GPS and BeiDou Differential Code Bias Estimation Using Fengyun-3C Satellite Onboard GNSS Observations



Abstract
:1. Introduction
2. Data and Methodology
2.1. DCB Estimation Method
2.2. Data Description and Processing Strategy
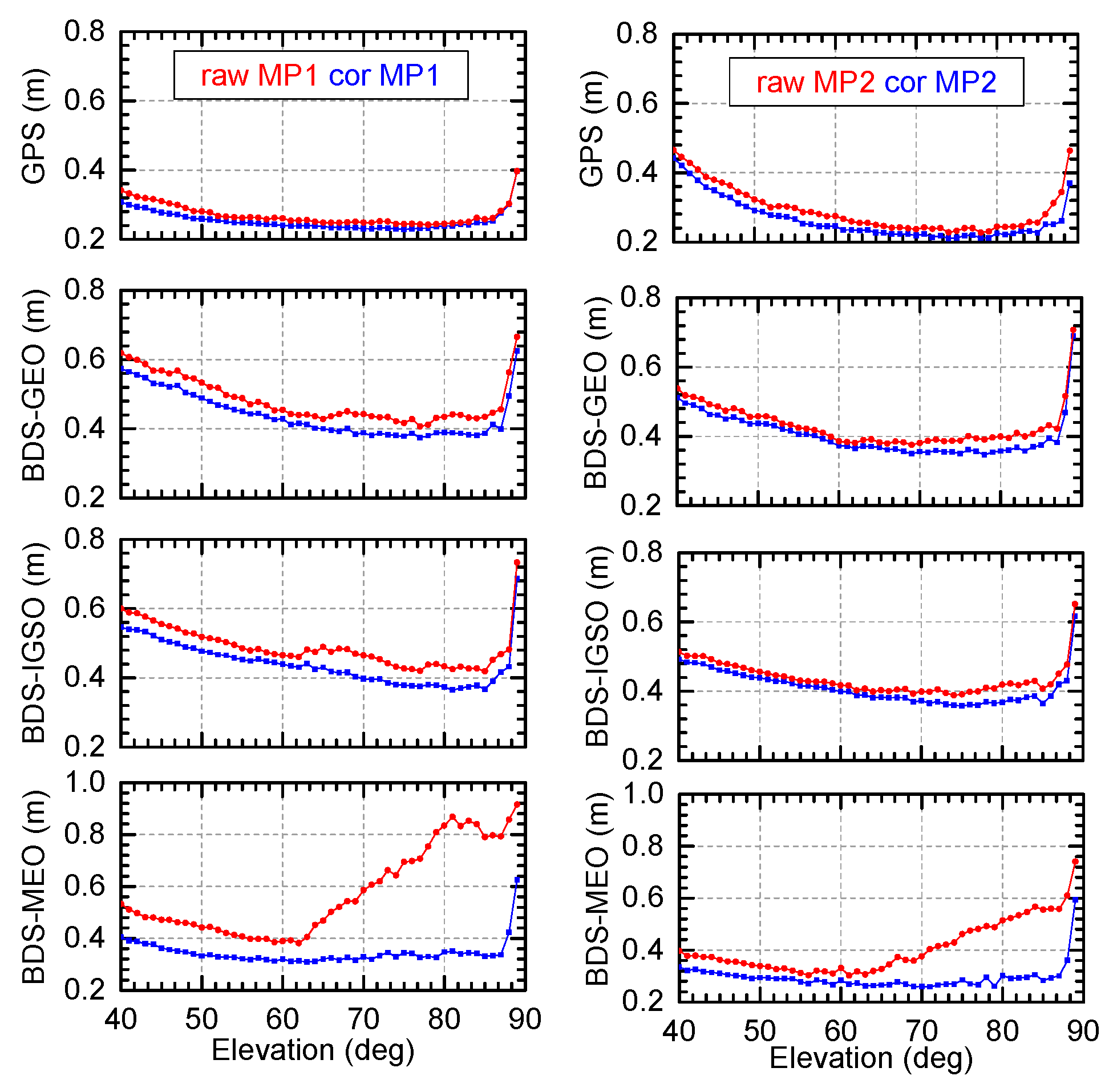
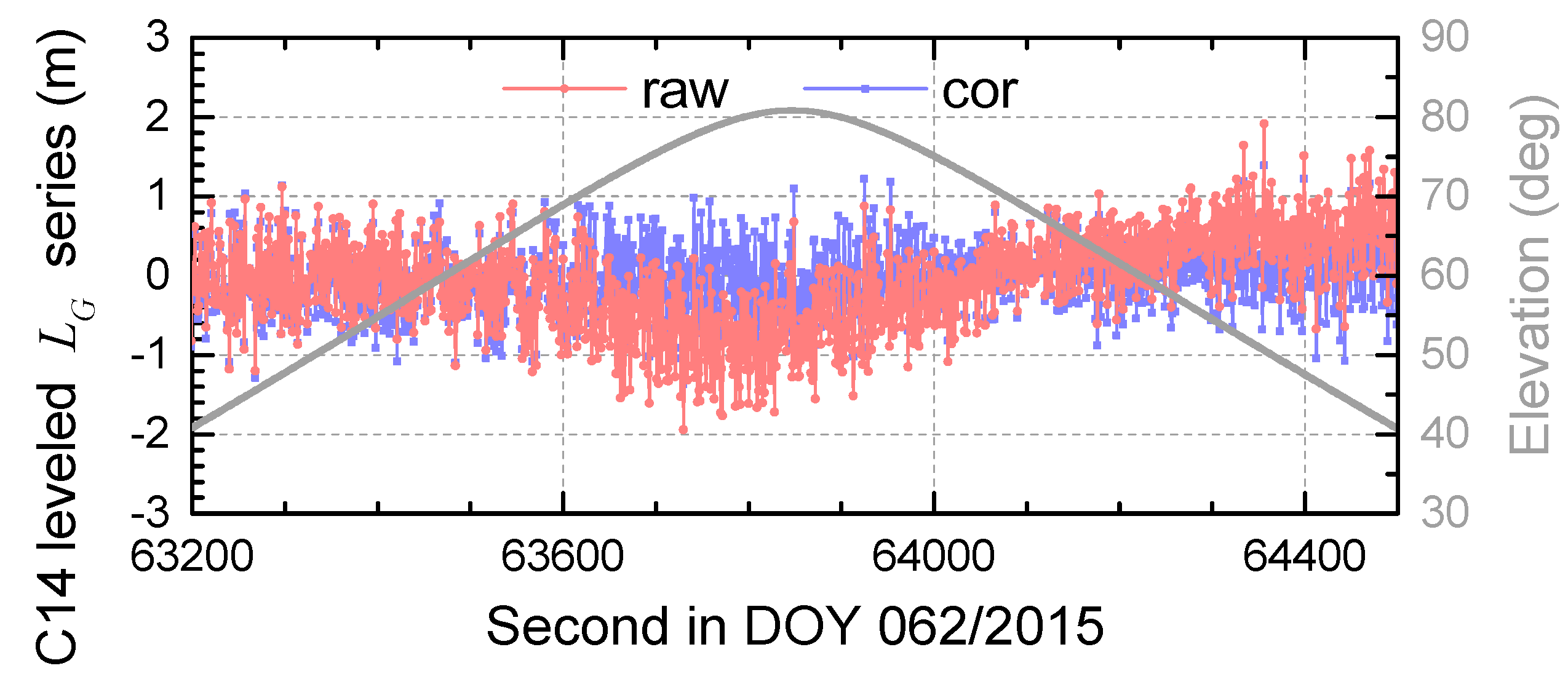
3. FY3C Pseudorange Multipath and Its Impact on DCB Estimation
3.1. Multipath Modeling and Validation
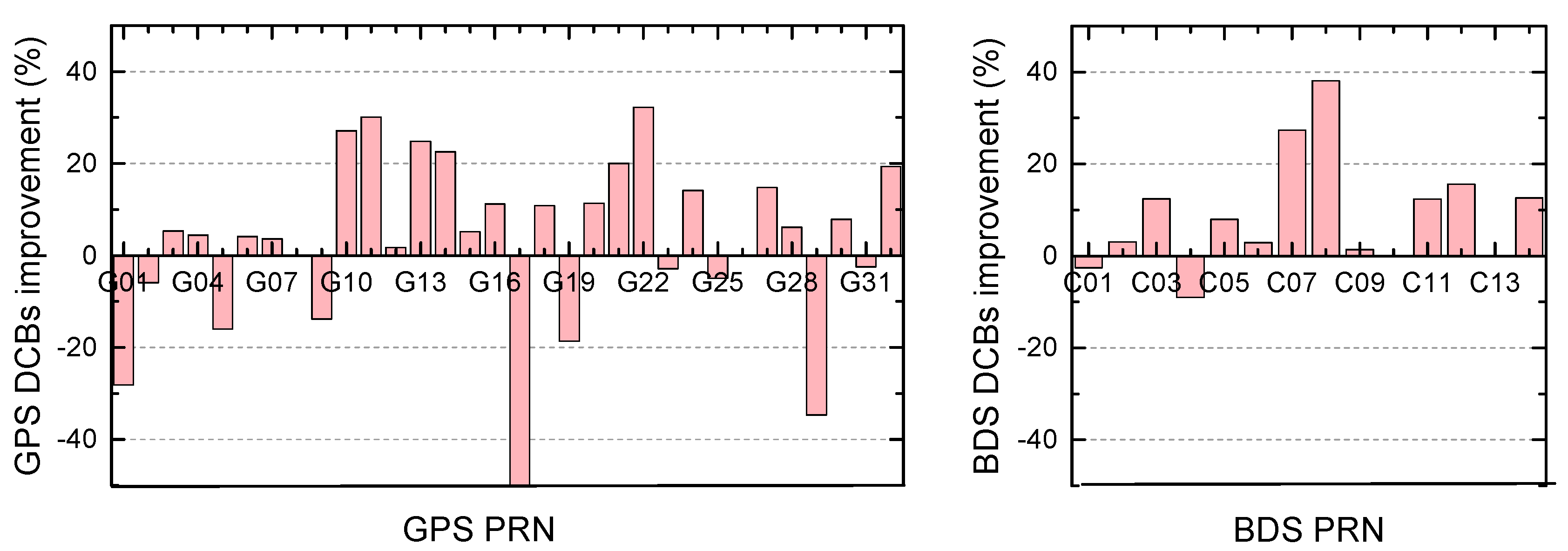
3.2. Multipath Impacts on DCB Estimation
4. Evaluation of DCB and TEC Estimates with Multipath Correction
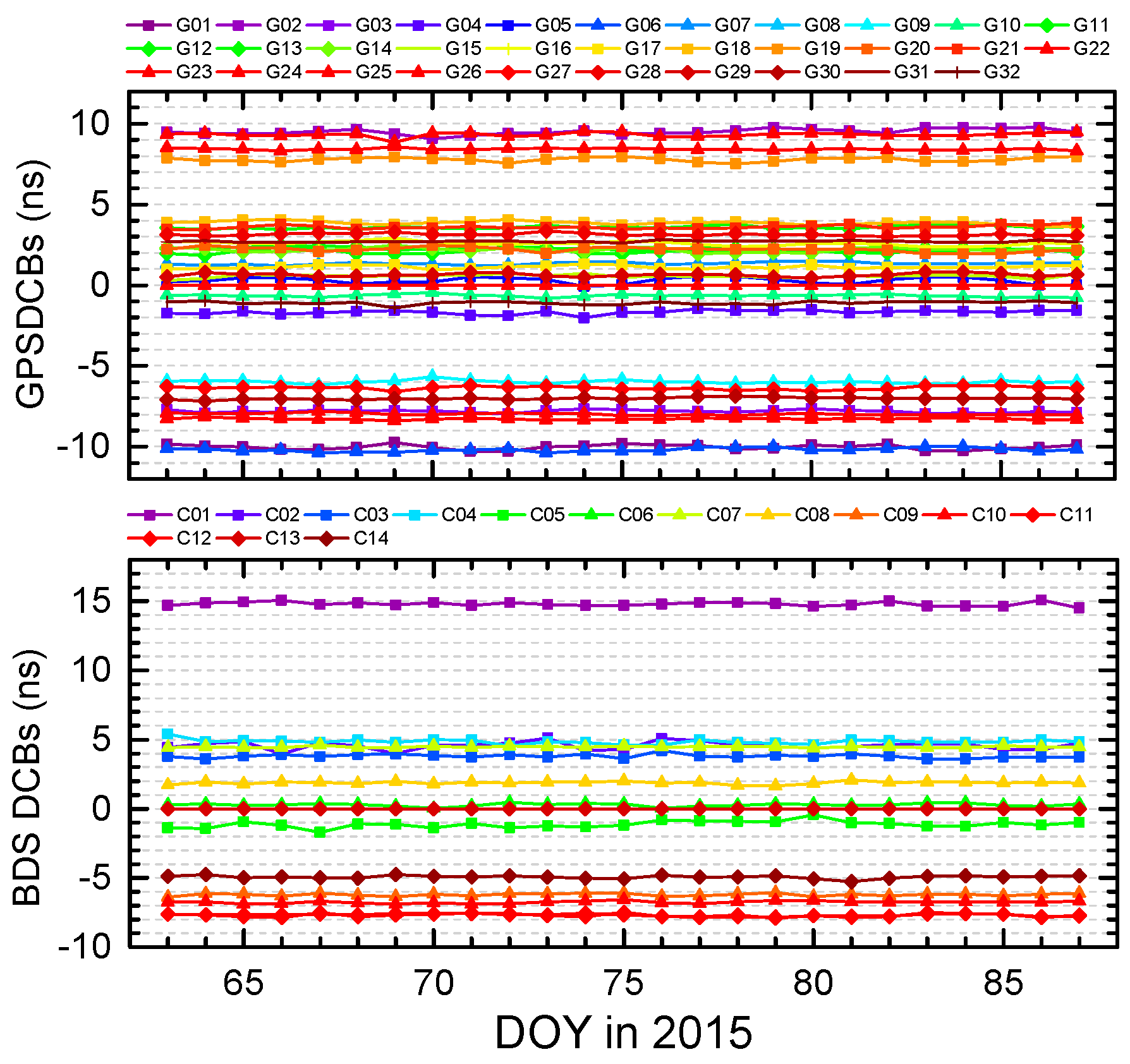
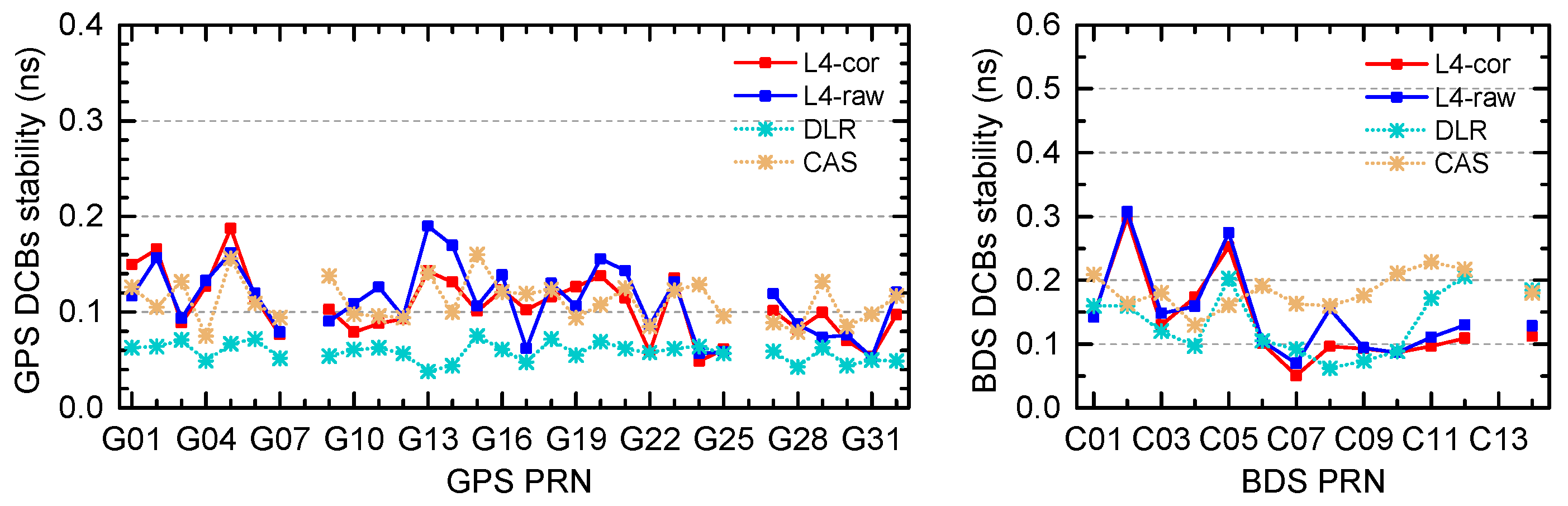
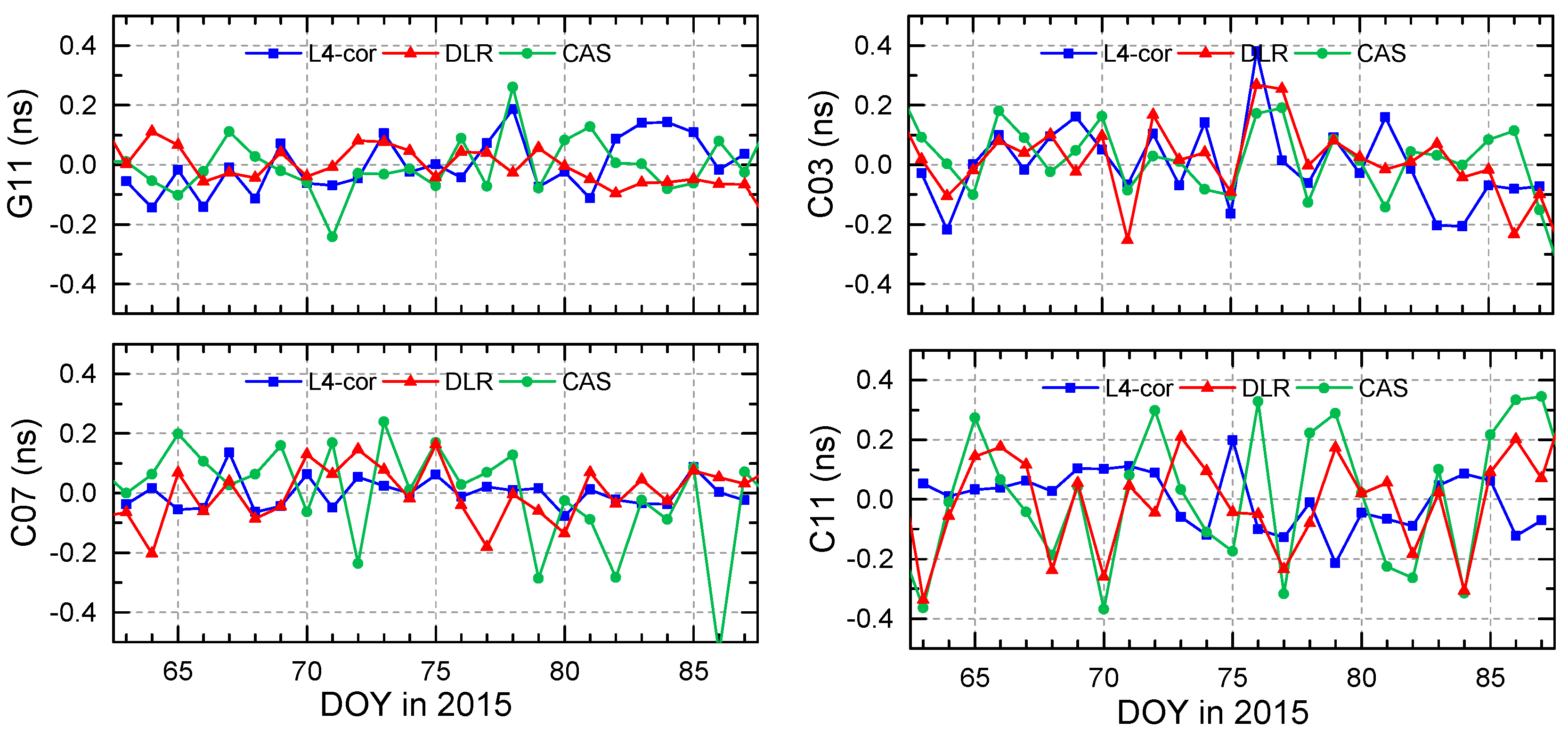
4.1. GPS and BDS Satellite DCB Evaluation
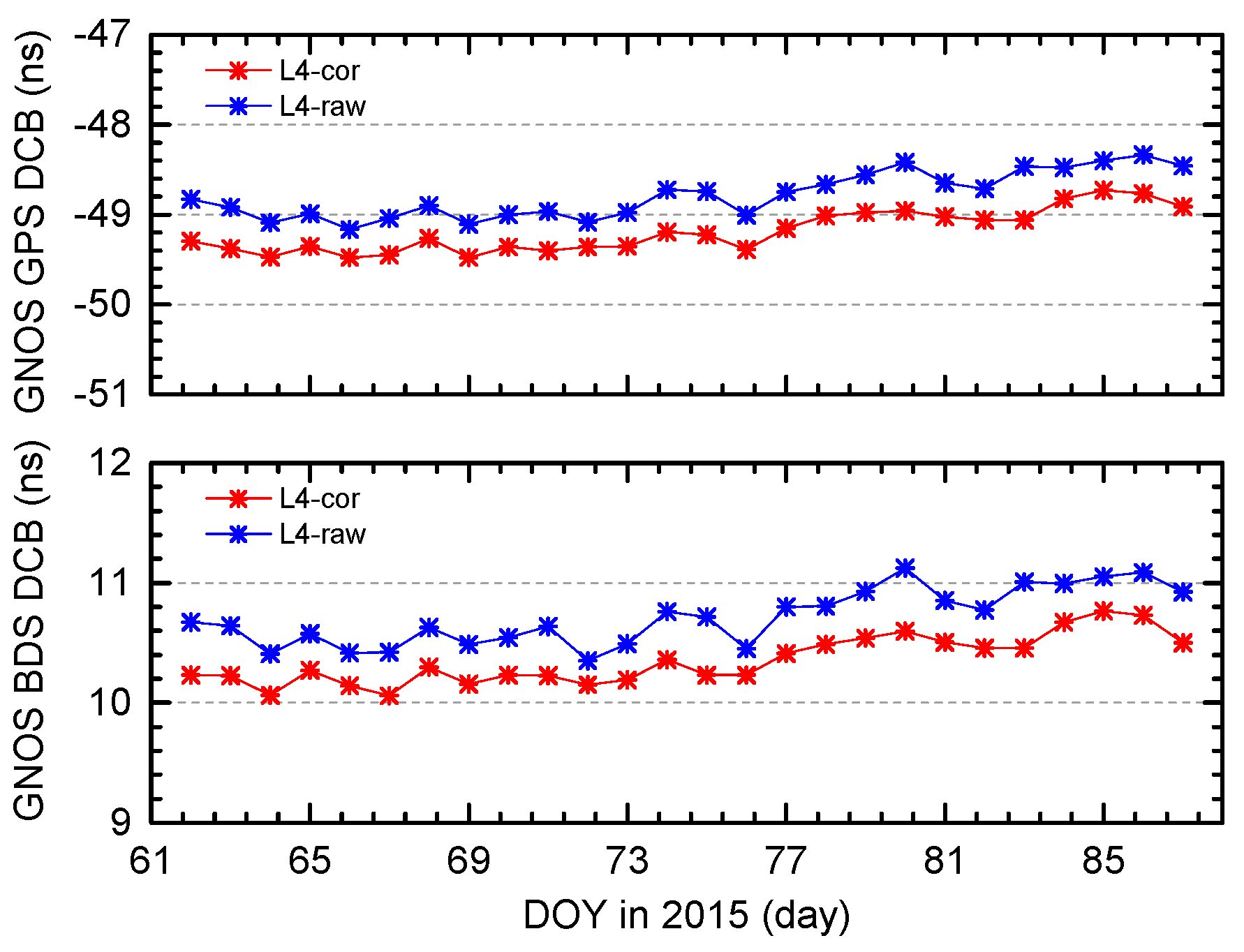
4.2. Receiver DCBs Evaluation
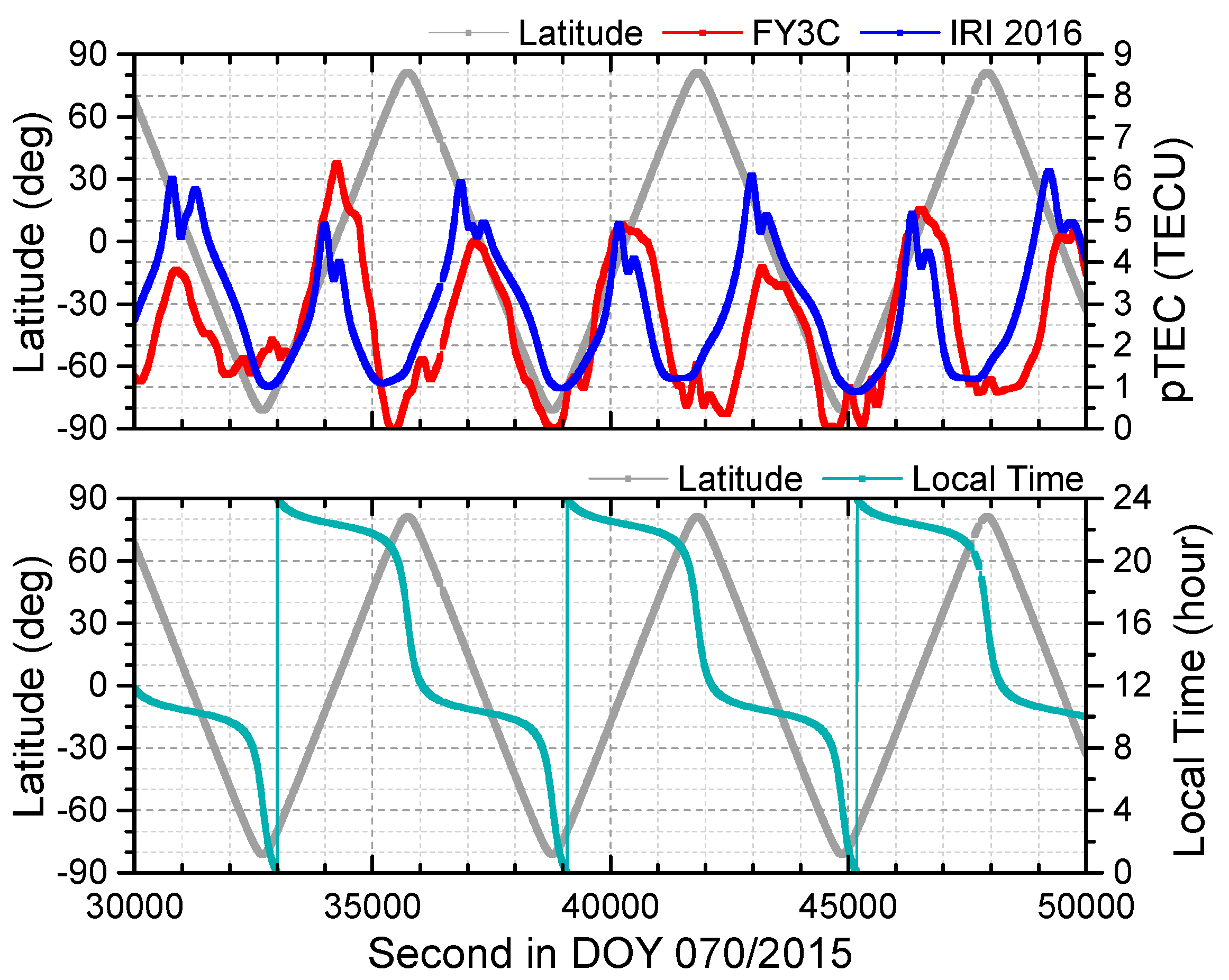
4.3. Plasmasphere Electron Content Estimation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Coco, D.S.; Coker, C.; Dahlke, S.R.; Clynch, J.R. Variability of GPS satellite differential group delay biases. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 931–938. [Google Scholar] [CrossRef]
- Sardón, E.; Zarraoa, N. Estimation of total electron content using GPS data: How stable are the differential satellite and receiver instrumental biases? Radio Sci. 1997, 32, 1899–1910. [Google Scholar] [CrossRef]
- Jefferson, D.C.; Heflin, M.B.; Muellerschoen, R.J. Examining the C1-P1 Pseudorange Bias. GPS Solut. 2001, 4, 25–30. [Google Scholar] [CrossRef]
- Wilson, B.D.; Mannucci, A.J. Instrumental Biases in Ionospheric Measurements Derived from GPS Data. In Proceedings of the 6th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1993), Salt Lake City, UT, USA, 22–24 September 1993; pp. 1343–1351. [Google Scholar]
- Guo, F.; Zhang, X.; Wang, J. Timing group delay and differential code bias corrections for BeiDou positioning. J. Geodesy 2015, 89, 427–445. [Google Scholar] [CrossRef]
- Ge, Y.; Zhou, F.; Sun, B.; Wang, S.; Shi, B. The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning. Sensors 2017, 17, 602. [Google Scholar] [CrossRef] [PubMed]
- Navstar GPS. ICD-GPS-200 Revision C. 1993. Available online: https://www.gps.gov/technical/icwg/ICD-GPS-200C.pdf (accessed on 29 November 2017).
- BeiDou ICD. BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal B1I (Version 1.0). 2012. Available online: http://en.beidou.gov.cn/beidoupolicy.html (accessed on 29 November 2017).
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System. Ph.D. Thesis, Astronomisches Institute, Universität Bern, Switzerland, 1999. [Google Scholar]
- Mannucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J. New approaches in global ionospheric determination using ground GPS data. J. Atmos. Sol.-Terr. Phys. 1999, 61, 1237–1247. [Google Scholar] [CrossRef]
- Collins, P.; Bisnath, S.; Lahaye, F.; HÉRoux, P. Undifferenced GPS Ambiguity Resolution Using the Decoupled Clock Model and Ambiguity Datum Fixing. Navigation 2010, 57, 123–135. [Google Scholar] [CrossRef]
- Li, H.; Li, B.; Lou, L.; Yang, L.; Wang, J. Impact of GPS differential code bias in dual- and triple-frequency positioning and satellite clock estimation. GPS Solut. 2017, 21, 897–903. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.C.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geodesy 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Sanz, J.; Miguel Juan, J.; Rovira-Garcia, A.; González-Casado, G. GPS differential code biases determination: Methodology and analysis. GPS Solut. 2017, 21, 1549–1561. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. Differential Code Bias Estimation using Multi-GNSS Observations and Global Ionosphere Maps. Navigation 2014, 61, 191–201. [Google Scholar] [CrossRef]
- Jiao, W.; Geng, C.; Ma, Y.; Huang, X.; Zhang, H.; Li, M.; Hu, Z. A Method to Estimate DCB of COMPASS Satellites Based on Global Ionosphere Map. In China Satellite Navigation Conference (CSNC) 2012 Proceedings; Sun, J., Liu, J., Yang, Y., Fan, S., Eds.; Springer: Berlin, Germany, 2012; pp. 347–353. [Google Scholar]
- Yue, X.; Schreiner, W.S.; Hunt, D.C.; Rocken, C.; Kuo, Y.-H. Quantitative evaluation of the low Earth orbit satellite based slant total electron content determination. Space Weather 2011, 9, S09001. [Google Scholar] [CrossRef]
- Foelsche, U.; Kirchengast, G. A simple “geometric” mapping function for the hydrostatic delay at radio frequencies and assessment of its performance. Geophys. Res. Lett. 2002, 29. [Google Scholar] [CrossRef]
- Lin, J.; Yue, X.; Zhao, S. Estimation and analysis of GPS satellite DCB based on LEO observations. GPS Solut. 2016, 20, 251–258. [Google Scholar] [CrossRef]
- Wautelet, G.; Loyer, S.; Mercier, F.; Perosanz, F. Computation of GPS P1–P2 Differential Code Biases with JASON-2. GPS Solut. 2017, 21, 1619–1631. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Beyerle, G. Carrier phase wind-up in GPS reflectometry. GPS Solut. 2009, 13. [Google Scholar] [CrossRef]
- Jin, R.; Jin, S.; Feng, G. M_DCB: Matlab code for estimating GNSS satellite and receiver differential code biases. GPS Solut. 2012, 16, 541–548. [Google Scholar] [CrossRef]
- Zhong, J.; Lei, J.; Dou, X.; Yue, X. Assessment of vertical TEC mapping functions for space-based GNSS observations. GPS Solut. 2016, 20, 353–362. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Dick, G.; Zhang, F.; Rothacher, M. A new data processing strategy for huge GNSS global networks. J. Geodesy 2006, 80, 199–203. [Google Scholar] [CrossRef]
- Odijk, D.; Zhang, B.; Khodabandeh, A.; Odolinski, R.; Teunissen, P.J.G. On the estimability of parameters in undifferenced, uncombined GNSS network and PPP-RTK user models by means of S-system theory. J. Geodesy 2016, 90, 15–44. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2017, 21, 177–186. [Google Scholar] [CrossRef]
- Montenbruck, O.; Kroes, R. In-flight performance analysis of the CHAMP BlackJack GPS Receiver. GPS Solut. 2003, 7, 74–86. [Google Scholar] [CrossRef]
- Li, M.; Li, W.; Shi, C.; Jiang, K.; Guo, X.; Dai, X.; Meng, X.; Yang, Z.; Yang, G.; Liao, M. Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations. J. Geodesy 2017, 91, 1313–1327. [Google Scholar] [CrossRef]
- Wang, N.; Yuan, Y.; Li, Z.; Montenbruck, O.; Tan, B. Determination of differential code biases with multi-GNSS observations. J. Geodesy 2016, 90, 209–228. [Google Scholar] [CrossRef]
- Shi, C.; Fan, L.; Li, M.; Liu, Z.; Gu, S.; Zhong, S.; Song, W. An enhanced algorithm to estimate BDS satellite’s differential code biases. J. Geodesy 2016, 90, 161–177. [Google Scholar] [CrossRef]
- Xue, J.; Song, S.; Zhu, W. Estimation of differential code biases for Beidou navigation system using multi-GNSS observations: How stable are the differential satellite and receiver code biases? J. Geodesy 2016, 90, 309–321. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Truhlik, V.; Shubin, V.; Galkin, I.; Reinisch, B.; Huang, X. International Reference Ionosphere 2016: From ionospheric climate to real-time weather predictions. Space Weather 2017, 15, 418–429. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W.; Burns, A.; Yue, X.; Zhang, S.; Zhang, Y.; Huang, C. Profiles of ionospheric storm-enhanced density during the 17 March 2015 great storm. J. Geophys. Res. Space Phys. 2016, 121, 727–744. [Google Scholar] [CrossRef]
- Lee, C.K.; Han, S.C.; Bilitza, D.; Chung, J.K. Validation of international reference ionosphere models using in situ measurements from GRACE K-band ranging system and CHAMP planar Langmuir probe. J. Geodesy 2011, 85, 921–929. [Google Scholar] [CrossRef]
- Jee, G.; Lee, H.B.; Kim, Y.H.; Chung, J.K.; Cho, J. Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: Ionospheric perspective. J. Geophys. Res. Space Phys. 2010, 115, 161–168. [Google Scholar] [CrossRef]
- Eccles, D.; King, J. A review of topside sounder studies of the equatorial ionosphere. Proc. IEEE 1969, 57, 1012–1018. [Google Scholar] [CrossRef]
- Bilitza, D. Evaluation of the IRI-2007 model options for the topside electron density. Adv. Space Res. 2009, 44, 701–706. [Google Scholar] [CrossRef]
- Zhong, J.; Wang, W.; Yue, X.; Burns, A.G.; Dou, X.; Lei, J. Long-duration depletion in the topside ionospheric total electron content during the recovery phase of the March 2015 strong storm. J. Geophys. Res. Space Phys. 2016, 121, 4733–4747. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Difference (m) | Raw STD (m) | Corrected STD (m) | |
|---|---|---|---|
| GPS | −0.025 | 0.518 | 0.499 |
| BDS-GEO | −0.047 | 0.727 | 0.708 |
| BDS-IGSO | −0.040 | 0.678 | 0.652 |
| BDS-MEO | −0.066 | 0.553 | 0.493 |
| GPS Difference (ns) | BDS Difference (ns) | |||
|---|---|---|---|---|
| DLR | CAS | DLR | CAS | |
| L4-raw | 0.385 | 0.483 | 0.458 | 0.556 |
| L4-cor | 0.380 | 0.472 | 0.451 | 0.545 |
| L4-Cor (ns) | L4-Raw (ns) | DLR (ns) | CAS (ns) | |
|---|---|---|---|---|
| GPS | 0.106 | 0.112 | 0.058 | 0.112 |
| BDS GEOs | 0.200 (0.149) | 0.206 (0.150) | 0.148 | 0.169 |
| BDS IGSOs | 0.086 | 0.102 | 0.084 | 0.180 |
| BDS MEOs | 0.106 | 0.123 | 0.187 | 0.209 |
| L4-Raw (ns) | L4-Cor (ns) | |||
|---|---|---|---|---|
| GPS | BDS | GPS | BDS | |
| Mean (ns) | −48.784 | 10.715 | −49.174 | 10.367 |
| STD (ns) | 0.254 | 0.233 | 0.242 | 0.209 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Li, M.; Shi, C.; Fang, R.; Zhao, Q.; Meng, X.; Yang, G.; Bai, W. GPS and BeiDou Differential Code Bias Estimation Using Fengyun-3C Satellite Onboard GNSS Observations. Remote Sens. 2017, 9, 1239. https://doi.org/10.3390/rs9121239
Li W, Li M, Shi C, Fang R, Zhao Q, Meng X, Yang G, Bai W. GPS and BeiDou Differential Code Bias Estimation Using Fengyun-3C Satellite Onboard GNSS Observations. Remote Sensing. 2017; 9(12):1239. https://doi.org/10.3390/rs9121239
Chicago/Turabian StyleLi, Wenwen, Min Li, Chuang Shi, Rongxin Fang, Qile Zhao, Xiangguang Meng, Guanglin Yang, and Weihua Bai. 2017. "GPS and BeiDou Differential Code Bias Estimation Using Fengyun-3C Satellite Onboard GNSS Observations" Remote Sensing 9, no. 12: 1239. https://doi.org/10.3390/rs9121239
APA StyleLi, W., Li, M., Shi, C., Fang, R., Zhao, Q., Meng, X., Yang, G., & Bai, W. (2017). GPS and BeiDou Differential Code Bias Estimation Using Fengyun-3C Satellite Onboard GNSS Observations. Remote Sensing, 9(12), 1239. https://doi.org/10.3390/rs9121239