
Radiometric Inter-Calibration between Himawari-8 AHI and S-NPP VIIRS for the Solar Reflective Bands


Abstract
:
1. Introduction
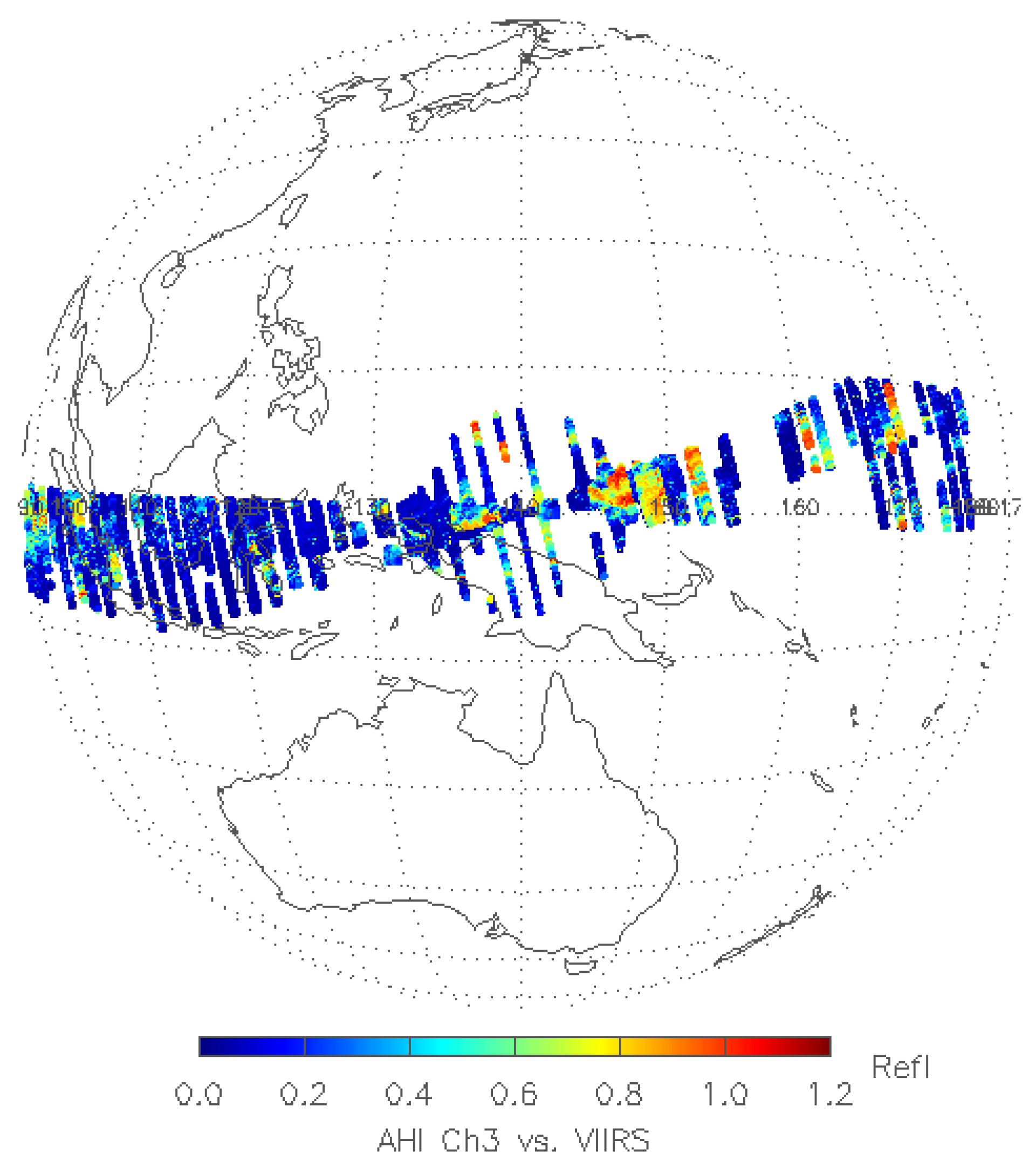
2. AHI and VIIRS Collocations
2.1. AHI and VIIRS VNIR Data
2.2. GEO-LEO Collocations
- The time difference between GEO and LEO observations is less than 5 min. This criterion is used to reduce the impact of atmospheric variations on the Top Of Atmosphere (TOA) reflectance, as well as to ensure similar solar illumination angles to reduce the BRDF impact.
- The cosine of viewing zenith angle difference between the GEO and LEO instrument is less than 1%. As the optical path is proportional to the cosine of the viewing zenith angle, this criterion is to ensure similar optical paths for the atmospheric absorption and scattering effects, as well as similar viewing zenith angles.
- To ensure the same targets observed by the two instruments, the spatial distance between the centers of each GEO and LEO collocated pairs is less than the nominal spatial resolution of the corresponding VIIRS band, that is, 375 m for the VIIRS I bands and 750 m for the VIIRS M bands.
- To reduce the computing time, all the AHI B1, 2, 3 and 4 images are degraded to 2-km spatial resolution by averaging the radiane and reflectance at every 2 pixels x 2 pixels (for AHI B1, 2 and 4) or 4 pixels x 4 pixels (for AHI B3). To match the AHI pixel spatial size, the arrays of 3 VIIRS pixels × 3 VIIRS pixels and 7 VIIRS pixels × 7 VIIRS pixels centered at the collocated pixel are considered as the spatially collocated VIIRS scenes for the M-band and I-band data, respectively. The mean values of 3 VIRS pixels x 3 and 7 VIIRS pixels x 7 pixels are used to simulate the AHI measurements. As the clouds may be moving within the time interval, the statistical information (mean and standard deviation) of the environmental (ENV) pixels, which are three times of the AHI pixel in size, and centered at the collocated pixels, are also archived for both AHI and VIIRS data.
3. Ray-Matching and Collocated DCC Methods
3.1. Ray-Matching Method
- CoV(ENV)VIIRS < 3%, CoV(ENV)AHI < 3% and CoV(FOV)VIIRS < 3%. FOV is the nominal spatial size (2 km) of AHI pixel used in this study, corresponding to the field-of-view (FOV) for B5 and B6.
- |φgeo − φleo| < 10°
3.2. Collocated DCC Method
- Brightness temperature (Tb) of AHI B13 (10.4 µm) and VIIRS M15 (10.7 µm) are less than 205 K. Selection of DCC pixels is sensitive to the Tb threshold [20]. Although both AHI B13 and VIIRS M15 are, in general, well-calibrated [1,12], in this study, the Tb threshold value of 205 K is applied to both instruments to reduce the possible impact of radiometric calibration difference at extremely cold DCC pixels.
- Standard deviation of Tb for VIIRS M15 FOV and ENV arrays are less than 1 K
- Standard deviation of Tb for AHI B13 ENV arrays are less than 1 K
- CoV of reflectance for VIIRS I1 FOV and ENV arrays are less than 3%
- Both the GEO and LEO viewing zenith angle (θv) and solar zenith angle (θs) should be less than 40°, that is, θv < 40° and θs < 40°
3.3. Spectral Band Adjustment Factor (SBAF)
4. Results and Discussions
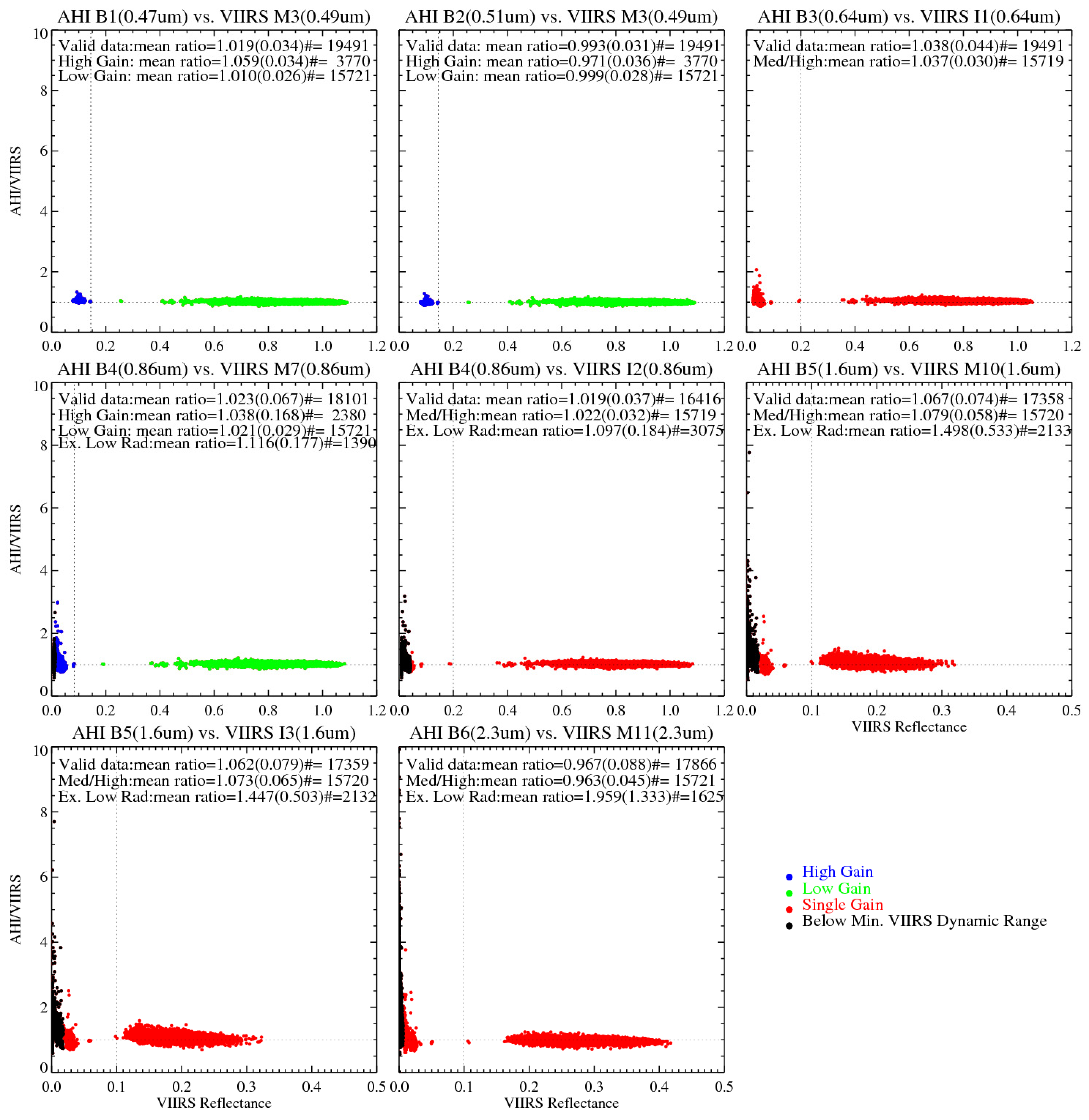
4.1. Ray-Matching Inter-Calibration: Large Measured Radiance/Reflectance Range
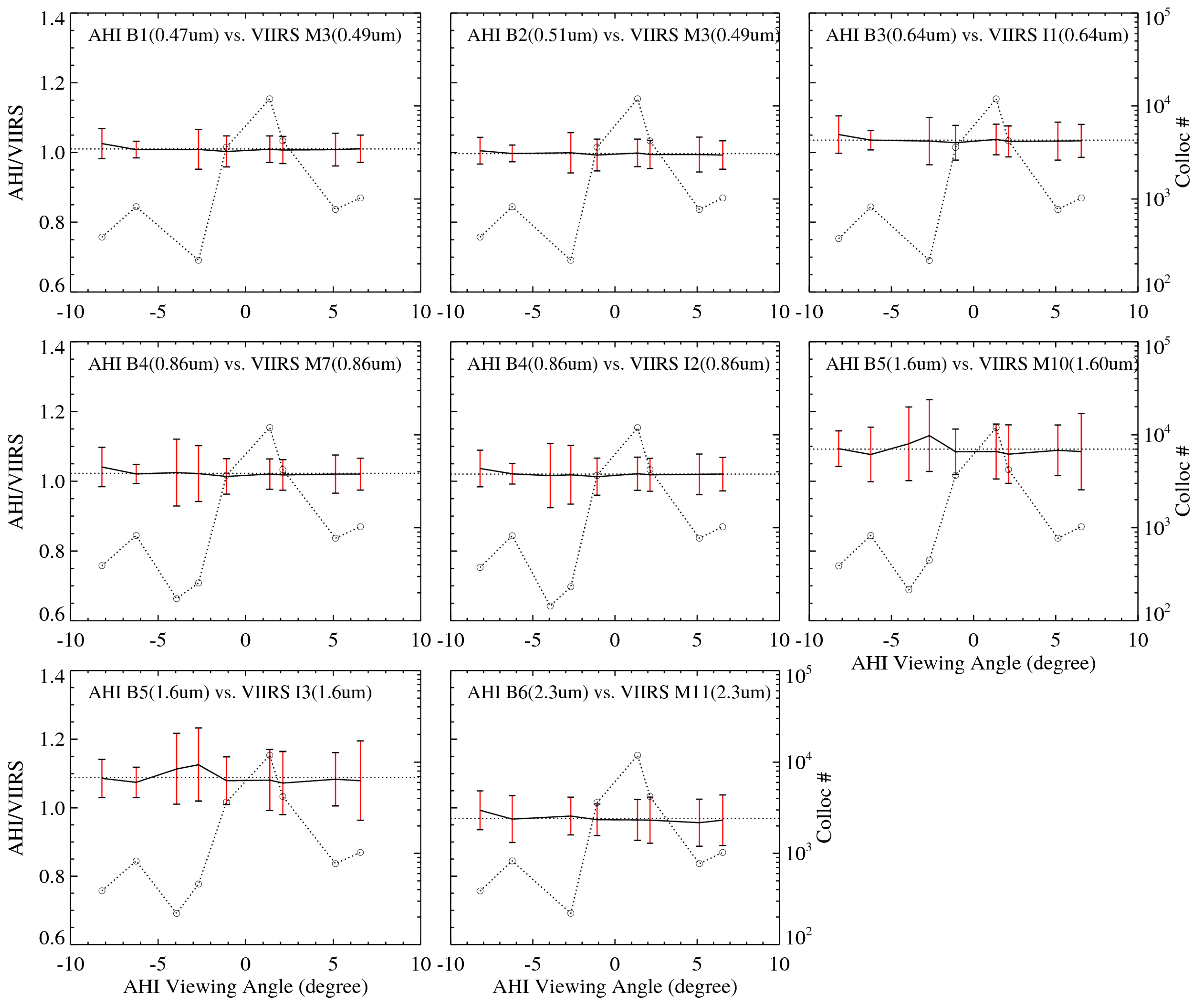
4.2. Ray-Matching Inter-Calibration: E–W Viewing Angle Dependent Calibration Difference
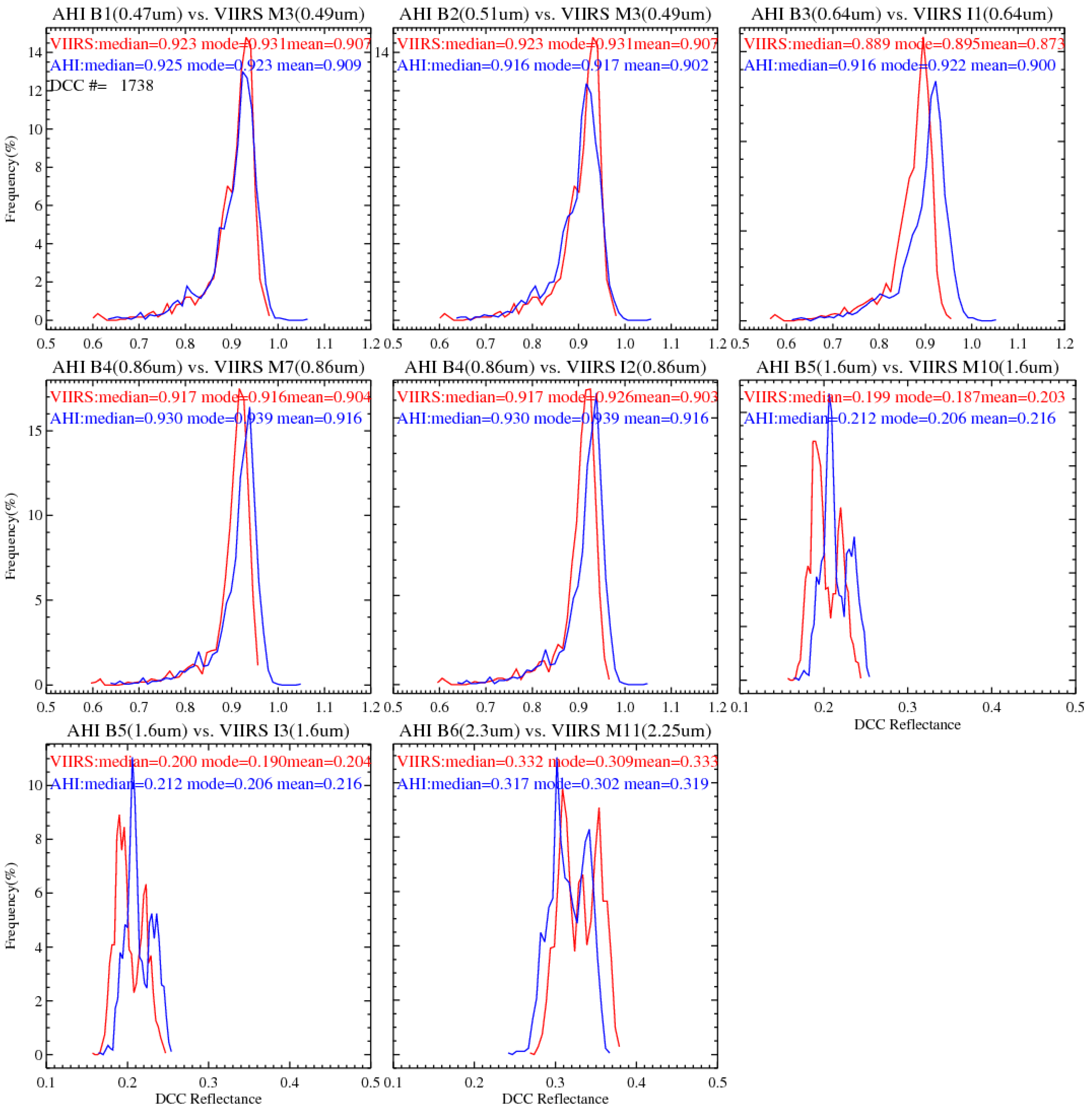
4.3. Collocated DCC Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Takahashi, M.; Andou, A.; Date, K.; Hosaka, K.; Mori, N.; Murata, H.; Okuyama, A.; Tabata, T.; Yoshino, R.; Bessho, K. Himawari-8 post-launch radiometric calibration and navigation analysis. In Proceedings of the 2015 EUMETSAT Conference, Toulouse, France, 21–25 September 2015.
- Cao, C. Overview and progress update on GOES-R calibration/validation. In Proceedings of the 2012 AMS 92nd Annual Meeting/8th Annual Symposium on Future Operational Environment Satellite System, New Orleans, LA, USA, 22–26 January 2012.
- Pearlman, A.; Pogorzala, D.; Cao, C. GOES-R Advanced Baseline Imager: Spectral functions and radiometric biases with the NPP visible infrared imaging radiometer suite evaluated for desert calibration sites. Appl. Opt. 2013, 31, 7660–7668. [Google Scholar] [CrossRef] [PubMed]
- Xiong, J.; Butler, J.; Chiang, K.; Efremova, B.; Fulbright, J.; Lei, N.; McIntire, J.; Oudrari, H.; Sun, J.; Wang, Z.; et al. VIIRS on-orbit calibration methodology and performance. J. Geophys. Res.: Atmos. 2013, 118, 5065–5078. [Google Scholar] [CrossRef]
- Cao, C.; Xiong, X.; Blonski, S.; Liu, Q.; Uprety, S.; Shao, X.; Bai, Y.; Weng, F. Suomi NPP VIIRS sensor data record verification, validation, and long-term performance monitoring. J. Geophys. Res.: Atmos. 2013, 118, 1–15. [Google Scholar] [CrossRef]
- Uprety, S.; Cao, C. Suomi NPP VIIRS reflective solar band on-orbit radiometric stability and accuracy assessment using desert and Antarctica Dome C sites. Remote Sens. Environ. 2015, 166, 106–115. [Google Scholar] [CrossRef]
- Griffith, C. ABI’s unique calibration and validation capabilities. In Proceedings of the 2015 EUMETSAT Conference, Toulouse, France, 21–25 September 2015.
- NOAA/STAR VIIRS SDR Team and the science team members. Joint Polar Satellite System (JPSS) Visible Infrared Imaging Radiometer Suite (VIIRS) Sensor Data Records (SDR) Radiometric Calibration Algorithm Theoretical Basis Document (ATBD) 2013. Available online: http://www.star.nesdis.noaa.gov/smcd/spb/nsun/snpp/VIIRS/ATBD-VIIRS-RadiometricCal_20131212.pdf (accessed on 19 November 2015).
- McIntire, J.; Moyer, D.; Efremova, B.; Oudrari, H.; Xiong, X. On-orbit characterization of S-NPP VIIRS transmission functions. IEEE Trans. Geosci. Remote Sens. 2015, 53. [Google Scholar] [CrossRef]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An introduction to Himawari-8/9—Japan’s new-generation geostationary meteorological satellites. J. Meteorol. Soc. Jpn. 2016. [Google Scholar] [CrossRef]
- Japan Meteorological Agency (JMA) Himawari-8 Advanced Himawari Imaer (AHI) Webpage. Available online: http://www.data.jma.go.jp/mscweb/en/himawari89/space_segment/spsg_ahi.html (accessed on 19 November 2015).
- Cao, C.; de Luccia, F.; Xiong, X.; Wolfe, R.; Weng, F. Early on-orbit performance of the visible infrared imaging radiometer suite onboard the Suomi National Polar-Orbiting Partnership (S-NPP) satellite. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1142–1156. [Google Scholar] [CrossRef]
- Wolfe, R.; Lin, G.; Nishihama, M.; Tewari, K.; Tilton, J.; Isaacman, A. Suomi NPP VIIRS prelaunch and on-orbit geometric calibration and characterization. J. Geophys. Res. 2013, 118, 11508–11521. [Google Scholar]
- Wu, X.; Hewison, T.; Tahara, Y. GSICS GEO-LEO inter-calibration: Baseline algorithm and early results. Proc. SPIE 2009, 7456. [Google Scholar] [CrossRef]
- Hewison, T.; Wu., X.; Yu, F.; Tahara, Y.; Hu, X.; Kim, D.; Koenig, M. GSICS inter-calibration of infrared channels of geostationary imagers using Metop/IASI. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1160–1170. [Google Scholar] [CrossRef]
- Gardashov, R.; Eminov, M. Determination of sunglint location and its characteristics on observation from a METEOSAT 9 satellite. Int. J. Remote Sens. 2015, 36, 2584–2598. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X.; Varma Raja, M.; Li, Y.; Wang, L.; Goldberg, M. Diurnal and scan angle variations in the calibration of GOES Imager infrared channels. IEEE Trans. Geosci. Remote Sens. 2013, 51, 671–683. [Google Scholar] [CrossRef]
- Doelling, D.; Minnis, P.; Nguyen, L. Calibration comparison between SEVERI, MODIS and GOES data. In Proceedings of the 2004 MSG RAO Workshop, Salzburg, Austria, 6–10 September 2004.
- Sohn, B.-J.; Ham, S.; Yang, P. Possibility of the visible-channel calibration using deep convective clouds overshooting the TTL. J. Appl. Meteorol. Climatol. 2009, 48, 2271–2283. [Google Scholar]
- Doelling, D.; Nguyen, L.; Minnis, P. On the use of deep convective clouds to calibrate AVHRR data. SPIE Proc. 2004, 5542. [Google Scholar] [CrossRef]
- Doelling, D.; Morstad, D.; Scarino, B.; Bhatt, R.; Gopalan, A. The characterization of deep convective clouds as an invariant calibration target and as a visible calibration technique. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1147–1159. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X. An integrated method to improve the GOES Imager visible radiometric calibration accuracy. Remote Sens. Environ. 2015, 164, 103–113. [Google Scholar] [CrossRef]
- Beuchler, D.; Koshak, W.; Christian, H.; Goodman, S. Assessing the performance of the Lightning Imaging Sensor (LIS) using deep convective clouds. Atmos. Res. 2014, 135–136, 397–403. [Google Scholar] [CrossRef]
- Hu, Y.; Wielicki, B.; Yang, P.; Stackhouse, P.; Lin, B.; Young, D. Application of deep convective cloud albedo observation to satellite-based study of terrestrial atmosphere: Monitoring the stability of spaceborn measurement and assessing absorption anomaly. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2594–2599. [Google Scholar]
- Scarino, B.; Doelling, D.; Minnis, P.; Gopalan, A.; Chee, T.; Bhatt, R.; Lukashin, C.; Haney, C. A web-based tool for calculating spectral band difference adjustment factors derived from SCIAMACHY hyper-spectral data. IEEE Trans. Geosci. Remote Sens. 2016. [Google Scholar] [CrossRef]
- NOAA/NESDIS/STAR, Algorithm Theoretical Basis Document, ABI Aerosol Detection Product, May 2010. Available online: http://www.star.nesdis.noaa.gov/goesr/docs/ATBD/ADP.pdf (accessed on 19 November 2015).
- Japan Meteorological Agency. AHI-8 Performance Test Results, 2015. Available online: http://www.data.jma.go.jp/mscweb/en/himawari89/space_segment/doc/AHI8_performance_test_en.pdf (accessed on 19 November 2015).
- Okuyama, A.; (Japan Meterological Agency, Tokoyo, Japan). Personal communication, 2014.
- Pogorzala, D.; Padula, F.; Cao, C.; Wu, X. The GOES-R ABI fixed format: Overview and case sudy. Available online: http://adsabs.harvard.edu/abs/2014AGUFMIN43C3702P (accessed on 19 November 2015).
- Zuidema, P.; Davies, R.; Moroney, C. On the angular radiance closure of tropical cumulus cognestus clouds observed by the Multiangle Imaging Spectroradiometr. J. Geophys. Res. 2003, 108, 4626–4637. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Himawari-8 AHI | S-NPP VIIRS | ||||
|---|---|---|---|---|---|
| Central Wavelength (µm) | Band Name | Nadir Spatial Resolution (km) | Central Wavelength (µm) | Band Name | Nadir Spatial Resolution (km) |
| 0.47 | B1 | 1.0 | 0.486 | M3 | 0.750 |
| 0.51 | B2 | 1.0 | 0.486 | M3 | 0.750 |
| 0.64 | B3 | 0.5 | 0.639 | I1 | 0.375 |
| 0.86 | B4 | 1.0 | 0.862 | M7 | 0.750 |
| 0.862 | I2 | 0.375 | |||
| 1.6 | B5 | 2.0 | 1.602 | M10 | 0.750 |
| 1.602 | I3 | 0.375 | |||
| 2.3 | B6 | 2.0 | 2.257 | M11 | 0.750 |
| SBAF | AHI | B1 | B2 | B3 | B4 | B5 | B6 | ||
|---|---|---|---|---|---|---|---|---|---|
| VIIRS | M3 | M3 | I1 | M7 | I2 | M10 | I3 | M11 | |
| Ray-matching (all-sky tropical Ocean) | SBAF_Slope | 0.991 | 1.005 | 1.000 | 0.998 | 0.998 | 1.019 | 1.022 | 1.0 |
| SBAF_Offset | 9.5e−3 | −1.341e−2 | –2.07e−4 | −4.18e−4 | −3.67e−4 | −2.216e−4 | −2.465e−4 | 0.0 | |
| Uncertainty (%) | 0.820 | 1.172 | 0.187 | 0.448 | 0.422 | 1.701 | 1.839 | - | |
| Coll. DCC | SBAF_Slope | 0.992 | 1.014 | 1.000 | 1.003 | 1.003 | 1.035 | 1.038 | 1.0 |
| SBAF_Offset | 9.989e−3 | −2.124e−2 | 1.594e−5 | −1.545e−3 | −1.459e−3 | 2.472e−3 | 2.875e−3 | 0.0 | |
| Uncertainty (%) | 0.238 | 0.596 | 0.033 | 0.106 | 0.100 | 0.736 | 0.753 | - | |
| AHI | B1 | B2 | B3 | B4 | B5 | B6 | |||
|---|---|---|---|---|---|---|---|---|---|
| VIIRS | M3 | M3 | I1 | M7 | I2 | M10 | I3 | M11 | |
| Ray-matching | 1.010 (±0.026) | 0.999 (±0.028) | 1.037 (±0.030) | 1.021 (±0.029) | 1.022 (±0.032) | 1.079 (±0.058) | 1.073 (±0.065) | 0.963 (±0.045) | |
| DCC | Median | 1.002 | 0.992 | 1.031 | 1.014 | 1.015 | 1.067 | 1.061 | 0.955 |
| Mode | 0.992 | 0.985 | 1.030 | 1.024 | 1.014 | 1.102 | 1.084 | 0.977 | |
| Mean | 1.003 | 0.994 | 1.031 | 1.014 | 1.015 | 1.064 | 1.058 | 0.958 | |
| Statistics * | 1.003 (±0.024) | 0.995 (±0.026) | 1.032 (±0.028) | 1.015 (±0.024) | 1.015 (0.025) | 1.065 (±0.030) | 1.059 (±0.032) | 0.959 (±0.026) | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, F.; Wu, X. Radiometric Inter-Calibration between Himawari-8 AHI and S-NPP VIIRS for the Solar Reflective Bands. Remote Sens. 2016, 8, 165. https://doi.org/10.3390/rs8030165
Yu F, Wu X. Radiometric Inter-Calibration between Himawari-8 AHI and S-NPP VIIRS for the Solar Reflective Bands. Remote Sensing. 2016; 8(3):165. https://doi.org/10.3390/rs8030165
Chicago/Turabian StyleYu, Fangfang, and Xiangqian Wu. 2016. "Radiometric Inter-Calibration between Himawari-8 AHI and S-NPP VIIRS for the Solar Reflective Bands" Remote Sensing 8, no. 3: 165. https://doi.org/10.3390/rs8030165
APA StyleYu, F., & Wu, X. (2016). Radiometric Inter-Calibration between Himawari-8 AHI and S-NPP VIIRS for the Solar Reflective Bands. Remote Sensing, 8(3), 165. https://doi.org/10.3390/rs8030165