
Oil Spill Detection in Glint-Contaminated Near-Infrared MODIS Imagery

Abstract
:1. Introduction
2. The Data
2.1. The Oil Spill Database

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene | MODIS File | Date | Oil Spill Location | Oil Spill-Water Contrast |
|---|---|---|---|---|
| 1 | A20062001040 | 19 July 2006 | Lebanon coast | Positive |
| 34.50°–36.00°E, 33.50°–35.00°N | ||||
| 2 | T20062040835 | 23 July 2006 | Lebanon coast | Positive |
| 34.50°–36.00°E, 33.50°–35.00°N | ||||
| 3 | A20062071045 | 26 July 2006 | Lebanon coast | Positive |
| 34.50°–36.00°E, 33.50°–35.00°N | ||||
| 4 | A20062161040 | 4 August 2006 | Lebanon coast | Positive |
| 34.50°–36.00°E, 33.50°–35.00°N | ||||
| 5 | T20101441650 | 24 May 2010 | Gulf of Mexico | Positive |
| 90.00°–87.10°W, 27.50°–30.50°N | ||||
| 6 | A20042441120 | 31 August 2004 | Crete | Negative |
| 25.00°–27.50°E, 32.00°–34.00°N | ||||
| 7 | A20101471855 | 27 May 2010 | Gulf of Mexico | Positive/Negative |
| 90.00°–87.10°W, 27.50°–30.50°N | ||||
| 8 | A20101151855 | 25 April 2010 | Gulf of Mexico | Positive |
| 88.90°–87.80°W, 28.46°–29.50°N | ||||
| 9 | T20101191655 | 29 April 2010 | Gulf of Mexico | Positive |
| 88.90°–87.80°W, 28.46°–29.50°N | ||||
| 10 | A20101451905 | 25 May 2010 | Gulf of Mexico | Positive |
| 90.00°–87.10°W, 27.50°–30.50°N | ||||
| 11 | A20132290935 | 17 August 2013 | Arabian Gulf | Positive |
| 52.70°–53.50°E, 25.90°–26.30°N |

2.2. Modis Data Products
- Top of atmosphere (TOA) radiance: Lt;
- Rayleigh radiance: Lr;
- Aerosol radiance: La;
- Aerosol optical thickness: taua (τa used hereafter);
- Aerosol models: aer_model_min, aer_model_max, aer_model_ratio;
- Normalized sun glint radiance: glint_coef (LGN hereafter).
- Sun and solar zenith angles: solz, senz (θ0, θ hereafter);
- Sun and solar azimuth angles: sola, sena.
- Wind speed: wind_speed.
3. Oil Spill Detection Methodology
3.1. Background
3.2. Oil Spill Detection Strategy
3.3. MODIS Sun Glint Radiance Computation (L'GN)
| Scene | Location | Aerosol Model Min | Aerosol Model Max | Aerosol Model Ratio | τa(859) |
|---|---|---|---|---|---|
| 1 | Lebanon coast 30.00°–34.00°E, 33.50°–35.00°N | 26 | 25 | 0.49 | 0.18 |
| r70f05v01 | r70f10v01 | ||||
| 0.35 | 0.68 | ||||
| 2 | Lebanon coast 30.00°–34.00°E, 33.50°–35.00°N | 26 | 25 | 0.55 | 0.12 |
| r70f05v01 | r70f10v01 | ||||
| 0.35 | 0.68 | ||||
| 3 | Lebanon coast 29.00°–34.00°E, 33.50°–35.00°N | 26 | 25 | 0.38 | 0.21 |
| r70f05v01 | r70f10v01 | ||||
| 0.35 | 0.68 | ||||
| 4 | Lebanon coast 30.00°–34.00°E, 33.50°–35.00°N | 26 | 25 | 0.70 | 0.18 |
| r70f05v01 | r70f10v01 | ||||
| 0.35 | 0.68 | ||||
| 5 | Gulf of Mexico 90.00°–84.50°W, 27.50°–30.50°N | 57 | 56 | 0.78 | 0.30 |
| r85f02v01 | r85f05v01 | ||||
| 0.15 | 0.45 | ||||
| 6 | Crete 24.00°–29.00°E, 32.00°N–34.00°N | 24 | 23 | 0.51 | 0.08 |
| r70f20v01 | r70f20v01 | ||||
| 1.12 | 1.40 | ||||
| 7 | Gulf of Mexico 90.00°–85.50°W, 27.50°–30.50°N | 26 | 25 | 0.50 | 0.18 |
| r70f05v01 | r70f10v01 | ||||
| 0.35 | 0.68 | ||||
| 8 | Gulf of Mexico 90.00°–85.50°W, 27.50°–30.50°N | 26 | 25 | 0.60 | 0.10 |
| r70f05v01 | r70f10v01 | ||||
| 0.35 | 0.68 | ||||
| 9 | Gulf of Mexico 90.00°–85.50°W, 27.50°–30.50°N | 27 | 26 | 0.50 | 0.15 |
| r70f02v01 | r70f05v01 | ||||
| 0.07 | 0.35 | ||||
| 10 | Gulf of Mexico 90.00°–85.50°W, 27.50°–30.50°N | 25 | 24 | 0.46 | 0.15 |
| r70f10v01 | r70f20v01 | ||||
| 0.68 | 1.12 | ||||
| 11 | Arabian Gulf 49.00°–56.00°E, 24.00°–27.00°N | 6 | 5 | 0.80 | 0.35 |
| r30f05v01 | r30f10v01 | ||||
| 0.29 | 0.61 |
4. Results
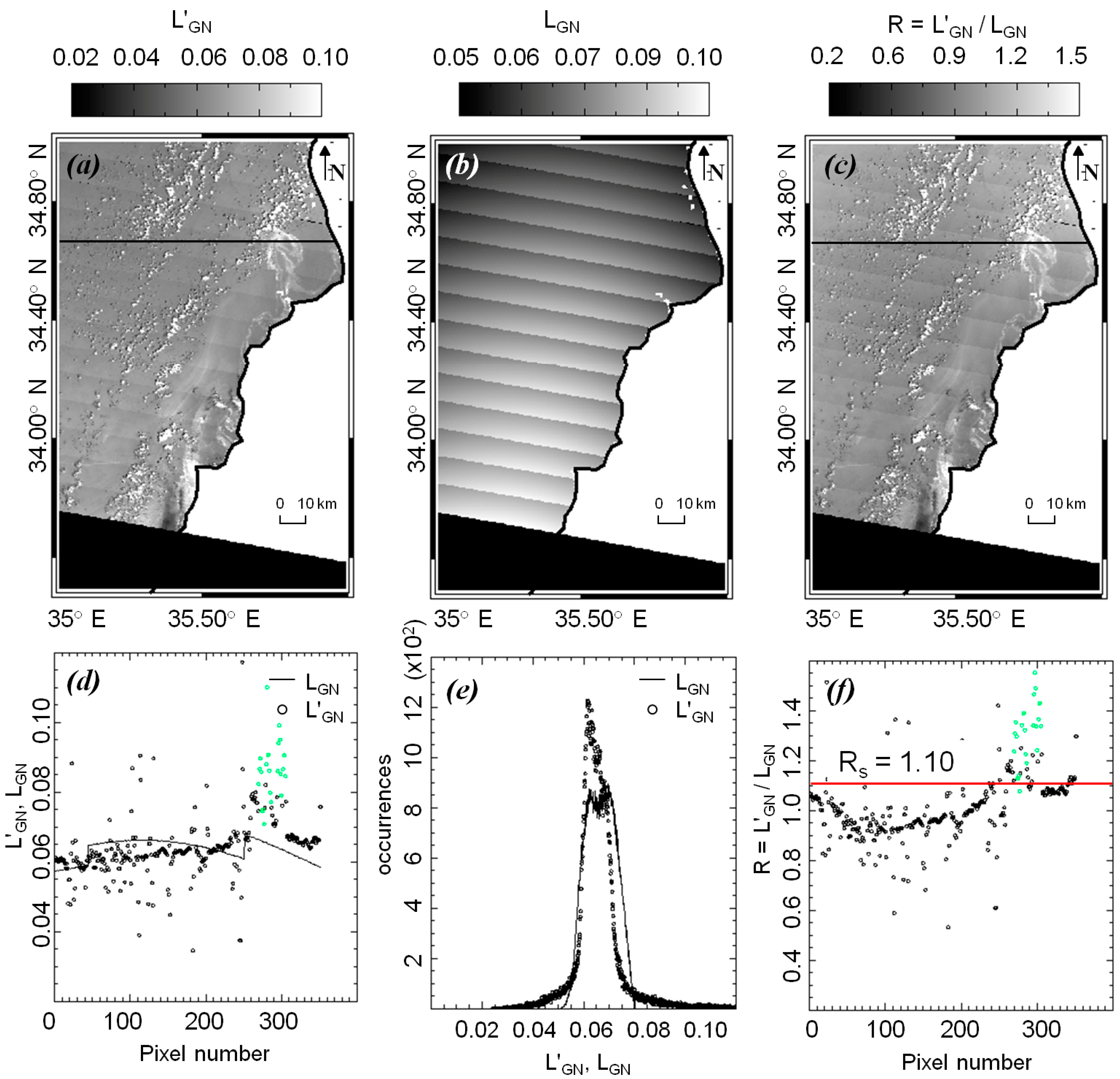
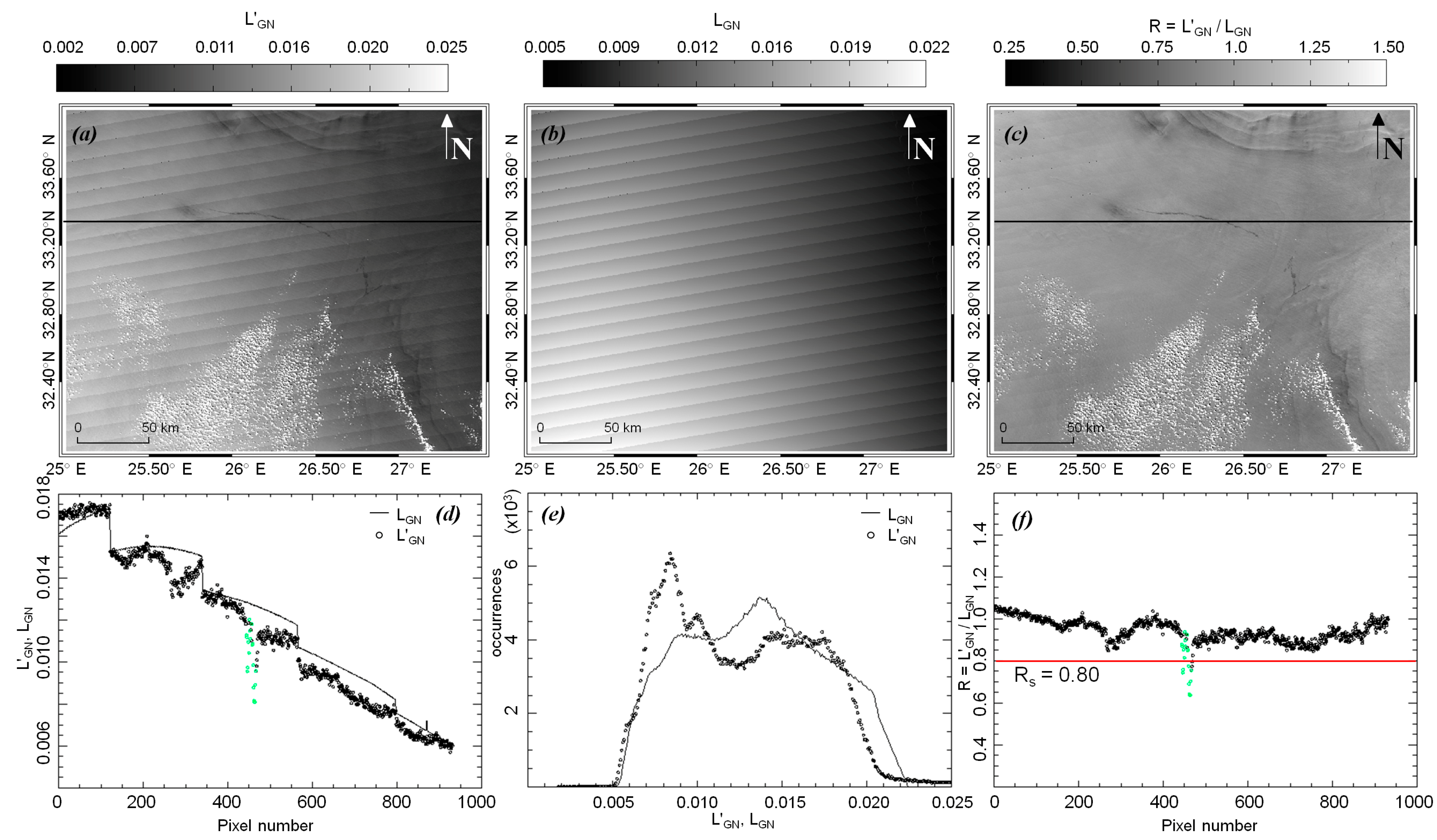
4.1. Evaluation of LGN, L'GN and R



4.2. Oil Spill Separation Index


| Scene | Rs (L'GN/LGN) (Positive Contrast) | Rs (L'GN/LGN) (Negative Contrast) | LGN | L'GN | Glint Angle α | Solar Zenith Angle θ 0 | Sensor Zenith Angle θ | Sun-Sensor Azimuth Difference Δϕ | Wind Speed |
|---|---|---|---|---|---|---|---|---|---|
| (°) | (°) | (°) | (°) | (m/s) | |||||
| 1 | 1.15 | ----- | 0.074 | 0.100 | 10.00 | 18.17 | 18.32 | 147.71 | 2.18 |
| 2 | 1.10 | ----- | 0.060 | 0.070 | 10.55 | 20.14 | 20.70 | 149.51 | 3.23 |
| 3 | 1.02 | ----- | 0.035 | 0.035 | 15.32 | 20.17 | 6.20 | 147.30 | 4.62 |
| 4 | 1.05 | ----- | 0.044 | 0.045 | 13.18 | 21.36 | 16.95 | 141.50 | 3.56 |
| 5 | 1.20 | ----- | 0.10 | 0.150 | 5.32 | 15.91 | 15.54 | 164.68 | 2.79 |
| 6 | ----- | 0.80 | 0.012 | 0.010 | 24.13 | 29.41 | 8.61 | 134.52 | 5.72 |
| 7 | 1.12 | ----- | 0.067 | 0.075 | 9.07 | 17.42 | 25.32 | 167.75 | 3.97 |
| 7 bis | ----- | 0.75 | 0.025 | 0.018 | 17.07 | 16.25 | 32.97 | 171.35 | 2.32 |
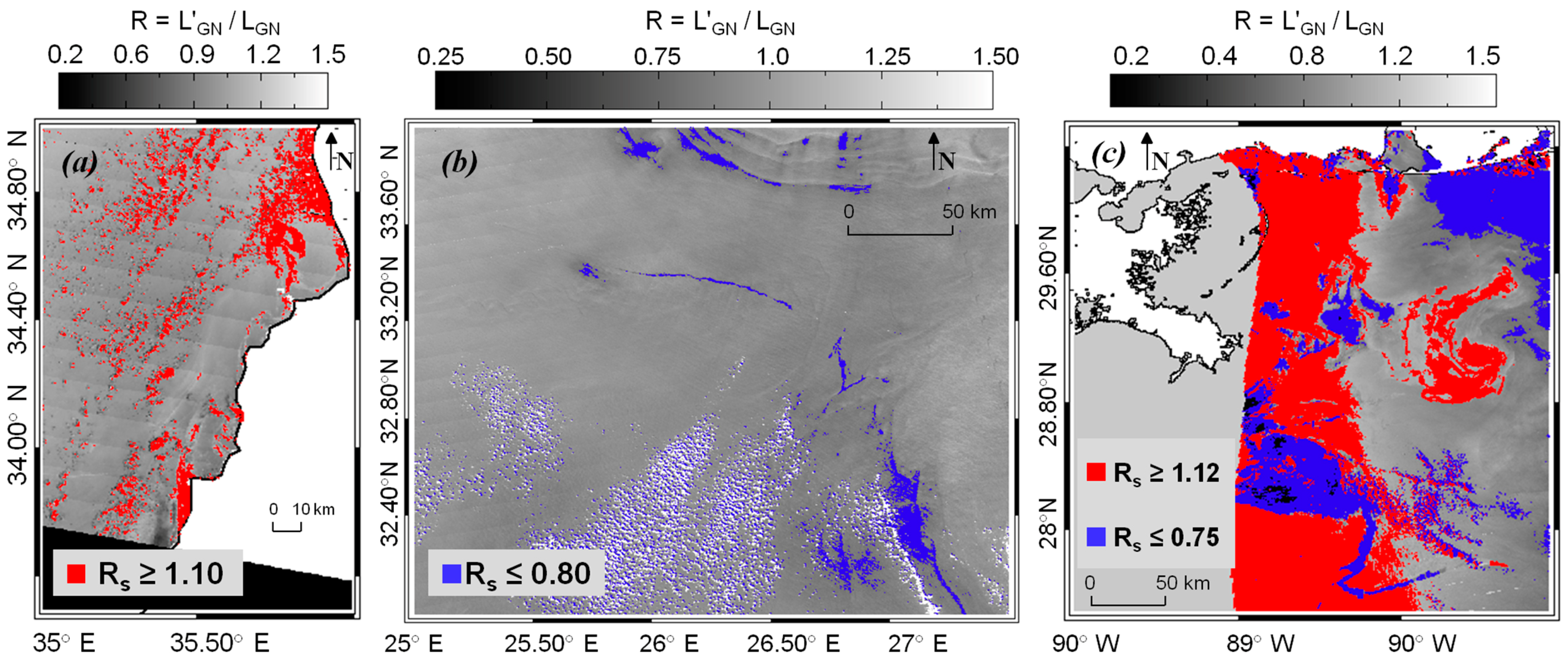
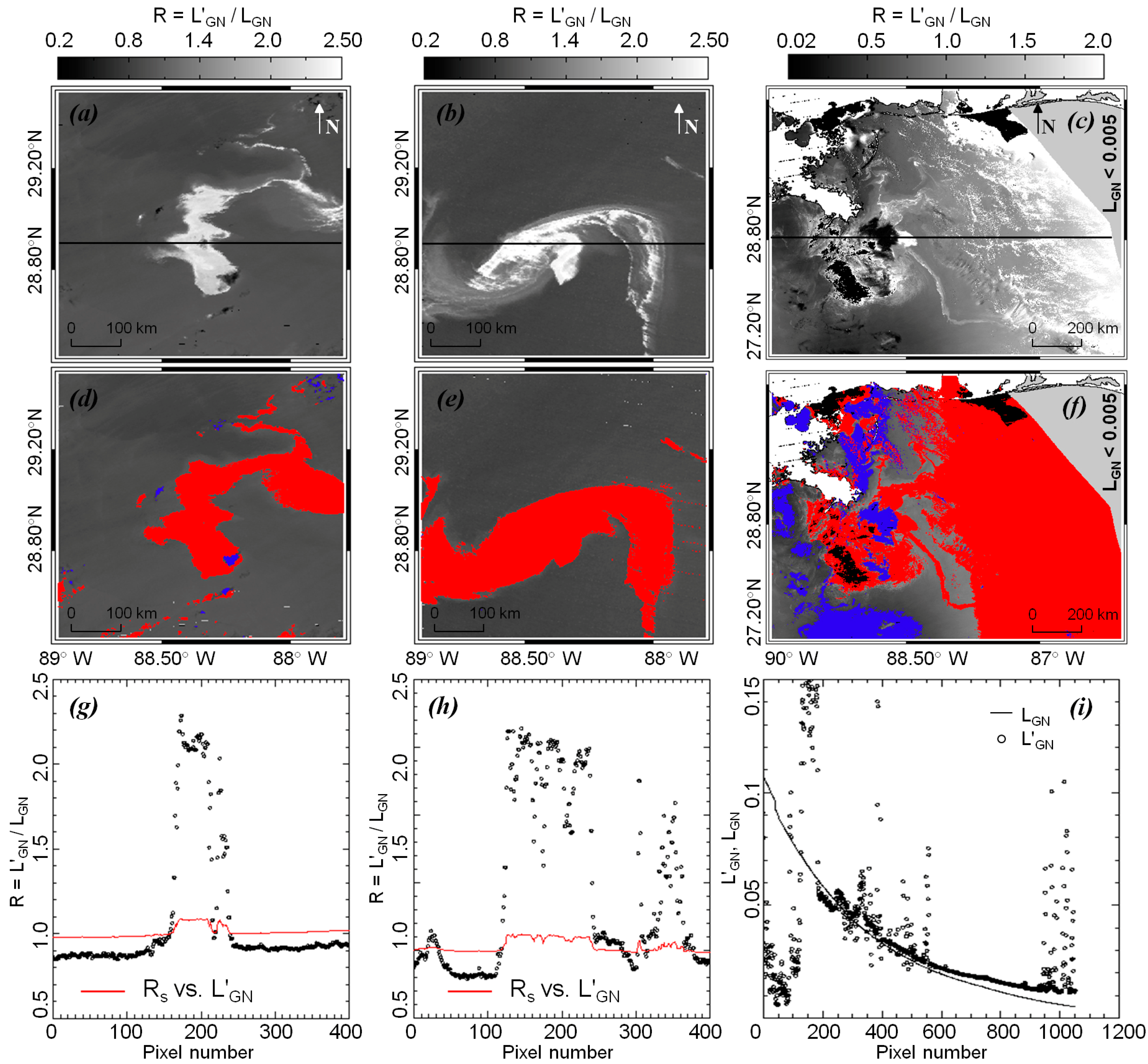
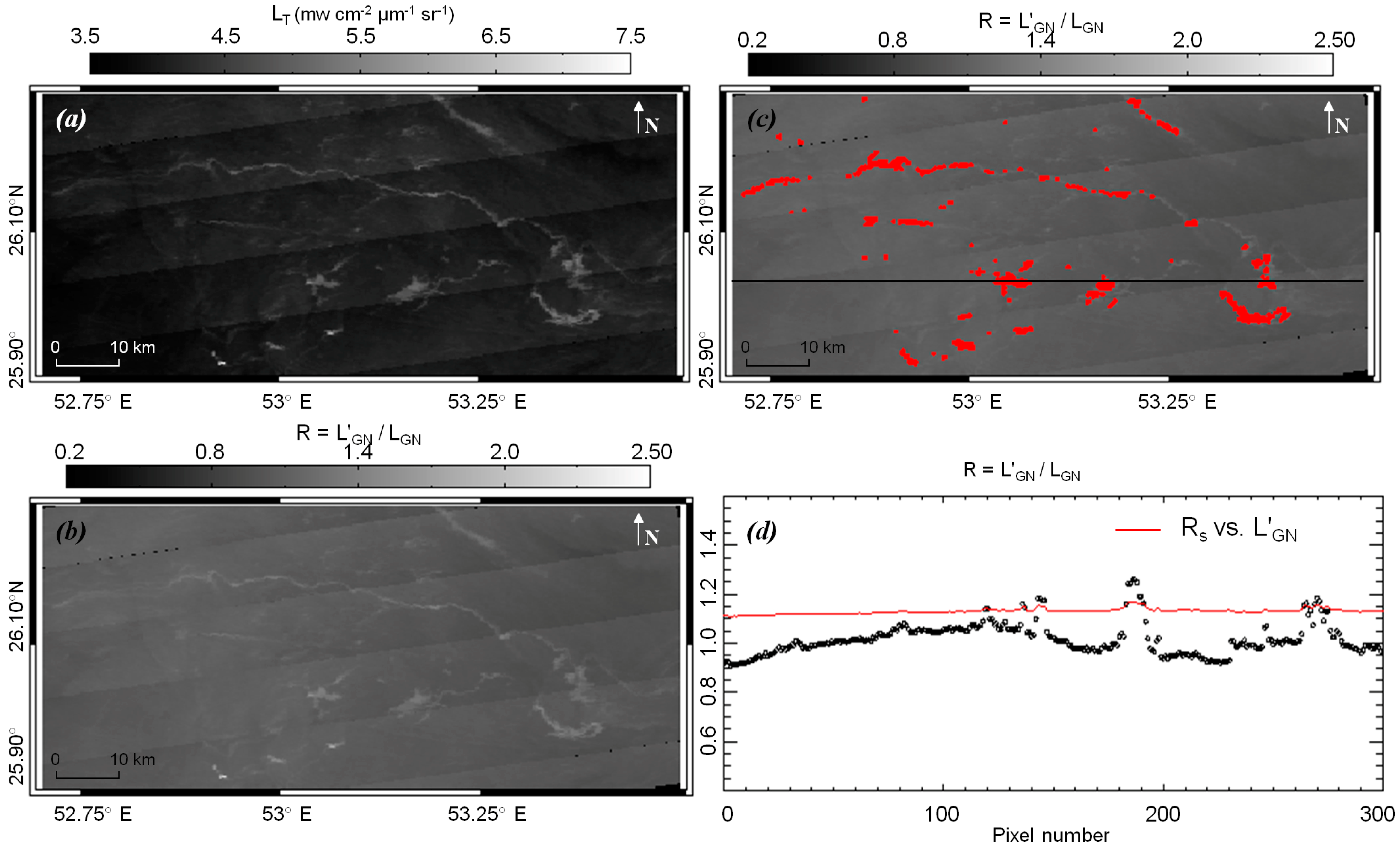
4.3. Application
- (1)
- extracts glint radiance L'GN, R and glint angle α;
- (2)
- (3)
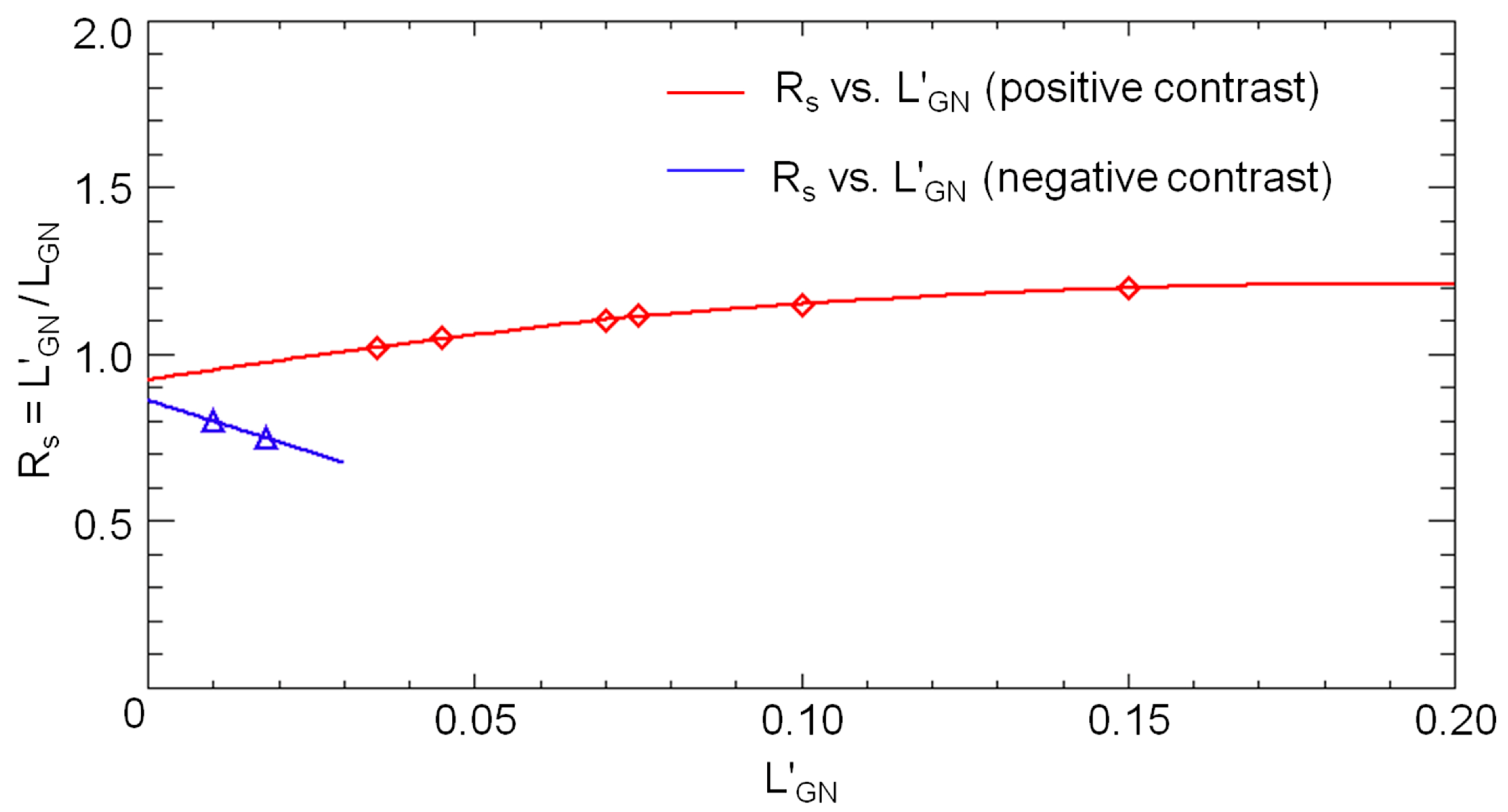
- finds the threshold Rs value according to the red (blue) curve of Figure 6 if α < 12° (α > 17°), since positive (negative) oil-water contrast is expected; for 12° < α < 17°, the two Rs values, relative to both curves, are considered;
- (4)
- compares R with the Rs(L'GN) value for the proper contrast case; two comparisons are made for 12° < α < 17°;
- (5)
- if R > Rs (positive contrast case, red curve of Figure 6) or R < Rs (negative contrast case, blue curve of Figure 6), then the pixel is classified as a probable oil spill pixel. In the 12° < α < 17° case, a pixel is classified as a probable spill, whether R > Rs of the red curve or R < Rs of the blue curve, since both positive and negative oil-water contrast can coexist. The pixels in Figure 7 and Figure 8 with 12° < α < 17° and R > Rs (red curve) were colored red, while those with R < Rs (blue curve) were colored blue.


5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Brown, C.E.; Fingas, M.F. New space-borne sensors for oil spill response. Int. Oil Spill Conf. Proc. 2001, 2001, 911–916. [Google Scholar] [CrossRef]
- Ferraro, G.; Bernardini, A.; David, M.; Meyer-Roux, S.; Muellenhoff, O.; Perkovic, M.; Tarchi, D.; Topouzelis, K. Towards an operational use of space imagery for oil pollution monitoring in the mediterranean basin: A demonstration in the adriatic sea. Mar. Pollut. Bull. 2007, 54, 403–422. [Google Scholar] [CrossRef] [PubMed]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Wahl, T.; Skøelv, A.; Andersen, J.H.S. Practical use of ERS-1 SAR images in pollution monitoring. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS’94)—Surface and Atmospheric Remote Sensing: Technologies, Data Analysis and Interpretation, Pasadena, CA, USA, 8–12 August 1994; Volume 1954, pp. 1954–1956.
- Zhao, J.; Temimi, M.; Ghedira, H.; Hu, C. Exploring the potential of optical remote sensing for oil spill detection in shallow coastal waters—A case study in the Arabian Gulf. Opt. Express 2014, 22, 13755–13772. [Google Scholar] [CrossRef] [PubMed]
- De Dominicis, M.; Pinardi, N.; Zodiatis, G.; Lardner, R. Medslik-II, a Lagrangian marine surface oil spill model for short-term forecasting—Part 1: Theory. Geosci. Model Dev. 2013, 6, 1851–1869. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Hu, C.; Zheng, L. Trajectory forecast as a rapid response to the deepwater horizon oil spill. In Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise; Geophysical Monograph Series; Volume 195, American Geophysical Union: Washington, DC, USA, 2011. [Google Scholar] [CrossRef]
- The Medess4ms European Project. Available online: http://www.medess4ms.eu/ (accessed on 1 February 2015).
- Hu, C.; Müller-Karger, F.E.; Taylor, C.; Myhre, D.; Murch, B.; Odriozola, A.L.; Godoy, G. MODIS detects oil spills in Lake Maracaibo, Venezuela. Eos Trans. AGU 2003, 84, 313–319. [Google Scholar] [CrossRef]
- Hu, C.; Li, X.; Pichel, W.G.; Muller-Karger, F.E. Detection of natural oil slicks in the NW Gulf of Mexico using MODIS imagery. Geophys. Res. Lett. 2009, 36, L01604. [Google Scholar] [CrossRef]
- Bulgarelli, B.; Djavidnia, S. On MODIS retrieval of oil spill spectral properties in the marine environment. IEEE Geosci. Remote Sens. Lett. 2012, 9, 398–402. [Google Scholar] [CrossRef]
- Adamo, M.; de Carolis, G.; de Pasquale, V.; Pasquariello, G. Detection and tracking of oil slicks on sun-glittered visible and near infrared satellite imagery. Int. J. Remote Sens. 2009, 30, 6403–6427. [Google Scholar] [CrossRef]
- Byfield, V.; Boxall, S.R. Thickness estimates and classification of surface oil using passive sensing at visible and near-infrared wavelengths. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium (IGARSS’99), Hanburg, Germany, 28 June–2 July 1999; Volume 1473, pp. 1475–1477.
- Otremba, Z. The impact on the reflectance in vis of a type of crude oil film floating on the water surface. Opt. Express 2000, 7, 129–134. [Google Scholar] [CrossRef] [PubMed]
- Otremba, Z.; Piskozub, J. Modelling of the optical contrast of an oil film on a sea surface. Opt. Express 2001, 9, 411–416. [Google Scholar] [CrossRef] [PubMed]
- Otremba, Z.; Piskozub, J. Modeling the remotely sensed optical contrast caused by oil suspended in the sea water column. Opt. Express 2003, 11, 2–6. [Google Scholar] [CrossRef] [PubMed]
- Otremba, Z.; Piskozub, J. Modelling the bidirectional reflectance distribution function (BRDF) of seawater polluted by an oil film. Opt. Express 2004, 12, 1671–1676. [Google Scholar] [CrossRef] [PubMed]
- Kay, S.; Hedley, J.; Lavender, S. Sun glint estimation in marine satellite images: A comparison of results from calculation and radiative transfer modeling. Appl. Opt. 2013, 52, 5631–5639. [Google Scholar] [CrossRef] [PubMed]
- Cox, C.; Munk, W. Measurement of the roughness of the sea surface from photographs of the sun’s glitter. J. Opt. Soc. Am. 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Shaban, A.; Hamzé, M.; El-Baz, F.; Ghoneim, E. Characterization of an oil spill along the lebanese coast by satellite images. Environ. Forensics 2009, 10, 51–59. [Google Scholar] [CrossRef]
- Liu, Y.; MacFadyen, A.; Ji, Z.G.; Weisberg, R.H. Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise; Geophysical Monograph Series; American Geophysical Union: Washington, DC, USA, 2011; Volume 195, p. 271. [Google Scholar] [CrossRef]
- Falcini, F.; Jerolmack, J.D.; Buongiorno Nardelli, B. Mississippi river and sea surface height effects on oil slick migration. PLoS One 2012, 7. [Google Scholar] [CrossRef] [PubMed]
- Ottaviani, M.; Cairns, B.; Chowdhary, J.; van Diedenhoven, B.; Knobelspiesse, K.; Hostetler, C.; Ferrare, R.; Burton, S.; Hair, J.; Obland, M.D.; et al. Polarimetric retrievals of surface and cirrus clouds properties in the region affected by the deepwater horizon oil spill. Remote Sens. Environ. 2012, 121, 389–403. [Google Scholar] [CrossRef]
- Level 1 and Atmosphere Archive and Distribution System (LAADS). Available online: http://ladsweb.nascom.nasa.gov/ (accessed on 1 February 2015).
- Gordon, H.R.; Wang, M. Retrieval of water-leaving radiance and aerosol optical thickness over the oceans with seawifs: A preliminary algorithm. Appl. Opt. 1994, 33, 443–452. [Google Scholar] [CrossRef] [PubMed]
- Koepke, P. Effective reflectance of oceanic whitecaps. Appl. Opt. 1984, 23, 1816–1824. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wang, M. Evaluation of sun glint models using MODIS measurements. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 492–506. [Google Scholar] [CrossRef]
- Wang, M.; Bailey, S.W. Correction of sun glint contamination on the seawifs ocean and atmosphere products. Appl. Opt. 2001, 40, 4790–4798. [Google Scholar] [CrossRef]
- Ahmad, Z.; Franz, B.A.; McClain, C.R.; Kwiatkowska, E.J.; Werdell, J.; Shettle, E.P.; Holben, B.N. New aerosol models for the retrieval of aerosol optical thickness and normalized water-leaving radiances from the seawifs and modis sensors over coastal regions and open oceans. Appl. Opt. 2010, 49, 5545–5560. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Shi, W. Cloud masking for ocean color data processing in the coastal regions. IEEE Trans.Geosci. Remote Sens. 2006, 44, 3196–3105. [Google Scholar] [CrossRef]
- Ottaviani, M.; Spurr, R.; Stamnes, K.; Li, W.; Su, W.; Wiscombe, W. Improving the description of sunglint for accurate prediction of remotely sensed radiances. J. Quant. Spectrosc. Radiat. Transf. 2008, 109, 2364–2375. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/)
Share and Cite
Pisano, A.; Bignami, F.; Santoleri, R. Oil Spill Detection in Glint-Contaminated Near-Infrared MODIS Imagery. Remote Sens. 2015, 7, 1112-1134. https://doi.org/10.3390/rs70101112
Pisano A, Bignami F, Santoleri R. Oil Spill Detection in Glint-Contaminated Near-Infrared MODIS Imagery. Remote Sensing. 2015; 7(1):1112-1134. https://doi.org/10.3390/rs70101112
Chicago/Turabian StylePisano, Andrea, Francesco Bignami, and Rosalia Santoleri. 2015. "Oil Spill Detection in Glint-Contaminated Near-Infrared MODIS Imagery" Remote Sensing 7, no. 1: 1112-1134. https://doi.org/10.3390/rs70101112
APA StylePisano, A., Bignami, F., & Santoleri, R. (2015). Oil Spill Detection in Glint-Contaminated Near-Infrared MODIS Imagery. Remote Sensing, 7(1), 1112-1134. https://doi.org/10.3390/rs70101112