
Integrating Radarsat-2, Lidar, and Worldview-3 Imagery to Maximize Detection of Forested Inundation Extent in the Delmarva Peninsula, USA



Abstract
:
1. Introduction
- How do prior weather conditions affect the identification of depressions using lidar data?
- How accurate are inundation products derived using high-resolution optical and SAR data?
- How consistent is the accuracy of inundation products derived from SAR data repeatedly collected over a short time period?
- Can integrating multiple sources of data (lidar, optical, and radar imagery) improve inundation mapping?
2. Methods
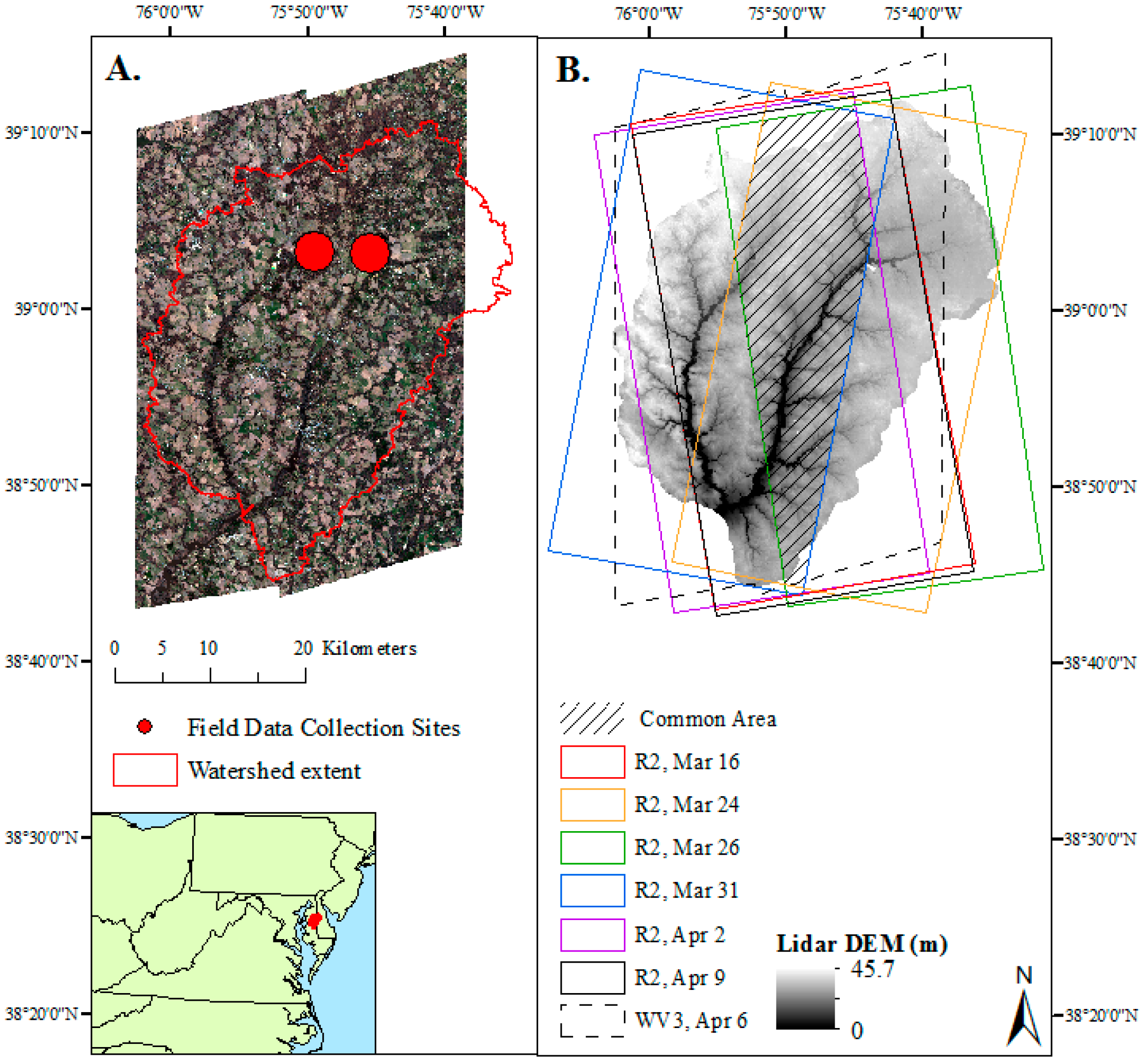
2.1. Study Area
2.2. Field Data Collection
2.3. Lidar Processing
2.3.1. Lidar DEMs
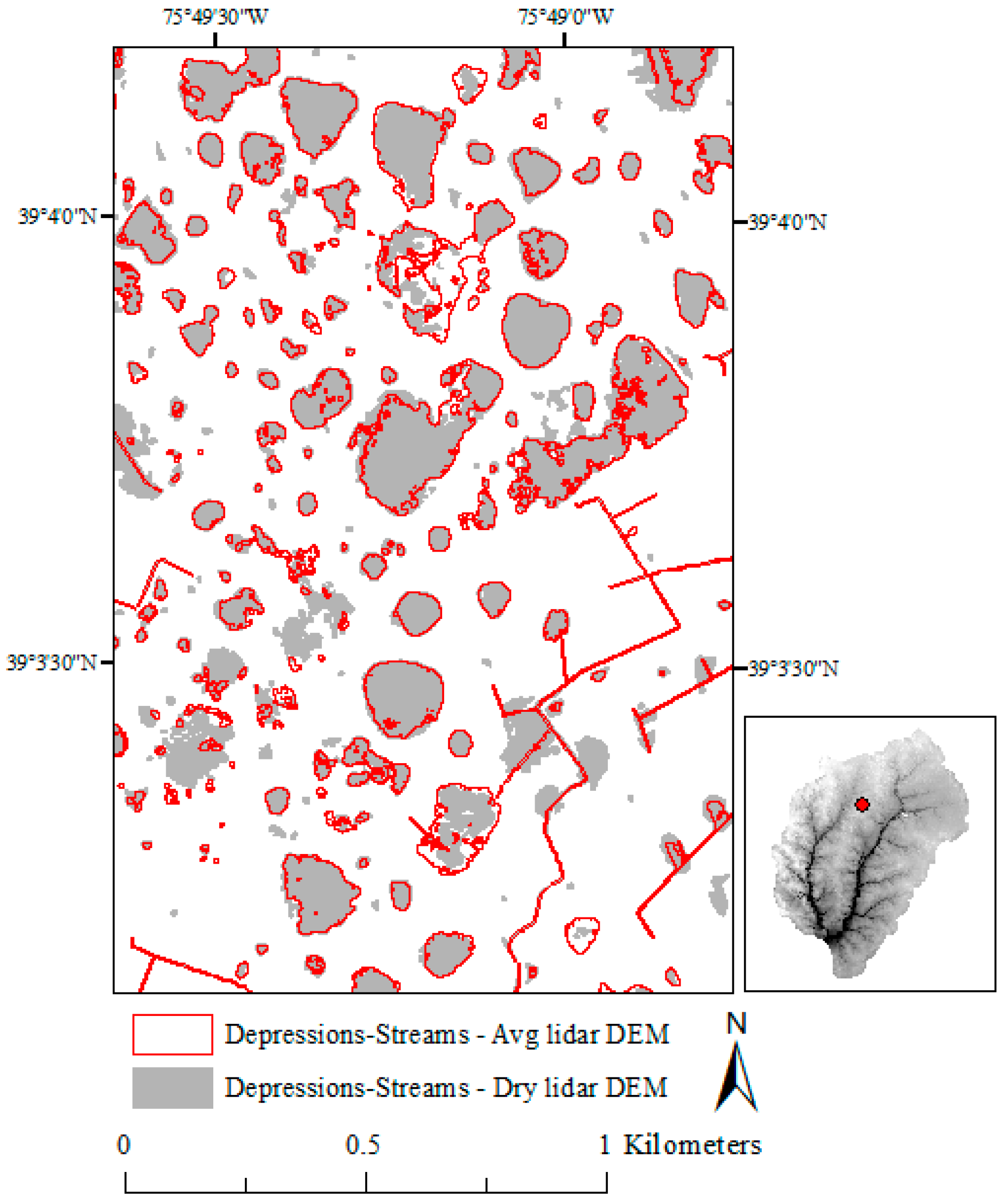
2.3.2. Depression Identification
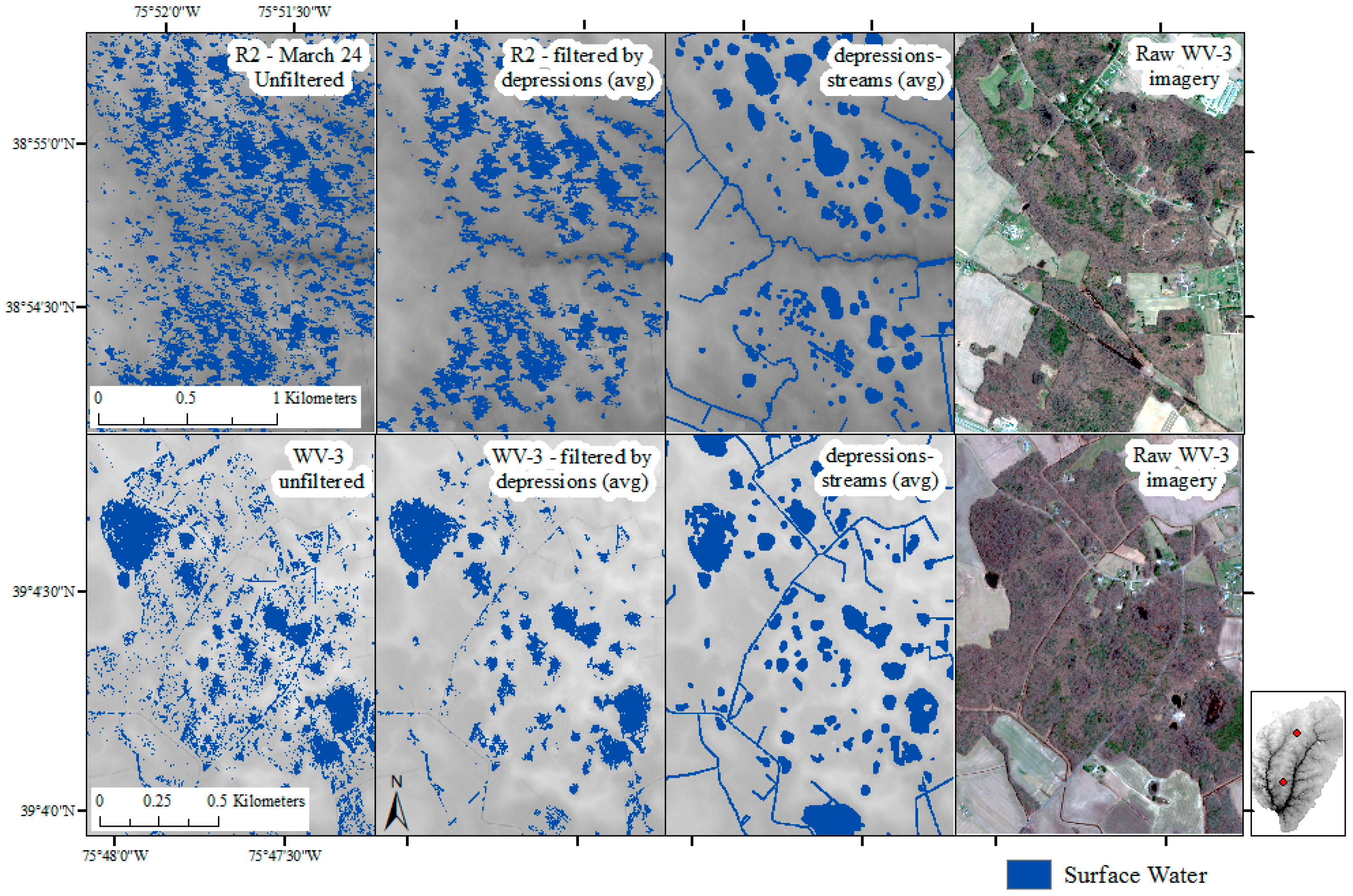
2.3.3. Depression/Stream Filter
2.3.4. Enhanced Topographic Wetness Index
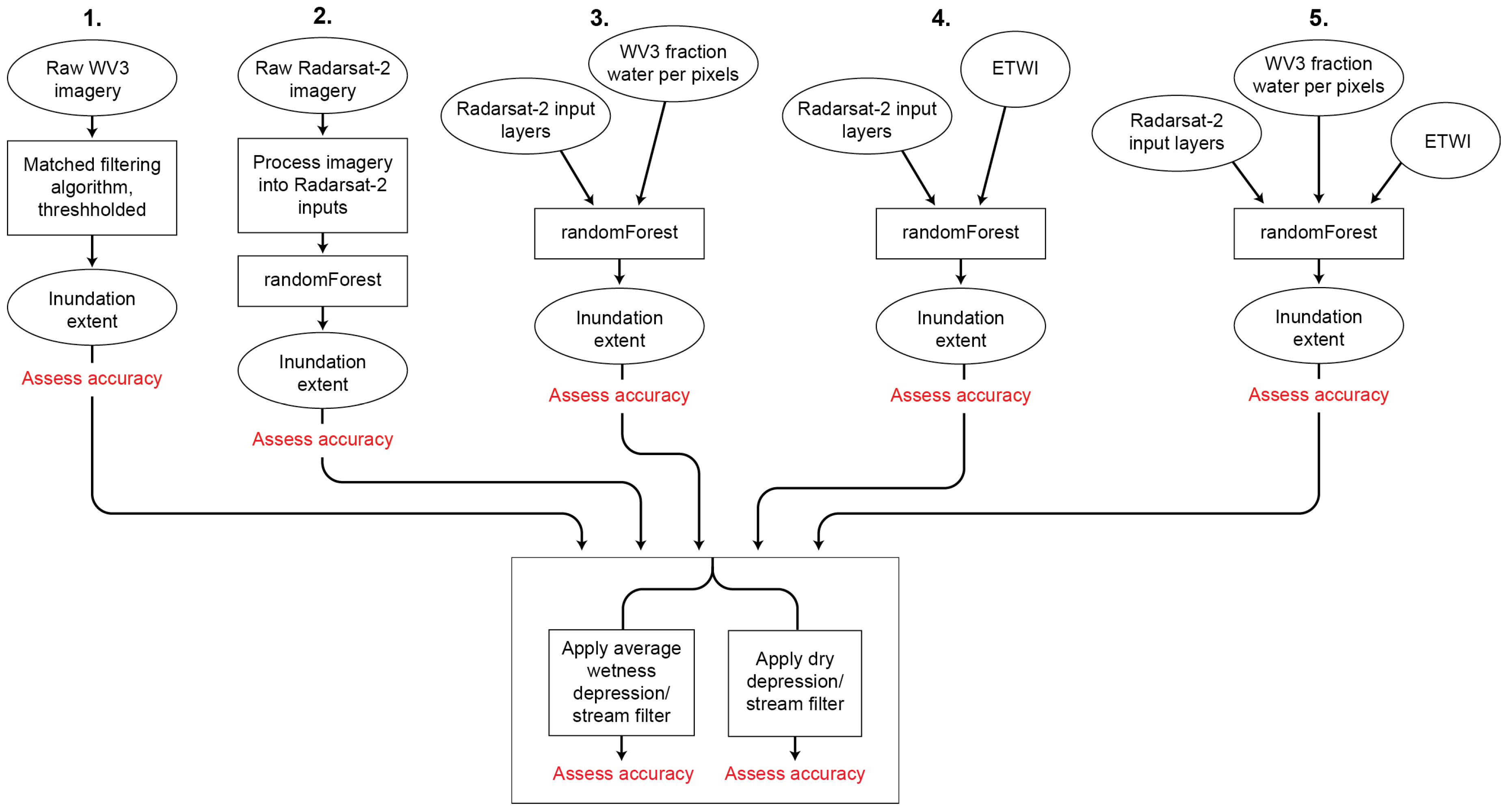
2.4. Inundation Mapping and Assessment
2.4.1. Worldview-3 Processing
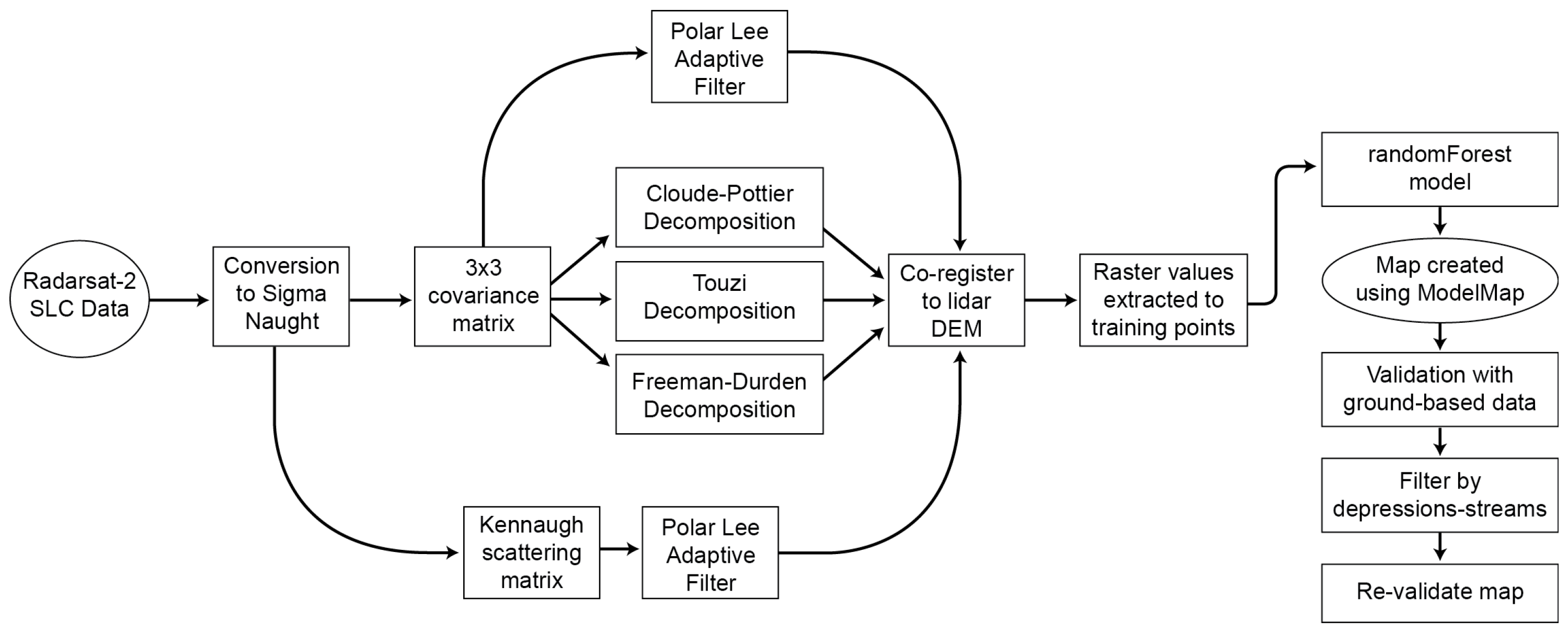
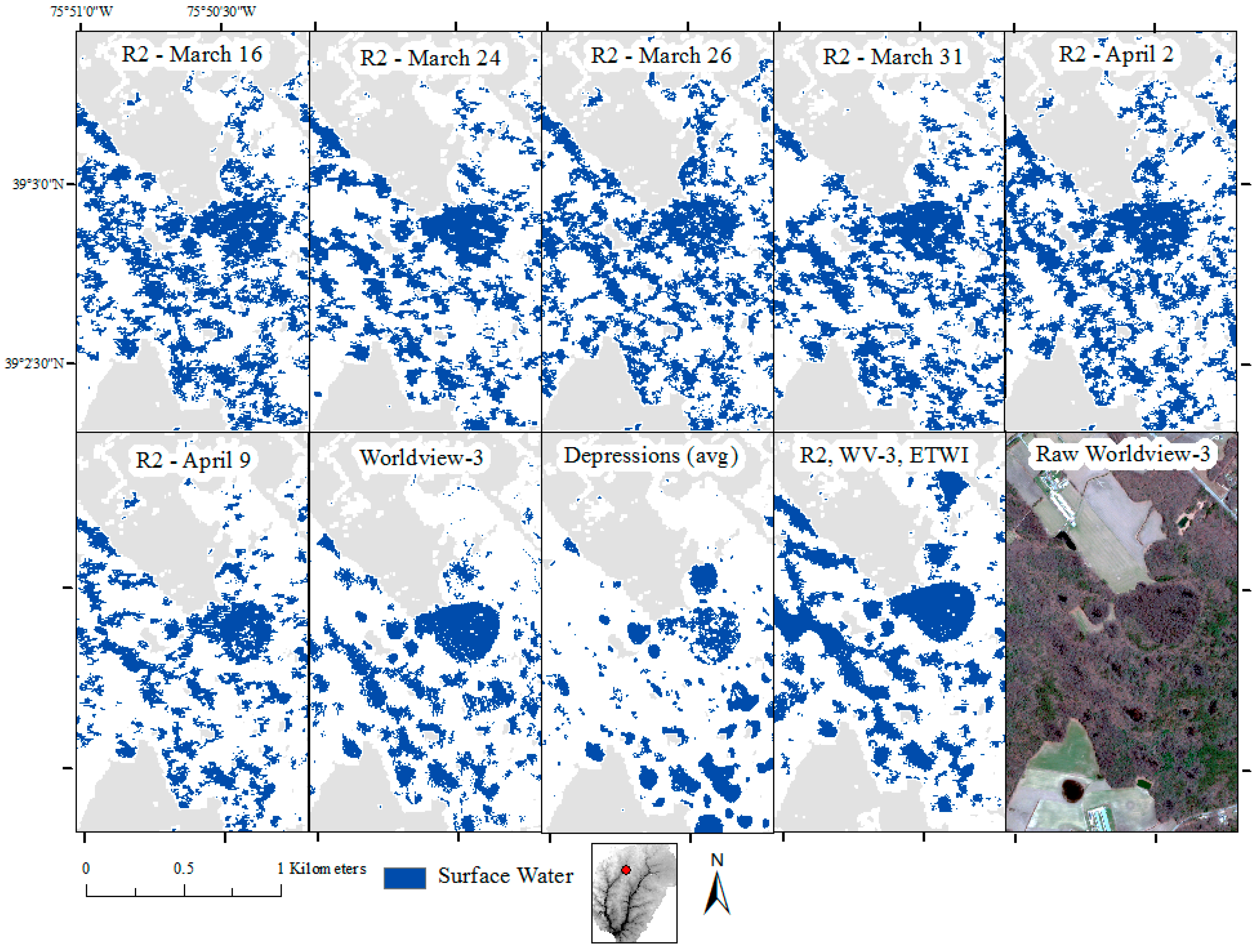
2.4.2. Radarsat-2 Processing
2.4.3. Integrated Inundation Mapping
2.4.4. Accuracy Assessment
3. Results
3.1. Impact of Wetness Conditions on Lidar-Based Depression Identification
3.2. Accuracies of Inundation Products Derived Using Different Data Sources
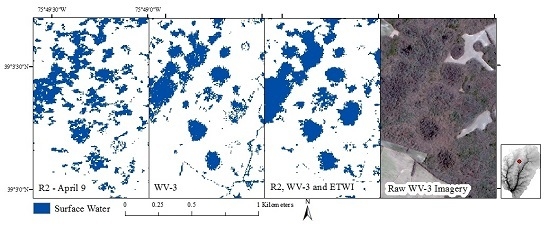
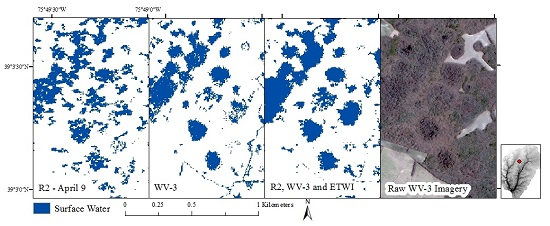
3.3. Effectiveness of Multi-Source Data Integration for Inundation Mapping
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tiner, R.W. Geographically isolated wetlands of the United States. Wetlands 2003, 23, 494–516. [Google Scholar] [CrossRef]
- Winter, T.C.; Rosenberry, D.O. Hydrology of prairie pothole wetlands during drought and deluge: A 17-year study of the Cottonwood Lake wetland complex in North Dakota in the perspective of longer term measured and proxy hydrological records. Clim. Chang. 1998, 40, 189–209. [Google Scholar] [CrossRef]
- Lane, C.R.; D’Amico, E. Calculating the ecosystem service of water storage in isolated wetlands using lidar in North Central Florida, USA. Wetlands 2010, 30, 967–977. [Google Scholar] [CrossRef]
- Vining, K.C. Simulation of Streamflow and Wetland Storage, Starkweather Coulee Subbasin, North Dakota, Water Years 1981–98; Water-Resources Investigations Report 2002-4113; U.S. Geological Survey: Bismark, ND, USA, 2002; pp. 1–28.
- Yang, C.; Hao, Z.; Yu, Z.; Lin, Z.; Liu, S. Analysis and simulation of human activity impact on streamflow in the Huaihe River basin with a large-scale hydrologic model. J. Hydrometeorol. 2010, 11, 810–821. [Google Scholar] [CrossRef]
- Euliss, N.H., Jr.; Gleason, R.A.; Olness, A.; McDougal, R.L.; Murkin, H.R.; Roberts, R.D.; Bourbonniere, R.A.; Warner, B.G. North American prairie wetlands are important nonforested land-based carbon storage sites. Sci. Total Environ. 2006, 361, 179–188. [Google Scholar] [CrossRef] [PubMed]
- Poff, N.L.; Allan, J.D.; Bain, M.B.; Karr, J.R.; Prestegaard, K.L.; Richter, B.; Sparks, R.; Stromberg, J. The natural flow regime: A new paradigm for riverine conservation and restoration. BioScience 1997, 47, 769–784. [Google Scholar] [CrossRef]
- Horritt, M.S.; Di Baldassere, G.; Bates, P.D.; Brath, A. Comparing the performance of 2-D finite element and finite volume models of floodplain inundation using airborne SAR imagery. Hydrol. Process. 2007, 21, 2745–2759. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, C.; Ticehurst, C.; Merrin, L.; Thew, P. An evaluation of MODIS daily and 8-day composite products for floodplain and wetland inundation mapping. Wetlands 2013, 33, 823–835. [Google Scholar] [CrossRef]
- Downing, D.; Nadeau, T.L.; Kwok, R. Technical and scientific challenges in implementing Rapanos “Water of the United States”. Nat. Resour. Environ. 2007, 22, 45–63. [Google Scholar]
- White, D.C.; Lewis, M.M. A new approach to monitoring spatial distribution and dynamics of wetlands and associated flows of Australian Great Artesian Basin springs using QuickBird satellite imagery. J. Hydrol. 2011, 408, 140–152. [Google Scholar] [CrossRef]
- Cohen, M.J.; Creed, I.F.; Alexander, L.; Basu, N.B.; Calhoun, A.J.; Craft, C.; D’Amico, E.; DeKeyser, E.; Fowler, L.; Golden, H.E.; et al. Do geographically isolated wetlands influence landscape functions? Proc. Natl. Acad. Sci. USA 2016, 113, 1978–1986. [Google Scholar] [CrossRef] [PubMed]
- Rains, M.C.; Dahlgren, R.A.; Fogg, G.E.; Harter, T.; Williamson, R.J. Geological control of physical and chemical hydrology in California vernal pools. Wetlands 2008, 28, 347–362. [Google Scholar] [CrossRef]
- Golden, H.E.; Sander, H.A.; Lane, C.R.; Zhao, C.; Price, K.; D’Amico, E.; Christensen, J.R. Relative effects of geographically isolated wetlands on streamflow: A watershed-scale analysis. Ecohydrology 2016, 9, 21–38. [Google Scholar] [CrossRef]
- Sethre, P.R.; Rundquist, B.C.; Todhunter, P.E. Remote detection of Prairie Pothole ponds in the Devils Lake basin, North Dakota. GISci. Remote Sens. 2005, 42, 277–296. [Google Scholar] [CrossRef]
- Rover, J.; Wylie, B.K.; Ji, L. A self-trained classification technique for producing 30 m percent-water maps from Landsat data. Int. J. Remote Sens. 2010, 31, 2197–2203. [Google Scholar] [CrossRef]
- Frohn, R.C.; Reif, M.; Lane, C.R.; Autrey, B.C. Satellite remote sensing of isolated wetlands using object-oriented classification of Landsat-7 data. Wetlands 2009, 29, 931–941. [Google Scholar] [CrossRef]
- Harsaynyi, J.C.; Chang, C.I. Hyperspectral image classification and dimensionality reduction: An orthogonal subspace projection approach. IEEE Trans. Geosci. Remote Sens. 1994, 32, 779–784. [Google Scholar] [CrossRef]
- Huang, C.; Peng, Y.; Lang, M.; Yeo, I.Y.; McCarty, G. Wetland inundation mapping and change monitoring using Landsat and airborne lidar data. Remote Sens. Environ. 2014, 141, 231–242. [Google Scholar] [CrossRef]
- Halabisky, M.; Moskal, L.M.; Gillespie, A.; Hannam, M. Reconstructing semi-arid wetland surface water dynamics through spectral mixture analysis of a time series of Landsat satellite images (1984–2011). Remote Sens. Environ. 2016, 177, 171–183. [Google Scholar] [CrossRef]
- Vanderhoof, M.K.; Alexander, L.C.; Todd, M.J. Temporal and spatial patterns of wetland extent influence variability of surface water connectivity in the Prairie Pothole Region, United States. Landsc. Ecol. 2016, 31, 805–824. [Google Scholar] [CrossRef]
- Whiteside, T.G.; Bartolo, R.E. Use of WorldView-2 time series to establish a wetland monitoring program for potential offsite impacts of mine site rehabilitation. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 24–37. [Google Scholar] [CrossRef]
- Lang, M.W.; Kasischke, E.S. Using C-band synthetic aperture radar data to monitor forested wetland hydrology in Maryland’s Coastal Plain, USA. IEEE Trans. Geosci. Remote Sens. 2008, 4, 535–546. [Google Scholar] [CrossRef]
- Clewley, D.; Whitcomb, J.; Moghaddam, M.; McDonald, K.; Chapman, B.; Bunting, P. Evaluation of ALOS PALSAR data for high-resolution mapping of vegetated wetlands in Alaska. Remote Sens. 2015, 7, 7272–7297. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Affonso, A.G.; Barbosa, C.; Gastil-Buhl, M.; Novo, E.M.L.M. Wetlands of the lowland Amazon basin: Extent, vegetative cover, and dual-season inundated area as mapped with JERS-1 synthetic aperture radar. Wetlands 2015, 35, 745–756. [Google Scholar] [CrossRef]
- Schlaffer, S.; Chini, M.; Dettmering, D.; Wagner, W. Mapping wetlands in Zambia using seasonal backscatter signatures derived from ENVISaT ASaR time series. Remote Sens. 2016, 8, 1–24. [Google Scholar] [CrossRef]
- Lang, M.W.; Kasischke, E.S.; Prince, S.D.; Pittman, K.W. Assessment of C-band synthetic aperture radar data for mapping and monitoring coastal plain forested wetlands in the Mid-Atlantic Region, U.S.A. Remote Sens. Environ. 2008, 112, 4120–4130. [Google Scholar] [CrossRef]
- Pistolesi, L.L.; Ni-Meister, W.; McDonald, K.C. Mapping wetlands in the Hudson Highlands ecoregions with ALOS PALSAR: An effort to identify potential swamp forest habitat for golden-winged warblers. Wetl. Ecol. Manag. 2015, 23, 95–112. [Google Scholar] [CrossRef]
- Corcoran, J.M.; Knight, J.F.; Gallant, A.L. Influence of multi-source and multi-temporal remotely sensed and ancillary data on the accuracy of random forest classification of wetlands in Northern Minnesota. Remote Sens. 2013, 5, 3212–3228. [Google Scholar] [CrossRef]
- Margono, B.A.; Bwangoy, J.R.B.; Potapov, P.V.; Hansen, M.C. Mapping wetlands in Indonesia using Landsat and PALSAR data-sets and derived topographical indices. Geo-Spat. Inf. Sci. 2014, 17, 60–71. [Google Scholar] [CrossRef]
- Simon, R.N.; Tormos, T.; Danis, P.A. Very high spatial resolution optical and radar imagery in tracking water level fluctuations of a small inland reservoir. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 36–39. [Google Scholar] [CrossRef]
- Lang, M.W.; McCarty, G.W. Lidar intensity for improved detection of inundation below the forest canopy. Wetlands 2009, 29, 1166–1178. [Google Scholar] [CrossRef]
- Maxa, M.; Bolstad, P. Mapping northern wetlands with high resolution satellite images and lidar. Wetlands 2009, 29, 248–260. [Google Scholar] [CrossRef]
- Gleason, R.A.; Tangen, B.A.; Laubhan, M.K.; Kermes, K.E.; Euliss, N.H., Jr. Estimating Water Storage Capacity of Existing and Potentially Restorable Wetland Depressions in a Subbasin of the Red River of the North; Open-File Report 2007-1159; U.S. Geological Survey: Reston, VA, USA, 2007; pp. 1–36.
- Huang, S.; Young, C.; Feng, M.; Heidemann, K.; Cushing, M.; Mushet, D.M.; Liu, S. Demonstration of a conceptual model for using lidar to improve the estimation of floodwater mitigation potential of Prairie Pothole Region wetlands. J. Hydrol. 2011, 405, 417–426. [Google Scholar] [CrossRef]
- Wu, Q.; Lane, C.; Liu, H. An effective method for detecting potential woodland vernal pools using high-resolution lidar data and aerial imagery. Remote Sens. 2014, 6, 11444–11467. [Google Scholar] [CrossRef]
- Wu, Q.; Deng, C.; Chen, Z. Automated delineation of karst sinkholes from lidar-derived digital elevation models. Geomorphology 2016, 266, 1–10. [Google Scholar] [CrossRef]
- Creed, I.F.; Sanford, S.E.; Beall, F.D.; Molot, L.A.; Dillon, P.J. Cryptic wetlands: Integrating hidden wetlands in regression models of the export of dissolved organic carbon from forested landscapes. Hydrol. Process. 2003, 17, 3629–3648. [Google Scholar] [CrossRef]
- Sharitz, R.R.; Gibbons, J.W. The Ecology of Evergreen Shrub Bogs, Pocosins and Carolina Bays of the Southeast: A Community Profile; FWS/OBS-82/04; U.S. Fish and Wildlife Service, Office of Biological Services: Washington, DC, USA, 1982; pp. 1–93.
- Fenstermacher, D.E.; Rabenhorst, M.C.; Lang, M.W.; McCarty, G.W.; Needelman, B.A. Distribution, morphometry, and land use of Delmarva Bays. Wetlands 2014, 34, 1219–1228. [Google Scholar] [CrossRef]
- Prouty, W.F. Carolina bays and their origin. Geol. Soc. Am. Bull. 1952, 63, 167–224. [Google Scholar] [CrossRef]
- Schalles, J.F.; Shure, D.J. Hydrology, community structure and productivity patterns of a dystrophic Carolina bay wetland. Ecol. Monogr. 1989, 59, 365–385. [Google Scholar] [CrossRef]
- Lide, R.F.; Meentemeyer, V.G.; Pinder, J.E., III; Beatty, L.M. Hydrology of a Carolina bay located on the upper coastal plain of western South Carolina. Wetlands 1995, 15, 47–57. [Google Scholar] [CrossRef]
- Sun, G.; Callahan, T.J.; Pyzoha, J.E.; Trettin, C.C. Modeling the climatic and subsurface stratigraphy controls on the hydrology of a Carolina bay wetland in South Carolina, USA. Wetlands 2006, 26, 567–580. [Google Scholar] [CrossRef]
- Pyzoha, J.E.; Callahan, T.J.; Sun, G.; Trettin, C.C.; Miwa, M. A conceptual hydrologic model for a forested Carolina bay depressional wetland on the Coastal Plain of South Carolina, USA. Hydrol. Process. 2008, 22, 2689–2698. [Google Scholar] [CrossRef]
- Lang, M.; McCarty, G.; Oesterling, R. Topographic metrics for improved mapping of forested wetlands. Wetlands 2012, 33, 141–155. [Google Scholar] [CrossRef]
- Lowrance, R.; Altier, L.S.; Newbold, D.; Schnabel, R.R.; Groffman, P.M.; Denver, J.M.; Correll, D.L.; Gilliam, J.W.; Robinson, J.L.; Brinsfield, R.B.; et al. Water quality functions of riparian forest buffers in Chesapeake Bay watersheds. Environ. Manag. 1997, 21, 687–712. [Google Scholar] [CrossRef]
- Homer, C.; Dewitx, J.; Yang, L.; Jin, S.; Danielson, P.; Xian, G.; Coulston, J.; Herold, N.; Wickham, J.; Megown, K. Completion of the 2011 National Land Cover Database for the conterminous United States—Representing a decade of land cover change information. Photogramm. Eng. Remote Sens. 2015, 81, 345–354. [Google Scholar]
- Lang, M.; McDonough, O.; McCarty, G.; Oesterling, R.; Wilen, B. Enhanced detection of wetland-stream connectivity using lidar. Wetlands 2012, 32, 461–473. [Google Scholar] [CrossRef]
- National Oceanic Atmospheric Administration, National Climatic Data Center. Climate Indices Data Retrieval. Available online: http://www7.ncdc.noaa.gov/CDO/CDODivisionalSelect.jsp# (accessed on 12 September 2016).
- Lindsay, J.B. The Whitebox Geospatial Analysis Tools project and open-access GIS. In Proceedings of the GIS Research UK 22nd Annual Conference, Glasgow, UK, 16–18 April 2014.
- Matheron, G. The intrinsic random functions and their applications. Adv. Appl. Probab. 1973, 5, 439–468. [Google Scholar] [CrossRef]
- Ahrens, B.D.C. Identifying Closed Depressions in the Hummocky Topography of the Waterloo and Paris-Galt-Guelph Morraines of Southwestern Ontario. Master’s Thesis, University of Guelph, Guelph, ON, Canada, 2012. [Google Scholar]
- Wang, L.; Liu, H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Beven, K.; Kirkby, M. A physically based variable contributing area model of basin hydrology. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef]
- Freeman, T.A. Calculating catchment-area with divergent flow based on a regular grid. Comput. Geosci. 1991, 17, 413–422. [Google Scholar] [CrossRef]
- Bohner, J.; Selige, T. Spatial prediction of soil attributes using terrain analysis and climate regionalisation. In SAGA Analysis and Modelling Applications; Bohner, J., McCloy, K., Strobl, J., Eds.; Verlag Erich Goltze GmbH & Co: Göttingen, Germany, 2006; Volume 115, pp. 13–28. [Google Scholar]
- Adler-Golden, S.M.; Berk, A.; Bernstein, L.S.; Richtsmeierl, S.; Acharyal, P.K.; Matthew, M.W.; Anderson, G.P.; Allred, C.L.; Jeong, L.S.; Chetwynd, J.H. FLAASH, a Modtran4 atmospheric correction package for hyperspectral data retrievals and simulations. In Proceedings of the Summaries of the Seventh JPL Airborne Earth Science Workshop, Pasadena, CA, USA, 12–16 January 1998; pp. 1–6.
- Adler-Golden, S.M.; Matthew, M.W.; Bernstein, L.S.; Levine, R.Y.; Berk, A.; Richtsmeier, S.C.; Acharya, P.K.; Anderson, G.P.; Felde, G.; Gardner, J.; et al. Atmospheric correction for shortwave spectral imagery based on MODTRAN4. SPIE Proc. Imaging Spectrom. 1999, 3753, 61–69. [Google Scholar]
- Green, A.A.; Berman, M.; Switzer, P.; Craig, M.D. A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74. [Google Scholar] [CrossRef]
- Turin, G. An introduction to matched filters. IRE Trans. Inf. Theory 1960, 6, 311–329. [Google Scholar] [CrossRef]
- Parmuchi, M.; Karszenbaum, H.; Kandus, P. Mapping wetlands using multi-temporal RADARSAT-1 data and a decision-based classifier. Can. J. Remote Sens. 2002, 28, 175–186. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Cloude, S.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Touzi, R.; Deschamps, A.; Rother, G. Wetland characterization using polarimetric RADARSAT-2 capability. Can. J. Remote Sens. 2007, 33, S56–S67. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Baghdadi, N.; Bernier, M.; Gauthier, R.; Neeson, I. Evaluation of C-band SAR data for wetlands mapping. Int. J. Remote Sens. 2001, 22, 71–88. [Google Scholar] [CrossRef]
- Henderson, F.; Lewis, A. Radar detection of wetland ecosystems: A review. Int. J. Remote Sens. 2008, 29, 5809–5835. [Google Scholar] [CrossRef]
- Schmitt, A.; Brisco, B. Wetland monitoring using the curvelet-based change detection method on polarimetric SAR imagery. Water 2013, 5, 1036–1051. [Google Scholar] [CrossRef]
- Schmitt, A.; Wendleder, A.; Hinz, S. The Kennaugh element framework for multi-scale, multi-polarized, multi-temporal and multi-frequency SAR image preparation. ISPRS J. Photogramm. Remote Sens. 2015, 102, 122–139. [Google Scholar] [CrossRef]
- Kandus, P.; Karszenbaum, H.; Pultz, T.; Parmuchi, G.; Bava, J. Influence of flood conditions and vegetation status on the radar backscatter of wetland ecosystems. Can. J. Remote Sens. 2001, 6, 651–662. [Google Scholar] [CrossRef]
- Yuan, T.; Lee, H.; Jung, H.C. Toward estimating wetland water level changes based on hydrological sensitivity analysis of PALSAR backscattering coefficients over different vegetation fields. Remote Sens. 2015, 7, 3153–3183. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Breiman and Cutler’s Random Forests for Classification and Regression; R Package Version 4.6-12; R Foundation for Statistical Computing: Vienna, Austria, 2015; pp. 1–29. [Google Scholar]
- Freeman, E.A.; Frescino, T.S.; Moisen, G.G. ModelMap: An R Package for Model Creation and Map Production; R Package Version 4.6-12; R Foundation for Statistical Computing: Vienna, Austria, 2016; pp. 1–85. [Google Scholar]
- Murphy, M.A.; Evans, J.S.; Storfer, A. Quantifying Bufo boreas connectivity in Yellowstone National Park with landscape genetics. Ecology 2010, 91, 252–261. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Uriarte, R.; Alvarez de Andrés, S. Gene selection and classification of microarray data using random forest. BMC Bioinf. 2006, 7, 3. [Google Scholar] [CrossRef] [PubMed]
- Fleiss, J. L. Statistical Methods for Rates and Proportions, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1981. [Google Scholar]
- Forbes, A.D. Classification-algorithm evaluation: Five performance measures based on confusion matrices. J. Clin. Monit. 1995, 11, 189–206. [Google Scholar] [CrossRef] [PubMed]
- Padilla, M.; Stehman, S.V.; Chuvieco, E. Validation of the 2008 MODIS-MCD45 global burned area product using stratified random sampling. Remote Sens. Environ. 2014, 144, 187–196. [Google Scholar] [CrossRef]
- Foody, G.M. Thematic map comparison: Evaluating the statistical significance of differences in classification accuracy. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]
- Stolt, M.H.; Baker, J.C. Evaluation of National Wetland Inventory maps to inventory wetlands in the southern blue ridge of Virginia. Wetlands 1995, 15, 346–353. [Google Scholar] [CrossRef]
- Tiner, R.W. Wetland Indicators: A Guide to Wetland Identification, Delineation, Classification, and Mapping; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Cable, J.W.; Kovacs, J.M.; Shang, J.; Jiao, X. Multi-temporal polarimetric RADARSAT-2 for land cover monitoring in Northeastern Ontario, Canada. Remote Sens. 2014, 6, 2372–2392. [Google Scholar] [CrossRef]
- Marechal, C.; Pottier, E.; Hubert-Moy, L.; Rapinel, S. One year wetland survey investigations from quad-pol RADARSAT-2 time-series SAR images. Can. J. Remote Sens. 2012, 38, 240–252. [Google Scholar] [CrossRef]
- Brisco, B.; Touzi, R.; van der Sanden, J.J.; Charbonneau, F.; Pultz, T.J.; D’Iorio, M. Water resource applications with RADARSAT-2—A preview. Int. J. Digit. Earth 2008, 1, 130–147. [Google Scholar] [CrossRef]
- Ghioca-Robrecht, D.M.; Johnston, C.A.; Tulbure, M.G. Assessing the use of multi-season QuickBird imagery for mapping invasive species in a Lake Erie coastal marsh. Wetlands 2008, 28, 1028–1039. [Google Scholar] [CrossRef]
- Dore, M.H.I. Climate change and changes in global precipitation patterns: What do we know? Environ. Int. 2005, 31, 1167–1181. [Google Scholar] [CrossRef] [PubMed]
- Dettinger, M. Climate change, atmospheric rivers, and floods in California—A multimodel analysis of storm frequency and magnitude changes. J. Am. Water Res. Assoc. 2011, 47, 514–523. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product | Source | Acquisition Date |
|---|---|---|
| Average Wetness Depressions | Lidar DEM | April–June 2003, March–April 2006, April 2007 |
| Dry Depressions | Lidar DEM | 24 December 2007 |
| Semi-automated Stream Network | Lidar DEM | April–June 2003, March–April 2006, April 2007 |
| ETWI | Lidar DEM | 24 December 2007 |
| Inundation extent | Radarsat-2 | 16, 24, 26 and 31 March, 2 and 9 April 2015 |
| Inundation extent | Worldview-3 | 6 April 2015 |
| Inundation extent | Radarsat-2, Worldview-3 | 9 April 2015 and 6 April 2015 |
| Inundation extent | Radarsat-2, ETWI | 9 April 2015, 24 December 2007 |
| Inundation extent | Radarsat-2, Worldview-3, ETWI | 9 April 2015, 6 April 2015, 24 December 2007 |
| Satellite | Acquisition Date | Polarization (Beam Mode) | Incidence Angle (Near to Far) | Orbit (Look Direction) | Precip. 7 Days Prior (cm) | Precip. 2 Days Prior (cm) |
| Radarsat-2 | 16 March 2015 | Polarimetric (FQ18) | 37.3–38.9 | Ascending (Right) | 3.0 | 2.0 |
| Radarsat-2 | 24 March 2015 | Polarimetric (FQ12) | 31.4–33.0 | Descending (Right) | 1.8 | 0.0 |
| Radarsat-2 | 26 March 2015 | Polarimetric (FQ29) | 46.8–48.0 | Ascending (Right) | 1.9 | 0.0 |
| Radarsat-2 | 31 March 2015 | Polarimetric (FQ18) | 37.4–38.9 | Descending (Right) | 1.6 | 0.1 |
| Radarsat-2 | 2 April 2015 | Polarimetric (FQ23) | 41.9–43.3 | Ascending (Right) | 1.8 | 0.2 |
| Radarsat-2 | 9 April 2015 | Polarimetric (FQ18) | 37.4–38.9 | Ascending (Right) | 0.8 | 0.6 |
| Satellite | Acquisition Date | Number of Bands, Spectral Range | Incidence Angle (near to far) | Scan Direction | Precip. 7 Days Prior (cm) | Precip. 2 Days Prior (cm) |
| Worldview-3 | 6 April 2015 | 8, 400–1040 nm | 29.5–31.2 | Reverse | 0.6 | 0.2 |
| Output | Raster | 16 March 2015 | 24 March 2015 | 26 March 2015 | 31 March 2015 | 2 April 2015 | 9 April 2015 |
|---|---|---|---|---|---|---|---|
| Covariance matrix | Covariance Matrix 1,1 (ShhS*hh) | x | x | x | x | x | x |
| Covariance Matrix 2,2 (ShvS*hv) | x | ||||||
| Covariance Matrix 3,3 (SvvS*vv) | x | x | x | x | |||
| Kennaugh scattering matrix | Element 2,2 of Kennaugh matrix (k1) | x | x | x | x | ||
| Element 3,3 of Kennaugh matrix (k2) | x | x | x | x | x | ||
| Element 4,4 of Kennaugh matrix (k3) | x | x | x | ||||
| Element 1,2 of Kennaugh matrix (k4) | x | x | x | x | |||
| Element 1,3 of Kennaugh matrix (k5) | x | ||||||
| Element 1,4 of Kennaugh matrix (k6) | x | ||||||
| Element 2,4 of Kennaugh matrix (k8) | x | ||||||
| Element 3,4 of Kennaugh matrix (k7) | x | ||||||
| Freeman–Durden decomposition | Power contributions due to double-bounce | x | x | x | |||
| Power contributions due to volume scattering | x | x | x | ||||
| Cloude–Pottier Decomposition | Entropy | x | |||||
| Alpha Angle | x | x | |||||
| Beta Angle | x | x | x | x | |||
| Eigenvalues—Lambda 1 | x | x | |||||
| Eigenvalues—Lambda 2 | x | ||||||
| Eigenvalues—Lambda 3 | x | x | |||||
| Real component of element 1 of Eigenvector 2 | x | ||||||
| Touzi Decomposition | Dominant Eigenvalue | x | |||||
| Dominant Touzi Alpha_S Parameter | x | x | x | x | |||
| Dominant Touzi Phase | |||||||
| Dominant Tau Angle (Helicity) | x | ||||||
| Secondary Eigenvalue | x | x | x | ||||
| Tertiary Eigenvalue | x | x |
| Depression Abundance | Avg Condition DEM | Dry Condition DEM | Increase in Depression Capture with Dry Conditions (%) |
|---|---|---|---|
| Depression Count | 2289 | 3686 | 37.9 |
| Depression count per ha | 0.42 | 0.68 | |
| Total depression area (ha) | 428.2 | 697.2 | 38.6 |
| Depression cover (%) | 8 | 13 | |
| Mean depression size (±s.d.) (m2) | 1870.7 ± 4792.4 (43.3 m × 43.3 m) | 1891.4 ± 6356.9 (43.5 m × 43.5 m) |
| Pre-Depression Filter | 16 March 2015 | 24 March 2015 | 26 March 2015 | 31 March 2015 | 2 April 2015 | 9 April 2015 | Mean Error/Accuracy | |
| Forest—Water Omission Error (%) | 23.5 | 20.0 | 23.0 | 28.0 | 27.5 | 27.5 | 26.6 | |
| Forest—Water Commission Error (%) | 29.2 | 21.6 | 29.7 | 31.8 | 28.2 | 28.2 | 26.4 | |
| Forest—Overall Accuracy (%) | 72.5 | 79.0 | 72.3 | 69.3 | 72.0 | 72.0 | 73.3 | |
| Forest—Dice Coefficient | 0.7 | 0.8 | 0.7 | 0.7 | 0.7 | 0.7 | ||
| Forest—Relative Bias | 0.1 | 0.0 | 0.1 | 0.1 | 0.0 | 0.0 | ||
| Significance (between dates) | a | a | a | a | a | b | ||
| Significance (pre-post filter) | a | a | a | a | a | a | ||
| Non-Forest—Water Omission Error (%) | 7.0 | 3.7 | 8.2 | 10.7 | 4.3 | 13.6 | 7.9 | |
| Non-Forest—Water Commission Error (%) | 3.9 | 3.4 | 1.3 | 9.2 | 2.9 | 7.7 | 4.7 | |
| Post-Depression Filter—Avg DEM | 16 March 2015 | 24 March 2015 | 26 March 2015 | 31 March 2015 | 2 April 2015 | 9 April 2015 | Mean Error/Accuracy | Mean Change pre to Post Filter (%) |
| Forest—Water Omission Error (%) | 25.0 | 20.5 | 24.0 | 29.0 | 30.5 | 24.5 | 25.6 | −1.0 |
| Forest—Water Commission Error (%) | 21.5 | 11.7 | 25.5 | 24.1 | 16.8 | 11.7 | 18.6 | −7.8 |
| Forest—Overall Accuracy (%) | 77.3 | 84.5 | 75.0 | 74.3 | 77.8 | 82.8 | 78.6 | 5.4 |
| Forest—Dice Coefficient | 0.8 | 0.8 | 0.8 | 0.7 | 0.8 | 0.8 | ||
| Forest—Relative Bias | 0.0 | −0.1 | 0.0 | −0.1 | −0.2 | −0.1 | ||
| Significance (between dates) | a,c | a,b | a,c | a,c | b,c | c | ||
| Significance (pre-post filter) | b | b | b | b | b | b | ||
| Post-Depression Filter—Dry DEM | 16 March 2015 | 24 March 2015 | 26 March 2015 | 31 March 2015 | 2 April 2015 | 9 April 2015 | Mean Error/Accuracy | Mean Change pre to Post Filter (%) |
| Forest—Water Omission Error (%) | 23.5 | 20.0 | 23.0 | 29.0 | 28.0 | 23.0 | 24.4 | −2.2 |
| Forest—Water Commission Error (%) | 21.1 | 14.0 | 25.2 | 25.3 | 17.2 | 13.0 | 19.3 | −7.1 |
| Forest—Overall Accuracy (%) | 78.0 | 83.5 | 75.5 | 73.5 | 78.5 | 82.8 | 78.6 | 5.4 |
| Forest—Dice Coefficient | 0.8 | 0.8 | 0.8 | 0.7 | 0.8 | 0.8 | ||
| Forest—Relative Bias | 0.0 | −0.1 | 0.0 | −0.1 | −0.1 | −0.1 | ||
| Significance (between dates) | a,b | a,b | b | a,b | a | a | ||
| Significance (pre-post filter) | b | c | b | b | c | b | ||
| Filter | Post-Depression Filter | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DEM | Avg Condition DEM | Dry Condition DEM | |||||||||||||
| Data Types | R2 | WV3 | R2 and WV3 | R2 and ETWI | R2, WV3, and ETWI | R2 | WV3 | R2 and WV3 | R2 and ETWI | R2, WV3, and ETWI | R2 | WV3 | R2 and WV3 | R2 and ETWI | R2, WV3, and ETWI |
| Water Omission Error (%) | 27.5 | 13.5 | 7.0 | 27.0 | 5.5 | 24.5 | 18.0 | 8.5 | 31.5 | 10.0 | 23.0 | 18.0 | 7.0 | 28.0 | 5.5 |
| Water Commission Error (%) | 28.2 | 8.5 | 14.7 | 18.9 | 9.6 | 11.7 | 4.7 | 8.5 | 13.2 | 5.3 | 13.0 | 4.7 | 9.3 | 14.8 | 6.0 |
| Overall Accuracy (%) | 72.0 | 89.3 | 88.5 | 78 | 92.3 | 82.8 | 89.0 | 91.5 | 79.3 | 92.5 | 82.8 | 89.0 | 91.8 | 79.8 | 94.3 |
| Dice Coefficient | 0.7 | 0.9 | 0.9 | 0.8 | 0.9 | 0.8 | 0.9 | 0.9 | 0.8 | 0.9 | 0.8 | 0.9 | 0.9 | 0.8 | 0.9 |
| Relative Bias | 0.0 | −0.1 | 0.1 | −0.1 | 0.0 | −0.1 | −0.1 | 0.0 | −0.2 | −0.1 | −0.1 | −0.1 | 0.0 | −0.2 | 0.0 |
| Significance | 2a | 2a | 1a | 2a | 1a | 2a | 2b | 1b | 2b | 1b | 2a | 2b | 1b | 2c | 1c |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vanderhoof, M.K.; Distler, H.E.; Mendiola, D.A.T.G.; Lang, M. Integrating Radarsat-2, Lidar, and Worldview-3 Imagery to Maximize Detection of Forested Inundation Extent in the Delmarva Peninsula, USA. Remote Sens. 2017, 9, 105. https://doi.org/10.3390/rs9020105
Vanderhoof MK, Distler HE, Mendiola DATG, Lang M. Integrating Radarsat-2, Lidar, and Worldview-3 Imagery to Maximize Detection of Forested Inundation Extent in the Delmarva Peninsula, USA. Remote Sensing. 2017; 9(2):105. https://doi.org/10.3390/rs9020105
Chicago/Turabian StyleVanderhoof, Melanie K., Hayley E. Distler, Di Ana Teresa G. Mendiola, and Megan Lang. 2017. "Integrating Radarsat-2, Lidar, and Worldview-3 Imagery to Maximize Detection of Forested Inundation Extent in the Delmarva Peninsula, USA" Remote Sensing 9, no. 2: 105. https://doi.org/10.3390/rs9020105
APA StyleVanderhoof, M. K., Distler, H. E., Mendiola, D. A. T. G., & Lang, M. (2017). Integrating Radarsat-2, Lidar, and Worldview-3 Imagery to Maximize Detection of Forested Inundation Extent in the Delmarva Peninsula, USA. Remote Sensing, 9(2), 105. https://doi.org/10.3390/rs9020105