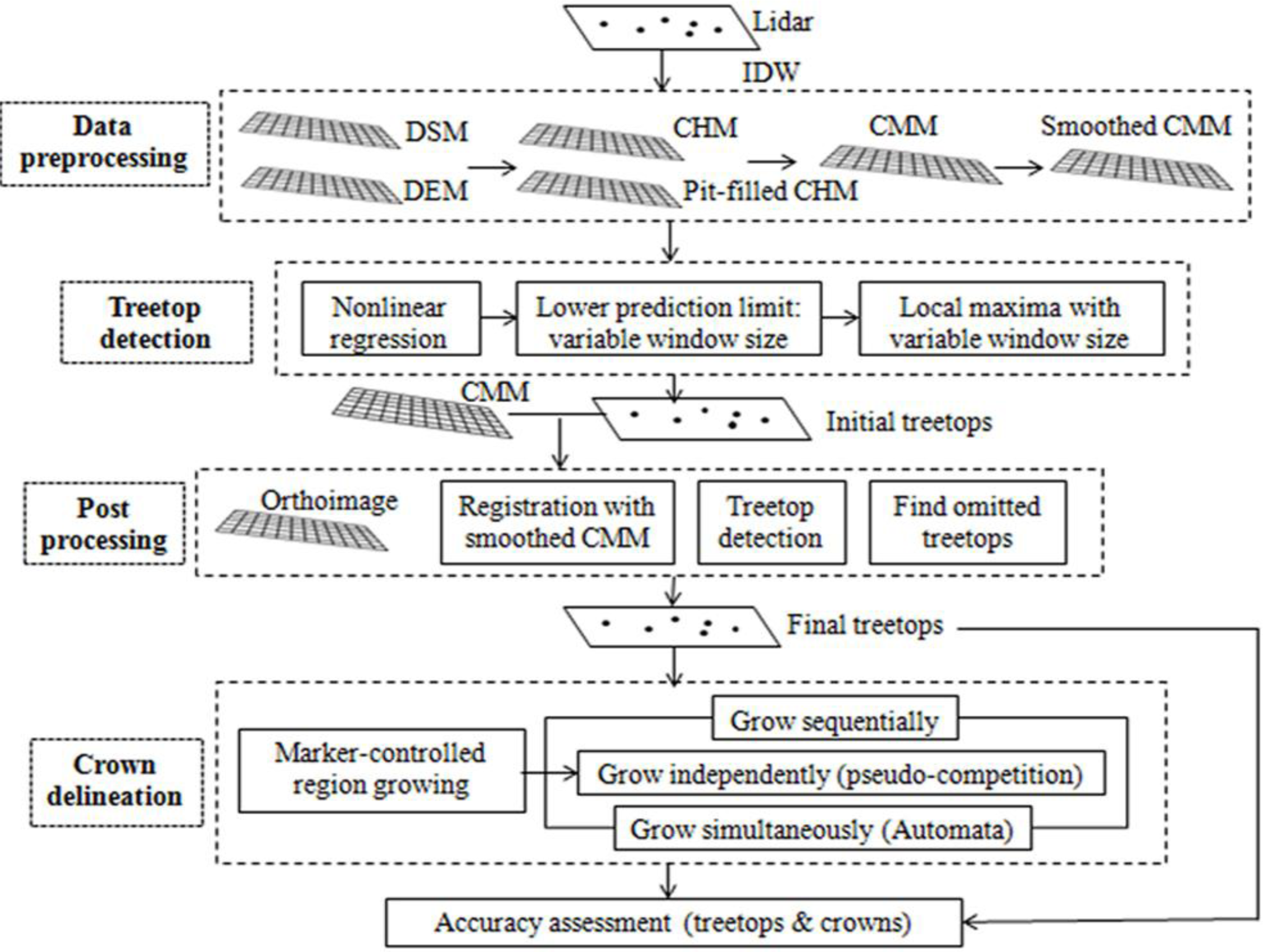
3.1. Overview
3.2. Data Preprocessing
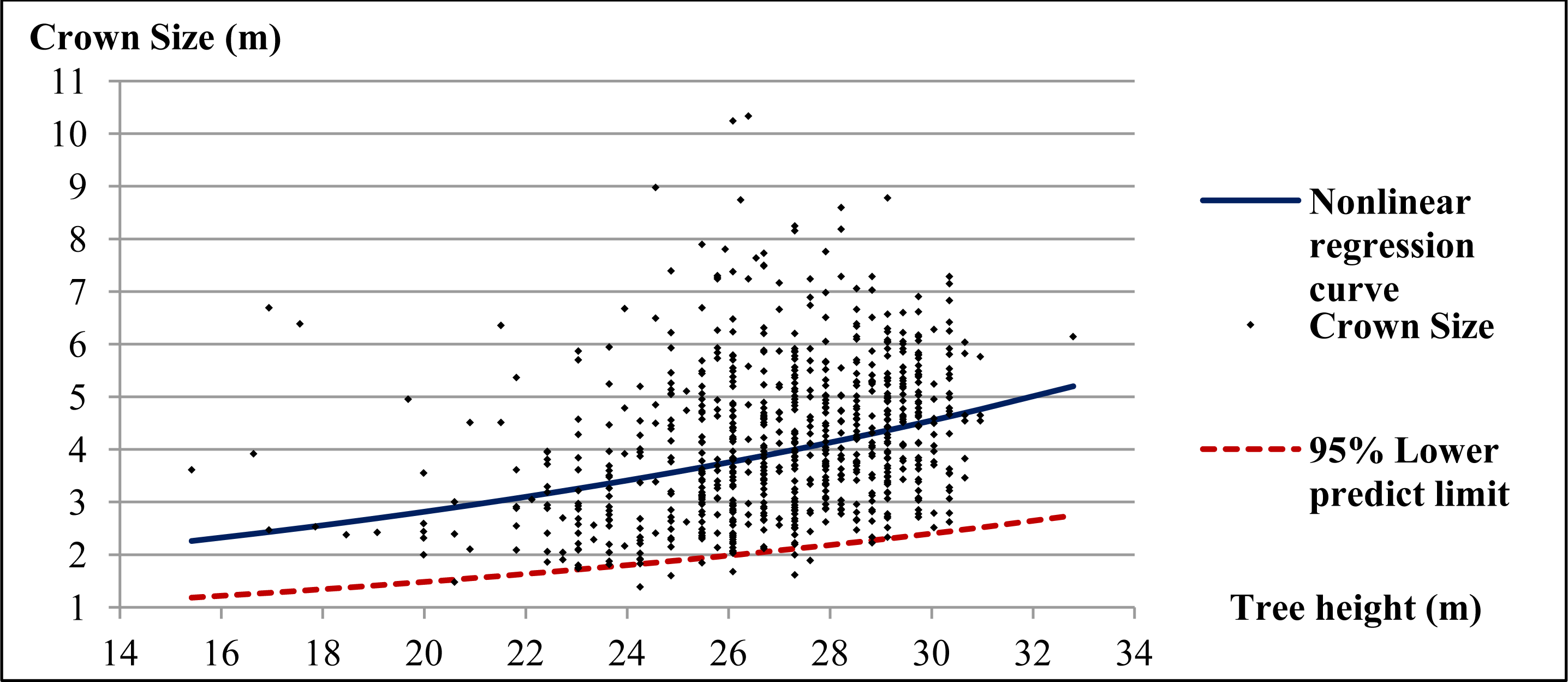
3.3. Treetop Detection
3.4. Post-Processing Using Orthoimagery
3.5. Crown Delineation
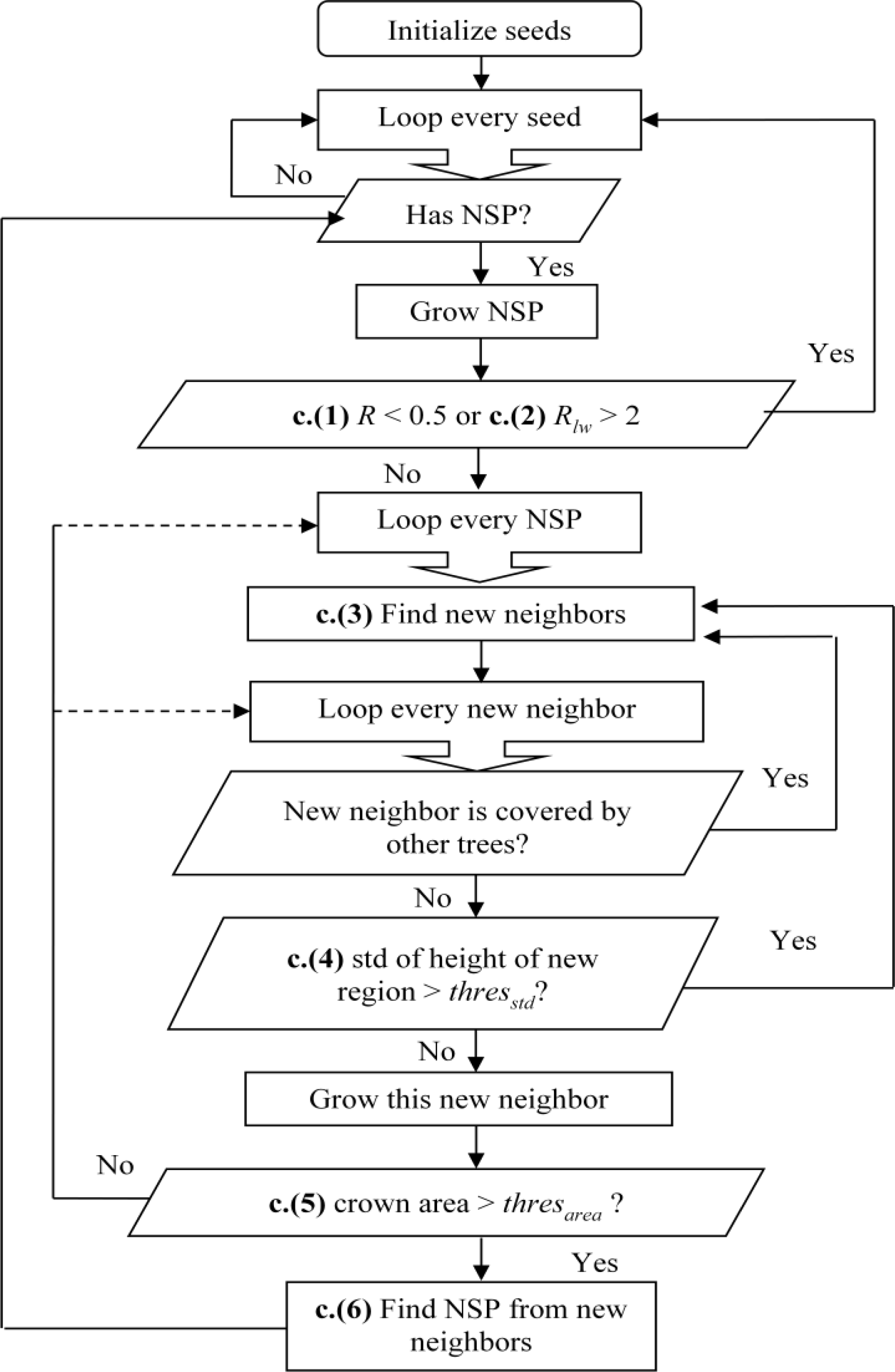
3.5.1. Marker-Controlled Region Growing
Criterion 1: Rectangularity
Criterion 2: Ratio of length and width
Criterion 3: Neighborhood
Criterion 4: Threshold of variability
Criterion 5: Threshold of crown area
Criterion 6: Threshold of height difference
3.5.2. Growth Order in Marker-Controlled Region Growing
3.6. Accuracy Assessment
3.6.1. Accuracy Assessment of Treetop Detection
3.6.2. Accuracy Assessment of Tree Crown Delineation
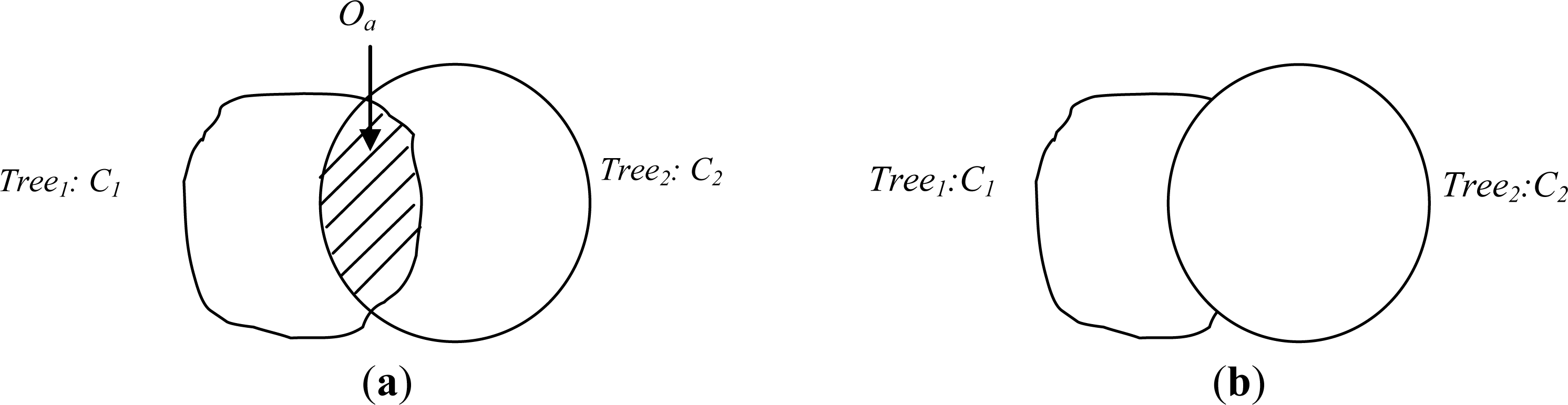
- (a)
- 1:1 match—reference crown only overlaps one delineated crown and the overlap area is greater than 50% of both delineated and reference crowns (Figure 10a);
- (b)
- match but under-grow—reference crown only overlaps one delineated crown and the overlap area is greater than 50% of the delineated crown area but less than 50% of the reference crown area (Figure 10b);
- (c)
- match but over-grow—reference crown only overlaps one delineated crown and the overlap area is greater than 50% of the reference crown area but less than 50% of the delineated crown area (Figure 10c);
- (d)
- mis-located match—reference crown only overlaps one delineated crown but overlap area is between 0 and 50% of both delineated and reference crown area (Figure 10d);
- (e)
- split/multiple match—reference tree is split into multiple delineated trees and at least two delineated trees have overlap area greater than 50% of the delineated crowns (Figure 10e);
- (f)
- merge—delineated tree merges multiple reference trees and at least two reference trees have overlap area greater than 50% of the reference crowns (Figure 10f);
- (g)
- multi-intersected—reference tree is intersected by multiple delineated trees and at least one delineated tree has overlap area between 0 and 50% of delineated trees (Figure 10g);
- (h)
- commission error—delineated tree does not intersect any reference trees (Figure 10h);
- (i)
- omission error—reference tree does not intersect any delineated trees (Figure 10i).
4. Results
4.1. Impact of Combining ALS Data and Orthoimagery on Treetop Detection
4.2. The Impact of Growth Order on the Accuracy of Tree Crown Delineation
5. Discussion
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Hyyppä, J.; Hyyppä, H.; Inkinen, M.; Engdahl, M.; Linko, S.; Zhu, Y.H. Accuracy comparison of various remote sensing data sources in the retrieval of forest stand attributes. For. Ecol. Manag 2000, 128, 109–120. [Google Scholar]
- Erikson, M. Segmentation of individual tree crowns in colour aerial photographs using region growing supported by fuzzy rules. Can. J. For. Res 2003, 33, 1557–1563. [Google Scholar]
- Wolf, B.; Heipke, C. Automatic extraction and delineation of single trees from remote sensing data. Mach. Vis. Appl 2007, 18, 317–330. [Google Scholar]
- Holmgren, J.; Persson, A. Identifying species of individual trees using airborne laser scanner. Remote Sens. Environ 2004, 90, 415–423. [Google Scholar]
- Leckie, D.; Gougeon, F.; Hill, D.; Quinn, R.; Armstrong, L.; Shreenan, R. Combined high-density lidar and multispectral imagery for individual tree crown analysis. Can. J. Remote Sens 2003, 29, 1–17. [Google Scholar]
- Popescu, S.C.; Wynne, R.H. Seeing the trees in the forest: Using Lidar and multispectral data fusion with local filtering and variable window size for estimating tree height. Photogramm. Eng. Remote Sens 2004, 70, 589–604. [Google Scholar]
- Heinzel, J.; Koch, B. Investigating multiple data sources for tree species classification in temperate forest and use for single tree delineation. Int. J. Appl. Earth Observ. Geoinf 2012, 18, 101–110. [Google Scholar]
- Zhang, W.; Ke, Y.; Quackenbush, L.J.; Zhang, L. Using error-in-variable regression to predict tree diameter and crown width from remotely sensed imagery. Can. J. For. Res 2010, 40, 1095–1108. [Google Scholar]
- Bai, Y.; Walsworth, N.; Roddan, B.; Hill, D.A.; Broersma, K.; Thompson, D. Quantifying tree cover in the forest-grassland ecotone of British Columbia using crown delineation and pattern detection. For. Ecol. Manag 2005, 212, 92–100. [Google Scholar]
- Harding, D.J.; Lefsky, M.A.; Parker, G.G.; Blair, J.B. Laser altimeter canopy height profiles methods and validation for closed-canopy, broadleaf forests. Remote Sens. Environ 2001, 76, 283–297. [Google Scholar]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenerg 2007, 31, 646–655. [Google Scholar]
- Yu, X.; Hyyppä, J.; Kaartinen, H.; Maltamo, M. Automatic detection of harvested trees and determination of forest growth using airborne laser scanning. Remote Sens. Environ 2004, 90, 451–462. [Google Scholar]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens 2008, 29, 1339–1366. [Google Scholar]
- Hyyppä, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A segmentation-based method to retrieve stem volume estimates from 3D tree height models produced by laser scanners. IEEE Trans. Geosci. Remote Sens 2001, 39, 969–975. [Google Scholar]
- Forzieri, G.; Guarnieri, L.; Vivoni, E.R.; Castelli, F.; Preti, F. Multiple attribute decision making for individual tree detection using high-resolution laser scanning. For. Ecol. Manag 2009, 258, 2501–2510. [Google Scholar]
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery. Remote Sens. Environ 2000, 73, 103–114. [Google Scholar]
- Gleason, C.J.; Im, J. A fusion approach for tree crown delineation from Lidar data. Photogramm. Eng. Remote Sens 2012, 78, 679–692. [Google Scholar]
- Wang, L.; Gong, P.; Biging, G.S. Individual tree-crown delineation and treetop detection in high-spatial-resolution aerial imagery. Photogramm. Eng. Remote Sens 2004, 70, 351–357. [Google Scholar]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating individual trees in a savanna woodland using small footprint Lidar data. Photogramm. Eng. Remote Sens 2006, 72, 923–932. [Google Scholar]
- Culvenor, D.S. TIDA: An algorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery. Computer Geosci 2002, 28, 33–44. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice Hall, Inc: Upper Saddle River, NJ, USA, 2002; pp. 567–642. [Google Scholar]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of individual trees crowns in airborne Lidar data. Photogramm. Eng. Remote Sens 2006, 72, 357–363. [Google Scholar]
- Coops, N.C.; Wulder, M.A.; Culvenor, D.S.; St-Onge, B. Comparison of forest attributes extracted from fine spatial resolution multispectral and lidar data. Can. J. Remote Sens 2004, 30, 855–866. [Google Scholar]
- Hirschmugl, M.; Ofner, M.; Raggam, J.; Schardt, M. Single tree detection in very high resolution remote sensing data. Remote Sens. Environ 2007, 110, 533–544. [Google Scholar]
- Wang, Z.; Jensen, J.R.; Im, J. An automatic region-based segmentation algorithm for remote sensing applications. Environ. Modell. Softw 2010, 25, 1149–1165. [Google Scholar]
- Mehnert, A.; Jackway, P. An improved seeded region growing algorithm. Pattern Recogn. Lett 1997, 18, 1065–1071. [Google Scholar]
- Adams, R.; Bischof, L. Seeded region growing. IEEE Trans. Pattern. Anal. Mach. Intell 1994, 16, 641–647. [Google Scholar]
- Ke, Y.; Quackenbush, L.J. A comparison of three methods for automatic tree crown detection and delineation methods from high spatial resolution imagery. Int. J. Remote Sens 2011, 32, 3625–3647. [Google Scholar]
- Pugh, M.L. Forest Terrain Feature Characterization Using Multi-Sensor Neural Image Fusion and Feature Extraction Methods. State University of New York, New York, NY, USA, 2005. [Google Scholar]
- NYSGIS Clearinghouse. Available online: http://gis.ny.gov/gateway/mg/2006/cortland/ (accessed on 20 January 2012).
- Ke, Y.; Zhang, W.; Quackenbush, L.J. Active contour and hill climbing for tree crown detection and delineation. Photogramm. Eng. Remote Sens 2010, 76, 1169–1181. [Google Scholar]
- Stehman, S.V.; Czaplewski, R.L. Design and analysis for thematic map accuracy assessment: Fundamental principles. Remote Sens. Environ 1998, 64, 331–344. [Google Scholar]
- Ben-Arie, J.R.; Hay, G.J.; Powers, R.P.; Castilla, G.; St-Onge, B. Development of a pit filing algorithm for LiDAR canopy height models. Computers Geosci 2009, 35, 1940–1949. [Google Scholar]
- Dralle, K.; Rudemo, M. Stem number estimation by kernel smoothing of aerial photos. Can. J. For. Res 1996, 26, 1228–1236. [Google Scholar]
- SAS Institute Inc. SAS/STAT 9.3 User’s Guide; SAS Institute Inc: Cary, NC, USA, 2011. [Google Scholar]
- Quackenbush, L.J.; Hopkins, P.F.; Kinn, G.J. Developing forestry products from high resolution digital aerial imagery. Photogramm. Eng. Remote Sens 2000, 66, 1337–1346. [Google Scholar]
- Cohen, W.B.; Spies, T.A.; Bradshaw, G.A. Semivariograms of digital imagery for analysis of conifer canopy structure. Remote Sens. Environ 1990, 34, 167–178. [Google Scholar]
- Song, C.; Woodcock, C.E. Estimating tree crown size from multiresolution remotely sensed imagery. Photogramm. Eng. Remote Sens 2003, 69, 1263–1270. [Google Scholar]
- Popescu, S.C.; Zhao, K. A voxel-based lidar method for estimating crown base height for deciduous and pine trees. Remote Sens. Environ 2008, 112, 767–781. [Google Scholar]
- Benenson, I.; Torrens, P.M. Geosimulation: Automata-Based Modeling of Urban Phenomena; John Wiley & Sons Ltd: England, UK, 2004; pp. 1–19. [Google Scholar]
- Lett, C.; Silber, C.; Barret, N. Comparison of a cellular automata network and an individual-based model for the simulation of forest dynamics. Ecol. Model 1999, 121, 277–293. [Google Scholar]
- Sudhira, H.S.; Ramachandra, T.V.; Wytzisk, A.; Jeganathan, C. Framework for Integration of Agent-Based and Cellular Automata Models for Dynamic Geospatial Simulations; Technical Report: 100; Indian Institute of Science: Banglore, India, 2005. [Google Scholar]
- Gougeon, F.A.; Leckie, D.G. The individual tree crown approach applied to Ikonos images of a coniferous plantation area. Photogramm. Eng. Remote Sens 2006, 72, 1287–1297. [Google Scholar]
- Stehman, S.V.; Foody, G.M. The SAGE Handbook of Remote Sensing; Sage: Thousand Oaks, CA, USA, 2009; p. 297. [Google Scholar]
- Li, Z.; Hayward, R.; Zhang, J.; Liu, Y. Individual Tree Crown Delineation Techniques for Vegetation Management in Power Line Corridor. Proceedings of 2008 Digital Image Computing: Techniques and Applications, Canberra, Australia, 1–3 December 2008; pp. 148–154.
- Zitová, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput 2003, 21, 977–1000. [Google Scholar]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens 2012, 4, 950–974. [Google Scholar]
- Jing, L.; Hu, B.; Noland, T.; Li, J. An individual tree crown delineation method based on multi-scale segmentation of imagery. ISPRS J. Photogramm. Remote Sens 2012, 70, 88–98. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pulse rate | 183.8 kHz |
| FOV | 28 degrees |
| Altitude | 487 m |
| Flying speed | 150 knots |
| Point density | >7 pts/m2 (average: 12.7 pts/m2) |
| Statistics | Minimum | Mean | Median | Maximum | Standard Deviation |
|---|---|---|---|---|---|
| Tree height (m) | 15.4 | 27.0 | 27.3 | 32.8 | 2.4 |
| Average crown size (m) | 1.4 | 4.2 | 4.0 | 10.3 | 1.4 |
| Plot | Accuracy Metrics | ALS | ALS & Green Band | |||||
|---|---|---|---|---|---|---|---|---|
| Percentile | ||||||||
| 50th | 55th | 60th | 65th | 70th | 75th | |||
| 1 | DP | 80.2% | 99.8% | 96.4% | 93.2% | 88.3% | 85.5% | 82.8% |
| N1:1 | 341 | 378 | 378 | 376 | 366 | 363 | 352 | |
| Nd | 377 | 469 | 453 | 438 | 415 | 402 | 389 | |
| Nr | 470 | 470 | 470 | 470 | 470 | 470 | 470 | |
| UA | 90.5% | 80.6% | 83.4% | 85.8% | 88.2% | 90.3% | 90.5% | |
| PA | 72.6% | 80.4% | 80.4% | 80.0% | 77.9% | 77.2% | 74.9% | |
| 2 | DP | 86.7% | 103.1% | 97.6% | 93.9% | 90.2% | 88.6% | 88.1% |
| N1:1 | 703 | 723 | 720 | 718 | 715 | 715 | 713 | |
| Nd | 744 | 885 | 837 | 806 | 774 | 760 | 756 | |
| Nr | 858 | 858 | 858 | 858 | 858 | 858 | 858 | |
| UA | 94.5% | 81.7% | 86.0% | 89.1% | 92.4% | 94.1% | 94.3% | |
| PA | 81.9% | 84.3% | 83.9% | 83.7% | 83.3% | 83.3% | 83.1% | |
| Plot | Accuracy Metrics/Cases Analysis | G_seq | G_ind | G_sim |
|---|---|---|---|---|
| 1 | RE_CA | 3.8% | 1.6% | 1.3% |
| PA | 60.6% | 61.5% | 62.6% | |
| UA | 70.9% | 71.9% | 73.1% | |
| 1:1 match | 285 | 289 | 294 | |
| Match but under-grow | 14 | 11 | 13 | |
| Match but over-grow | 78 | 80 | 75 | |
| Mis-located match | 13 | 10 | 8 | |
| Split/multiple match | 0 | 0 | 0 | |
| Merge | 29 | 28 | 29 | |
| Multi-intersected | 14 | 14 | 13 | |
| Commission error | 10 | 10 | 10 | |
| Omission error | 37 | 38 | 38 | |
| No. of Reference Crowns | 470 | |||
| 2 | RE_CA | −9.0% | −10.2% | −11.1% |
| PA | 81.1% | 82.5% | 82.1% | |
| UA | 91.6% | 93.2% | 92.6% | |
| 1:1 match | 696 | 708 | 704 | |
| Match but under-grow | 13 | 9 | 11 | |
| Match but over-grow | 20 | 15 | 17 | |
| Mis-located match | 3 | 4 | 4 | |
| Split/multiple match | 5 | 5 | 5 | |
| Merge | 28 | 30 | 31 | |
| Multi-intersected | 13 | 7 | 5 | |
| Commission error | 12 | 12 | 12 | |
| Omission error | 80 | 80 | 81 | |
| No. of Reference Crowns | 858 | |||
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zhen, Z.; Quackenbush, L.J.; Zhang, L. Impact of Tree-Oriented Growth Order in Marker-Controlled Region Growing for Individual Tree Crown Delineation Using Airborne Laser Scanner (ALS) Data. Remote Sens. 2014, 6, 555-579. https://doi.org/10.3390/rs6010555
Zhen Z, Quackenbush LJ, Zhang L. Impact of Tree-Oriented Growth Order in Marker-Controlled Region Growing for Individual Tree Crown Delineation Using Airborne Laser Scanner (ALS) Data. Remote Sensing. 2014; 6(1):555-579. https://doi.org/10.3390/rs6010555
Chicago/Turabian StyleZhen, Zhen, Lindi J. Quackenbush, and Lianjun Zhang. 2014. "Impact of Tree-Oriented Growth Order in Marker-Controlled Region Growing for Individual Tree Crown Delineation Using Airborne Laser Scanner (ALS) Data" Remote Sensing 6, no. 1: 555-579. https://doi.org/10.3390/rs6010555
APA StyleZhen, Z., Quackenbush, L. J., & Zhang, L. (2014). Impact of Tree-Oriented Growth Order in Marker-Controlled Region Growing for Individual Tree Crown Delineation Using Airborne Laser Scanner (ALS) Data. Remote Sensing, 6(1), 555-579. https://doi.org/10.3390/rs6010555