A Hierarchical Multi-Temporal InSAR Method for Increasing the Spatial Density of Deformation Measurements



Abstract
:1. Introduction
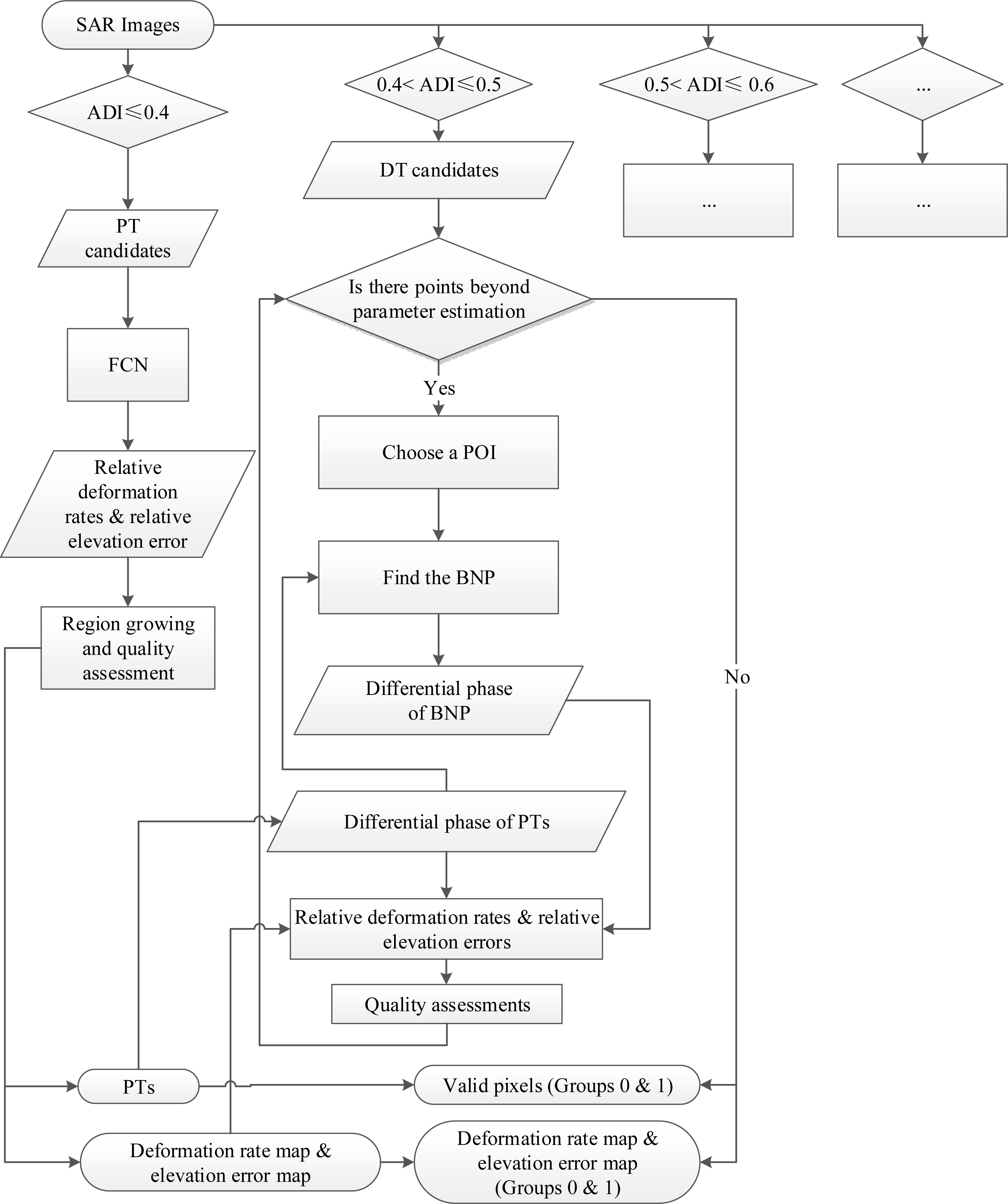
2. Hierarchical Processing for Deformation Extraction
2.1. Estimating Differential Deformation Rate between Two Valid Pixels
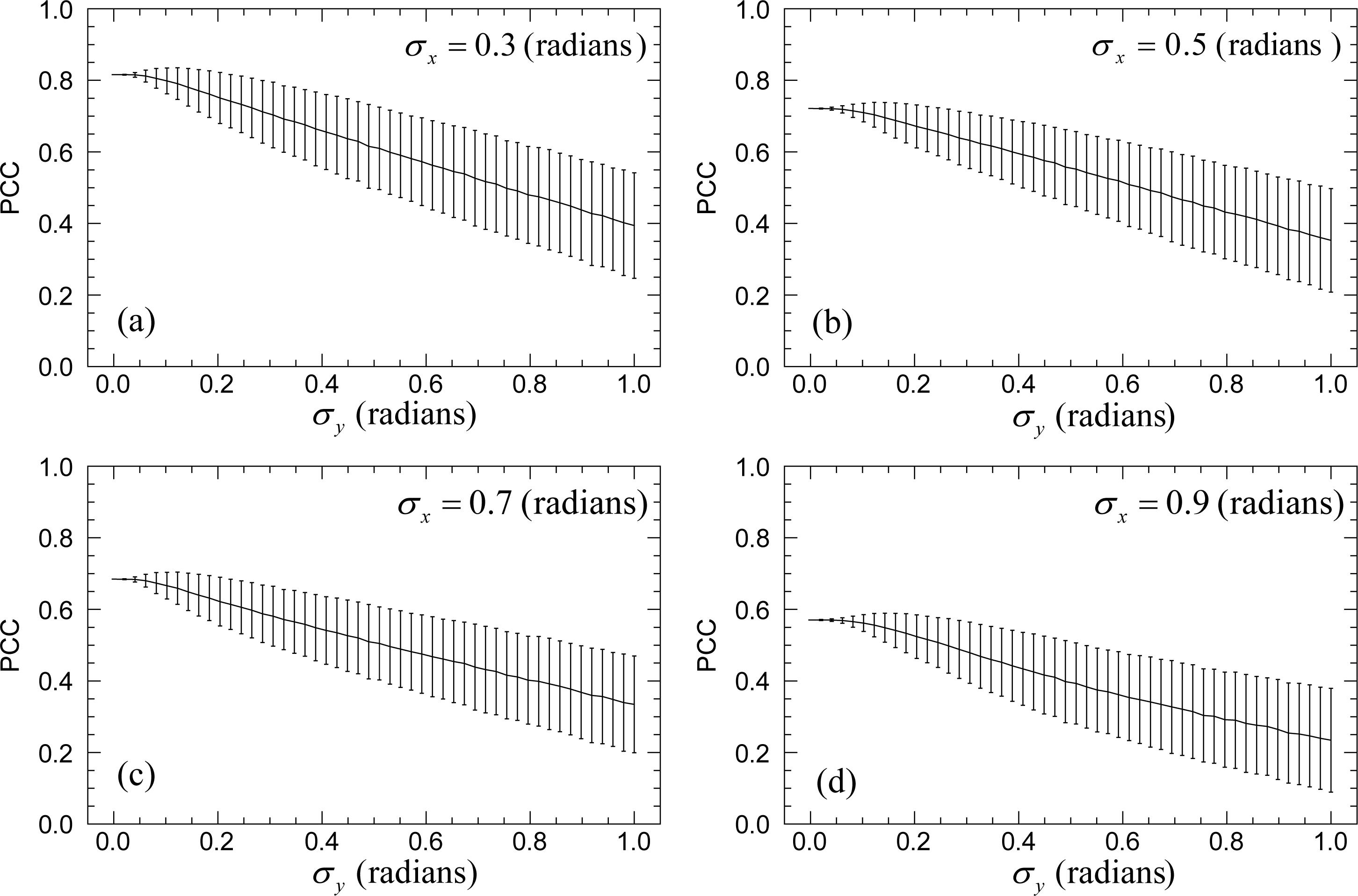
2.2. Pearson Correlation Coefficient (PCC)
2.3. Estimating Deformation Rates at the Pixels with Lower ADI Values
2.4. Estimating Deformation Rates at the Pixels with Higher ADI Values
2.5. Extracting Nonlinear Deformation Components at the Useful Pixels
3. Experimental Results and Discussion
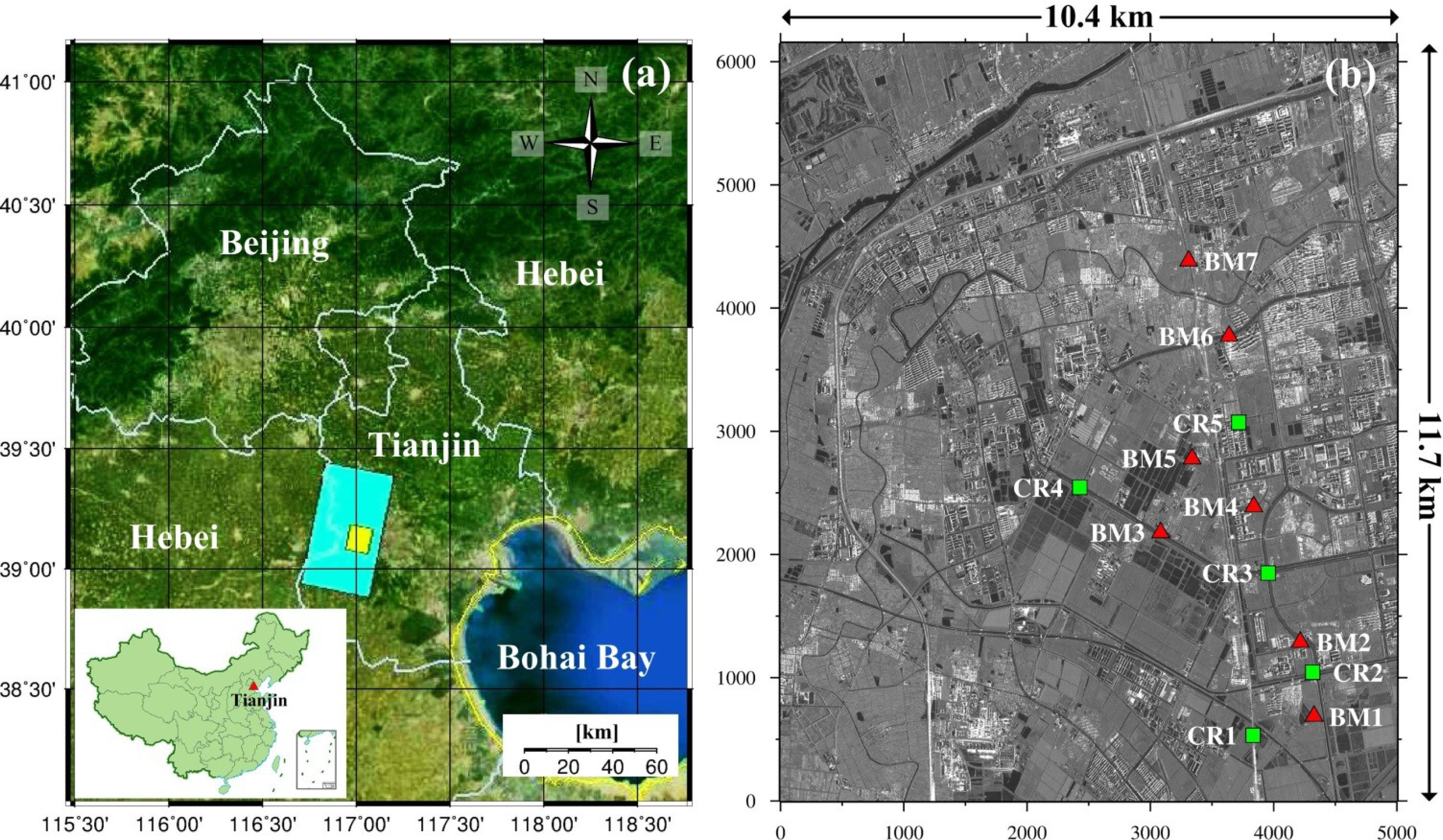
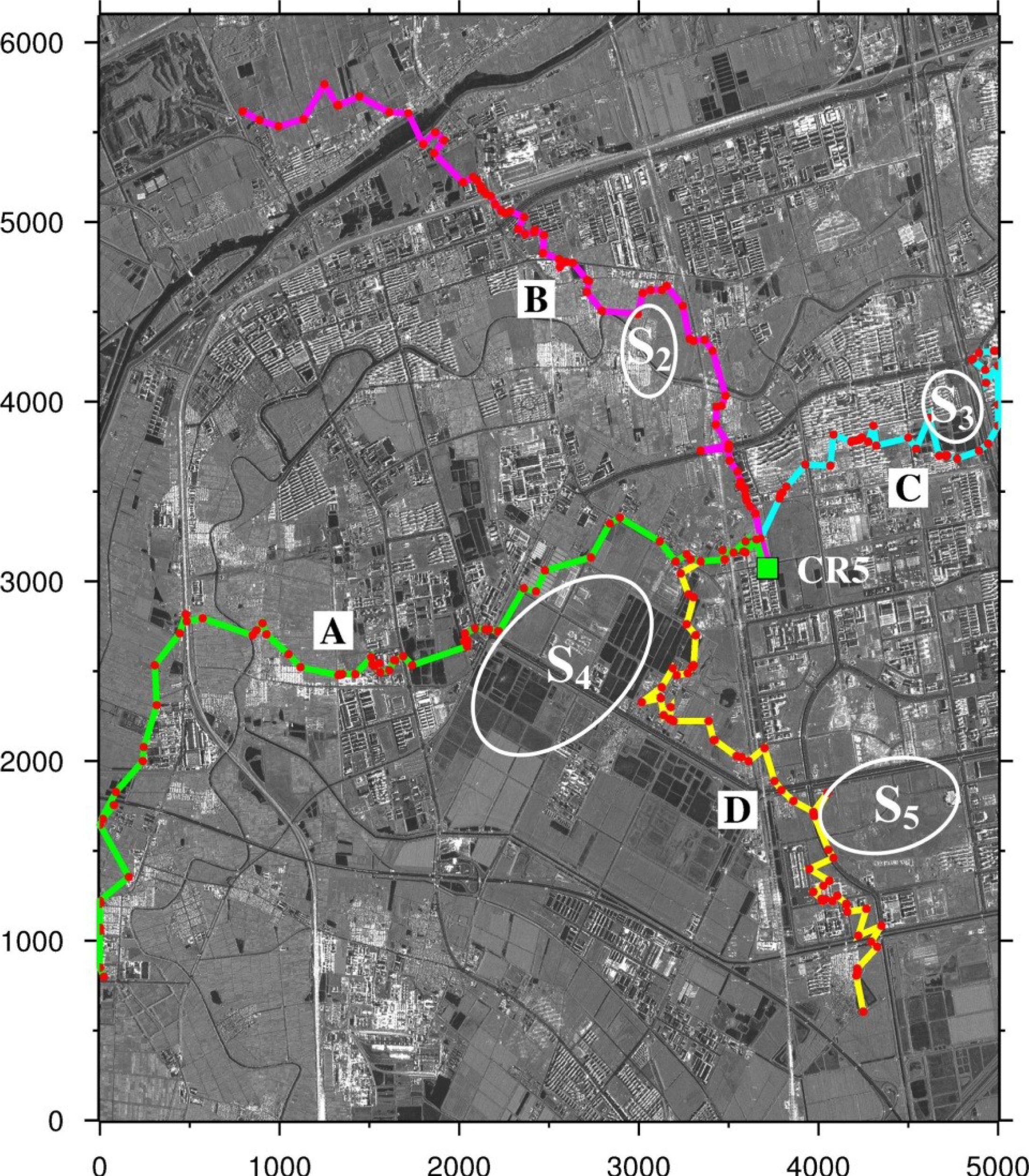
3.1. Study Area and Data Source
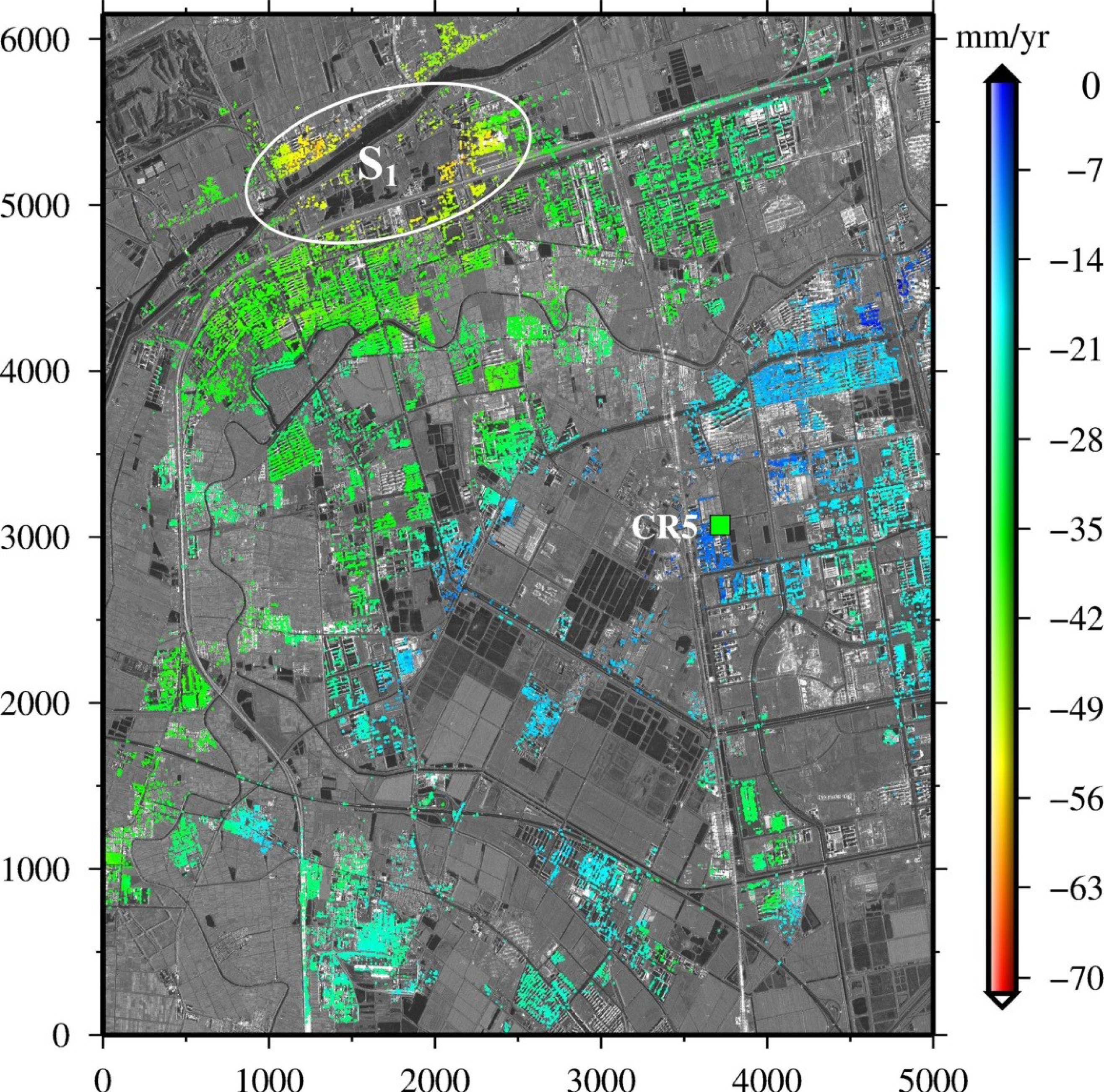
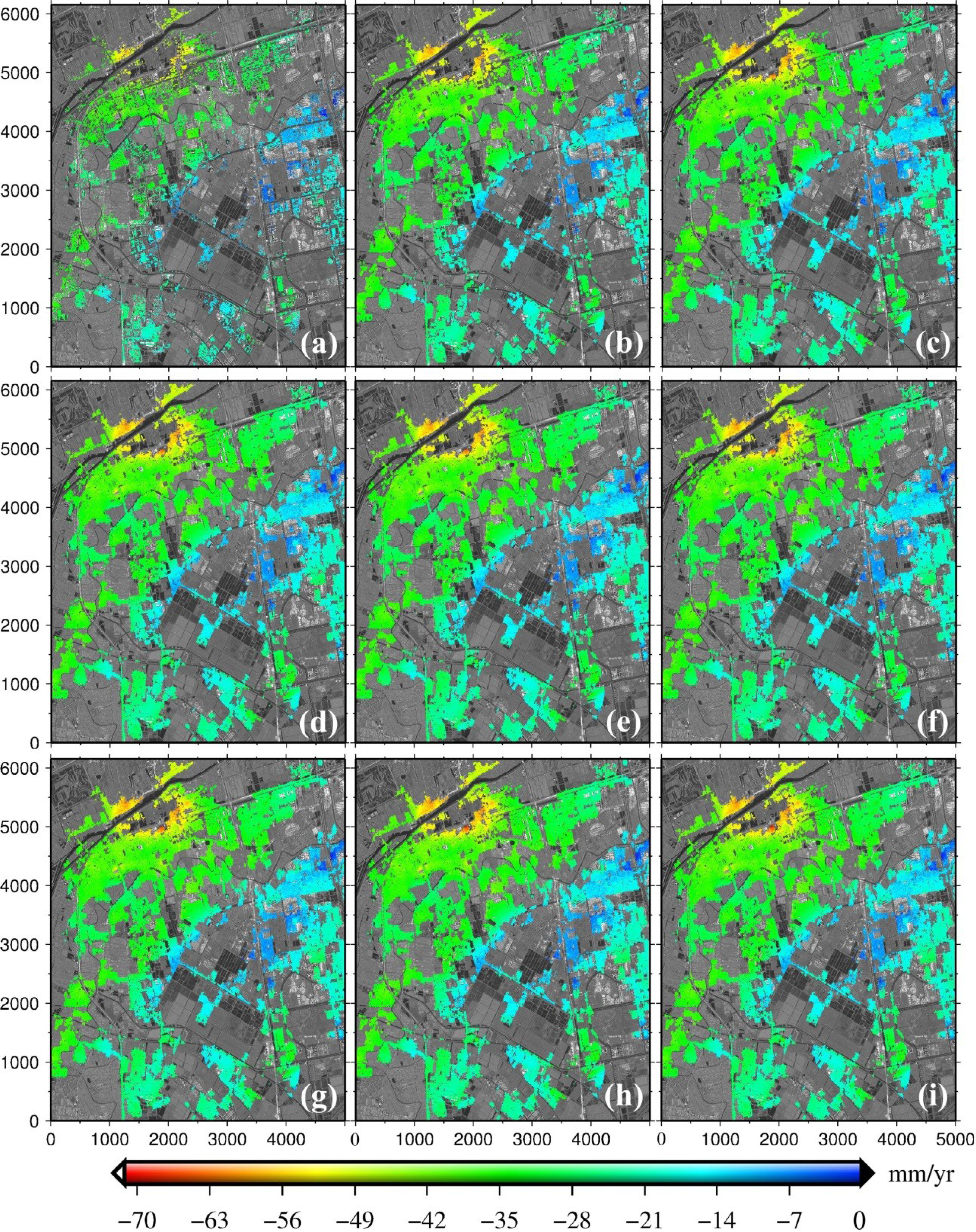
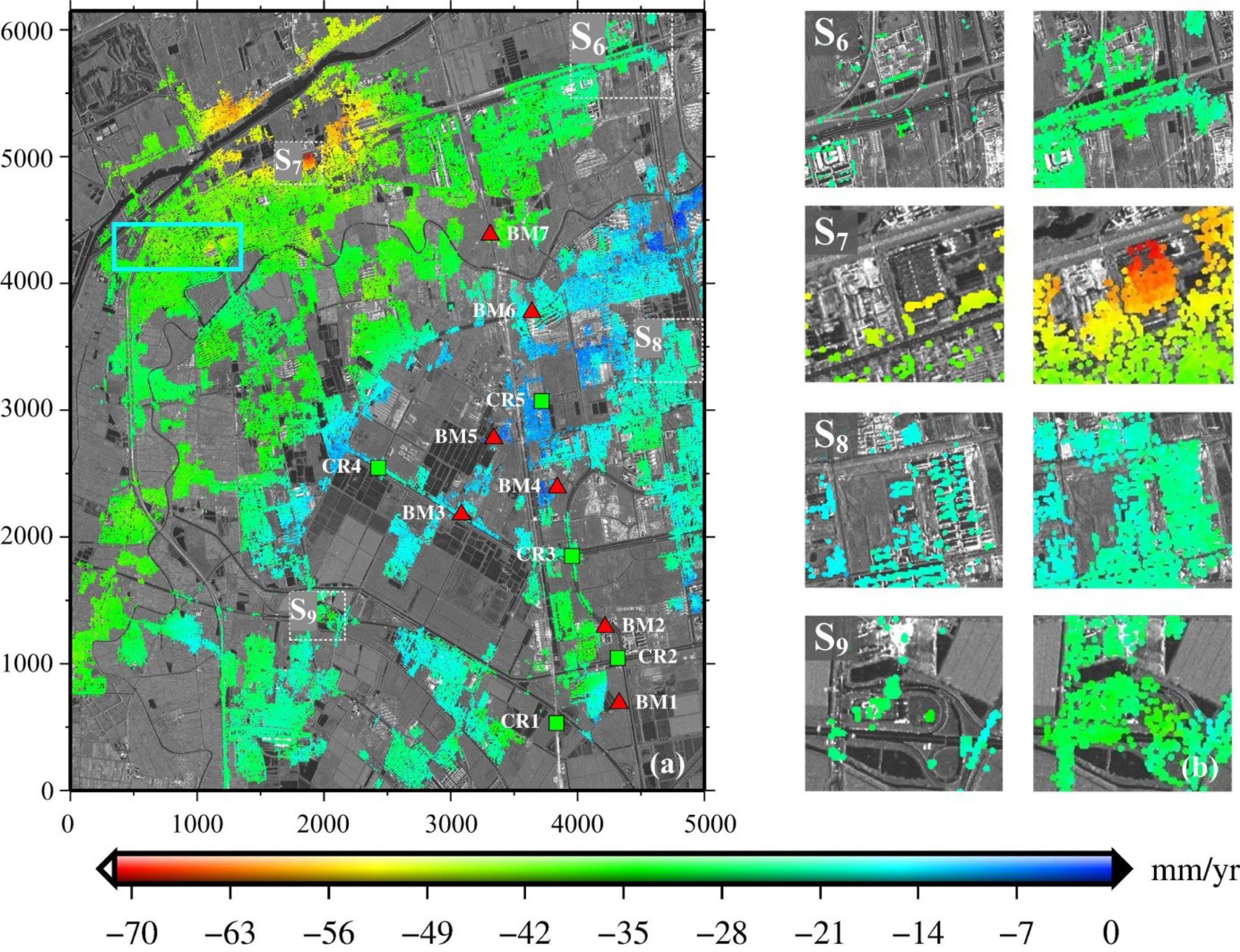
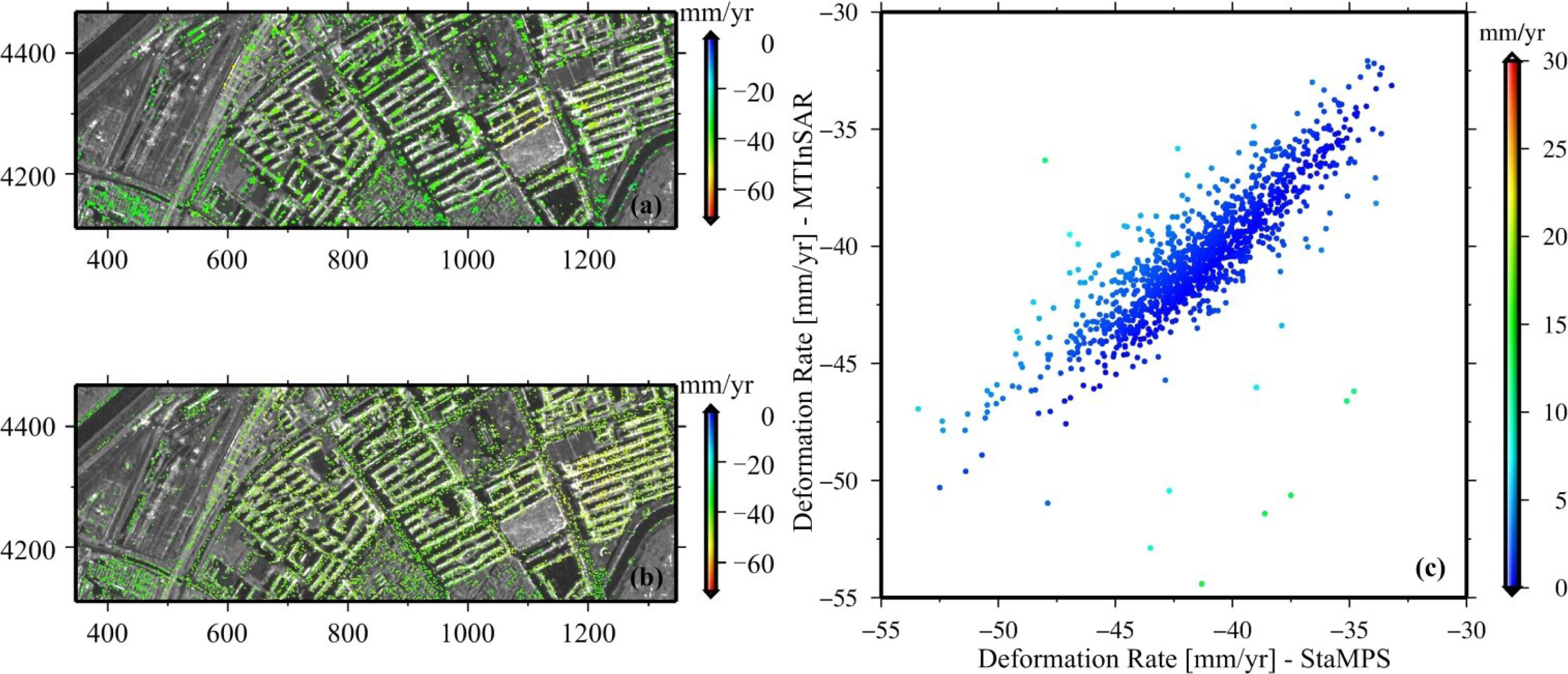
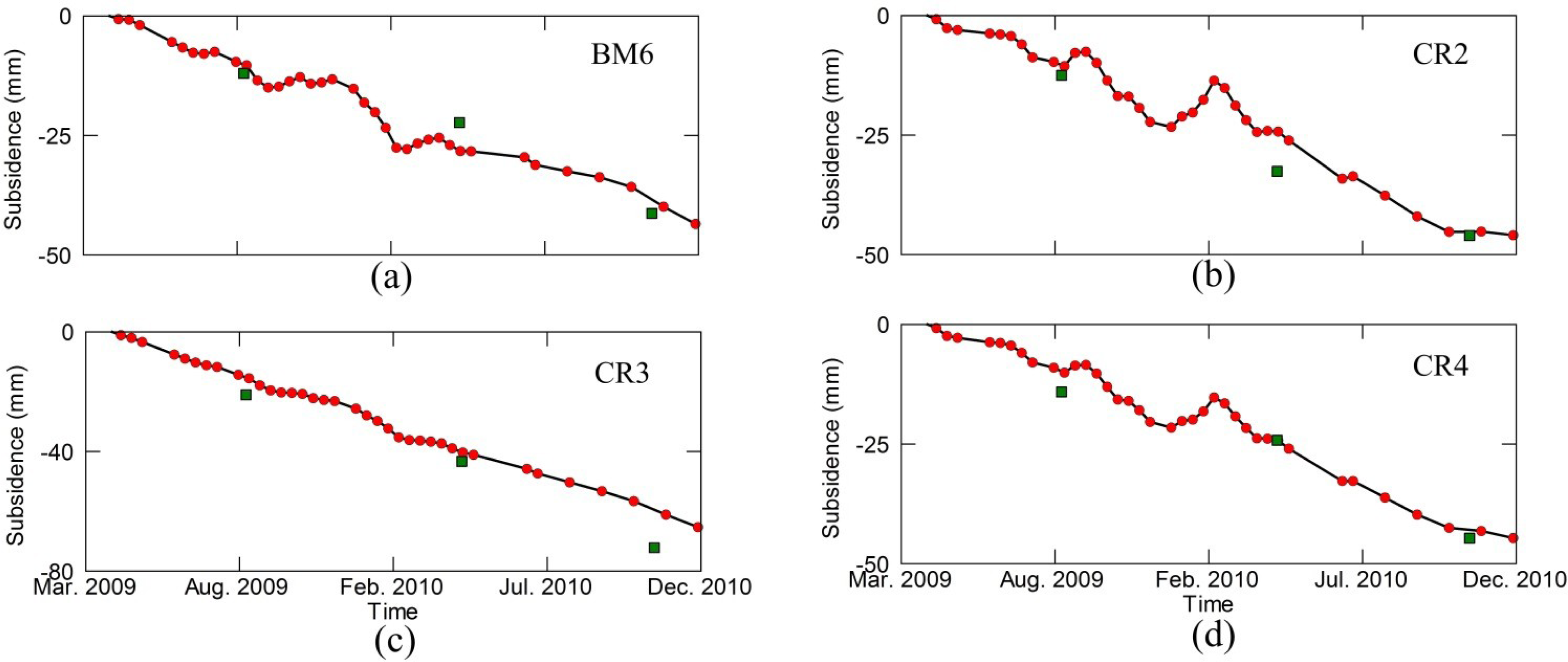
3.2. Subsidence Results and Analysis
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens 2002, 40, 2375–2383. [Google Scholar]
- Blanco-Sánchez, P.; Mallorquí, J.; Duque, S.; Monells, D. The coherent pixels technique (CPT): An advanced DInSAR technique for nonlinear deformation monitoring. Pure Appl. Geophys 2008, 165, 1167–1193. [Google Scholar]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens 2001, 39, 8–20. [Google Scholar]
- Hooper, A. A multi-temporal InSAR method incorporating both persistent scatterer and small baseline approaches. Geophys. Res. Lett 2008, 35. [Google Scholar] [CrossRef]
- Bert, M.; Kampes, N.A. The STUN algorithm for persistent scatterer interferometry. Proceedings of Fringe 2005 Workshop, Frascati, Italy, 28 November–2 December 2005.
- Liu, G.; Buckley, S.M.; Ding, X.; Chen, Q.; Luo, X. Estimating spatiotemporal ground deformation with improved persistent-scatterer radar interferometry. IEEE Trans. Geosci. Remote Sens 2009, 47, 3209–3219. [Google Scholar]
- Mora, O.; Mallorqui, J.J.; Broquetas, A. Linear and nonlinear terrain deformation maps from a reduced set of interferometric SAR images. IEEE Trans. Geosci. Remote Sens 2003, 41, 2243–2253. [Google Scholar]
- Casu, F.; Manzo, M.; Pepe, A.; Lanari, R. SBAS-DInSAR analysis of very extended areas: First results on a 60,000 km2 test site. IEEE Geosci. Remote Sens. Lett 2008, 5, 438–442. [Google Scholar]
- Colesanti, C.; Ferretti, A.; Novali, F.; Prati, C.; Rocca, F. SAR monitoring of progressive and seasonal ground deformation using the permanent scatterers technique. IEEE Trans. Geosci. Remote Sens 2003, 41, 1685–1701. [Google Scholar]
- Kampes, B.M. Radar Interferometry: Persistent Scatterer Technique; German Aerospace Center (DLR): Cologne, Germany, 2006. [Google Scholar]
- Lanari, R. Satellite radar interferometry time series analysis of surface deformation for Los Angeles, California. Geophys. Res. Lett 2004, 31. [Google Scholar] [CrossRef]
- Tizzani, P.; Berardino, P.; Casu, F.; Euillades, P.; Manzo, M.; Ricciardi, G.P.; Zeni, G.; Lanari, R. Surface deformation of Long Valley caldera and Mono Basin, California, investigated with the SBAS-InSAR approach. Remote Sens. Environ 2007, 108, 277–289. [Google Scholar]
- Wegmüller, U.; Walter, D.; Spreckels, V.; Werner, C.L. Nonuniform ground motion monitoring with TerraSAR-X persistent scatterer interferometry. IEEE Trans. Geosci. Remote Sens 2010, 48, 895–904. [Google Scholar]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens 1992, 30, 950–959. [Google Scholar]
- Goldstein, R. Atmospheric limitations to repeat-track radar interferometry. Geophys. Res. Lett 1995, 22, 2517–2520. [Google Scholar]
- Hanssen, R.F.; Weckwerth, T.M.; Zebker, H.A.; Klees, R. High-resolution water vapor mapping from interferometric radar measurements. Science 1999, 283, 1297–1299. [Google Scholar]
- Zhang, L.; Ding, X.; Lu, Z. Modeling PSInSAR time series without phase unwrapping. IEEE Trans. Geosci. Remote Sens 2011, 49, 547–556. [Google Scholar]
- Schunert, A.; Soergel, U. Grouping of persistent scatterers in high-resolution SAR data of urban scenes. ISPRS J. Photogramm. Remote Sens 2012, 73, 80–88. [Google Scholar]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens 2011, 49, 3460–3470. [Google Scholar]
- Rodgers, J.L.; Nicewander, W.A. Thirteen ways to look at the correlation coefficient. Am. Stat 1988, 42, 59–66. [Google Scholar]
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear subsidence rate estimation using permanent scatterers in differential SAR interferometry. IEEE Trans. Geosci. Remote Sens 2000, 38, 2202–2212. [Google Scholar]
- Hooper, A.; Segall, P.; Zebker, H. Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcán Alcedo, Galápagos. J. Geophys. Res 2007, 112. [Google Scholar] [CrossRef]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. Interferometric Point Target Analysis for Deformation Mapping. Proceedings of 2003 IEEE International Geoscience and Remote Sensing Symposium, IGARSS ’03, Toulouse, France, 21–25 July 2003; pp. 4362–4364.
- Lanari, R.; Mora, O.; Manunta, M.; Mallorqui, J.J.; Berardino, P.; Sansosti, E. A small-baseline approach for investigating deformations on full-resolution differential SAR interferograms. IEEE Trans. Geosci. Remote Sens 2004, 42, 1377–1386. [Google Scholar]
- Challenges and Prospects of Sustainable Water Management in Tianjin. Available online: http://enviroscope.iges.or.jp/modules/envirolib/upload/981/attach/07_chapter3-4tianjin.pdf (accessed on 9 November 2008).
- Hu, B.; Zhou, J.; Wang, J.; Chen, Z.; Wang, D.; Xu, S. Risk assessment of land subsidence at Tianjin coastal area in China. Environ. Earth Sci 2009, 59, 269–276. [Google Scholar]
- Hu, R.L.; Yue, Z.Q.; Wang, L.C.; Wang, S.J. Review on current status and challenging issues of land subsidence in China. Eng. Geol 2004, 76, 65–77. [Google Scholar]
- Lixin, Y.; Fang, Z.; He, X.; Shijie, C.; Wei, W.; Qiang, Y. Land subsidence in Tianjin, China. Environ. Earth Sci 2011, 62, 1151–1161. [Google Scholar]
- Liu, G.; Jia, H.; Zhang, R.; Zhang, H.; Jia, H.; Yu, B.; Sang, M. Exploration of subsidence estimation by persistent scatterer InSAR on time series of high resolution TerraSAR-X images. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens 2011, 4, 159–170. [Google Scholar]
- Sousa, J.; Hooper, A.; Hanssen, R.; Bastos, L.; Ruiz, A. Persistent scatterer InSAR: A comparison of methodologies based on a model of temporal deformation vs. spatial correlation selection criteria. Remote Sens. Environ 2011, 115, 2652–2663. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Images | Imaging Dates | Tk (days) | (m) | No. of Images | Imaging Dates | Tk (days) | (m) |
|---|---|---|---|---|---|---|---|
| 1 | 20090327 * | −231 | 42 | 21 | 20091205 | 22 | 127 |
| 2 | 20090407 | −220 | 69 | 22 | 20091227 | 44 | 134 |
| 3 | 20090418 | −209 | −23 | 23 | 20100107 | 55 | −25 |
| 4 | 20090429 | −198 | 13 | 24 | 20100118 | 66 | −27 |
| 5 | 20090510 | −187 | 31 | 25 | 20100129 | 77 | −7 |
| 6 | 20090521 | −176 | 65 | 26 | 20100209 | 88 | −383 |
| 7 | 20090623 | −143 | −76 | 27 | 20100220 | 99 | −156 |
| 8 | 20090704 | −132 | −17 | 28 | 20100303 | 110 | −152 |
| 9 | 20090715 | −121 | −33 | 29 | 20100314 | 121 | −105 |
| 10 | 20090726 | −110 | −113 | 30 | 20100325 | 132 | 9 |
| 11 | 20090806 | −99 | 139 | 31 | 20100405 | 143 | −93 |
| 12 | 20090828 | −77 | −102 | 32 | 20100416 | 154 | −127 |
| 13 | 20090908 | −66 | 37 | 33 | 20100427 | 165 | −36 |
| 14 | 20090919 | −55 | −64 | 34 | 20100621 | 220 | 19 |
| 15 | 20090930 | −44 | −182 | 35 | 20100702 | 231 | −78 |
| 16 | 20091011 | −33 | −39 | 36 | 20100804 | 264 | 82 |
| 17 | 20091022 | −22 | −66 | 37 | 20100906 | 297 | 1 |
| 18 | 20091102 | −11 | 120 | 38 | 20101009 | 330 | 158 |
| 19 | 20091113 | 0 | 0 | 39 | 20101111 | 363 | −23 |
| 20 | 20091124 | 11 | 47 | 40 | 20101214 | 396 | −93 |
| Group No. | Number of Valid Pixels | Group No. | Number of Valid Pixels | Group No. | Number of Valid Pixels |
|---|---|---|---|---|---|
| 0 | 91,601 | 3 | 2707 | 6 | 3364 |
| 1 | 177,805 | 4 | 1149 | 7 | 2196 |
| 2 | 40,551 | 5 | 1253 | 8 | 563 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Li, T.; Liu, G.; Lin, H.; Jia, H.; Zhang, R.; Yu, B.; Luo, Q. A Hierarchical Multi-Temporal InSAR Method for Increasing the Spatial Density of Deformation Measurements. Remote Sens. 2014, 6, 3349-3368. https://doi.org/10.3390/rs6043349
Li T, Liu G, Lin H, Jia H, Zhang R, Yu B, Luo Q. A Hierarchical Multi-Temporal InSAR Method for Increasing the Spatial Density of Deformation Measurements. Remote Sensing. 2014; 6(4):3349-3368. https://doi.org/10.3390/rs6043349
Chicago/Turabian StyleLi, Tao, Guoxiang Liu, Hui Lin, Hongguo Jia, Rui Zhang, Bing Yu, and Qingli Luo. 2014. "A Hierarchical Multi-Temporal InSAR Method for Increasing the Spatial Density of Deformation Measurements" Remote Sensing 6, no. 4: 3349-3368. https://doi.org/10.3390/rs6043349
APA StyleLi, T., Liu, G., Lin, H., Jia, H., Zhang, R., Yu, B., & Luo, Q. (2014). A Hierarchical Multi-Temporal InSAR Method for Increasing the Spatial Density of Deformation Measurements. Remote Sensing, 6(4), 3349-3368. https://doi.org/10.3390/rs6043349