1. Introduction
Landsat-8 was launched on 11 February 2013 with two Earth imaging sensors on-board: The Operational Land Imager (OLI) that will be discussed in this paper and the Thermal Infrared Sensor (TIRS). The OLI, built and tested by Ball Aerospace & Technologies Corp ((BATC), Boulder, CO, USA), images the Earth in 9 spectral bands as described in [
1]. The primary characteristics of the OLI instrument relevant to this paper are presented in
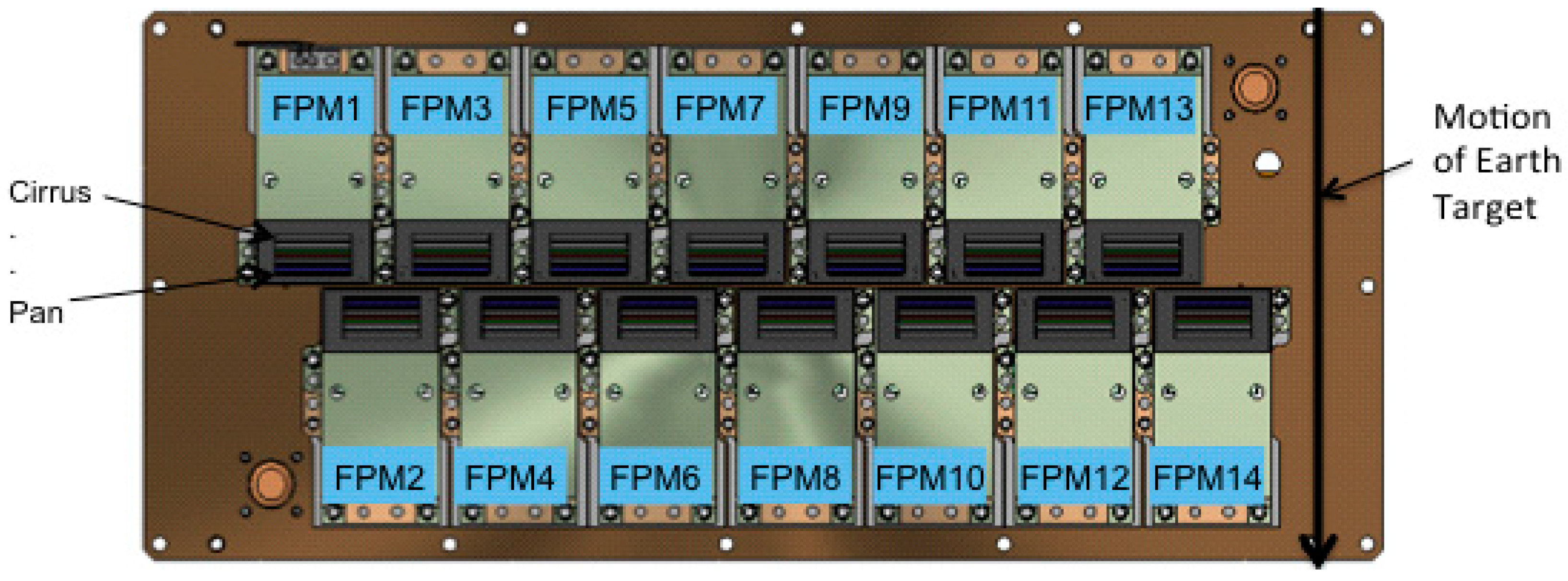
Table 1. Throughout the paper the spectral bands will be referred to by their band number, name or center wavelength. It is important to note that unlike previous whiskbroom Landsat instruments, which have less than 150 detectors, the OLI is a pushbroom radiometer and, as such, has over 69,000 detectors covering the nine spectral bands. These detectors are arranged in the focal plane in 14 staggered Focal Plane Modules (FPMs),
Figure 1. The number and location of the detectors has implications for the OLI radiometric calibration.
Table 1.
The Operational Land Imager (OLI) Salient Characteristics.
Table 1.
The Operational Land Imager (OLI) Salient Characteristics.
| Band (#) | Band Name | Center Wavelength (nm) | Bandwidth (nm) | IFOV (m) | Active Detectors (#) |
|---|
| 1 | Coastal-Aerosol (CA) | 443 | 16 | 30 | 6916 (14 × 494) |
| 2 | Blue | 482 | 60 | 30 | 6916 |
| 3 | Green | 561 | 57 | 30 | 6916 |
| 4 | Red | 655 | 38 | 30 | 6916 |
| 5 | Near-IR (NIR) | 865 | 28 | 30 | 6916 |
| 6 | Short Wave IR-1 (SWIR 1) | 1609 | 85 | 30 | 6916 |
| 7 | SWIR 2 | 2201 | 187 | 30 | 6916 |
| 8 | Panchromatic (Pan) | 590 | 172 | 15 | 13,832 (14 × 988) |
| 9 | Cirrus | 1373 | 20 | 30 | 6916 |
Key among the considerations in the design, build, test and operation of the OLI and the Landsat-8 system is providing data to the user community that is well understood and accurately referenced to standards of radiance (±5%, 1 sigma or k = 1) and reflectance (±3%, k = 1). These accuracies are achieved with a combination of factors including: (1) precision temperature control for the focal plane and focal plane electronics; (2) state of the art contamination control for all the optical surfaces, including the solar diffusers; (3) rigorous maintenance and validation of the radiance and reflectance scales as transferred from the national laboratories to the instrument and calibration devices; (4) a precisely maneuverable spacecraft to allow calibration using the sun and moon; (5) a concept of operations that includes calibration observations on per-orbit, daily, weekly, quarterly and semiannual intervals, depending on the calibration type; and (6) an image assessment system to track the on-orbit performance of the system.
Figure 1.
OLI focal plane showing 14 Focal Plane Modules (FPMs) and individual band spectral filters in their butcher-block assemblies.
Figure 1.
OLI focal plane showing 14 Focal Plane Modules (FPMs) and individual band spectral filters in their butcher-block assemblies.
In this paper we will review the calibration features built into the OLI instrument, summarize the pre-launch radiometric characterization and calibration of the instrument and then discuss its on-orbit performance in terms of radiometric stability across the mission to date. Comparisons to ground reference measurements and other satellites will be mentioned, but are discussed in more detail in other papers [
2,
3]. Aspects of the material included in this paper have been presented at a number of conferences [
4,
5,
6,
7,
8,
9,
10,
11].
4. OLI Pre-Launch Reflectance Calibrator Characterization
As described above, the OLI calibration subassembly houses two Spectralon solar diffusers. Prior to launch, the bidirectional reflectance properties of these diffusers were characterized across the range of OLI detector view angles for the 45° solar incidence angle at which they are illuminated on-orbit [
9]. The reference standard for this characterization was a Spectralon diffuser (25 × 25 cm) that had been measured at the NIST Spectral Tri-function Automated Reflectance Reflectometer (STARR) facility [
5]. Bidirectional Reflectance Factors (BRFs) of this standard were measured for the 0° illumination/45° view angle condition, from 400 to 2500 nm at 25 nm intervals; 45° illumination/−45° view angle condition from 400 to 1100 nm at 25 nm intervals, plus 1375 nm, 1610 nm and 2200 nm; and 45° illumination/−37.5° to −52.5° every 7.5° view angle conditions at 665 nm and 1610 nm. The NIST stated uncertainty for these measurements from 400 to 2300 nm was ~0.33% (
k = 1) [
5].
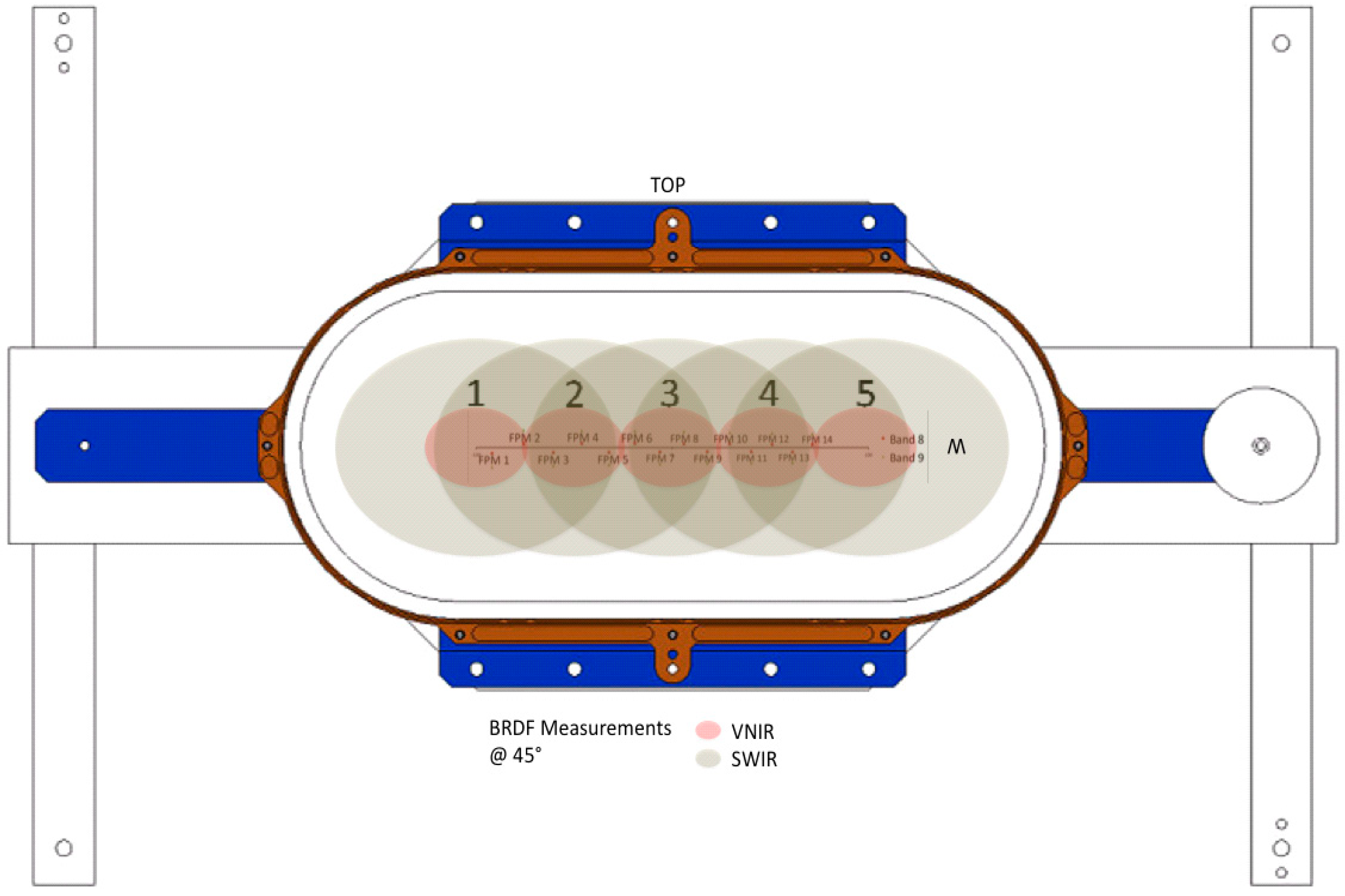
Figure 15.
OLI diffuser in holder for reflectance measurement. The five measurement locations and approximate fields-of-view of the radiometer are shown in relation to the centers of fields of view of the OLI detectors on the FPMs 1–14.
Figure 15.
OLI diffuser in holder for reflectance measurement. The five measurement locations and approximate fields-of-view of the radiometer are shown in relation to the centers of fields of view of the OLI detectors on the FPMs 1–14.
The flight diffuser characterization was performed at the University of Arizona’s College of Optical Sciences Remote Sensing Group goniometric laboratory [
9]. The BRFs were measured at five locations on the diffuser (
Figure 15) that cover the range of area viewed by the OLI detectors. OLI spectral filter witness samples were used to define the spectral bandpasses. Wavelengths below 1000 nm were measured with the UA VNIR radiometer; those above 1000 nm with the UA SWIR radiometer [
17,
18]. At the five locations measurements were taken with 45° illumination and −37.5° to −52.5° every 7.5° in view angle, at 0° and ±2° out of plane. The fields of view of the two radiometers were different; the approximate fields of view for the −45° view condition are shown in
Figure 15. The estimated uncertainty in the measurements varies from 1.1% at 630 nm to 1.9% at 2200 nm (
k = 1). Sample results at three wavelengths are presented in
Figure 16 (working diffuser) and
Figure 17 (pristine diffuser).
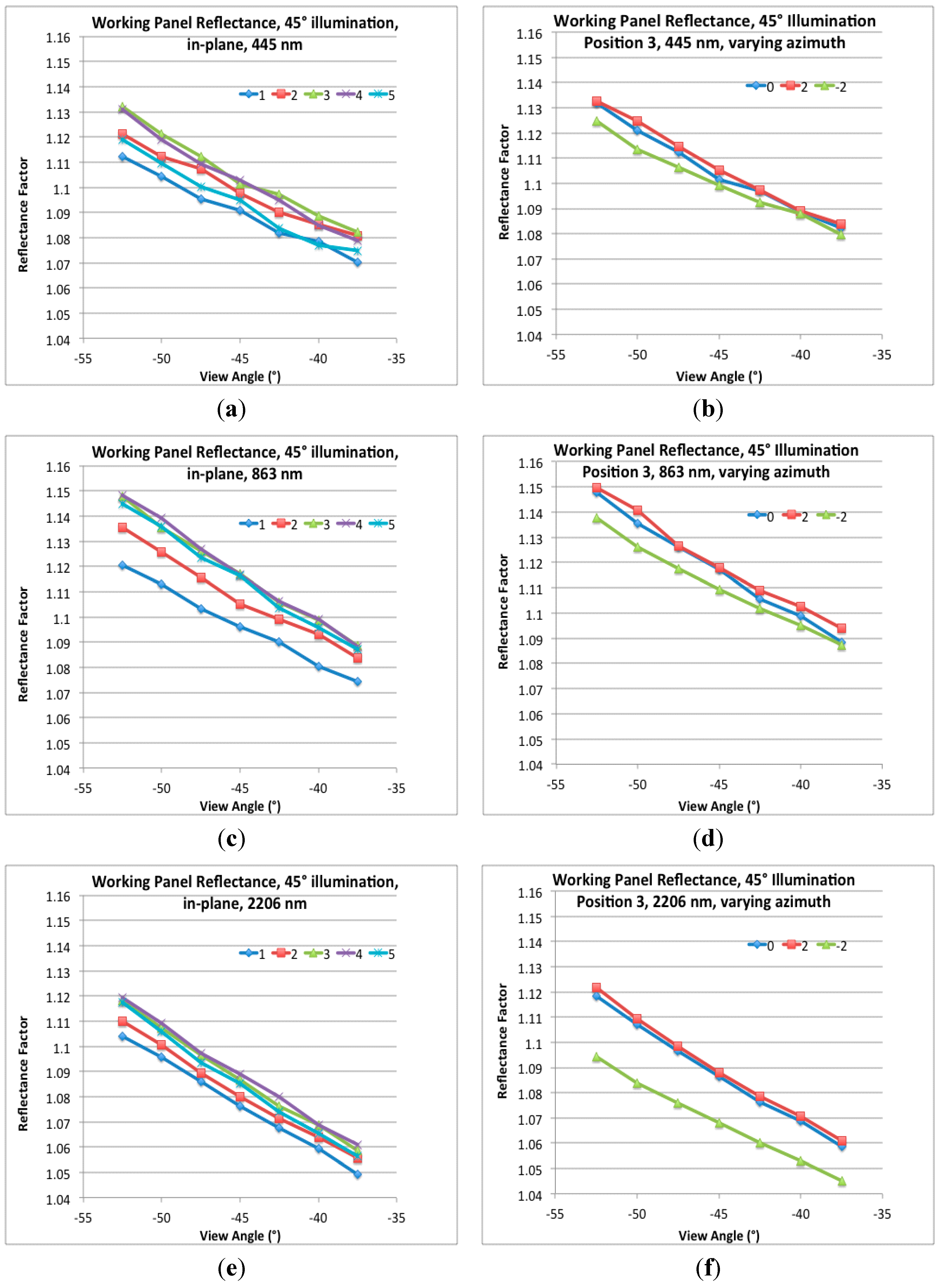
Figure 16.
OLI working diffuser Bidirectional Reflectance Factors: Row 1: (a) In-plane, 445 nm, all positions; (b) Varying azimuths, 445 nm, position 3; Row 2: (c) In-plane, 863 nm, all positions; (d) Varying azimuths, 863 nm, position 3; Row 3: (e) In-plane, 2206 nm, all positions; (f) Varying azimuths, 2206 nm, position 3.
Figure 16.
OLI working diffuser Bidirectional Reflectance Factors: Row 1: (a) In-plane, 445 nm, all positions; (b) Varying azimuths, 445 nm, position 3; Row 2: (c) In-plane, 863 nm, all positions; (d) Varying azimuths, 863 nm, position 3; Row 3: (e) In-plane, 2206 nm, all positions; (f) Varying azimuths, 2206 nm, position 3.
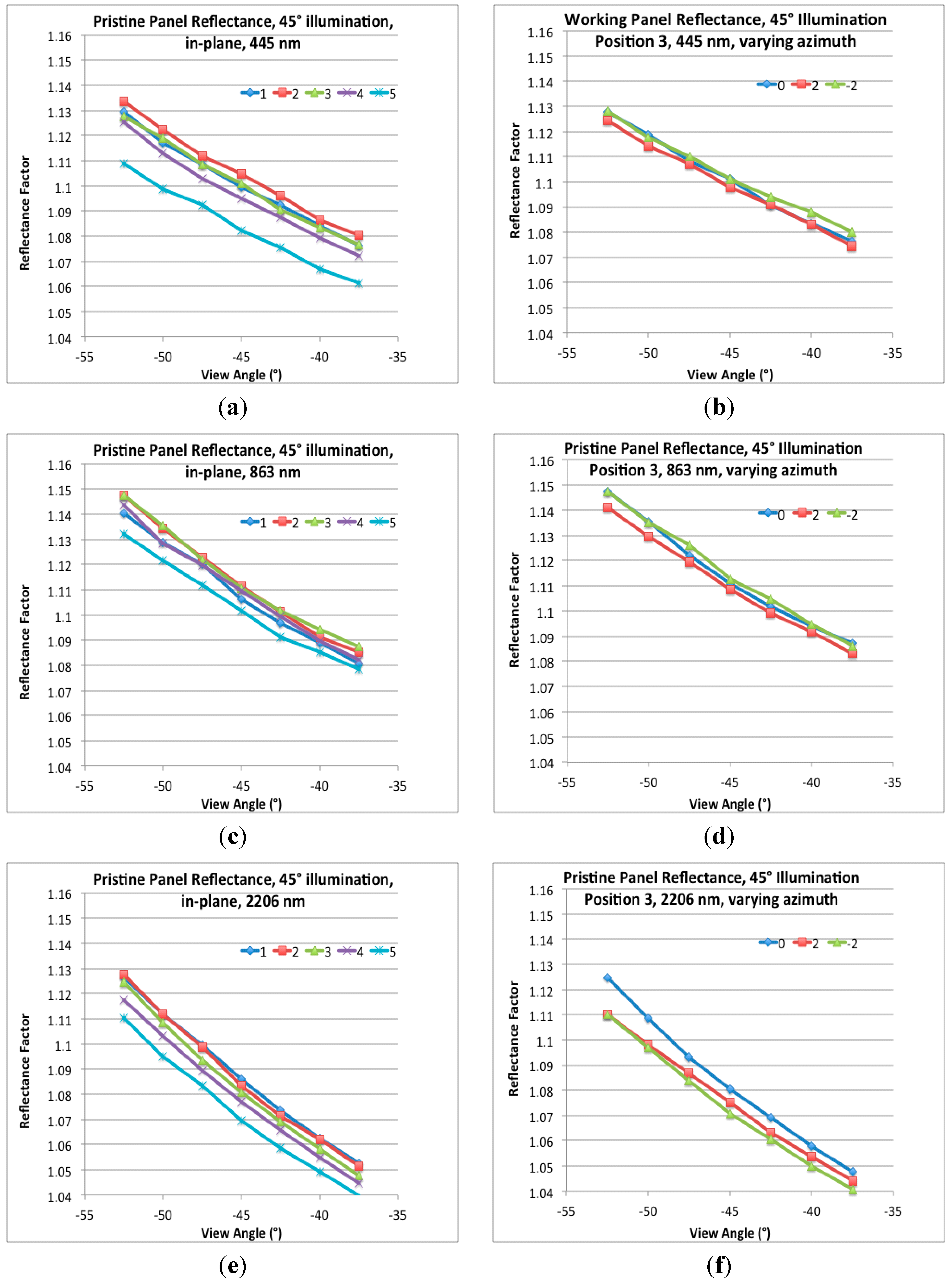
Figure 17.
OLI pristine diffuser Bidirectional Reflectance Factors: Row 1: (a) In-plane 445 nm, all positions (b) Varying azimuths, 445 nm, position 3; Row 2: (c) In-plane, 863 nm, all positions; (d) Varying azimuths, 863 nm, position 3; Row 3: (e) In-plane, 2206 nm, all positions; (f) Varying azimuths, 2206 nm, position 3.
Figure 17.
OLI pristine diffuser Bidirectional Reflectance Factors: Row 1: (a) In-plane 445 nm, all positions (b) Varying azimuths, 445 nm, position 3; Row 2: (c) In-plane, 863 nm, all positions; (d) Varying azimuths, 863 nm, position 3; Row 3: (e) In-plane, 2206 nm, all positions; (f) Varying azimuths, 2206 nm, position 3.
The two panels are similar in their reflectance properties, with all five locations on each panel within an envelope of ±1% reflectance. The slopes of the two panels with view angle are also similar, changing about 5%–7% in reflectance from −37.5 to −52.5°. A few differences worth noting: (1) location 1 on the working panel is on the low side in terms of reflectance relative to the rest of the locations, whereas it is location 5 on the pristine panel that is the lowest; (2) there appears to be an asymmetry around the principal plane in the working panel that is less evident in the pristine panel and (3) the view angle dependence is larger in the pristine panel at 2206 nm, changing by about 8% versus 6% for the working panel.
Figure 18.
BATC heliostat test facility.
Figure 18.
BATC heliostat test facility.
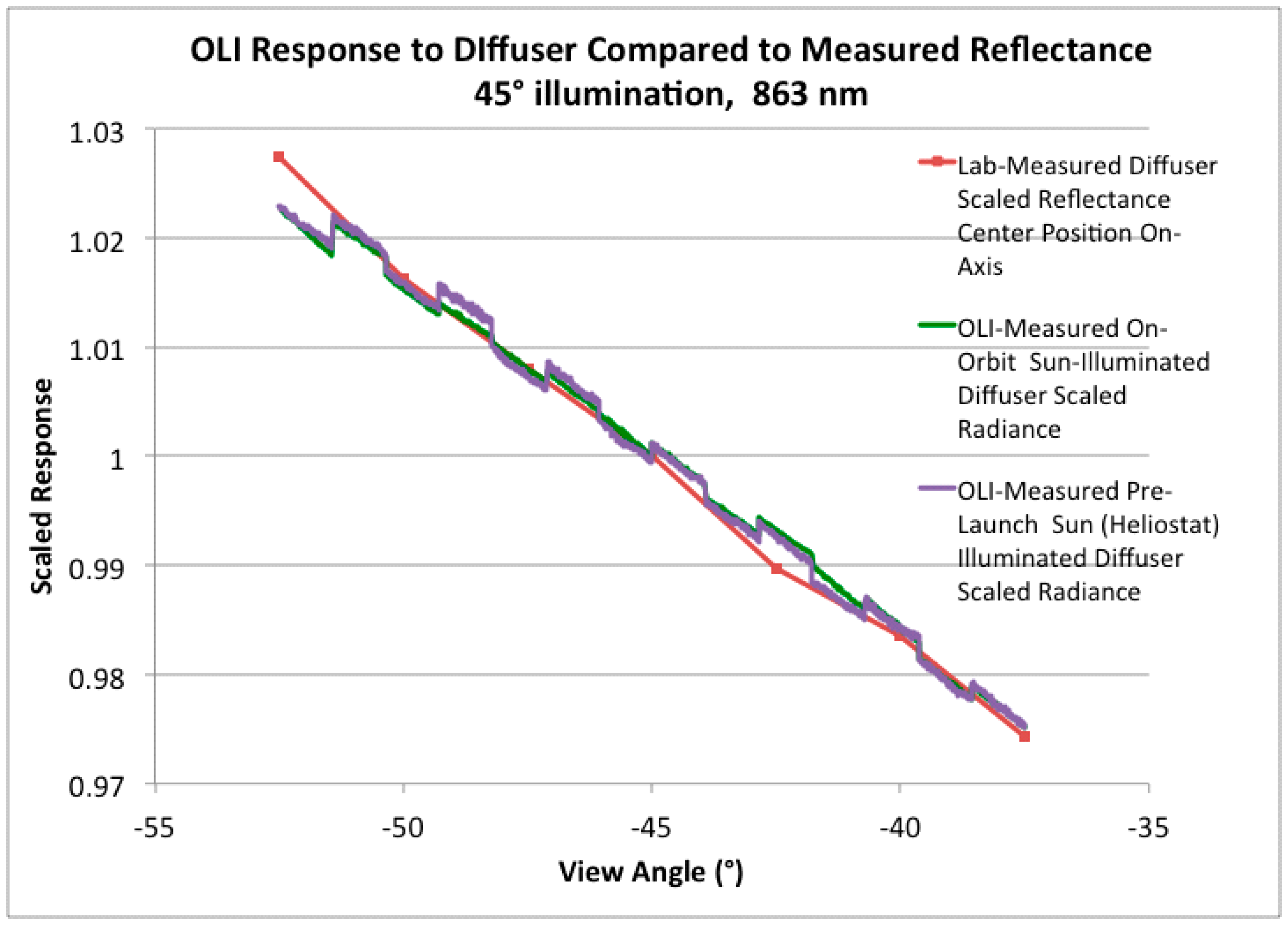
Figure 19.
Comparison of Diffuser Reflectance to OLI Response to Diffuser.
Figure 19.
Comparison of Diffuser Reflectance to OLI Response to Diffuser.
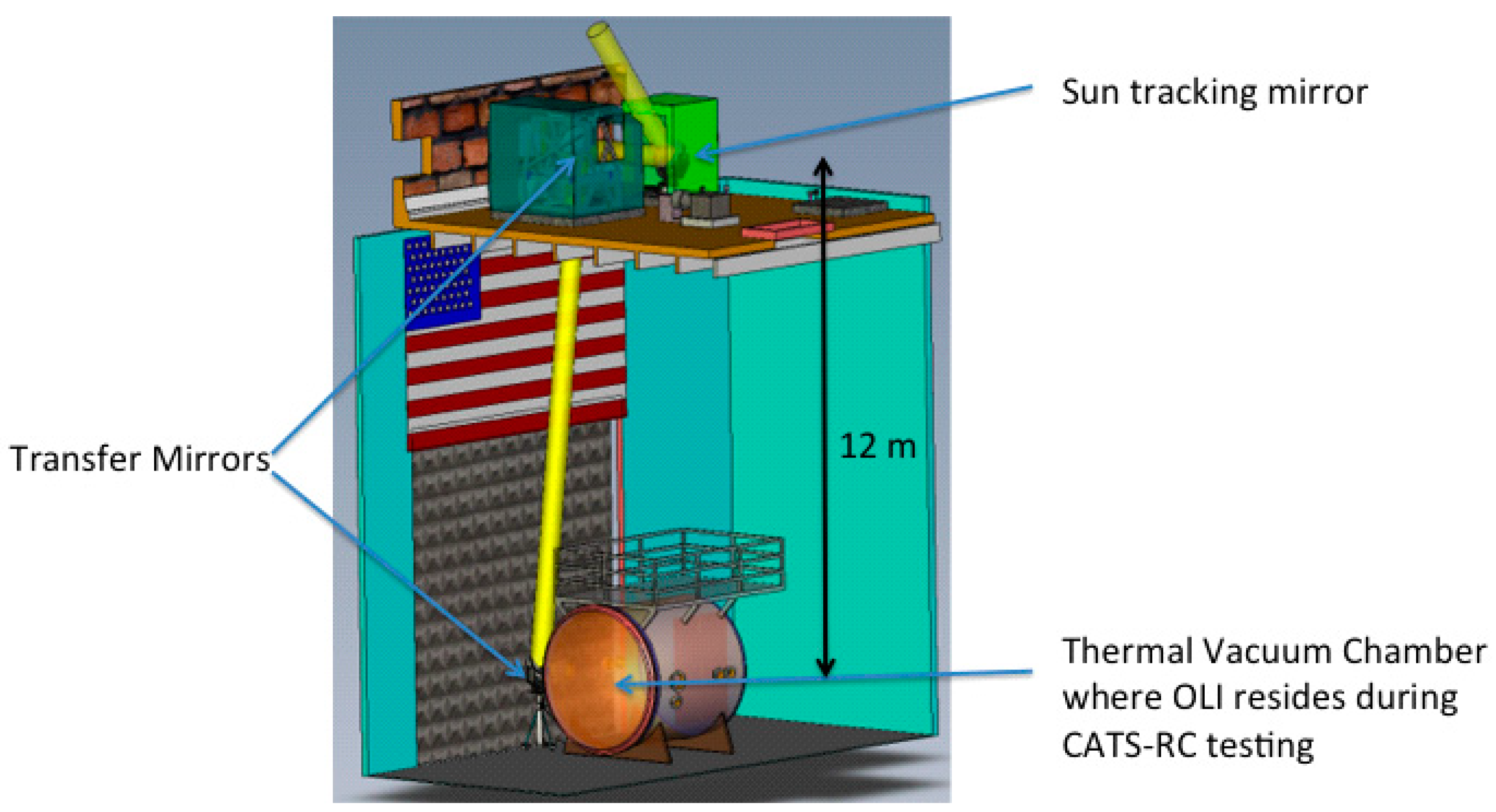
In addition to the component level measurements of the diffuser reflectance factors, the installed OLI diffusers were illuminated by the sun (via a heliostat-
Figure 18) and viewed by the OLI instrument, as they would be on-orbit. The OLI was under thermal vacuum conditions for this testing. As a check on the uniformity of the heliostat and the diffuser and the cross track consistency of the OLI radiometric calibration, the shape of the OLI measured radiance (based on the DSS-based calibration) of the sunlight reflected off the diffuser panel is compared to the measured reflectance of the panel at the panel center position (
Figure 19). Note that the odd and even FPMs view the diffuser panel on opposite sides of the principal plane of the sun and diffuser normal, leading to small discontinuities in response at the FPM boundaries. Also, as shown in
Figure 15, each FPM views a somewhat different portion of the diffuser panel, which can also lead to some of the differences shown in the plots. Overall, note that the internal consistency of the measurements is within ±0.5% across the full field of view.
5. OLI Transfer to Orbit Experiment
The heliostat measurements described above were primarily acquired as part of a “transfer-to-orbit” experiment to assess the stability of the OLI instrument through the launch and early-on-orbit transition. The tenets behind this experiment were:
- (1)
The OLI diffusers would be the most stable artifact through the launch and early-on-orbit period (as opposed to the lamps or the OLI itself)
- (2)
The OLI response to the diffusers could be measured both prior to launch and on-orbit using the same illumination source (namely the sun).
- (3)
The transmission losses in the atmosphere and heliostat could be sufficiently quantified for all but the cirrus band to allow the pre-launch test to be corrected to post launch conditions with an uncertainty of a few percent or less.
The ground portion of the testing occurred while the OLI was under thermal vacuum conditions in the CATS test set up. On two days with clear atmospheric conditions, the heliostat was activated, bringing sunlight from the roof into a side port of the thermal vacuum chamber (
Figure 18). A solar radiometer tracked the sun and measured the atmospheric transmittance during the test. On each day the working and pristine diffusers were alternatingly deployed and OLI data were acquired while the clear sky conditions persisted. The heliostat transmittance was measured before and after this testing using a spectrometer that measured the beam radiance off of a diffuser before and after transiting the heliostat [
23,
24].
The on-orbit radiances of the diffuser (
) were predicted as:
where:
Lband, helio is the OLI measured radiance of the diffuser illuminated via the heliostat using OLI’s
DSS-based calibration
Tband, helio is the measured transmittance of heliostat
Tband, atm is the transmittance of the atmosphere at the time of the heliostat measurement.
DE − S, helio is the Earth-Sun distance at the time of the heliostat observation
DE − S, orbit is the Earth-Sun distance at the time of the on-orbit observation.
T
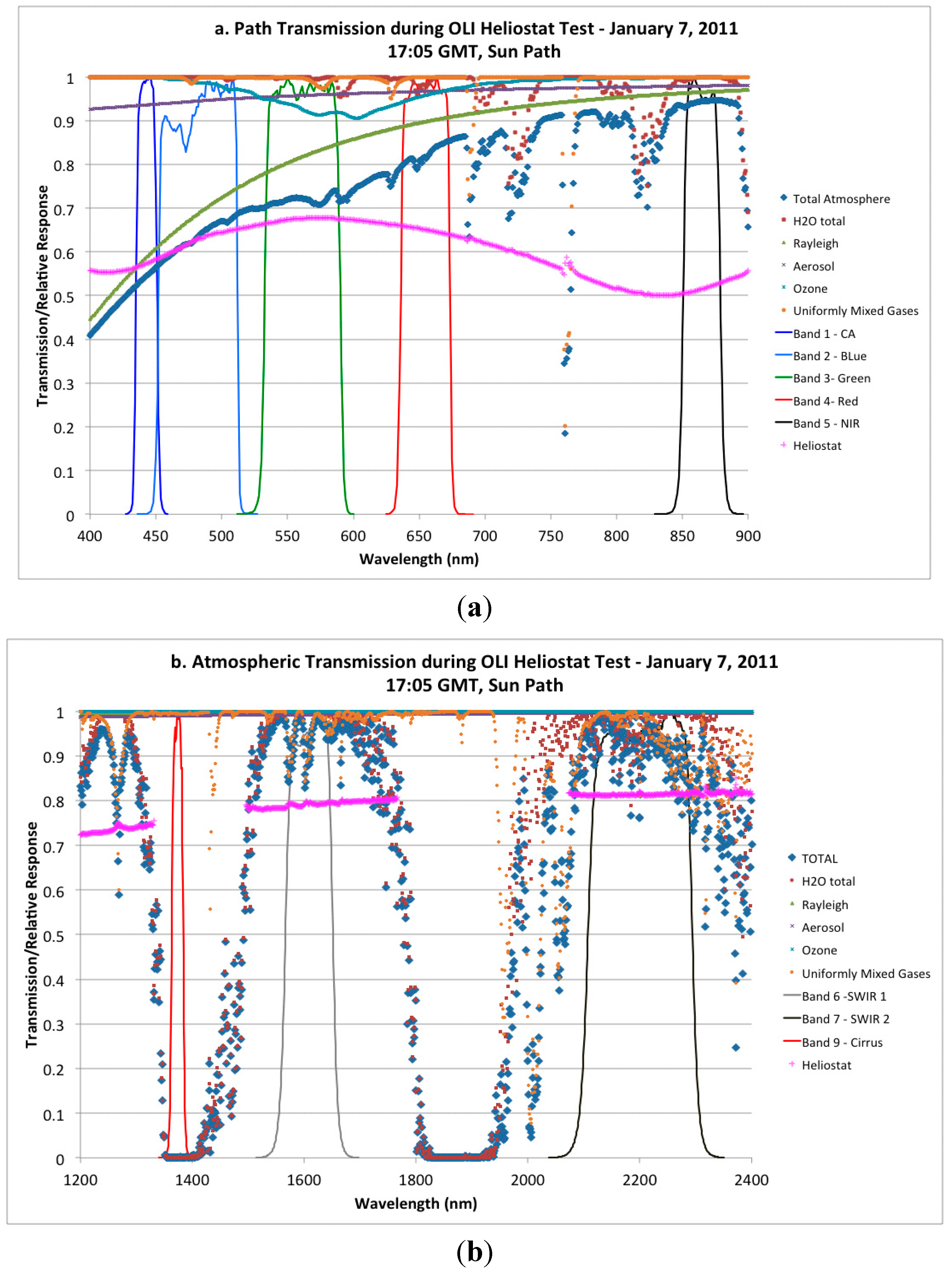
band, atm was calculated using MODTRAN [
25] based on the atmospheric pressure (T
rayleigh), the solar radiometer measurements (T
aerosol) and atmospheric gaseous abundances (T
gases).
Water vapor abundances were determined from the solar radiometer measurement and the ozone abundance came from OMI data [
26]. Other gaseous abundances were based on values built into MODTRAN. The transmittances determined for one of the heliostat tests are shown in
Figure 20 in relation to the OLI bandpasses.
Figure 20.
Atmospheric and heliostat transmissions used to correct OLI transfer to orbit data to top of atmosphere values. (a) VNIR; (b) SWIR.
Figure 20.
Atmospheric and heliostat transmissions used to correct OLI transfer to orbit data to top of atmosphere values. (a) VNIR; (b) SWIR.
The estimated uncertainty in the heliostat transmittance, based on multiple measurements with different techniques was ~1.5% (k = 1); for the atmospheric transmittance ~2% (k = 1); for a total estimated uncertainty in transmittance of ~2.5% (k = 1). The OLI data were bias corrected by subtracting the nearest shutter collect values, linearized and converted to radiance using the pre-launch radiance calibration coefficients. These radiances were converted to the predicted on-orbit radiances by dividing by the heliostat and atmospheric transmittances. Each collect on 7 January 2011, the better of the two days acquired was analyzed separately (four working collects and four pristine collects).
Once launched and after instrument activation, bench dry-out and cool down to operational temperatures, the on-orbit portion of the transfer to orbit experiment was completed. A working solar diffuser collect and a pristine solar diffuser collect were both performed on 18 March 2013 (mission day 35) and this was repeated on 28 March 2013 (mission day 45). These data were converted to radiance,
Lobs, using the same procedure and coefficients as the pre-launch heliostat data. The results are shown in
Table 2.
A second method for evaluating the stability of the OLI responsivity in the transition from on-Earth to in-orbit comes from the stim lamps and their built-in radiance monitor. The OLI stim lamps are tungsten halogen lamps and are operated in a constant current mode. It has been widely observed [
27], that this type of lamp, operated in this manner, will burn significantly warmer and therefore brighter in a “zero gravity” state. The conventional wisdom is that this is due to the lack of convectional cooling of the filament in a zero gravity environment. In addition to the hotter temperature, the zero gravity environment would be expected to change the filament shape.
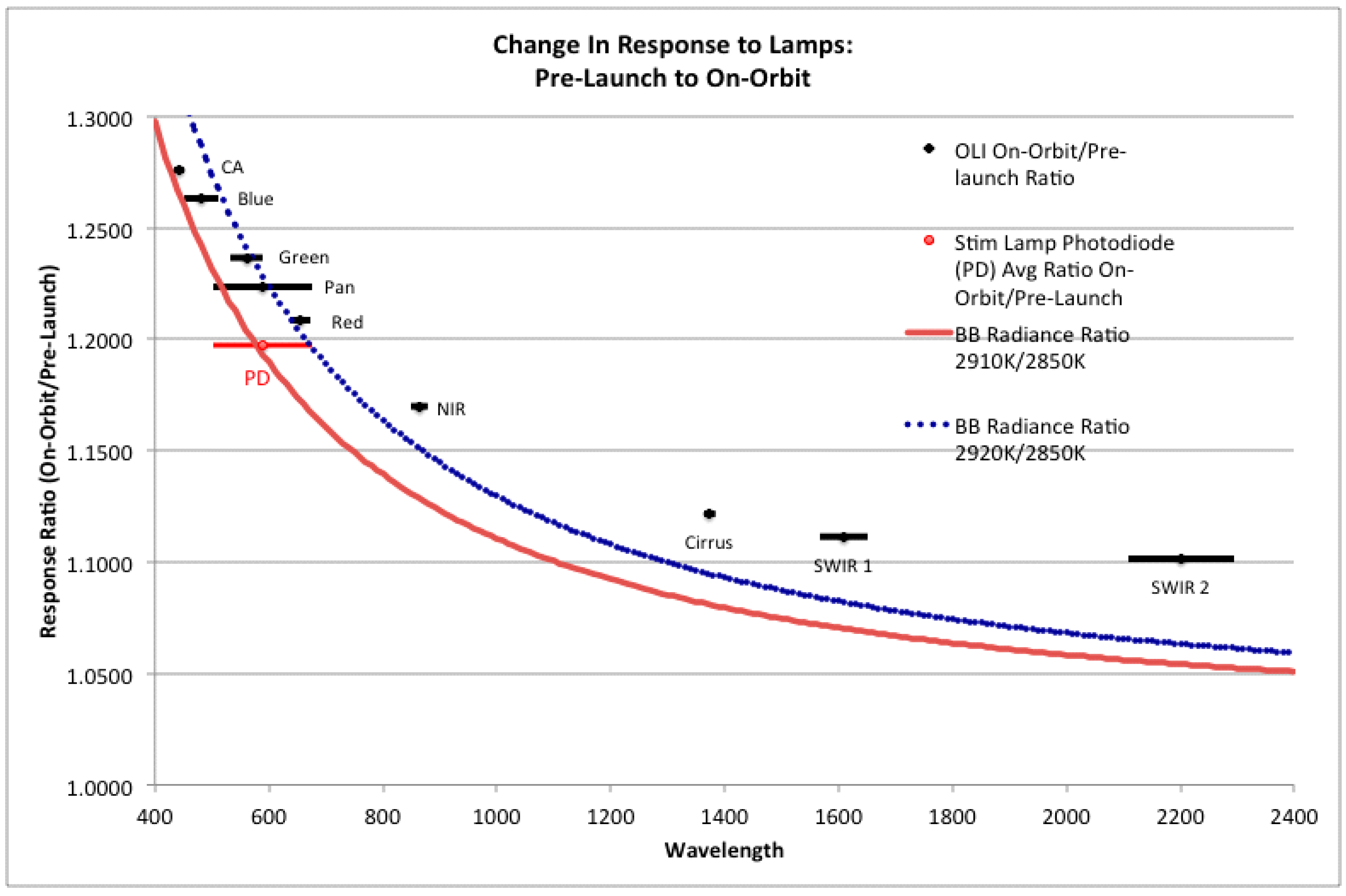
Figure 21.
OLI and stim lamp photodiode monitor changes in response to stim lamps. Horizontal bars indicate the bandpasses. Blackbody temperature shifts matching the panchromatic band observed change (blue) and the photodiode observed change (red) are shown for reference.
Figure 21.
OLI and stim lamp photodiode monitor changes in response to stim lamps. Horizontal bars indicate the bandpasses. Blackbody temperature shifts matching the panchromatic band observed change (blue) and the photodiode observed change (red) are shown for reference.
As shown in
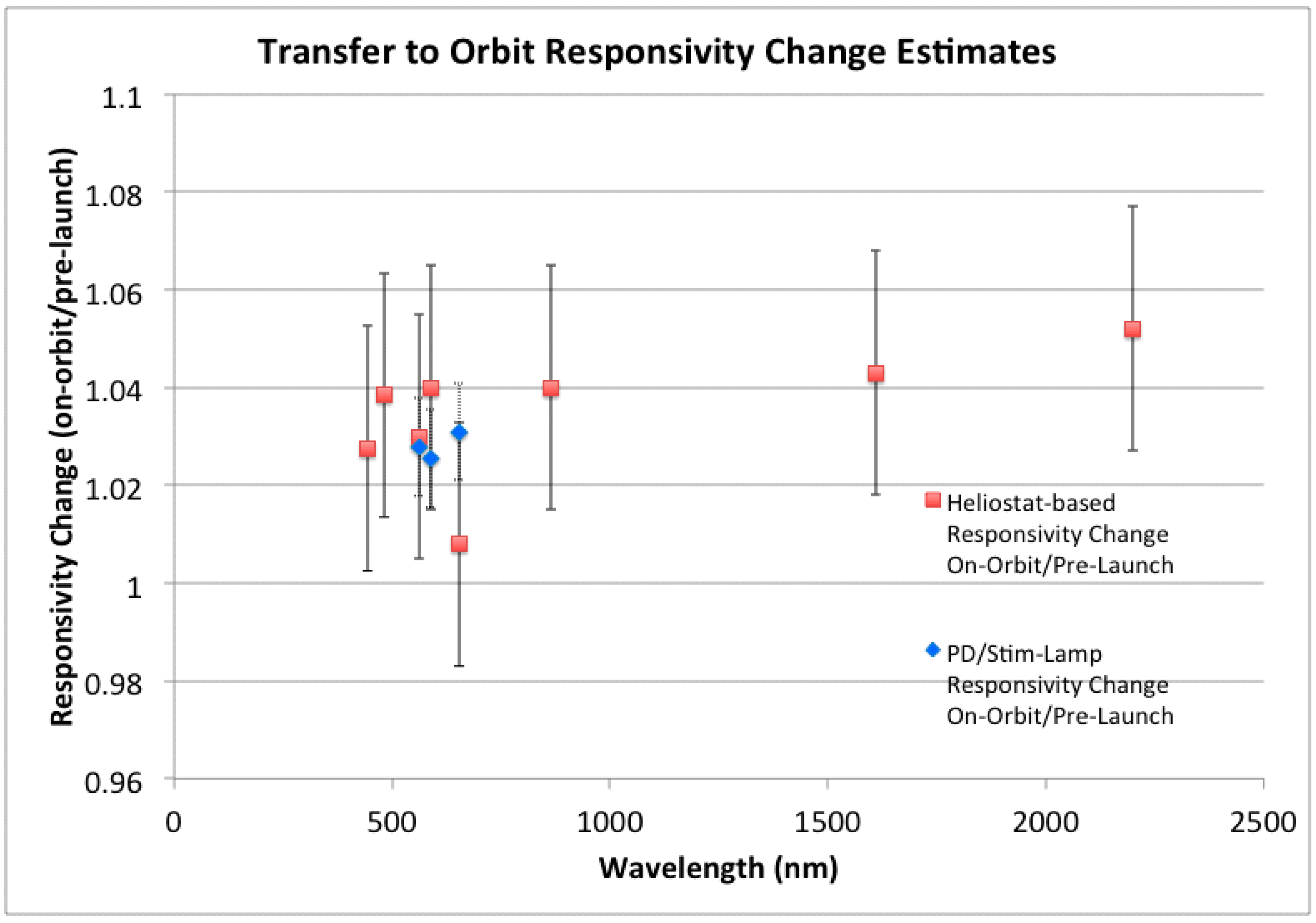
Figure 21 the change in response of the OLI instrument to the stim lamps between pre-launch testing (CATS) and on-orbit measurements is a smooth function of wavelength, from about 28% increase in the shortest wavelength to about 10% increase at the longest wavelength. Also shown are the modeled differences expected if the change was strictly a color temperature increase of 60 or 70 K assuming no other emissivity or transmissivity changes in the lamp or lamp assembly. The OLI changes do not match a blackbody temperature shift well. The photodiode response change to the stim lamp between the same observations was 2.5% less than the spectrally comparable OLI pan band. A 60 K color temperature (red line) increase that matched the photodiode response change in the panchromatic band, was used to calculate the response change in the spectrally overlapping red and green bands. These response changes are compared to the heliostat-based response changes in
Figure 22 (using heliostat results from
Table 2). The uncertainty in the photodiode-based response change is estimated at 1% based on its pre-launch stability viewing the stim lamp, though any launch-related shift is unknown.
Figure 22.
Estimated OLI responsivity changes on transfer to orbit using heliostat test (from
Table 2) and stim lamps with photodiode response.
Figure 22.
Estimated OLI responsivity changes on transfer to orbit using heliostat test (from
Table 2) and stim lamps with photodiode response.
Table 2.
Predicted OLI radiance of working diffuser based on heliostat test () compared to observed radiance assuming unchanged instrument responsivity (Lobs), Lobs/band, TOA.
Table 2.
Predicted OLI radiance of working diffuser based on heliostat test () compared to observed radiance assuming unchanged instrument responsivity (Lobs), Lobs/band, TOA.
| | CA | Blue | Green | Red | NIR | SWIR 1 | SWIR 2 | Pan |
|---|
| Mean | 1.033 | 1.040 | 1.029 | 1.007 | 1.038 | 1.045 | 1.051 | 1.041 |
| StDev | 0.009 | 0.007 | 0.005 | 0.006 | 0.005 | 0.004 | 0.005 | 0.005 |
8. Stability over Mission
Once on-orbit, radiometric-calibration related acquisitions (lamp, solar, lunar) were performed per the schedules shown in
Section 2. Data from each of these acquisitions were processed through the Image Assessment System (and, for lunar data, compared to the Lunar irradiance model) to obtain the band average responses or gains. These results are trended over time, after normalization to put them all on the same relative scale. The normalization was performed relative to the results from mission day 75, a day when where there were collects from all calibrators acquired within ±.1 day.
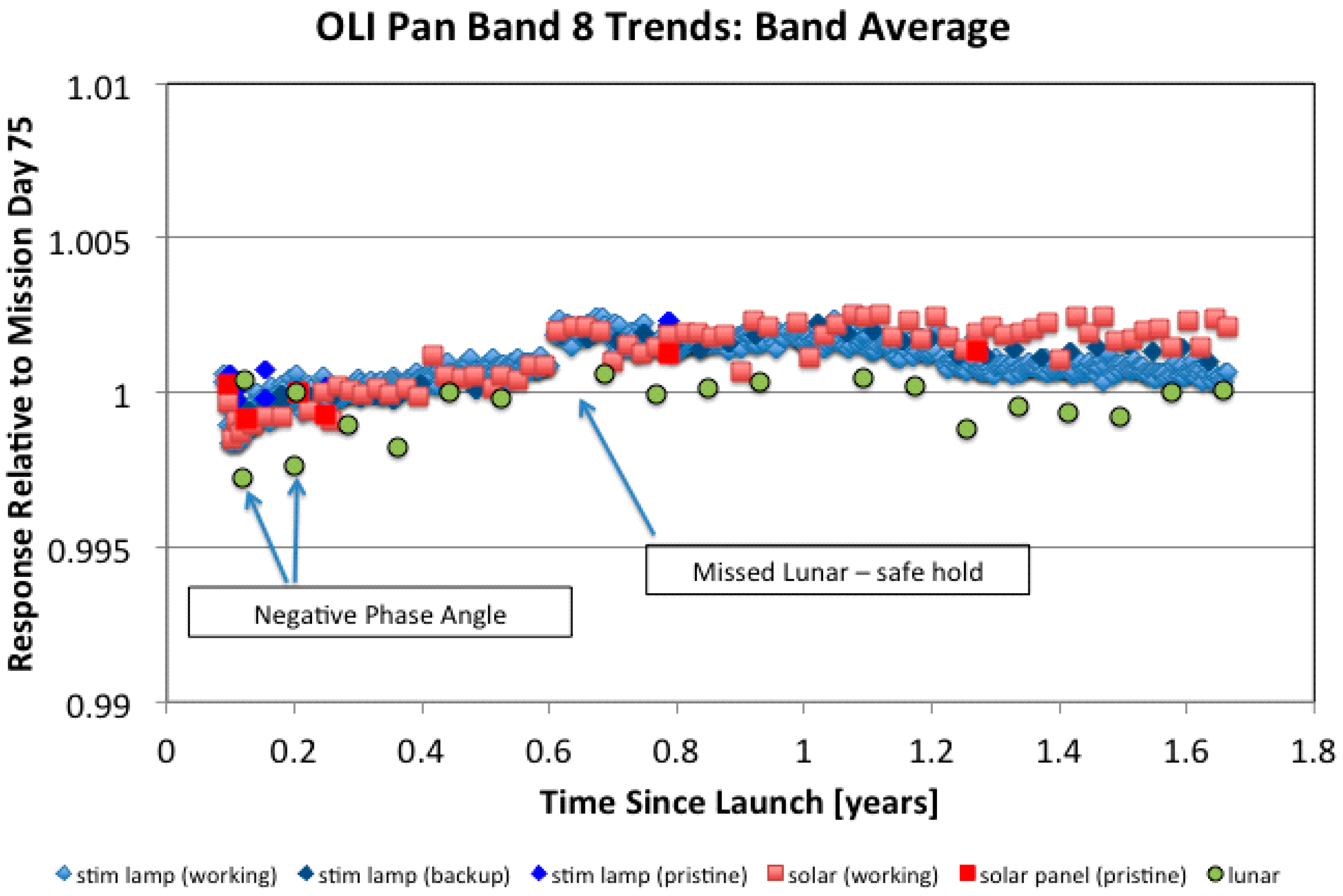
An example band (pan band) (
Figure 23) shows features common to all plots,
i.e.,
- (1)
Two of the early lunar acquisitions were at ~−7° phase angle versus the ~+7° phase angle for the remainder of the collects. These two negative phase angle points are outliers.
- (2)
A safe hold event at about 0.6 years into the mission power cycled the OLI instrument. This resulted in small changes in the responsivity of bands 1–4 and 8 of 0.1 to 0.2%. This change in response recovered about 0.1 years later for reasons currently unknown.
Figure 23.
OLI on-orbit radiometric calibration results across the current mission lifetime for the pan band.
Figure 23.
OLI on-orbit radiometric calibration results across the current mission lifetime for the pan band.
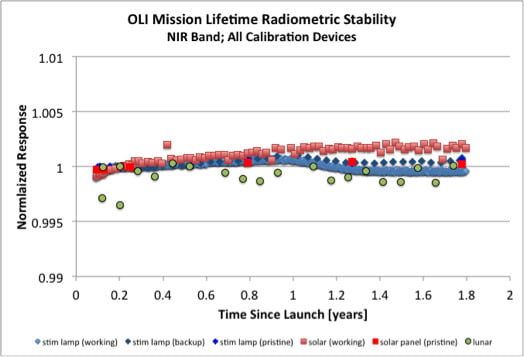
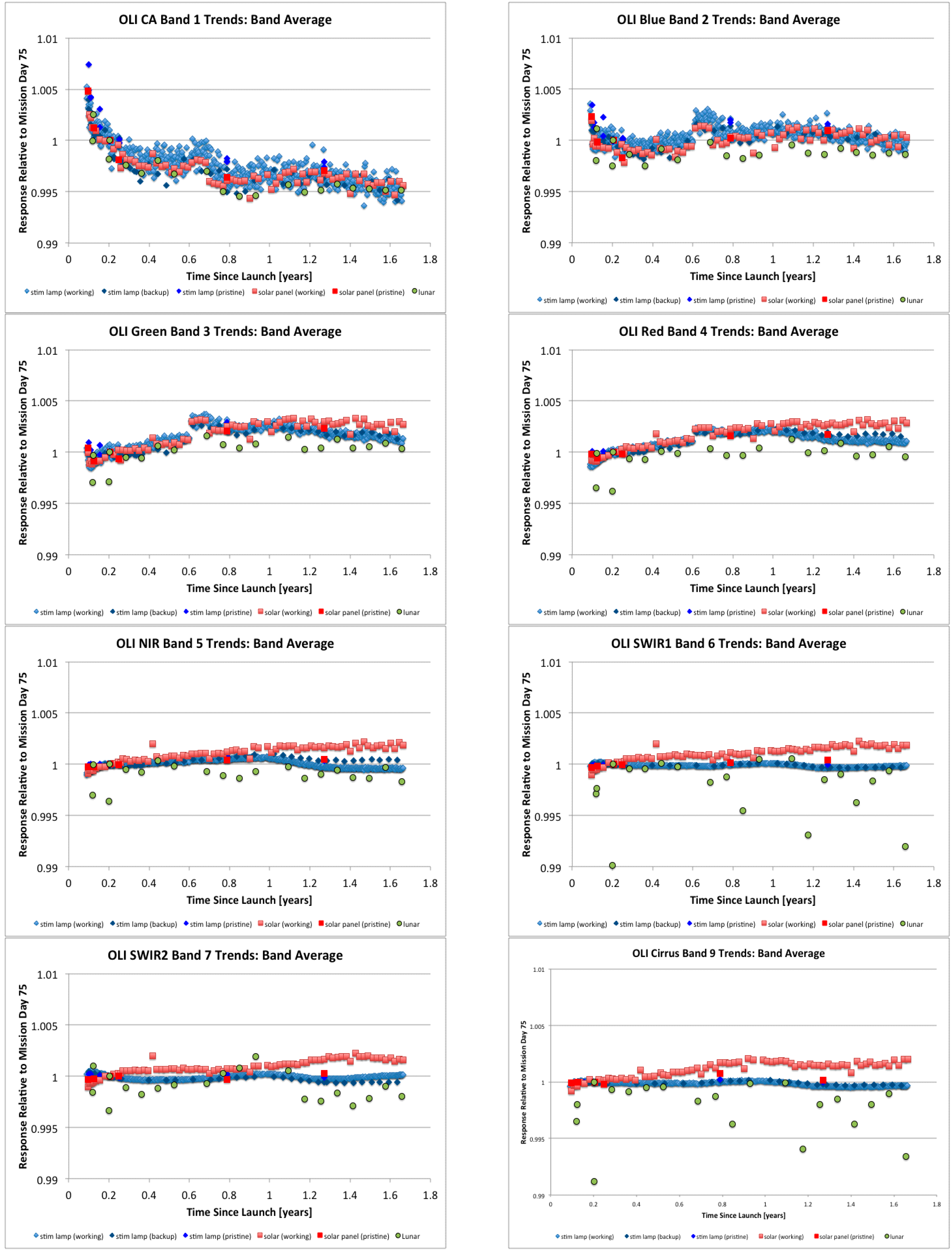
General observations on the OLI stability (
Figure 24) are:
- (1)
The OLI average response is stable to within <1% over the first 1.6 years.
- (2)
Different calibration sources generally agree to within a few tenths of a percent in the trends.
Several bands show a 0.1% to 0.3% increase in response apparent in the lamp and solar data, but less so in the lunar data.
The origin of lower precision of the lunar results, particularly in the SWIR bands, is currently under study and may be related to the integration technique.
- (3)
The divergence in the lamp and working diffuser results may indicate that the working diffuser is brightening, particularly in the NIR and SWIR.
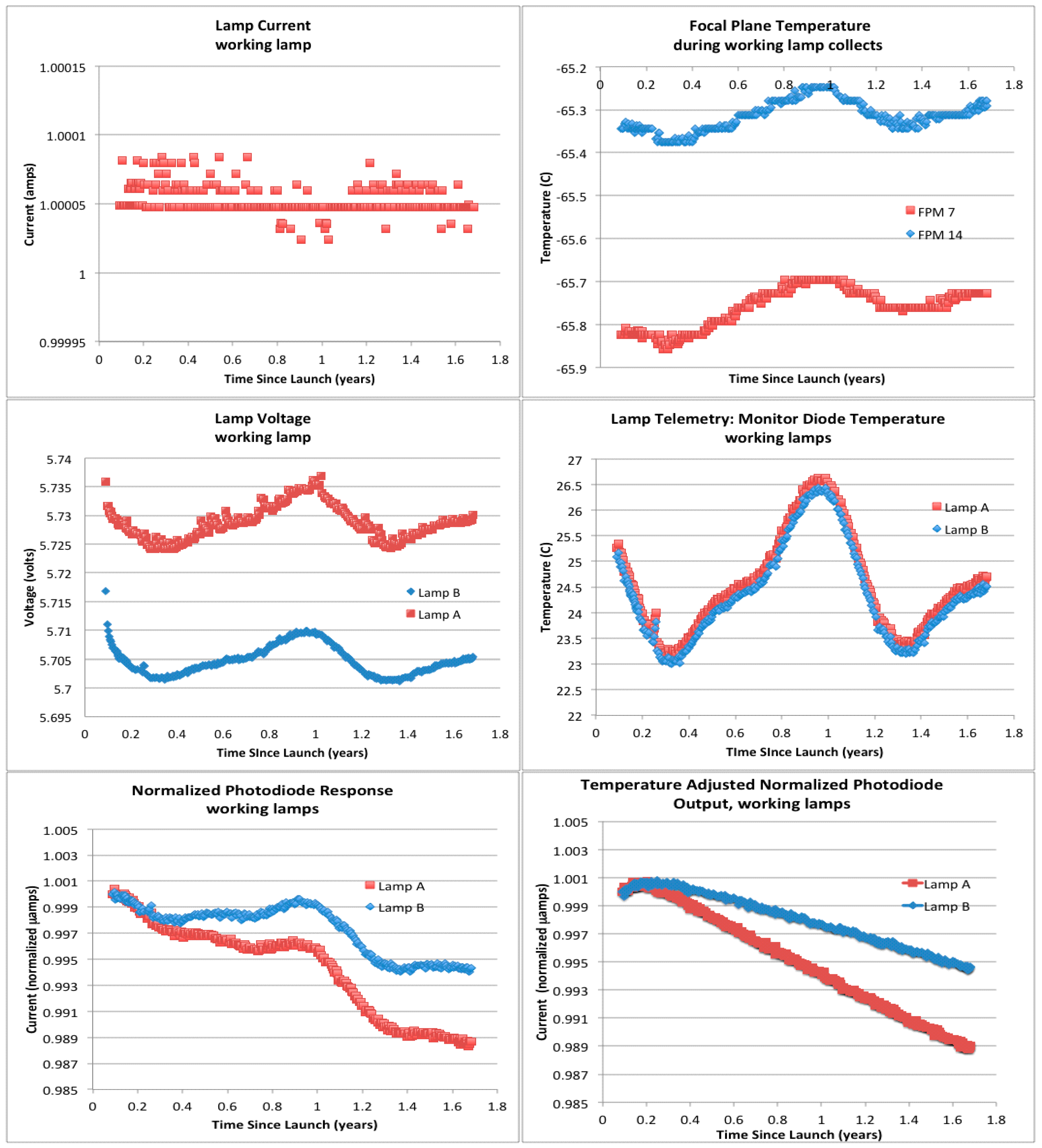
Additional information about the stability of the OLI and the OLI stim lamps can be obtained from the OLI telemetry. Trends for several temperatures as well as the lamp currents, voltages and photodiode responses are shown in
Figure 25.
Figure 24.
OLI on-orbit radiometric calibration results across the current mission lifetime for each band.
Figure 24.
OLI on-orbit radiometric calibration results across the current mission lifetime for each band.
Figure 25.
OLI Telemetry Mission Trends.
Figure 25.
OLI Telemetry Mission Trends.
Several observations on the telemetry:
- (1)
The telemetry indicates that constant current is maintained through the stim lamps at the better than ±0.01% level.
- (2)
The OLI focal plane has been maintained to better than ±0.1 °C across the mission; some seasonal variation is evident.
- (3)
The lamp voltage varies by about ±0.1% across the mission according to the telemetry and shows a correlation to the instrument temperature.
- (4)
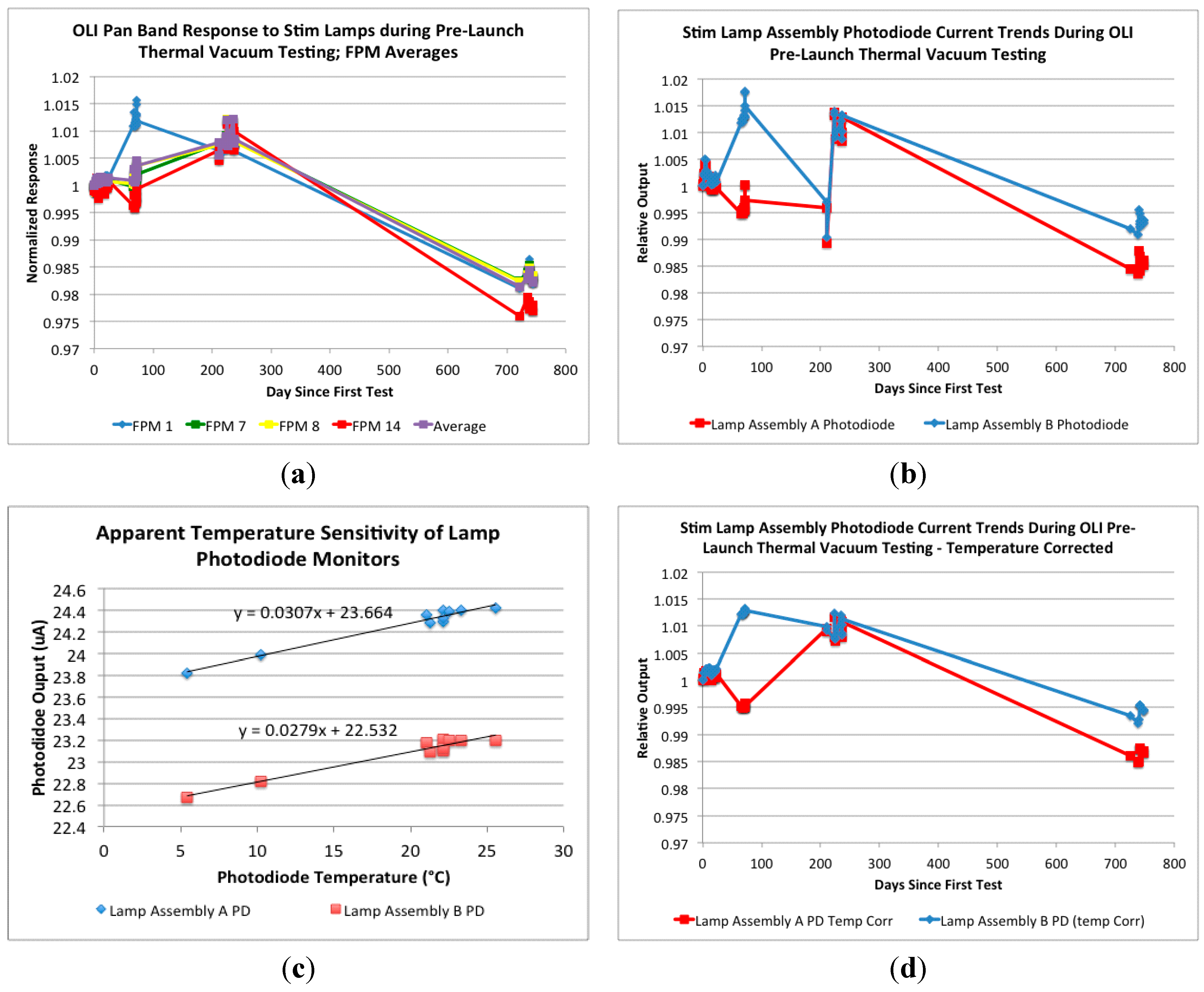
The photodiode monitors show an apparent decrease in the stim lamp radiance of ~0.5% over the mission lifetime and there is apparent temperature sensitivity in the trend. Adjusting for the temperature sensitivity (
Figure 14d) removes most of the structure, but leaves a nearly linear degradation with time. The spectrally comparable OLI panchromatic band (band 8) shows a flat to slightly increasing response to the working stim lamps, which closely matches the response to the diffusers, suggesting the change is in the monitoring circuit.
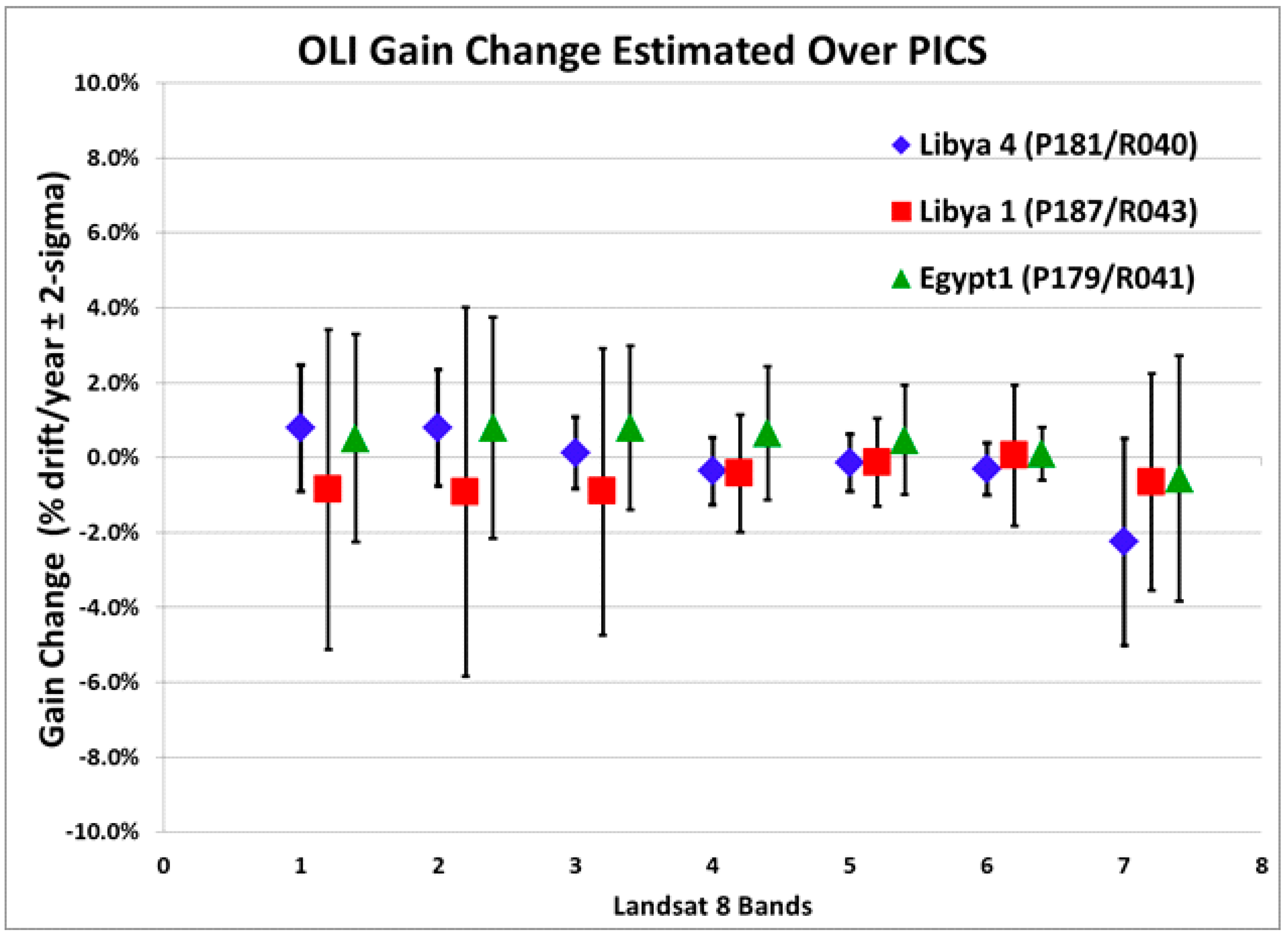
The OLI stability is also monitored relative to Pseudo-Invariant Calibration Sites (PICS) [
28], desert sites in North Africa that have been selected for their stability. The same area on the ground is selected for each acquisition over these sites, averaged and adjusted for the solar zenith angle and Earth-Sun distance. The adjusted responses are regressed over time to determine any temporal drift.
Figure 26 shows the estimated drift or gain change of each of the OLI bands relative to these sites. Other than cloud screening, there is no adjustment for site or atmospheric variation with time, so these determine the within and between site variability Note that no changes are evident within the uncertainty of the technique.
Figure 26.
OLI stability relative to desert calibration sites.
Figure 26.
OLI stability relative to desert calibration sites.
9. Comparison to Other Measurements
A number of comparisons have been performed between the OLI data and ground measurements (usually referred to as vicarious calibration) and other on-orbit sensors (usually called cross calibration) and are discussed in detail in other papers in this special issue [
2,
3].
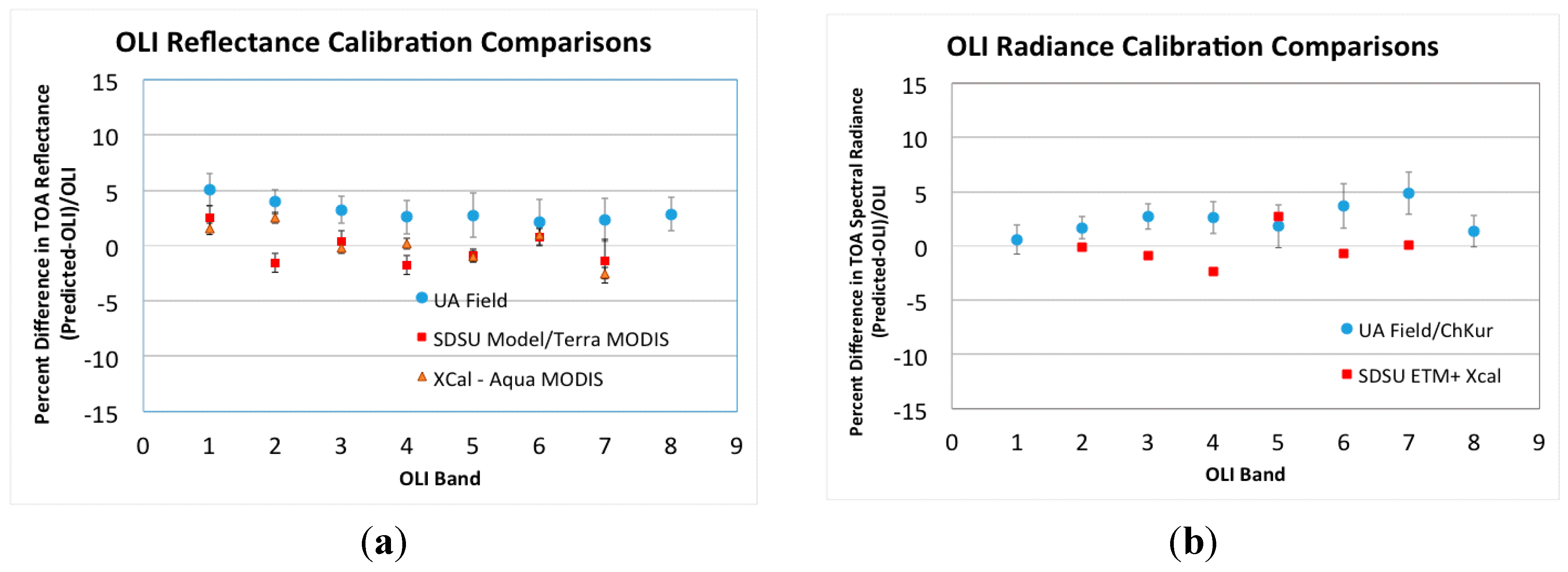
A summary of the early on-orbit comparisons to the reflectance-based calibration of OLI, shown in
Figure 27a, generally show agreement to within the uncertainty in the OLI reflectance calibration (2%,
k = 1) and the reference techniques (note that the error bars shown are precision, not total uncertainty which is in on the order of 3% for the best of the vicarious techniques). The University of Arizona vicarious measurements have a bias relative to the OLI reflectance calibration (with OLI being low) averaging about 3%. The difference is the largest in the CA band, where the other methods suggest a negative bias as well, though smaller.
Figure 27.
Comparisons of OLI operational radiometric calibrations to other measurements [
2,
3]: (
a) Reflectance calibration; (
b) Radiance calibration.
Figure 27.
Comparisons of OLI operational radiometric calibrations to other measurements [
2,
3]: (
a) Reflectance calibration; (
b) Radiance calibration.
In the radiance domain, the results are similarly consistent, where the OLI radiance uncertainty is about 3% (
Figure 27b). Note that the radiance UA results, which use the same data as the UA reflectance calibrations, but converted to radiance with a solar model, point out an inconsistency of the OLI calibrations with the solar model (Chkur) at the shortest wavelength of about 4%. In other words, given that OLI has independent reflectance and radiance calibrations, a solar irradiance can be determined from OLI diffuser observations. This OLI inferred solar irradiance (ESUN
OLI) can be calculated from the REFLECTANCE_CONVERSION factors as:
where b is the OLI band.
The uncertainty in the OLI based solar irradiances is about ~3.5%, given the ~2% reflectance uncertainty and ~3% radiance uncertainty. As shown in
Figure 28, the ESUN
OLI to ESUN
CHKUR are within 2% of the each other, except in the Coastal Aerosol and Cirrus bands. The difference in the CA and Cirrus bands may be significant.
Figure 28.
OLI inferred solar irradiance as compared to ChKur solar irradiance. Estimated uncertainty in OLI derived solar irradiance is shown.
Figure 28.
OLI inferred solar irradiance as compared to ChKur solar irradiance. Estimated uncertainty in OLI derived solar irradiance is shown.
10. Discussion
The OLI’s radiometric stability and absolute radiometric calibration performance are excellent. Firstly, the instrument has been very stable on-orbit, with little to no degradation during the early on-orbit period, where changes typically occur. Over the first 1.6 years of operation, only the CA band shows a measurable degradation of approximately 1.0% and the results are consistent between calibration techniques at about the 0.1% level. Other bands show changes at the 0.1% to 0.2%, but are not consistent across all methods. This type of performance and consistency between on-board calibration techniques is unprecedented in Landsat instrument history and rare in Earth imaging systems in general. Landsat-7 ETM+, for example, had three on-board calibration devices and none of these three was as stable as the instrument itself. By the same point in the mission history, the calibration devices showed changes as much as 5% in the opposite directions [
29]. And although the instrument itself appeared to be almost as stable as OLI (it did not have a coastal aerosol band), it took many years using vicarious calibration techniques to demonstrate this, and the ultimate confidence in this stability is much lower than OLI. Solid design, component selection and screening, contamination control and pre-launch characterization all contributed to this success. Secondly, the comparisons to ground measurements and other on-orbit assets generally show OLI absolute radiance and reflectance calibrated operational products consistent within the uncertainties of the techniques and the uncertainties in the OLI calibrations (2% to 3%). The combination of the radiance and reflectance calibrations can produce within band solar spectral irradiances at uncertainties approaching the current standards.
Two aspects of the OLI and/or the OLI calibration devices are not well understood. Firstly, the stim lamp photodiode shows changes in response to the stim lamps that do not track to within better than 2% of the spectrally comparable OLI band. This occurs in the pre-launch realm; the transfer to orbit, where the photodiode reports smaller changes in the stim lamps than the OLI; and in the on-orbit periods, where the photodiode shows about a 1% drop in lamp output that is not apparent in the OLI response. The post-launch change in the photodiode monitor response to the stim lamp appears likely to be due to something in the monitor or its circuitry, as the OLI response to the stim lamps shows little difference from the OLI response to the diffusers over time.
Secondly, the heliostat based transfer to orbit experiment indicates increased responsivity (3%–5%) in many of the OLI bands at a level greater than the estimated uncertainty in the technique (2.5%). Additionally, as noted above, the stim lamp photodiode reports a smaller increase in lamp radiance than the OLI on orbit, which is consistent with the heliostat transfer to orbit experiment. In general, if the corresponding OLI band responsivity increase is incorporated, the agreement of the radiance calibrations to ground measurements or other satellites does not improve.
11. Conclusions
The OLI instrument on Landsat-8 was extensively characterized prior to launch and radiometrically calibrated prior to launch and on-orbit. Once on orbit, the OLI instrument has been extremely stable, changing by than less than 1% in responsivity over the first year plus of operations. The OLI data are calibrated both in radiance units and reflectance units as part of the data processing and the users are provided coefficients to convert to either unit. Error analyses indicate that the reflectance product has a lower uncertainty (~2%), and it is generally has been recommended that users work with the reflectance calibration because of this. However, both products appear to be within their uncertainty requirements.
Comparisons to other sensors have given mixed answers as to whether the OLI reflectance or radiance calibration is more accurate. Also, the OLI reflectance and radiance calibration are currently independent, i.e., not tied to a specific solar irradiance model. The question arises as to whether that by accepting one of the OLI calibrations as “correct”, e.g., the reflectance calibration, and converting to radiance with an accepted solar irradiance dataset, provides a better radiance calibration (or vice versa).
This research has demonstrated that the OLI instrument is the best radiometrically calibrated reflective Landsat sensor to date. Work is now in progress to tie the full Landsat record to the OLI instrument, to provide a consistent data archive for assessing land cover and land use change.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




























