Hydrophobicity Influence on Swimming Performance of Magnetically Driven Miniature Helical Swimmers

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory
2.1. Magnetic Actuation
2.2. Form Drag: Resistive Force Theory
2.3. Skin Friction Drag
2.4. Dynamics of Helical Microswimmers and Step-Out Frequency
3. System Overview
3.1. Magnetic Actuation System
3.2. Helical Swimmers with Different Hydrophobicity at Low Reynolds Numbers
4. Experiments and Results
4.1. Measuring Swimming Velocity
4.2. Impact of Hydrophobicity on Step-Out Frequency
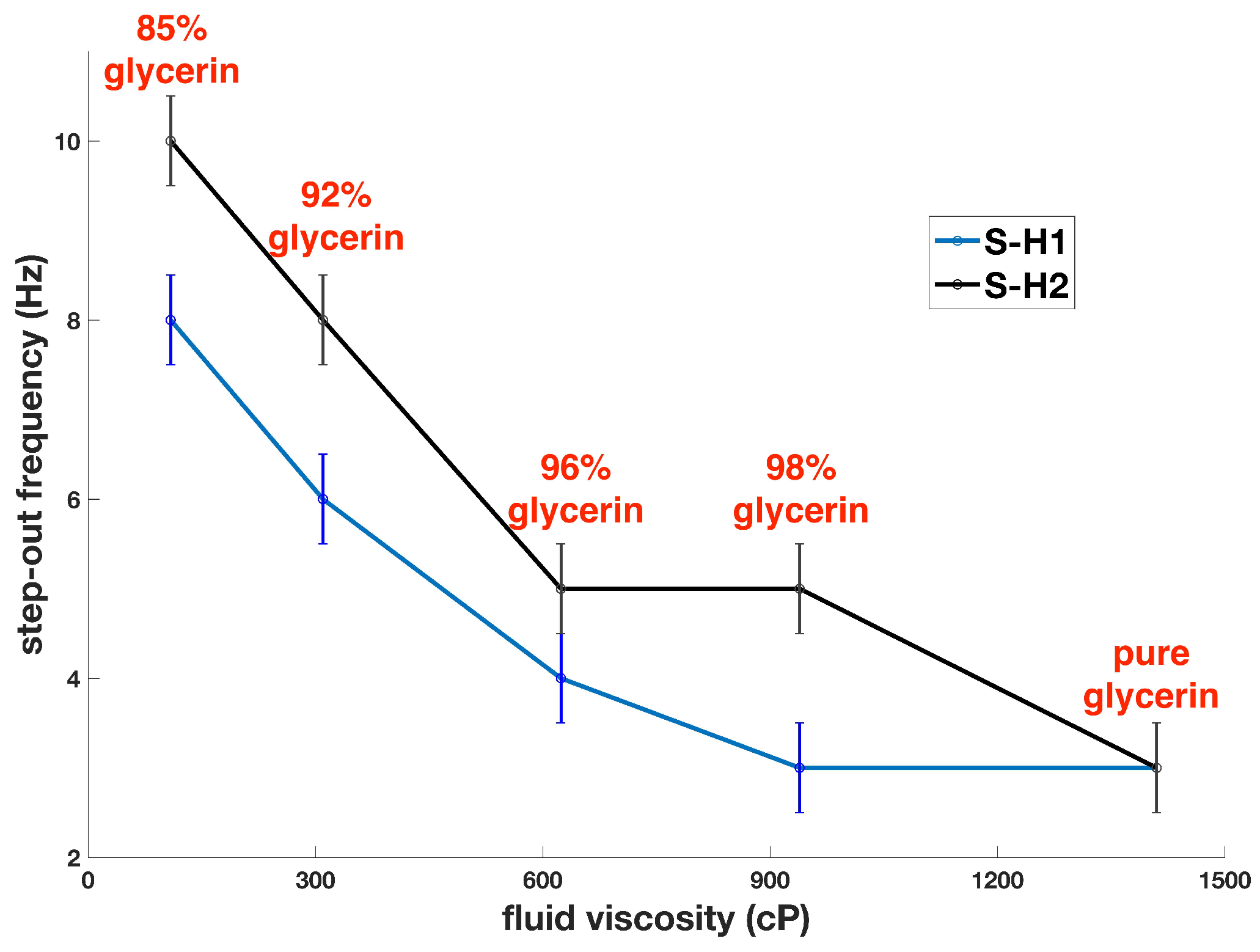
4.3. Impact of Fluid Viscosity on Step-Out Frequency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, L.; Abbott, J.; Dong, L.; Kratochvil, B.; Bell, D.; Nelson, B. Artificial bacterial flagella: Fabrication and magnetic control. Appl. Phys. Lett. 2009, 94, 064107. [Google Scholar] [CrossRef]
- Li, L.; Wang, J.; Li, T.; Song, W.; Zhang, G. Hydrodynamics and propulsion mechanism of self-propelled catalytic micromotors: model and experiment. Soft Matter. 2014, 10, 7511–7518. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.; Xu, J.; Xu, T.; Tang, T.; Bian, L.; Wang, Y.; et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2. [Google Scholar] [CrossRef]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-Printed Biodegradable Microswimmer for Drug Delivery and Targeted Cell Labeling. bioRxiv 2018. [Google Scholar]
- Xu, T.; Hwang, G.; Andreff, N.; Regnier, S. Planar Path Following of 3-D Steering Scaled-Up Helical Microswimmers. Robot. IEEE Trans. 2015, 31, 117–127. [Google Scholar] [CrossRef] [Green Version]
- Oulmas, A.; Andreff, N.; Régnier, S. Closed-loop 3D path following of scaled-up helical microswimmers. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1725–1730. [Google Scholar]
- Guan, Y.; Xu, T.; Liu, J.; Wu, X. Image-based visual servoing of helical microswimmers for arbitrary planar path following at low reynolds numbers. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1883–1888. [Google Scholar]
- Lu, H.; Shang, W.; Hui, X.; Shen, Y. Ultrahigh-Precision Rotational Positioning Under a Microscope: Nanorobotic System, Modeling, Control, and Applications. IEEE Trans. Robot. 2018, PP, 1–11. [Google Scholar] [CrossRef]
- Venugopalan, P.L.; Sai, R.; Chandorkar, Y.; Basu, B.; Shivashankar, S.; Ghosh, A. Conformal cytocompatible ferrite coatings facilitate the realization of a nanovoyager in human blood. Nano Lett. 2014, 14, 1968. [Google Scholar] [CrossRef] [PubMed]
- Peters, C.; Hoop, M.; Pané, S.; Nelson, B.J.; Hierold, C. Degradable Magnetic Composites for Minimally Invasive Interventions: Device Fabrication, Targeted Drug Delivery, and Cytotoxicity Tests. Adv. Mater. 2015, 28, 533–538. [Google Scholar] [CrossRef] [PubMed]
- Qiu, F.; Fujita, S.; Mhanna, R.; Zhang, L.; Simona, B.R.; Nelson, B.J. Magnetic Helical Microswimmers Functionalized with Lipoplexes for Targeted Gene Delivery. Adv. Funct. Mater. 2014, 25, 1666–1671. [Google Scholar] [CrossRef]
- Wu, Z.; Troll, J.; Jeong, H.H.; Wei, Q.; Fischer, P. A swarm of slippery micropropellers penetrates the vitreous body of the eye. Sci. Adv. 2018, 4, eaat4388. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Angsantikul, P.; Liu, W.; Esteban-Fernández de Ávila, B.; Chang, X.; Sandraz, E.; Liang, Y.; Zhu, S.; Zhang, Y.; Chen, C. Biomimetic Platelet-Camouflaged Nanorobots for Binding and Isolation of Biological Threats. Adv. Mater. 2018, 30. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Lu, M.; Nourhani, A.; Lammert, P.E.; Stratton, Z.; Muddana, H.S.; Crespi, V.H.; Huang, T.J. Selectively manipulable acoustic-powered microswimmers. Sci. Rep. 2015, 5, 9744. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mushtaq, F.; Asani, A.; Hoop, M.; Chen, X.Z.; Ahmed, D.; Nelson, B.J.; Pané, S. Highly Efficient Coaxial TiO2-PtPd Tubular Nanomachines for Photocatalytic Water Purification with Multiple Locomotion Strategies. Adv. Funct. Mater. 2016, 26, 6995–7002. [Google Scholar] [CrossRef]
- Huang, T.Y.; Qiu, F.; Tung, H.W.; Peyer, K.E.; Shamsudhin, N.; Pokki, J.; Zhang, L.; Chen, X.B.; Nelson, B.J.; Sakar, M.S. Cooperative manipulation and transport of microobjects using multiple helical microcarriers. RSC Adv. 2014, 4, 26771–26776. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. Recent developments in magnetically driven micro- and nanorobots. Appl. Mater. Today 2017, 9, 37–48. [Google Scholar] [CrossRef]
- Purcell, E.M. Life at low Reynolds number. Am. J. Phys. 1977, 45, 3–11. [Google Scholar] [CrossRef]
- Xu, T.; Hwang, G.; Andreff, N.; Regnier, S. Modeling and Swimming Property Characterizations of Scaled-Up Helical Microswimmers. Mechatron. IEEEASME Trans. 2014, 19, 1069–1079. [Google Scholar] [CrossRef]
- Xu, T.; Hwang, G.; Andreff, N.; Régnier, S. Influence of geometry on swimming performance of helical swimmers using DoE. J. Micro Bio Robot. 2016, 11, 57–66. [Google Scholar] [CrossRef]
- Abbott, J.J.; Peyer, K.E.; Lagomarsino, M.C.; Zhang, L.; Dong, L.; Kaliakatsos, I.K.; Nelson, B.J. How Should Microrobots Swim? Int. J. Robot. Res. 2009, 28, 1434–1447. [Google Scholar] [CrossRef]
- Dean, B.; Bhushan, B. Shark-skin surfaces for fluid-drag reduction in turbulent flow: A review. Philosophical Trans. Royal Soc. London A Math. Phys. Eng. Sci. 2010, 368, 4775–4806. [Google Scholar] [CrossRef] [PubMed]
- Gray, J.; Hancock, G.J. The Propulsion of Sea-Urchin Spermatozoa. J. Experiment. Biol. 1955, 32, 802–814. [Google Scholar]
- Rodenborn, B.; Chen, C.H.; Swinney, H.L.; Liu, B.; Zhang, H.P. Propulsion of microorganisms by a helical flagellum. Proc. Natl. Acad. Sci. USA 2013, 110, E338–E347. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- White, F. Fluid Mechanics, McGraw-Hill Series in Mechanical Engineering; McGraw Hill: New York, NY, USA, 2011. [Google Scholar]
- Bird, R.; Stewart, W.; Lightfoot, E. Transport Phenomena; Wiley International edition; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar]
- Cheng, M.; Song, M.; Dong, H.; Shi, F. Surface Adhesive Forces: A Metric Describing the Drag-Reducing Effects of Superhydrophobic Coatings. Small 2015, 11, 1665–1671. [Google Scholar] [CrossRef] [PubMed]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, C.; Liu, J.; Wu, X.; Wang, B.; Zhang, L.; Zheng, Y.; Xu, T. Hydrophobicity Influence on Swimming Performance of Magnetically Driven Miniature Helical Swimmers. Micromachines 2019, 10, 175. https://doi.org/10.3390/mi10030175
Ye C, Liu J, Wu X, Wang B, Zhang L, Zheng Y, Xu T. Hydrophobicity Influence on Swimming Performance of Magnetically Driven Miniature Helical Swimmers. Micromachines. 2019; 10(3):175. https://doi.org/10.3390/mi10030175
Chicago/Turabian StyleYe, Chengwei, Jia Liu, Xinyu Wu, Ben Wang, Li Zhang, Yuanyi Zheng, and Tiantian Xu. 2019. "Hydrophobicity Influence on Swimming Performance of Magnetically Driven Miniature Helical Swimmers" Micromachines 10, no. 3: 175. https://doi.org/10.3390/mi10030175
APA StyleYe, C., Liu, J., Wu, X., Wang, B., Zhang, L., Zheng, Y., & Xu, T. (2019). Hydrophobicity Influence on Swimming Performance of Magnetically Driven Miniature Helical Swimmers. Micromachines, 10(3), 175. https://doi.org/10.3390/mi10030175