An Integrated Approach to Generating Accurate DTM from Airborne Full-Waveform LiDAR Data



Abstract
:
1. Introduction
2. Materials and Methods
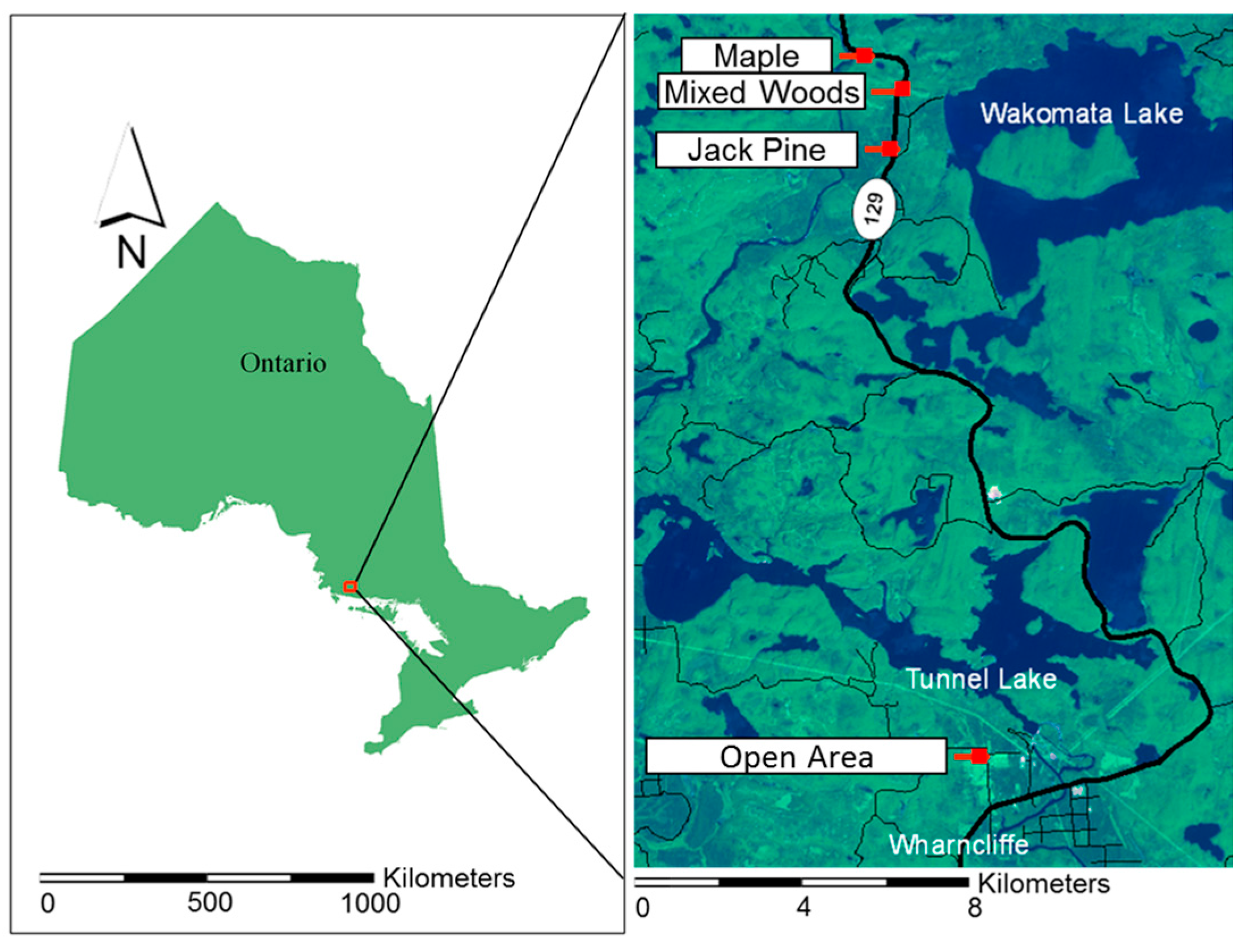
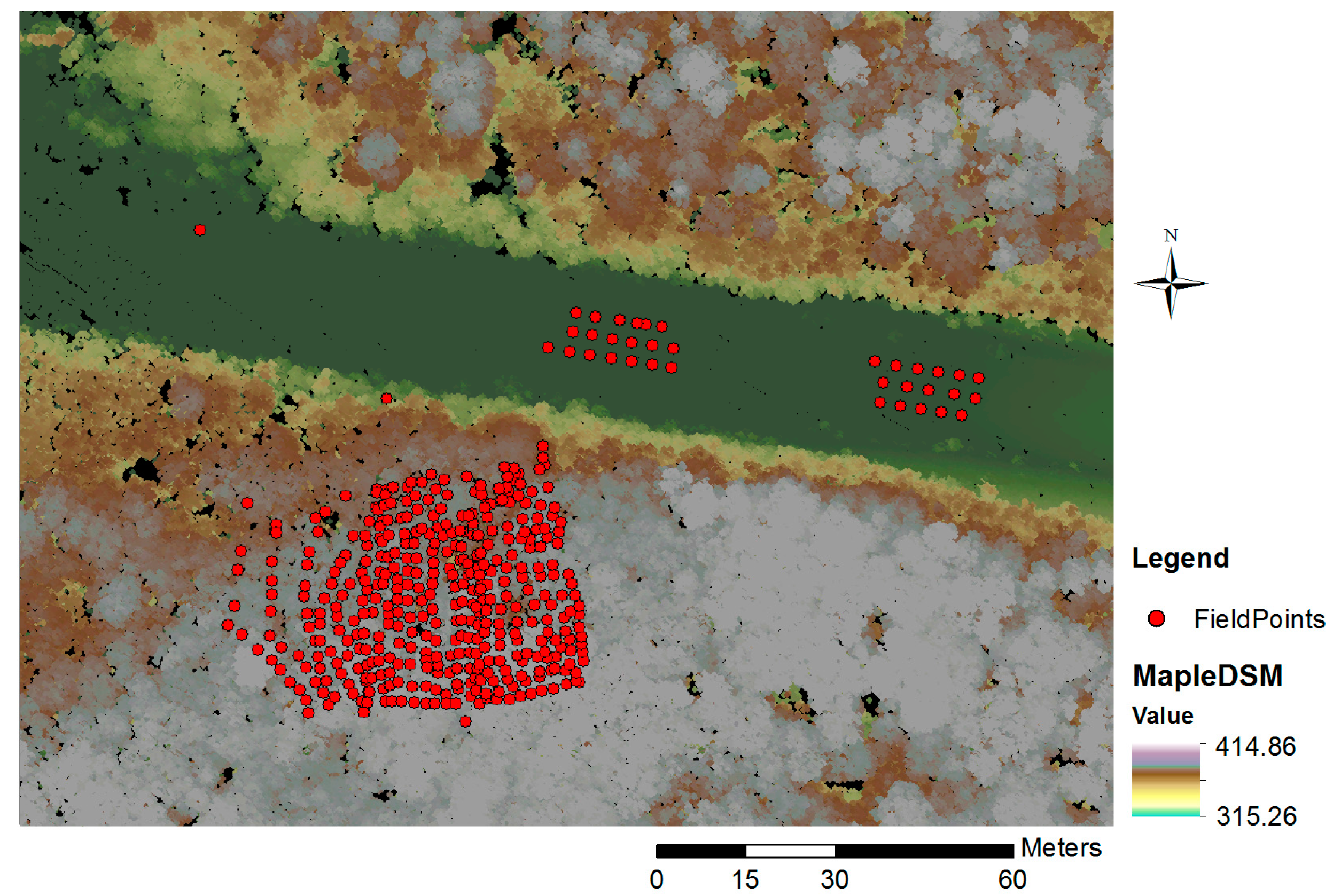
2.1. Study Area and Data Used
2.2. Methods
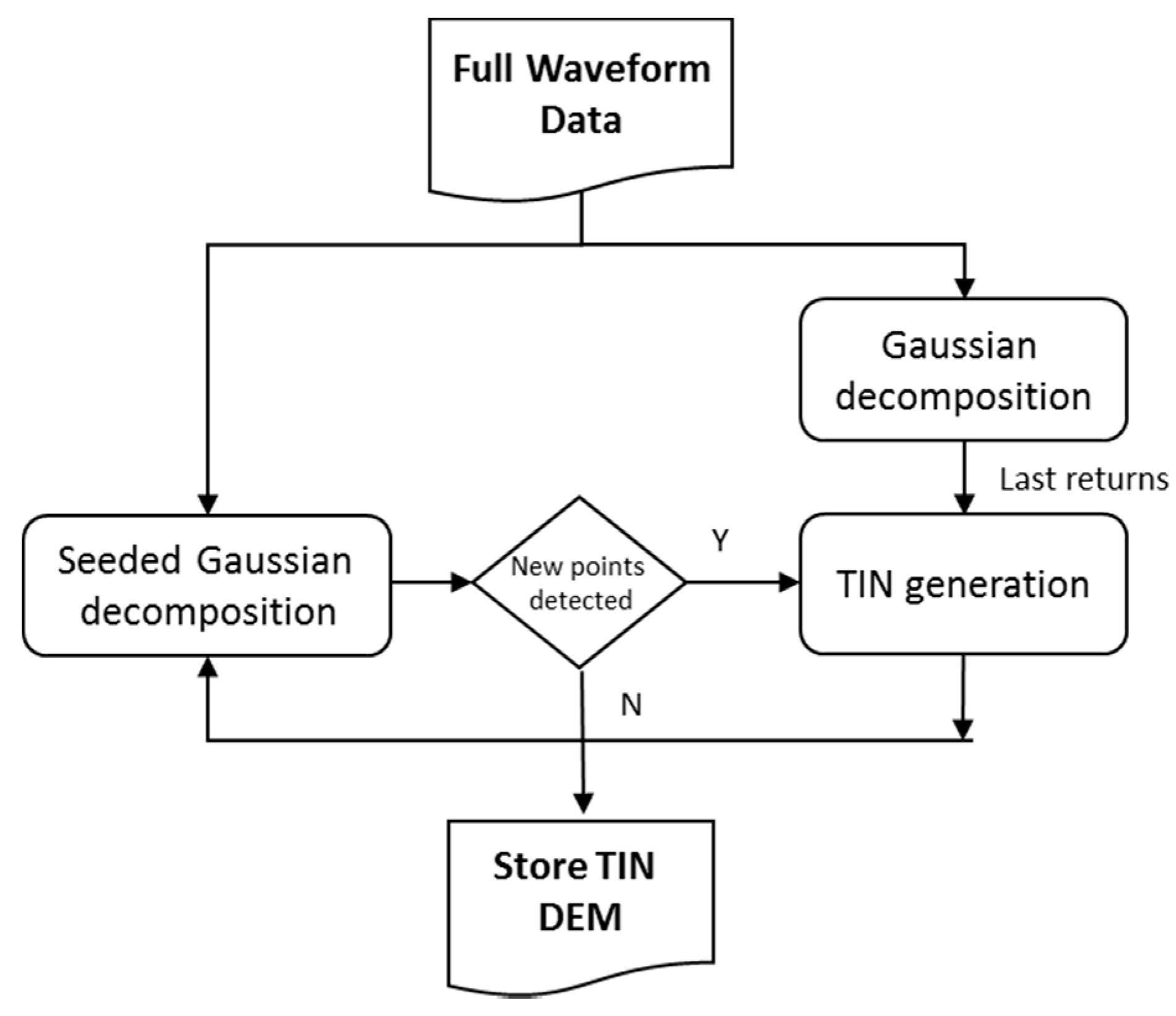
2.2.1. Overview
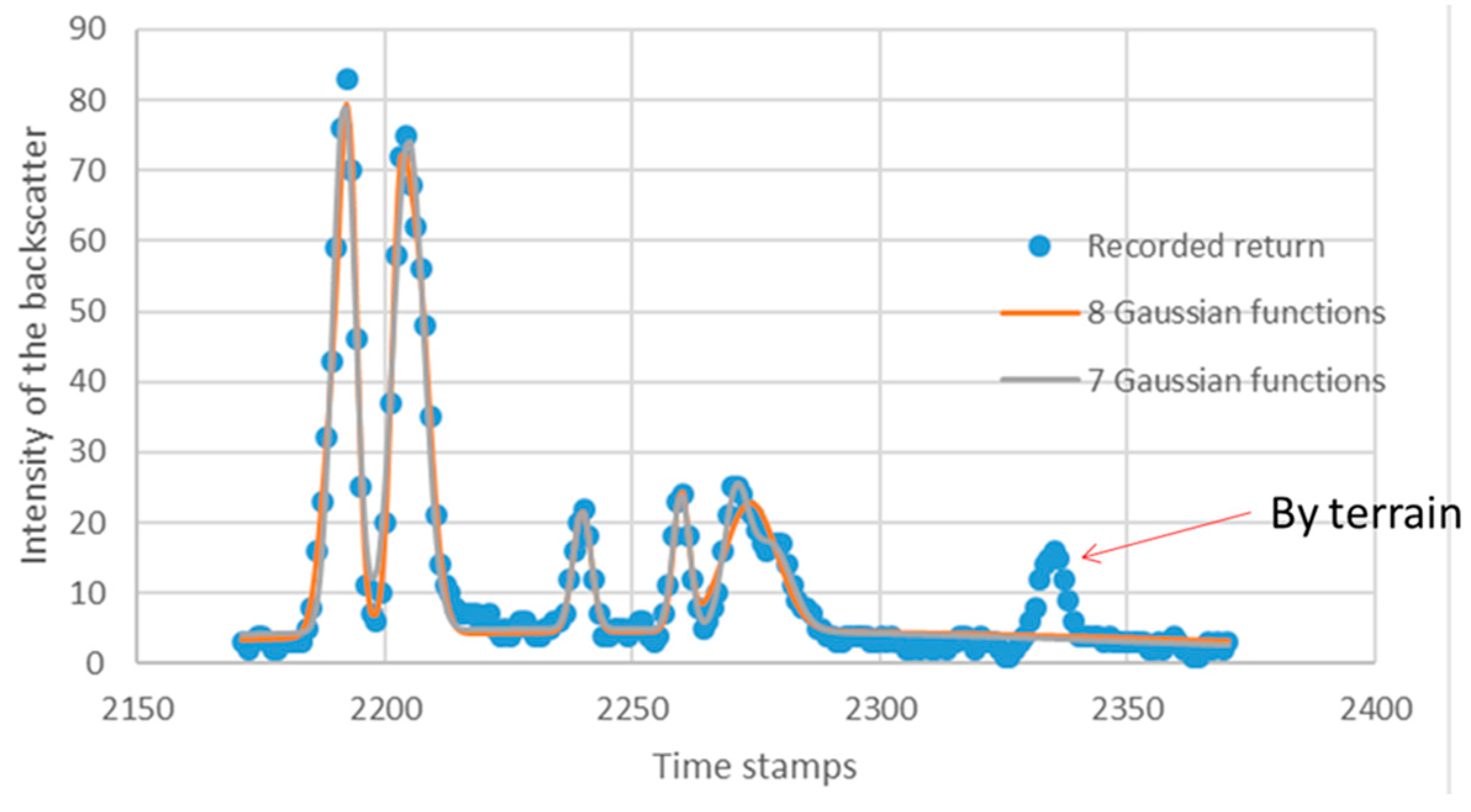
2.2.2. Gaussian Decomposition
2.2.3. TIN Generation
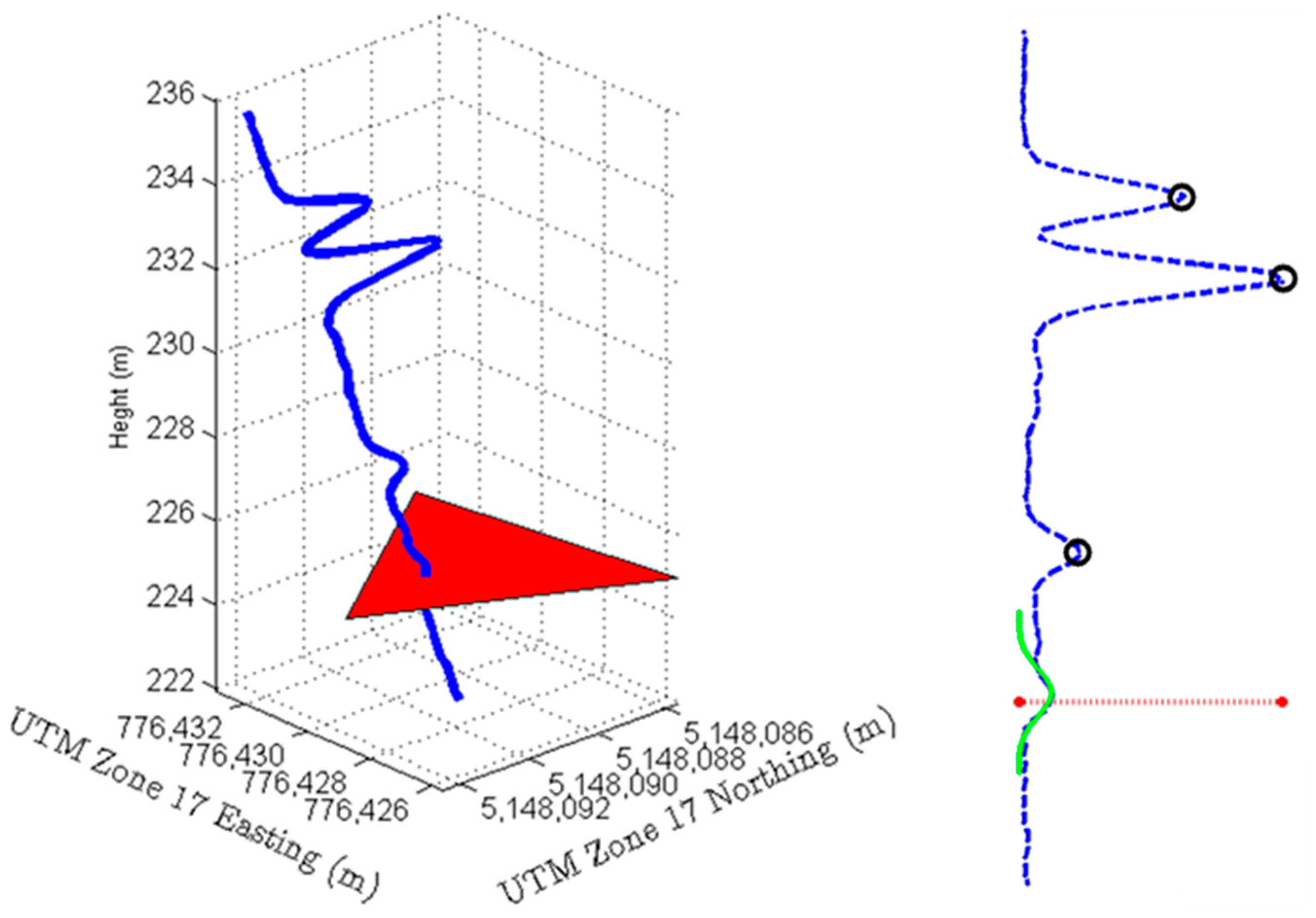
2.2.4. Seeded Gaussian Decomposition
2.2.5. Validation
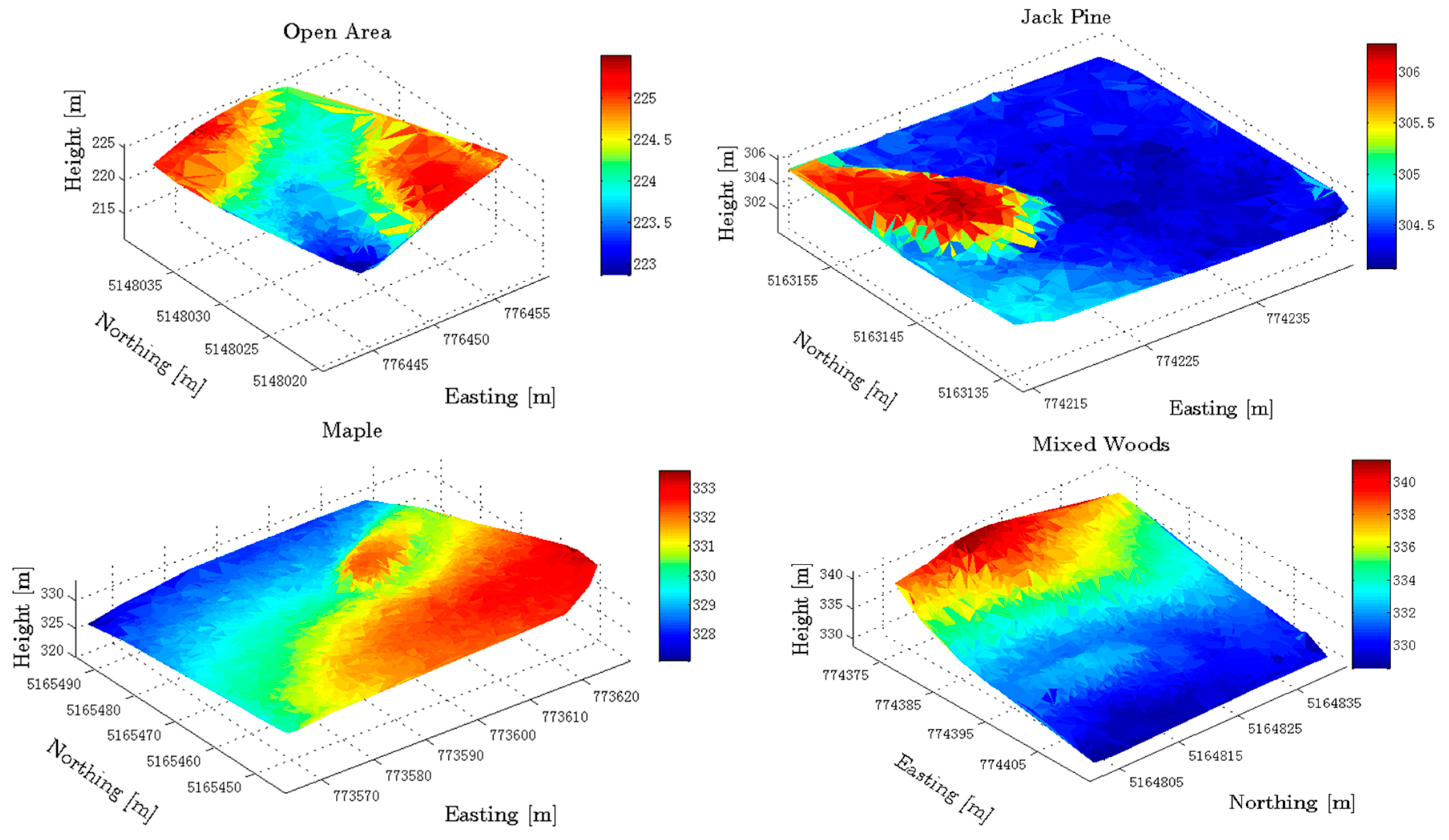
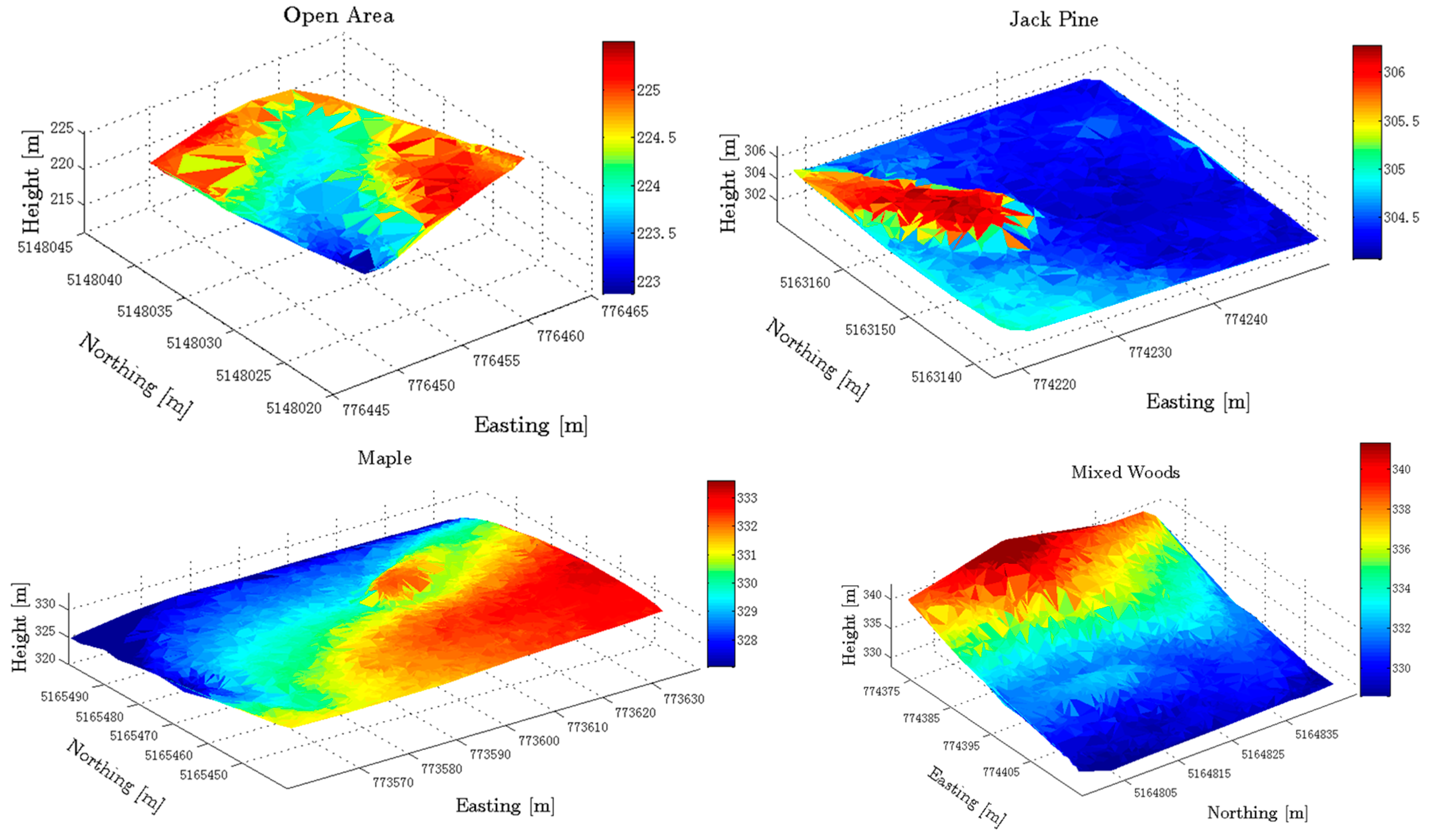
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gonga-Saholiariliva, N.; Gunnell, Y.; Petit, C.; Mering, C. Techniques for quantifying the accuracy of gridded elevation models and for mapping uncertainty in digital terrain analysis. Prog. Phys. Geogr. 2011, 35, 739–764. [Google Scholar] [CrossRef]
- Liu, X. Airborne LiDAR for DEM generation: Some critical issues. Prog. Phys. Geogr. 2008, 32, 31–49. [Google Scholar]
- Glennie, C. Rigorous 3D error analysis of kinematic scanning LiDAR systems. J. Appl. Geod. 2007, 1, 147–157. [Google Scholar] [CrossRef]
- Baltsavias, E.P. Airborne laser scanning: Existing systems and firms and other resources. ISPRS J. Photogramm. Remote Sens. 1999, 54, 165–198. [Google Scholar] [CrossRef]
- Su, J.; Bork, E. Influence of vegetation, slope, and LiDAR sampling angle on DEM accuracy. Photogramm. Eng. Remote Sens. 2006, 72, 1265–1274. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, E. Accuracy of airborne LiDAR-derived elevation: Empirical assessment and error budget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Tinkham, W.T.; Huang, H.; Smith, A.M.S.; Shrestha, R.; Falkowski, M.J.; Hudak, A.T.; Link, T.E.; Glenn, N.F.; Marks, D.G. A comparison of two open source LiDAR surface classification algorithms. Remote Sens. 2011, 3, 638–649. [Google Scholar] [CrossRef]
- Tinkham, W.T.; Smith, A.M.S.; Hoffman, C.M.; Hudak, A.T.; Falkowski, M.J.; Swanson, M.E.; Gessler, P.E. Investigating the influence of LiDAR ground surface errors on the utility of derived forest inventories. Can. J. For. Res. 2012, 42, 413–422. [Google Scholar] [CrossRef]
- Maguya, A.S.; Junttila, V.; Kauranne, T. Adaptive algorithm for large scale dtm interpolation from LiDAR data for forestry applications in steep forested terrain. ISPRS J. Photogramm. Remote Sens. 2013, 85, 74–83. [Google Scholar] [CrossRef]
- Su, W.; Sun, Z.; Zhong, R.; Huang, J.; Li, M.; Zhu, J.; Zhang, K.; Wu, H.; Zhu, D. A new hierarchical moving curve-fitting algorithm for filtering LiDAR data for automatic DTM generation. Int. J. Remote Sens. 2015, 36, 3616–3635. [Google Scholar] [CrossRef]
- Hu, X.; Ye, L.; Pang, S.; Shan, J. Semi-global filtering of airborne LiDAR data for fast extraction of digital terrain models. Remote Sens. 2015, 7, 10996–11015. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, X. Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification. ISPRS J. Photogramm. Remote Sens. 2013, 81, 44–59. [Google Scholar] [CrossRef]
- Zhang, W.M.; Qi, J.B.; Wan, P.; Wang, H.T.; Xie, D.H.; Wang, X.Y.; Yan, G.J. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Mallet, C.; Bretar, F. Full-waveform topographic LiDAR: State-of-the-art. ISPRS J. Photogram. Remote Sens. 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Chauve, A.; Mallet, C.E.; Bretar, F.E.E.; Durrieu, S.; Deseilligny, M.P.; Puech, W. Processing full-waveform LiDAR data: Modeling raw signals. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, 102–107. [Google Scholar]
- Wagner, W.; Hollaus, M.; Briese, C.; Ducic, V. 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int. J. Remote Sens. 2008, 29, 1433–1452. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Mills, J.P. Integration of full-waveform information into the airborne laser scanning data filtering process. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 224–229. [Google Scholar]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Lin, Y.-C.; Mills, J.P.; Smith-Voysey, S. Detection of weak and overlapping pulses from waveform airborne laser scanning data. In Proceedings of the SilviLaser, Edinburgh, UK, 17–19 September 2008; pp. 478–487. [Google Scholar]
- Reitberger, J.; Krzystek, P.; Stilla, U. Analysis of full-waveform LiDAR data for the classification of deciduous and coniferous trees. Int. J. Remote Sens. 2008, 29, 1407–1431. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C. Digital terrain modelling for archaeological interpretation within forested areas using full-waveform laser scanning. In Proceedings of the 7th International Symposium on Virtual Reality, Archaeology and Cultural Heritage (VAST), Nicosia, Cyprus, 30 October–4 November 2006. [Google Scholar]
- Goncalves, G.; Pereira, L. Assessment of the performance of eight filtering algorithms by using LiDAR data of unmanaged eucalypt forest. In Proceedings of the Silvilaser 2010: The 10th International Conference on LiDAR Applications for Assessing Forest Ecosystems, Freiburg, Germany, 14–17 September 2010. [Google Scholar]
- Mandlburger, G.; Briese, C.; Pfeifer, N. Progress in LiDAR sensor technology—Chance and challenge for DTM generation and data administration. In Proceedings of the 51th Photogrammetric Week, Stuttgart, Germany, 3–7 September 2007. [Google Scholar]
- Xu, L.; Duan, L.; Li, X. A high success rate full-waveform LiDAR echo decomposition method. Meas. Sci. Technol. 2016, 27, 015205. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, W.; Zhang, L.; Wang, S. Decomposition of small-footprint full waveform LiDAR data based on generalized Gaussian model and grouping LM optimization. Meas. Sci. Technol. 2017, 28, 045203. [Google Scholar] [CrossRef]
- Salas, E.A.L.; Henebry, G.M. Canopy Height Estimation by Characterizing Waveform LiDAR Geometry Based on Shape-Distance Metric. AIMS Geosci. 2016, 2, 366–390. [Google Scholar] [CrossRef]
- Salas, E.A.L.; Amatya, S.; Henebry, G.M. Application of Iterative Noise-adding Procedures for Evaluation of Moment Distance Index for LiDAR Waveforms. AIMS Geosci. 2017, 3, 187–215. [Google Scholar] [CrossRef]
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Pan, Z.; Glennie, C.; Hartzell, P.; Fernandez-Diaz, J.; Legleiter, C.; Overstreet, B. Performance Assessment of High Resolution Airborne Full Waveform LiDAR for Shallow River Bathymetry. Remote Sens. 2015, 7, 5133–5159. [Google Scholar] [CrossRef]
- Gumerov, D. DTM Generation in Forested Areas from Full-Waveform Airborne LiDAR Data. Master’s Thesis, York University, Toronto, ON, Canada, 20 November 2014. [Google Scholar]
- Hofton, M.; Minster, J.; Blair, J. Decomposition of laser altimeter waveforms. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1989–1996. [Google Scholar] [CrossRef]
- Wagner, W.; Ulrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogram. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Jutzi, B.; Stilla, U. Measuring and processing the waveform of laser pulses. In Proceedings of the 7th Optical 3-D Measurement Techniques, FIG/IAG/ISPRS, Vienna, Austria, 3–5 October 2005; pp. 194–203. [Google Scholar]
- Stilla, U.; Jutzi, B. Waveform analysis for small-footprint pulsed laser systems. In Topographic Laser Ranging and Scanning: Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 215–234. [Google Scholar]
- Lin, Y.C.; Mills, J.P.; Smith-Voysey, S. Rigorous pulse detection from full-waveform airborne laser scanning data. Int. J. Remote Sens. 2010, 31, 1303–1324. [Google Scholar] [CrossRef]
- Roncat, A.; Wagner, W.; Melzer, T.; Ullrich, A. Echo detection and localization in full-waveform airborne laser scanner data using the averaged square difference function estimator. Photogramm. J. Finl. 2008, 21, 62–75. [Google Scholar]
- Magruder, L.A.; Neuenschwander, A.L. LiDAR full-waveform data analysis for detection of faint returns through obscurants. In Proceedings of the SPIE 7323; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Bellingham, WA, USA, 2009; Volume 7323. [Google Scholar]
- Soininen, A. Terrascan User’s Guide. Terrasolid: Helsinki, Finland; Available online: http://www.terrasolid.com/download/user_guides.php (accessed on 30 May 2017).
- Wackerly, D.D.; Mendenhall, W., III; Scheaffer, R.L. Mathematical Statistics with Applications, 7th ed.; Cengage Learning, Inc.: Belmont, CA, USA, 2008. [Google Scholar]
- Bartoszynski, R.; Niewiadomska-Bugaj, M. Probability and Statistical Inference, 2nd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sites | Progressive TIN | Developed Algorithm |
|---|---|---|
| Open Area | 1.6 | 2.5 |
| Maple | 1.3 | 2.5 |
| Mixed Woods | 1.8 | 2.3 |
| Jack Pine | 2.1 | 2.9 |
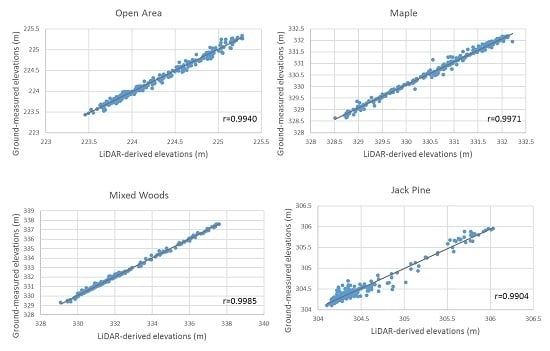
| Correlation Coefficient | Sample Size | z-Value | Acceptance | ||
|---|---|---|---|---|---|
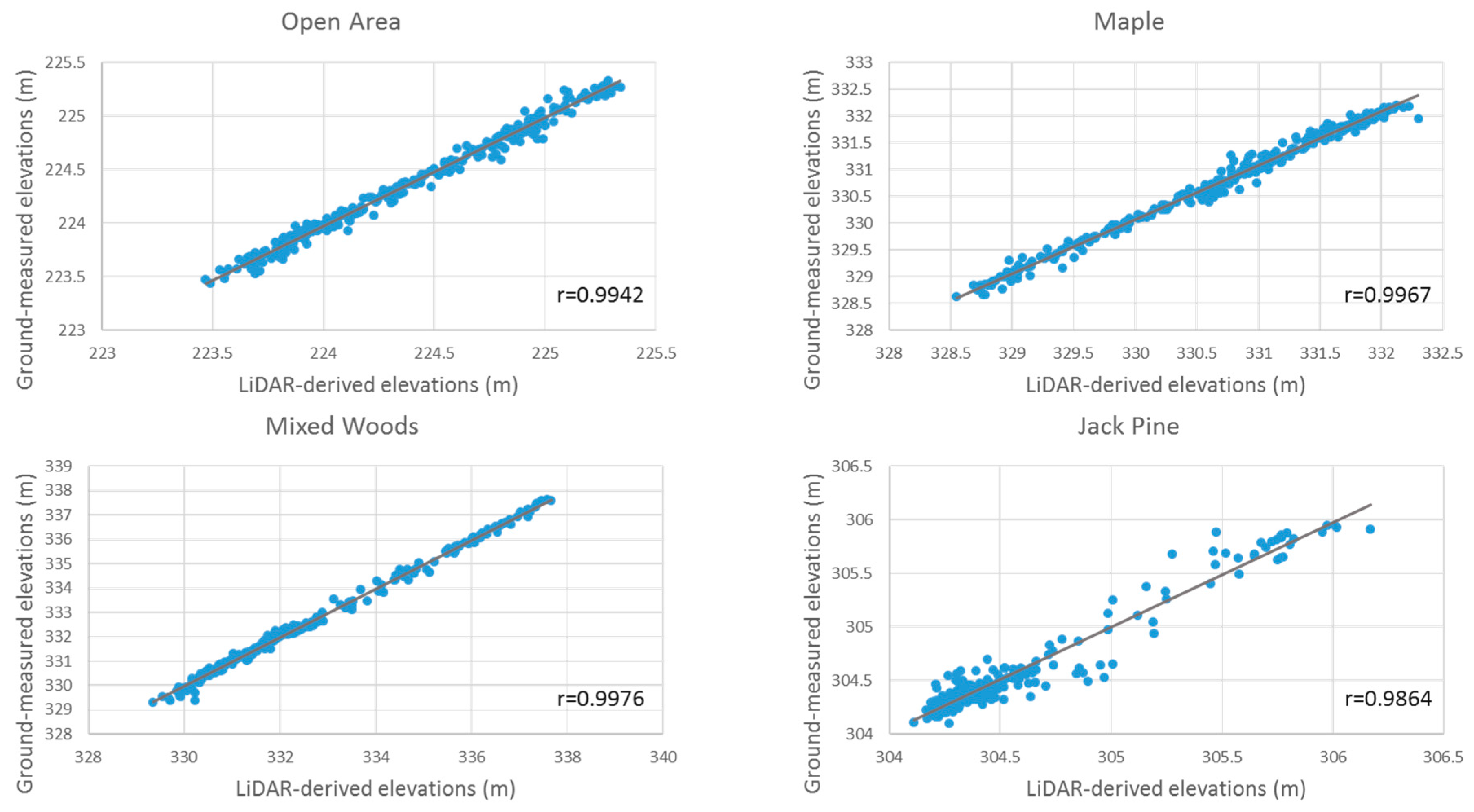
| Open Area | 0.9942 | 0.9940 | 301 | −0.21 | |
| Maple | 0.9967 | 0.9971 | 398 | 0.47 | |
| Mixed Woods | 0.9976 | 0.9985 | 249 | 2.67 | |
| Jack Pine | 0.9864 | 0.9904 | 327 | 2.04 | |
| Methods | Differences (m) | Sites | |||
|---|---|---|---|---|---|
| Open Area | Maple | Mixed Woods | Jack Pine | ||
| Progressive TIN | Minimum | −0.159 | −0.494 | −0.453 | −0.413 |
| Maximum | 0.210 | 0.357 | 0.825 | 0.433 | |
| Mean | 0.023 | −0.072 | 0.022 | −0.008 | |
| Standard deviation | 0.055 | 0.092 | 0.145 | 0.098 | |
| RMSE, | 0.059 | 0.117 | 0.147 | 0.098 | |
| Developed method | Minimum | −0.210 | −0.0606 | −0.440 | −0.347 |
| Maximum | 0.165 | 0.285 | 0.237 | 0.370 | |
| Mean | 0.011 | −0.077 | −0.051 | −0.017 | |
| Standard deviation | 0.057 | 0.089 | 0.114 | 0.084 | |
| RMSE, | 0.058 | 0.118 | 0.125 | 0.086 | |
| F-test | 1.06 | 1.01 | 1.38 | 1.33 | |
| Acceptance | |||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, B.; Gumerov, D.; Wang, J.; Zhang, A.W. An Integrated Approach to Generating Accurate DTM from Airborne Full-Waveform LiDAR Data. Remote Sens. 2017, 9, 871. https://doi.org/10.3390/rs9080871
Hu B, Gumerov D, Wang J, Zhang AW. An Integrated Approach to Generating Accurate DTM from Airborne Full-Waveform LiDAR Data. Remote Sensing. 2017; 9(8):871. https://doi.org/10.3390/rs9080871
Chicago/Turabian StyleHu, Baoxin, Damir Gumerov, Jianguo Wang, and And Wen Zhang. 2017. "An Integrated Approach to Generating Accurate DTM from Airborne Full-Waveform LiDAR Data" Remote Sensing 9, no. 8: 871. https://doi.org/10.3390/rs9080871
APA StyleHu, B., Gumerov, D., Wang, J., & Zhang, A. W. (2017). An Integrated Approach to Generating Accurate DTM from Airborne Full-Waveform LiDAR Data. Remote Sensing, 9(8), 871. https://doi.org/10.3390/rs9080871