
Multi-Image and Multi-Sensor Change Detection for Long-Term Monitoring of Arid Environments With Landsat Series



Abstract
:
1. Introduction
- developing a long term monitoring of the expansion of cultivation at regional scale (regardless the crop species), which may contribute towards defining a sustainable development strategy for the area and for regions with similar characteristics, which are not uncommon in arid climates;
- proposing a methodology for change detection that is cost effective, easy to implement in an automated processing chain and sufficiently accurate;
- evaluating how change detection can be affected by the differences in radiometric and spectral characteristics between Landsat sensors;
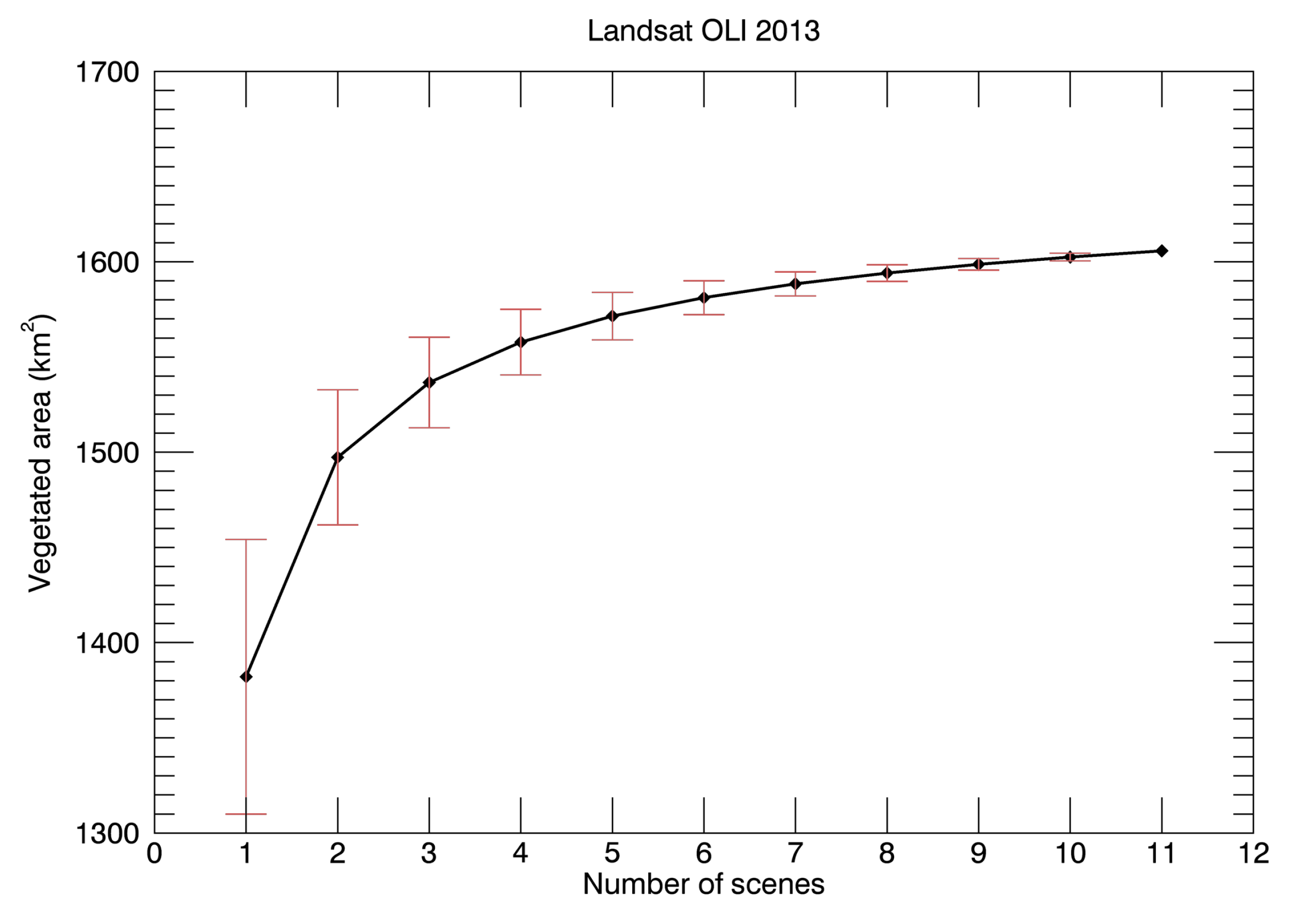
- assessing the improvements in the detection of cultivated areas which can be obtained using a number of images to produce the classification for a specific year.
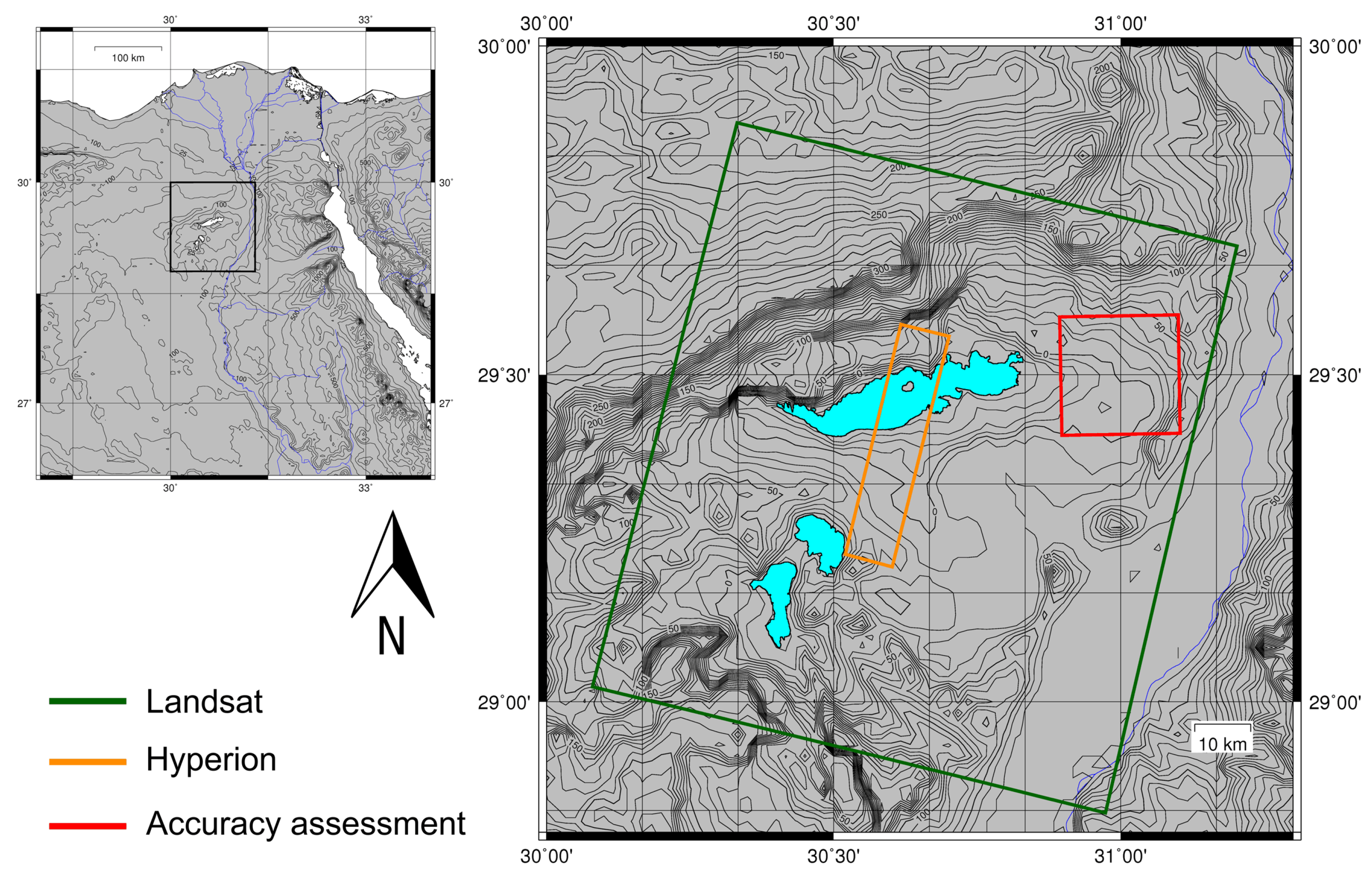
2. Study Area
3. Materials
3.1. Hyperspectral Data

3.2. Landsat Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jan | Feb | Mar | Apr | May | Jun | Jul | Aug | Sep | Oct | Nov | Dec | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1987 | TM | TM | TM | TM | TM | TM | ||||||
| 1998 | TM | TM | TM | TM | TM | |||||||
| 1999 | TM | |||||||||||
| 2003 | ETM | ETM | TM | TM | TM | |||||||
| 2013 | OLI | OLI | OLI | OLI | OLI | OLI | OLI | OLI | ||||
| 2014 | OLI |
3.3. High Resolution Data
4. Methods
4.1. Landsat Sensor Comparison
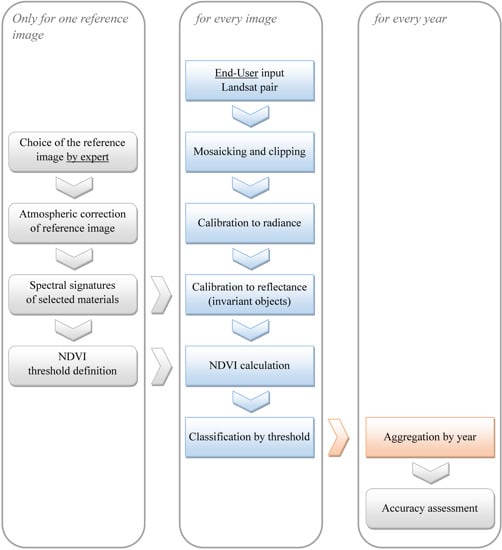
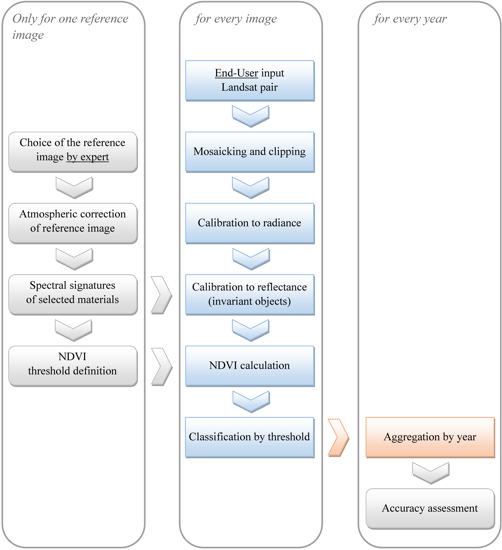
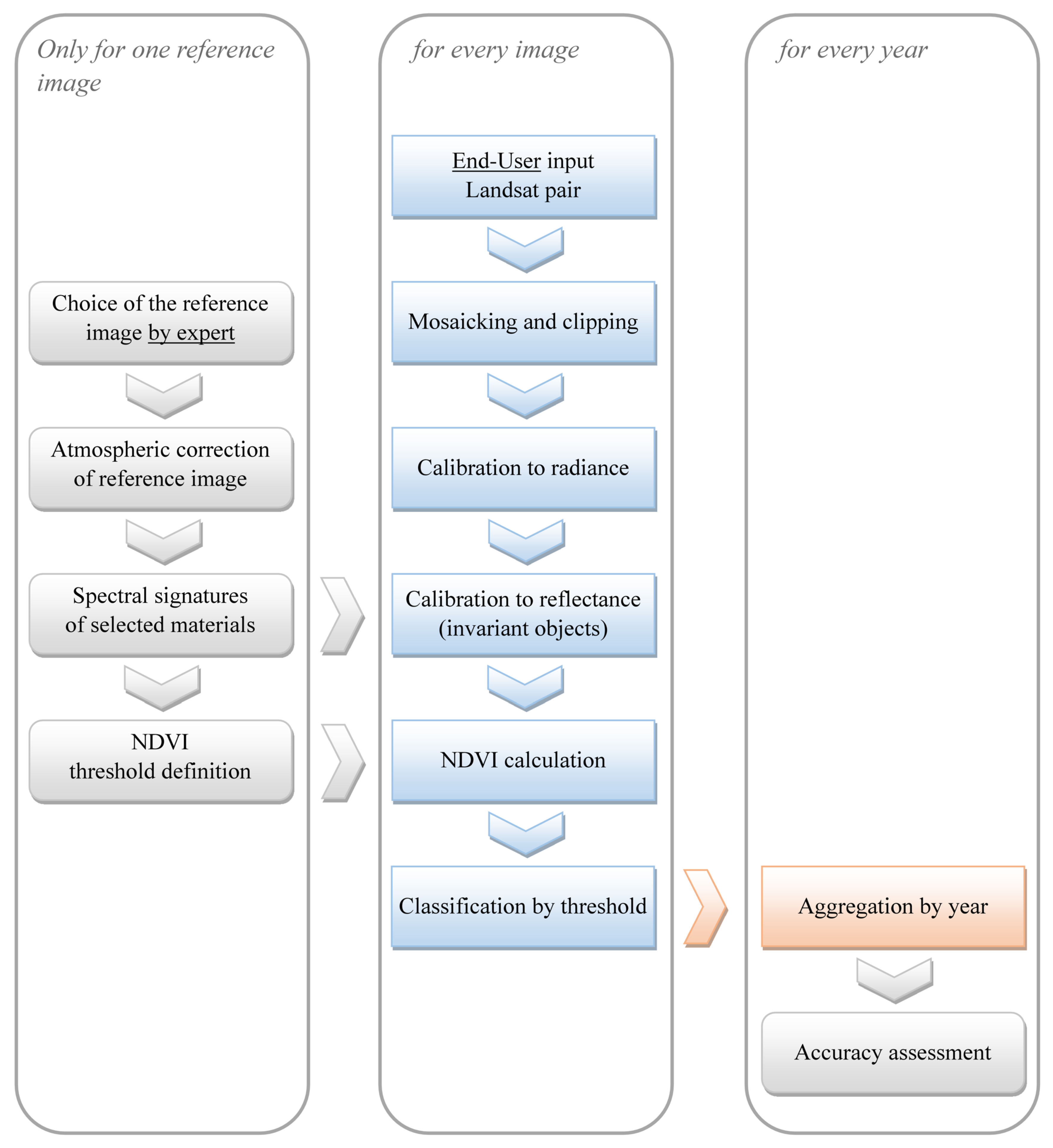
4.2. Change Detection


4.3. Accuracy Assessment


5. Results
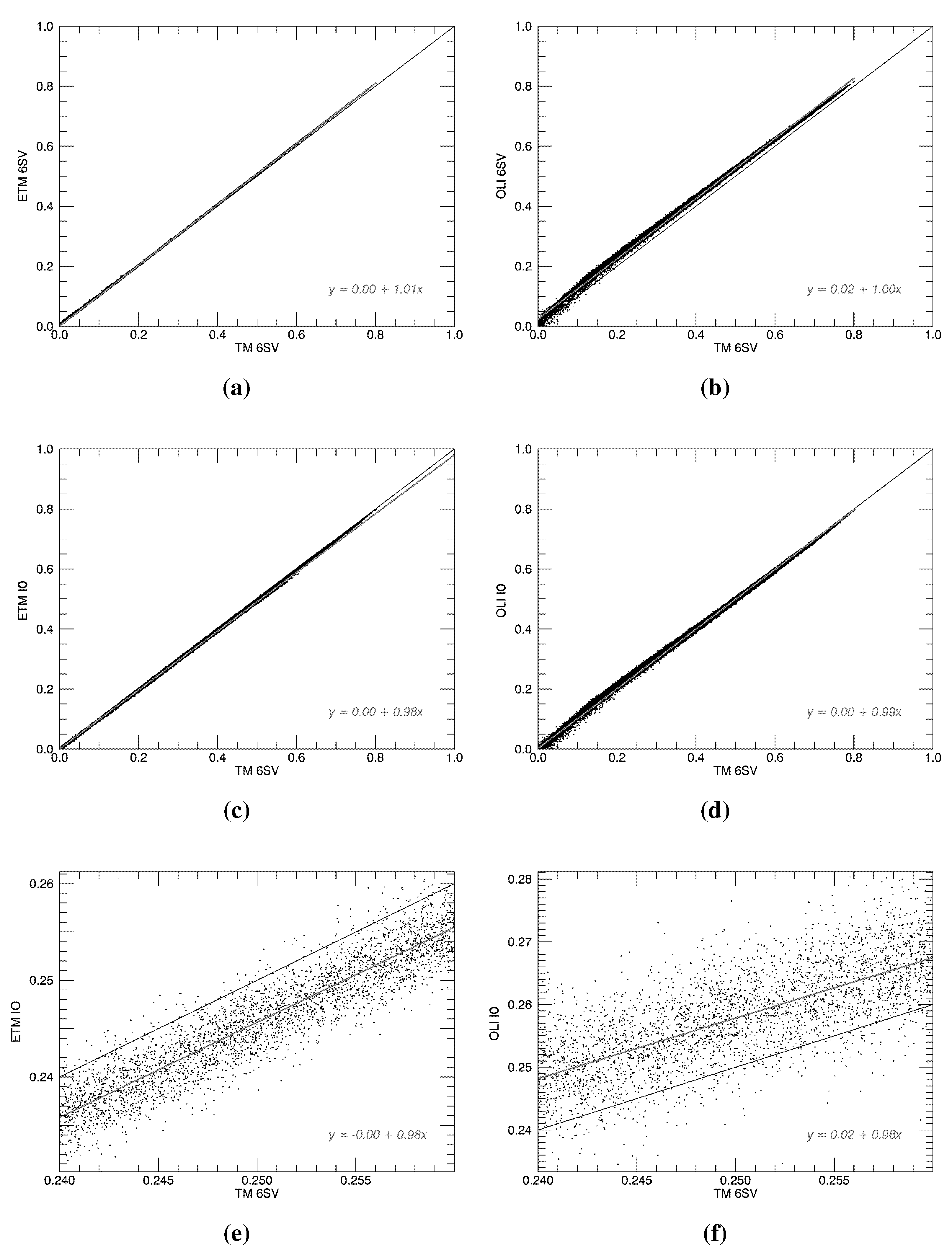
5.1. Landsat Sensor Comparison
- Considering the behaviour of the NDVI within the interval between zero and one, the correlation between the simulated TM and ETM values is very high and the regression line of the scatter plot is quite coincident with the identity line (Figure 5a). This means that the spectral differences between the NIR and red bands of the two sensors are negligible for a large number of practical applications.
- The linear correlation between simulated TM and OLI values is still high (Figure 5b), even if lower than the one between TM and ETM. However, the intercept of the regression line was found to be about 0.02. The plot appears more scattered, therefore, if an interval of NDVI values in the TM domain is selected, the corresponding interval of values in the OLI domain will be broader. In this case, spectral differences can affect significantly applications which exploit vegetation indexes.
- The use of the invariant object method to perform the relative atmospheric correction of a OLI image, assuming a TM image as reference, seems to accommodate the global bias due to the different radiometry of the two sensors (Figure 5d). However, if the correlation is evaluated within a narrower interval (Figure 5f), the regression line diverges significantly from the identity line. This result may be relevant for processing chains involving thresholds, suggesting that threshold values need to be adjusted, when moving from TM to OLI images.
5.2. Change Detection
| Year | Total Area | Class 1 | Class 2 | Class 3 | Class 4 | Class 5 | Class 6 or Higher |
|---|---|---|---|---|---|---|---|
| km2 | % | % | % | % | % | % | |
| 1987 | 1500 | 3 | 4 | 7 | 12 | 27 | 47 |
| 1998 | 1504 | 5 | 5 | 11 | 22 | 41 | 16 |
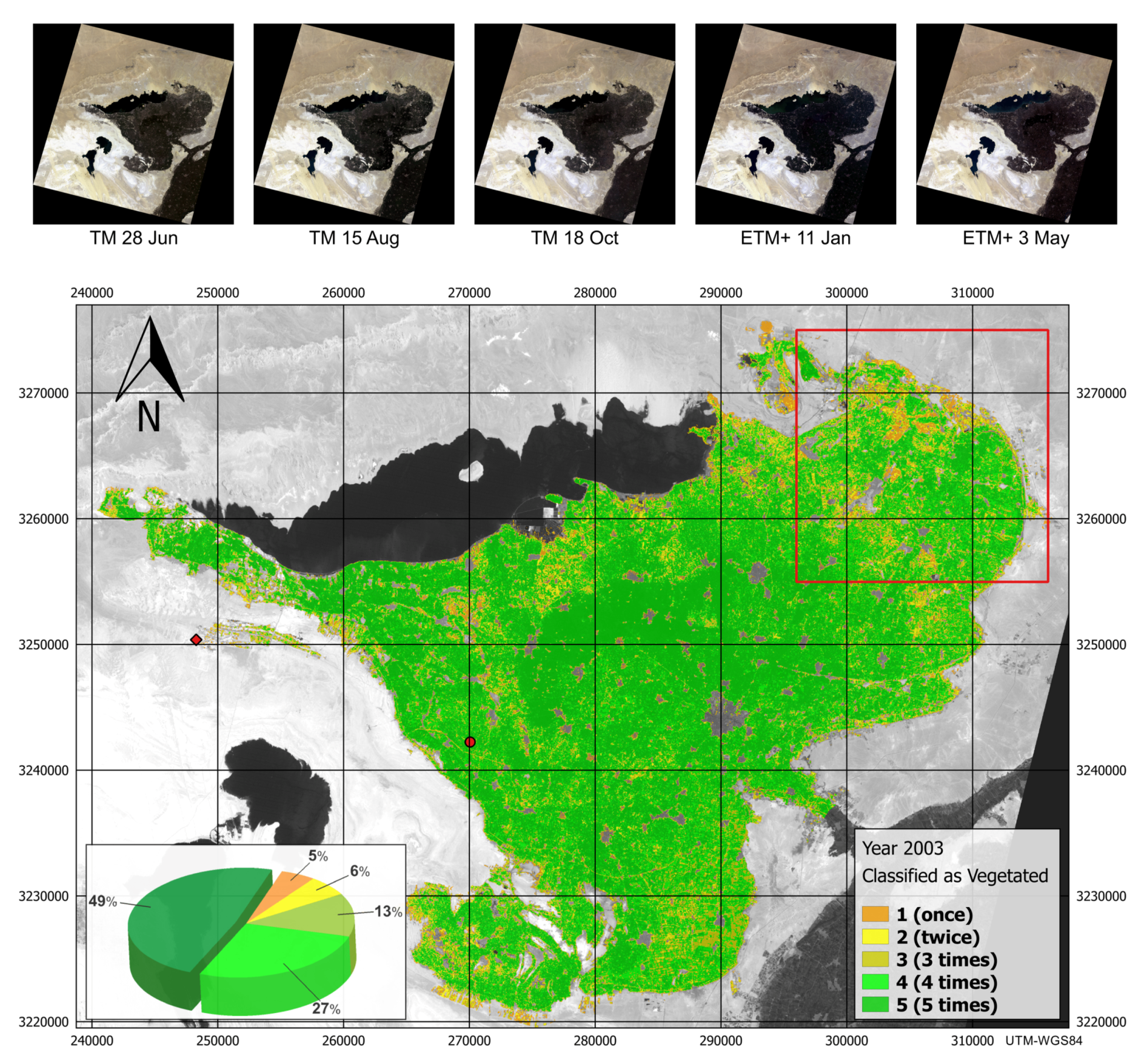
| 2003 | 1528 | 5 | 6 | 13 | 27 | 49 | - |
| 2013 | 1589 | 3 | 3 | 5 | 7 | 17 | 65 |
| 2013b | 1601 | 2 | 2 | 2 | 2 | 2 | 90 |


5.3. Accuracy Assessment
| V | N | ||
|---|---|---|---|
| V | 0.5362 | 0.0105 | 0.55 |
| N | 0.0483 | 0.4050 | 0.45 |
| 0.58 | 0.42 | 1.00 |
| V | N | ||
|---|---|---|---|
| V | 0.5572 | 0.0223 | 0.58 |
| N | 0.0280 | 0.3925 | 0.42 |
| 0.59 | 0.41 | 1.00 |
| VV | NN | VN | NV | ||
|---|---|---|---|---|---|
| VV | 0.5057 | 0.0081 | 0.0012 | 0.0000 | 0.52 |
| NN | 0.0093 | 0.3527 | 0.0175 | 0.0093 | 0.39 |
| VN | 0.0093 | 0.0024 | 0.0199 | 0.0000 | 0.03 |
| NV | 0.0215 | 0.0130 | 0.0000 | 0.0300 | 0.06 |
| 0.55 | 0.38 | 0.04 | 0.04 | 1.00 |
6. Discussion

7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The next Landsat satellite: The Landsat data continuity mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef]
- Roy, D.; Wulder, M.; Loveland, T.; Woodcock, C.; Allen, R.; Anderson, M.; Helder, D.; Irons, J.; Johnson, D.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Li, P.; Jiang, L.; Feng, Z. Cross-comparison of vegetation indices derived from Landsat-7 Enhanced Thematic Mapper Plus (ETM+) and Landsat-8 Operational Land Imager (OLI) sensors. Remote Sens. 2014, 6, 310–329. [Google Scholar] [CrossRef]
- Singh, A. Digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Canty, M.J. Image Analysis, Classification, and Change Detection in Remote Sensing: With Algorithms for ENVI/IDL, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Almutairi, A.; Warner, T.A. Change Detection Accuracy and Image Properties: A Study Using Simulated Data. Remote Sens. 2010, 2, 1508–1529. [Google Scholar] [CrossRef]
- Hecheltjen, A.; Thonfeld, F.; Menz, G. Recent advances in remote sensing change detection—A review. In Land Use and Land Cover Mapping in Europe; Manakos, I., Braun, M., Eds.; Springer Netherlands: Dordrecht, The Netherlands, 2014; pp. 145–178. [Google Scholar]
- Lu, D.; Mausel, P.; Brondízio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2401. [Google Scholar] [CrossRef]
- Coppin, P.; Jonckheere, I.; Nackaerts, K.; Muys, B.; Lambin, E. Review ArticleDigital change detection methods in ecosystem monitoring: A review. Int. J. Remote Sens. 2004, 25, 1565–1596. [Google Scholar] [CrossRef]
- Hobbs, R.J. Remote sensing of spatial and temporal dynamics of vegetation. In Remote Sensing of Biosphere Functioning; Hobbs, R.J., Mooney, H.A., Eds.; Springer: New York, NY, USA, 1990; pp. 203–219. [Google Scholar]
- Ramzy, Y.H. Sustainable tourism development in Al Fayoum Oasis, Egypt. In Ecosystem and Sustainable Development IX; Marinov, A.M., Brebbia, C.A., Eds.; WIT Press: England, UK, 2013; pp. 164–173. [Google Scholar]
- Bitelli, G.; Curzi, P.V.; Mandanici, E. Morphological and lithological aspects in the northeastern Libyan desert by remote sensing. Proc. SPIE 2009. [Google Scholar] [CrossRef]
- Khattab, A.F.; Abdel Azim, R.; El Masry, S. Water Trading in Fayoum and Frafra Oasis; Technical Report 72; United States Agency for International Development: Cairo, Egypt, 2003.
- Ishak, M.M.; Abdel Malek, S.A. Some ecological aspects of lake Qarun, Fayoum, Egypt. Part I: Physico-chemical environment. Hydrobiologia 1980, 74, 173–178. [Google Scholar] [CrossRef]
- El Shabrawy, G.M.; Dumont, H.J. The Fayum depression and its lakes. In The Nile. Origin, Environments, Limnology and Human Use; Dumont, H.J., Ed.; Springer: New York, NY, USA, 2009; pp. 95–124. [Google Scholar]
- Hereher, M.E. Assessing the dynamics of El-Rayan lakes, Egypt, using remote sensing techniques. Arab. J. Geosci. 2015, 8, 1931–1938. [Google Scholar] [CrossRef]
- Hussein, H.; Amer, R.; Gaballah, A.; Refaat, Y.; Abdel-Wahab, A. Polluton monitoring for Lake Qarun. Adv. Environ. Biol. 2008, 2, 70–80. [Google Scholar]
- Bitelli, G.; Curzi, P.V.; Dinelli, E.; Mandanici, E. Empirical model for salinity assessment on lacustrine and coastal waters by remote sensing. Proc. SPIE 2011. [Google Scholar] [CrossRef]
- Ali, R.R.; Abdel Kawy, W.A.M. Land degradation risk assessment of El Fayoum depression, Egypt. Arab. J. Geosci. 2013, 6, 2767–2776. [Google Scholar] [CrossRef]
- Ungar, S.G.; Pearlman, J.S.; Mendenhall, J.A.; Reuter, D. Overview of the Earth Observing One (EO-1) Mission. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1149–1159. [Google Scholar] [CrossRef]
- Stehman, S.V. Sampling designs for accuracy assessment of land cover. Int. J. Remote Sens. 2009, 30, 5243–5272. [Google Scholar] [CrossRef]
- Abd Elgawad, M.; Shendi, M.M.; Sofi, D.M.; Abdurrahman, H.A.; Ahmed, A.M. Geographical Distribution of Soil Salinity, Alkalinity, and Calcicity Within Fayoum and Tamia Districts, Fayoum Governorate, Egypt. In Developments in Soil Salinity Assessment and Reclamation; Shahid, S.A., Abdelfattah, M.A., Taha, F.K., Eds.; Springer: Dordrecht, The Netherlands, 2013; pp. 219–236. [Google Scholar]
- Liao, L.B.; Jarecke, P.J.; Gleichauf, D.A.; Hedman, T.R. Performance characterization of the Hyperion Imaging Spectrometer instrument. SPIE Proc. 2000, 4135, 264–275. [Google Scholar]
- Jupp, D.L.B.; Datt, B. Evaluation of Hyperion Performance at Australian Hyperspectral Calibration and Validation Sites; Technical Report; CSIRO Earth Observation Centre Report: Canberra, Australia, 2004. [Google Scholar]
- Mandanici, E. Implementation of Hyperion sensor routine in 6SV radiative transfer code. In Proceedings of the Hyperspectral Workshop 2010, Frascati, Italy, 17–19 March 2010.
- Liang, S. Quantitative Remote Sensing of Land Surfaces; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Gutman, G.; Byrnes, R.; Masek, J.; Covington, S.; Justice, C.; Franks, S.; Headley, R. Towards Monitoring Land-Cover and Land-Use Changes at a Global Scale: The Global Land Survey 2005. Photogr. Eng. Remote Sens. 2008, 74, 6–10. [Google Scholar]
- Kotchenova, S.Y.; Vermote, E.F.; Matarrese, R.; Klemm, Frank J., Jr. Validation of a vector version of the 6S radiative transfer code for atmospheric correction of satellite data. Part I: Path radiance. Appl. Opt. 2006, 45, 6762–6774. [Google Scholar] [CrossRef] [PubMed]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Stehman, S.V.; Czaplewski, R.L. Design and Analysis for Thematic Map Accuracy Assessment: Fundamental Principles. Remote Sens. Environ. 1998, 64, 331–344. [Google Scholar] [CrossRef]
- Särndal, C.E.; Swensson, B.; Wretman, J. Model Assisted Survey Sampling; Springer: Berlin, Germany, 1992. [Google Scholar]
- Pontius, R.G., Jr.; Millones, M. Death to Kappa: birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Shalaby, A.; Tateishi, R. Remote sensing and GIS for mapping and monitoring land cover and land-use changes in the Northwestern coastal zone of Egypt. Appl. Geogr. 2007, 27, 28–41. [Google Scholar] [CrossRef]
- El Kawy, O.R.A.; Rød, J.K.; Ismail, H.A.; Suliman, A.S. Land use and land cover change detection in the western Nile delta of Egypt using remote sensing data. Appl. Geogr. 2011, 31, 483–494. [Google Scholar] [CrossRef]
- Hereher, M.E. The status of Egypt’s agricultural lands using MODIS Aqua data. Egypt. J. Remote Sens. Space Sci. 2013, 16, 83–89. [Google Scholar] [CrossRef]
- Pax Lenney, M.; Woodcock, C.E.; Collins, J.B.; Hamdi, H. The status of agricultural lands in Egypt: The use of multitemporal NDVI features derived from landsat TM. Remote Sens. Environ. 1996, 56, 8–20. [Google Scholar] [CrossRef]
- Pax Lenney, M.; Woodcock, C.E. Monitoring agricultural lands in Egypt with multitemporal Landsat TM imagery: How many images are needed? Remote Sens. Environ. 1997, 59, 522–529. [Google Scholar] [CrossRef]
- Knudby, A.; Nordlund, L.M.; Palmqvist, G.; Wikström, K.; Koliji, A.; Lindborg, R.; Gullström, M. Using multiple Landsat scenes in an ensemble classifier reduces classification error in a stable nearshore environment. Int. J. Appl. Earth Observ. Geoinf. 2014, 28, 90–101. [Google Scholar] [CrossRef]
- Zanchetta, A.; Bitelli, G.; Karnieli, A. Tasselled Cap transform for change detection in the drylands: Findings for SPOT and Landsat satellites with FOSS tools. Proc. SPIE 2015. [Google Scholar] [CrossRef]
- Drusch, M.; del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mandanici, E.; Bitelli, G. Multi-Image and Multi-Sensor Change Detection for Long-Term Monitoring of Arid Environments With Landsat Series. Remote Sens. 2015, 7, 14019-14038. https://doi.org/10.3390/rs71014019
Mandanici E, Bitelli G. Multi-Image and Multi-Sensor Change Detection for Long-Term Monitoring of Arid Environments With Landsat Series. Remote Sensing. 2015; 7(10):14019-14038. https://doi.org/10.3390/rs71014019
Chicago/Turabian StyleMandanici, Emanuele, and Gabriele Bitelli. 2015. "Multi-Image and Multi-Sensor Change Detection for Long-Term Monitoring of Arid Environments With Landsat Series" Remote Sensing 7, no. 10: 14019-14038. https://doi.org/10.3390/rs71014019
APA StyleMandanici, E., & Bitelli, G. (2015). Multi-Image and Multi-Sensor Change Detection for Long-Term Monitoring of Arid Environments With Landsat Series. Remote Sensing, 7(10), 14019-14038. https://doi.org/10.3390/rs71014019