Fiber Optofluidic Technology Based on Optical Force and Photothermal Effects

Abstract
:1. Introduction
2. FOF Technology Based on Optical Force
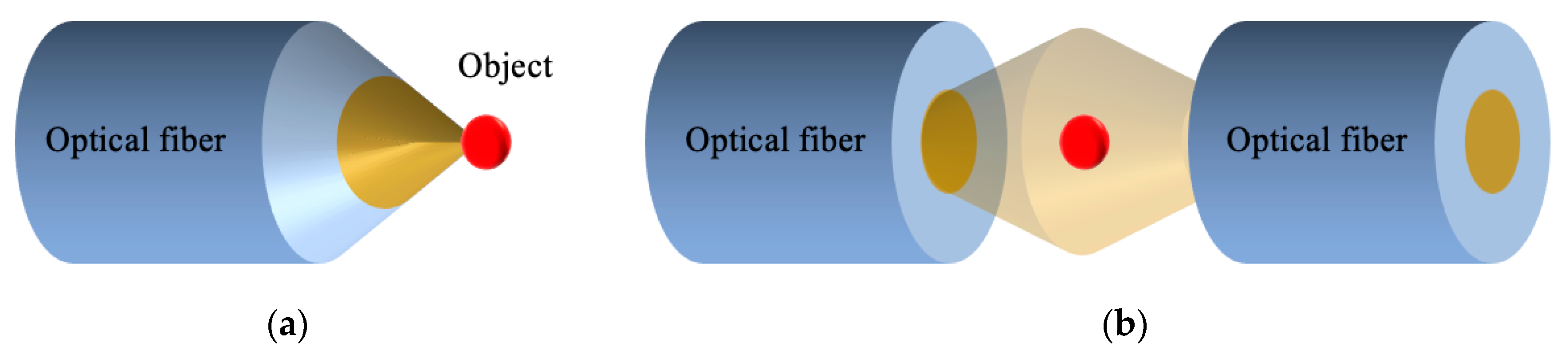
2.1. Stable Single Optical Trap with Optical Force
2.1.1. SSOT Based on Single Optical Force
2.1.2. SSOT Based on Dual-Optical Force
2.2. Stable Combined Optical Trap with Optical Force and Microfluidic Flow Force
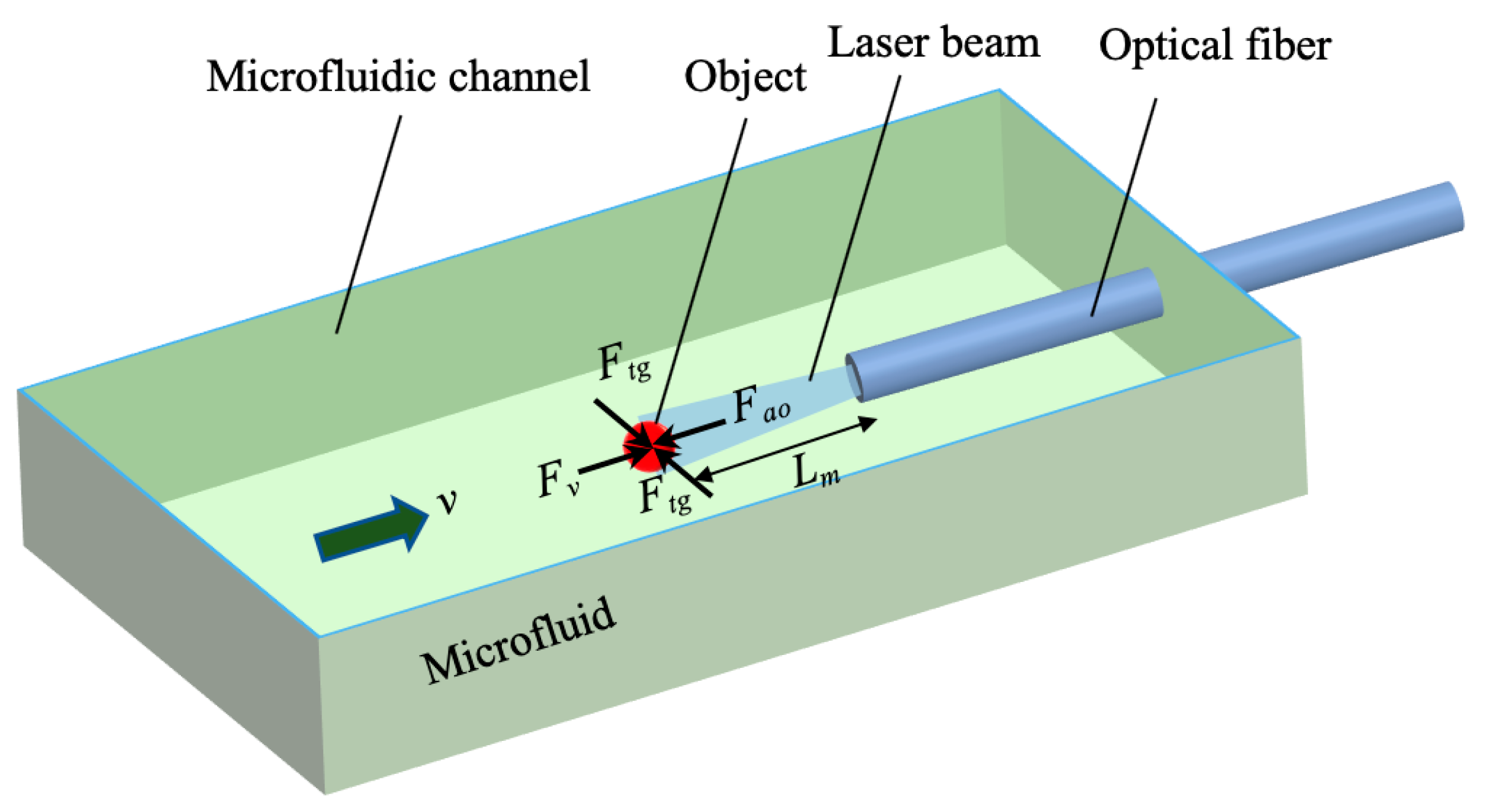
2.2.1. SCOT Based on Optical Scattering Force
2.2.2. SCOT Based on Optical Gradient Force
3. FOF Technology Based on a Photothermal Effect
3.1. FOF Technology Based on Photothermal Effect with Microfibers
3.2. FOF Technology Based on a Photothermal Effect with Special Materials
3.2.1. Materials Integrated with Optical Fiber (MIFs)
3.2.2. Materials Integrated with Microfluids
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Schmidt, H.; Hawkins, A.R. The photonic integration of non-solid media using optofluidics. Nat. Photonics 2011, 5, 598–604. [Google Scholar] [CrossRef]
- Fan, X.; White, I.M. Optofluidic microsystems for chemical and biological analysis. Nat. Photonics 2011, 5, 591–597. [Google Scholar] [CrossRef] [PubMed]
- Sudirman, A.; Margulis, W. All-Fiber optofluidic component to combine light and fluid. IEEE Photonics Technol. Lett. 2014, 26, 1031–1033. [Google Scholar] [CrossRef]
- Erickson, D.; Sinton, D.; Psaltis, D. Optofluidics for energy applications. Nat. Photonics 2011, 5, 583–590. [Google Scholar] [CrossRef]
- Cubillas, A.M.; Unterkofler, S.T.; Euser, G.; Etzold, B.J.; Jones, A.C.; Sadler, P.J.; Wasserscheid, P.; Russell, P.S.J. Photonic crystal fibres for chemical sensing and photochemistry. Chem. Soc. Rev. 2013, 42, 8629–8648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, T.; Wu, D.; Liu, M.; Duan, D.W. In-line fiber optic interferometric sensors in single-mode fibers. Sensors 2012, 12, 10430–10449. [Google Scholar] [CrossRef]
- Zhang, Q.; Hao, P.; Tian, X. High-visibility in-line fiber-optic optofluidic Fabry–Pérot cavity. Appl. Phys. Lett. 2017, 111, 191102. [Google Scholar] [CrossRef]
- Liu, S.; Ji, Y.; Yang, J. Nafion film temperature/humidity sensing based on optical fiber Fabry-Perot interference. Sens. Actuators A 2018, 313–321. [Google Scholar] [CrossRef]
- Chen, L.H.; Chan, C.C.; Ni, K.; Hu, P.B.; Li, T.; Wong, W.C.; Poh, C.L. Label-free fiber-optic interferometric immunosensors based on waist-enlarged fusion taper. Sens. Actuators B 2013, 178, 176–184. [Google Scholar] [CrossRef]
- Shao, M.; Qiao, X.; Fu, H. A Mach–Zehnder interferometric humidity sensor based on waist-enlarged tapers. Opt. Laser Eng. 2014, 86–90. [Google Scholar] [CrossRef]
- Hu, P.; Dong, X.; Ni, K. Sensitivity-enhanced Michelson interferometric humidity sensor with waist-enlarged fiber bitaper. Sens. Actuators B 2014, 194, 180–184. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, W.; Geng, P.; Gao, S. Fiber Mach-Zehnder interferometer based on concatenated down-and up-tapers for refractive index sensing applications. Opt. Commun. 2013, 288, 47–51. [Google Scholar] [CrossRef]
- Tian, Z.; Yam, S.S.; Loock, H.P. Single-mode fiber refractive index sensor based on core-offset attenuators. IEEE Photonics Technol. Lett. 2008, 20, 1387–1389. [Google Scholar] [CrossRef]
- Jiang, L.; Yang, J.; Wang, S.; Li, B.; Wang, M. Fiber Mach-Zehnder interferometer based on micro cavities for high-temperature sensing with high sensitivity. Opt. Lett. 2011, 36, 3753–3755. [Google Scholar] [CrossRef] [PubMed]
- Fu, H.Y.; Tam, H.Y.; Shao, L.Y.; Dong, X.; Wai, P.K.A.; Lu, C.; Khijwania, S.K. Pressure sensor realized with polarization-maintaining photonic crystal fiber-based Sagnac interferometer. Appl. Opt. 2008, 47, 2835–2839. [Google Scholar] [CrossRef] [PubMed]
- Moon, D.S.; Kim, B.H.; Lin, A.; Sun, G.; Han, T.G.; Han, W.T.; Chung, Y. The temperature sensitivity of Sagnac loop interferometer based on polarization maintaining side-hole fiber. Opt. Express 2007, 15, 7962–7967. [Google Scholar] [CrossRef] [PubMed]
- Bertucci, A.; Manicardi, A.; Candiani, A.; Giannetti, S.; Cucinotta, A.; Spoto, G.; Konstantaki, M.; Pissadakis, S.; Selleri, S.; Corradini, R. Detection of unamplified genomic DNA by a PNA-based microstructured optical fiber (MOF) Bragg-grating optofluidic system. Biosens. Bioelectron. 2015, 63, 248–254. [Google Scholar] [CrossRef]
- Zhang, N.; Humbert, G.; Wu, Z.; Li, K.; Shum, P.P.; Zhang, N.M.Y.; Wei, L. In-line optofluidic refractive index sensing in a side-channel photonic crystal fiber. Opt. Express 2016, 24, 27674–27682. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Li, K.; Cui, Y. Ultra-sensitive chemical and biological analysis via specialty fibers with built-in microstructured optofluidic channels. Lab. Chip. 2018, 18, 655–661. [Google Scholar] [CrossRef]
- Rifat, A.A.; Ahmed, R.; Yetisen, A.K. Photonic crystal fiber based plasmonic sensors. Sens. Actuators B 2017, 311–325. [Google Scholar] [CrossRef]
- Xing, Z.; Zheng, Y.; Yan, Z. High-sensitivity humidity sensing of microfiber coated with three-dimensional graphene network. Sens. Actuators B 2019, 953–959. [Google Scholar] [CrossRef]
- Vaiano, P.; Carotenuto, B.; Pisco, M.; Ricciardi, A.; Quero, G.; Consales, M.; Cusano, A. Lab on Fiber Technology for biological sensing applications. Laser Photonics Rev. 2016, 10, 922–961. [Google Scholar] [CrossRef]
- Ashkin, A. Acceleration and trapping of particles by radiation pressure. Phys. Rev. Lett. 1970, 24, 156. [Google Scholar] [CrossRef]
- Ashkin, A.; Dziedzic, J.M.; Bjorkholm, J.; Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 1986, 11, 288–290. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guck, J.; Ananthakrishnan, R.; Moon, T.; Cunningham, C.; Käs, J. Optical deformability of soft biological dielectrics. Phys. Rev. Lett. 2000, 84, 5451. [Google Scholar] [CrossRef] [PubMed]
- Jess, P.; Garcés-Chávez, V.; Smith, D.; Mazilu, M.; Paterson, L.; Riches, A.; Herrington, C.; Sibbett, W.; Dholakia, K. Dual beam fibre trap for Raman microspectroscopy of single cells. Opt. Express 2006, 14, 5779–5791. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Cheng, C.; Xin, H.; Lei, H.; Li, B. Controllable orientation of single silver nanowire using two fiber probes. Sci. Rep. 2015, 4, 3989. [Google Scholar] [CrossRef]
- Taguchi, K.; Atsuta, K.; Nakata, T.; Ikeda, R. Levitation of a microscopic object using plural optical fibers. Opt. Commun. 2000, 176, 43–47. [Google Scholar] [CrossRef]
- Gong, Y.; Huang, W.; Liu, Q.F.; Wu, Y.; Rao, Y.; Peng, G.D.; Lang, J.; Zhang, K. Graded-index optical fiber tweezers with long manipulation length. Opt. Express 2014, 22, 25267–25276. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, P.; Liu, Z.; Lei, J.; Yang, J.; Yuan, L. A novel temperature sensor based on optical trapping technology. J. Lightwave Technol. 2014, 32, 1394–1398. [Google Scholar] [CrossRef]
- Xiao, G.; Yang, K.; Luo, H.; Chen, X.; Xiong, W. Orbital rotation of trapped particle in a transversely misaligned dual-fiber optical trap. IEEE Photonics J. 2016, 8, 1–8. [Google Scholar] [CrossRef]
- Bykov, D.S.; Schmidt, O.A.; Euser, T.G.; Russell, P.S.J. Flying particle sensors in hollow-core photonic crystal fibre. Nat. Photonics 2015, 9, 461. [Google Scholar] [CrossRef]
- Bell, A.G. On the production and reproduction of sound by light. Am. J. Sci. 1880, 305–324. [Google Scholar] [CrossRef]
- Terazima, M.; Hirota, N.; Braslavsky, S.E.; Mandelis, A.; Bialkowski, S.E.; Diebold, G.J.; Miller, R.; Fournier, D.; Palmer, R.A.; Tam, A. Quantities, terminology, and symbols in photothermal and related spectroscopies (IUPAC Recommendations 2004). Pure Appl. Chem. 2004, 76, 1083–1118. [Google Scholar] [CrossRef]
- Ashkin, A. Forces of a single-beam gradient laser trap on a dielectric sphere in the ray optics regime. Biophys. J. 1992, 61, 569–582. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Guo, C.; Yang, J.; Yuan, L. Tapered fiber optical tweezers for microscopic particle trapping: Fabrication and application. Opt. Express 2006, 14, 12510–12516. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Wang, L.; Liang, P.; Yuan, L. Mode division multiplexing technology for single-fiber optical trapping axial-position adjustment. Opt. Lett. 2013, 38, 2617–2620. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, P.; Lei, J. Multi-dimensional manipulation of yeast cells using a LP11 mode beam. J. Lightwave Technol. 2014, 32, 1098–1103. [Google Scholar] [CrossRef]
- Liu, Z.; Liang, P.; Zhang, Y.; Zhang, Y.; Zhao, E.; Yang, J.; Yuan, L. Micro particle launcher/cleaner based on optical trapping technology. Opt. Express 2015, 23, 8650–8658. [Google Scholar] [CrossRef]
- Cheng, C.; Xu, X.; Lei, H.; Li, B. Plasmon-assisted trapping of nanoparticles using a silver-nanowire-embedded PMMA nanofiber. Sci. Rep. 2016, 6, 20433. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Xin, H.; Xu, X.; Liu, X.; Li, B. Fibre-optic trapping and manipulation at the nanoscale. Adv. Mater. Lett. 2018, 9, 567–577. [Google Scholar] [CrossRef]
- Lei, H.; Xu, C.; Zhang, Y.; Li, B. Bidirectional optical transportation and controllable positioning of nanoparticles using an optical nanofiber. Nanoscale 2012, 4, 6707–6709. [Google Scholar] [CrossRef] [PubMed]
- Brambilla, G.; Murugan, G.; Wilkinson, J.; Richardson, D. Optical manipulation of microspheres along a subwavelength optical wire. Opt. Lett. 2007, 32, 3041–3043. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Li, Y.; Li, B. Size-dependent trapping and delivery of submicro-spheres using a submicrofibre. New J. Phys. 2012, 14, 033020. [Google Scholar] [CrossRef]
- Zhang, Y.; Lei, H.; Li, B. Refractive-Index-Based Sorting of Colloidal Particles Using a Subwavelength Optical Fiber in a Static Fluid. Appl. Phys. Express 2013, 6, 072001. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, B. Particle sorting using a subwavelength optical fiber. Laser Photonics Rev. 2013, 7, 289–296. [Google Scholar] [CrossRef]
- Harada, Y.; Asakura, T. Radiation forces on a dielectric sphere in the Rayleigh scattering regime. Opt. Commun. 1996, 124, 529–541. [Google Scholar] [CrossRef]
- Ribeiro, R.S.R.; Soppera, O.; Oliva, A.G.; Guerreiro, A.; Jorge, P.A.S. New trends on optical fiber tweezers. J. Lightwave Technol. 2015, 33, 3394–3405. [Google Scholar] [CrossRef]
- Gong, Y.; Ye, A.Y.; Wu, Y.; Rao, Y.J.; Yao, Y.; Xiao, S. Graded-index fiber tip optical tweezers: Numerical simulation and trapping experiment. Opt. Express 2013, 21, 16181–16190. [Google Scholar] [CrossRef]
- Nylk, J.; Kristensen, M.V.G.; Mazilu, M.; Thayil, A.K.; Mitchell, C.A.; Campbell, E.C.; Dholakia, K. Development of a graded index microlens based fiber optical trap and its characterization using principal component analysis. Biomed. Opt. Express 2015, 6, 1512–1519. [Google Scholar] [CrossRef] [Green Version]
- Gordon, R.; Kawano, M.; Blakely, J.T.; Sinton, D. Optohydro dynamic theory of particles in a dual-beam optical trap. Phys. Rev. B 2008, 77. [Google Scholar]
- Liu, Y.; Yu, M. Investigation of inclined dual-fiber optical tweezers for 3D manipulation and force sensing. Opt. Express 2009, 17, 13624–13638. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, J.; Liu, X.; Zhang, Y.; Li, B. Optical trapping and orientation of Escherichia coli cells using two tapered fiber probes. Photonics Res. 2015, 3, 308–312. [Google Scholar] [CrossRef]
- Liu, X.; Huang, J.; Zhang, Y.; Li, B. Optical regulation of cell chain. Sci. Rep. 2015, 5, 11578. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Liu, Z.; Yang, J. A non-contact single optical fiber multi-optical tweezers probe: Design and fabrication. Opt. Commun. 2012, 285, 4068–4071. [Google Scholar] [CrossRef]
- Zhao, H.; Farrell, G.; Wang, P. Investigation of particle harmonic oscillation using four-core fiber integrated twin-tweezers. IEEE Photonics Technol. Lett. 2016, 28, 461–464. [Google Scholar] [CrossRef]
- Deng, H.; Zhang, Y.; Yuan, T. Fiber-based optical gun for particle shooting. ACS Photonics 2017, 4, 642–648. [Google Scholar] [CrossRef]
- Liberale, C.; Minzioni, P.; Bragheri, F.; Angelis, F.D.; Fabrizio, E.D.; Cristiani, I. Miniaturized all-fibre probe for three-dimensional optical trapping and manipulation. Nat. Photonics 2007, 1, 723–727. [Google Scholar] [CrossRef]
- Unterkofler, S.; Garbos, M.K.; Euser, T.G.; Russell, P.S.J. Long-distance laser propulsion and deformation-monitoring of cells in optofluidic photonic crystal fiber. J. Biophotonics 2013, 6, 743–752. [Google Scholar] [CrossRef] [PubMed]
- Gong, Y.; Zhang, C.; Liu, Q.F.; Wu, Y.; Wu, H.; Rao, Y.; Peng, G.D. Optofluidic tunable manipulation of microparticles by integrating graded-index fiber taper with a microcavity. Opt. Express 2015, 23, 3762–3769. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.L.; Gong, Y.; Liu, Q.F.; Wu, Y.; Rao, Y.J.; Peng, G.D. Graded-index fiber enabled strain-controllable optofluidic manipulation. IEEE Photonics Technol. Lett. 2016, 28, 256–259. [Google Scholar] [CrossRef]
- Gong, Y.; Liu, Q.F.; Zhang, C.L.; Wu, Y.; Rao, Y.J.; Peng, G.D. Microfluidic flow rate detection with a large dynamic range by optical manipulation. IEEE Photonics Technol. Lett. 2015, 27, 2508–2511. [Google Scholar] [CrossRef]
- Gong, Y.; Qiu, L.; Zhang, C.; Wu, Y.; Rao, Y.J.; Peng, G.D. Dual-Mode fiber optofluidic flowmeter with a large dynamic range. J. Lightwave Technol. 2017, 35, 2156–2160. [Google Scholar] [CrossRef]
- Xin, H.; Zhang, Y.; Lei, H.; Li, Y.; Zhang, H.; Li, B. Optofluidic realization and retaining of cell–cell contact using an abrupt tapered optical fibre. Sci. Rep. 2013, 3, 1993. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Huang, J.; Li, Y.; Zhang, Y.; Li, B. Optofluidic organization and transport of cell chain. J. Biophotonics 2017, 10, 1627–1635. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Li, Y.; Zhang, Y.; Hu, C.; Liu, Z.; Yang, X.; Yuan, L. HACF-based optical tweezers available for living cells manipulating and sterile transporting. Opt. Commun. 2018, 427, 563–566. [Google Scholar] [CrossRef]
- Xin, H.; Li, B. Fiber-based optical trapping and manipulation. Front. Optoelectron. 2019, 12, 97–110. [Google Scholar] [CrossRef]
- Xu, C.; Lei, H.; Zhang, Y.; Li, B. Backward transport of nanoparticles in fluidic flow. Opt. Express 2012, 20, 1930–1938. [Google Scholar] [CrossRef]
- Lei, H.; Zhang, Y.; Li, B. Particle separation in fluidic flow by optical fiber. Opt. Express 2012, 20, 1292–1300. [Google Scholar] [CrossRef]
- Gloge, D. Weakly guiding fibers. Appl. Opt. 1971, 10, 2252–8225. [Google Scholar] [CrossRef]
- Li, K.; Liu, G.; Wu, Y.; Hao, P.; Zhou, W.; Zhang, Z. Gold nanoparticle amplified optical microfiber evanescent wave absorption biosensor for cancer biomarker detection in serum. Talanta 2014, 120, 419. [Google Scholar] [CrossRef] [PubMed]
- Sun, D.; Guo, T.; Ran, Y.; Huang, Y.; Guan, B. In situ DNA hybridization detection with a reflective microfiber grating biosensor. Biosens. Bioelectron. 2014, 61, 541. [Google Scholar] [CrossRef] [PubMed]
- Soong, C.; Li, W.; Liu, C.; Tzeng, P. Theoretical analysis for photophoresis of a microscale hydrophobic particle in liquids. Opt. Express 2010, 18, 2168–2182. [Google Scholar] [CrossRef] [PubMed]
- Duhr, S.; Braun, D. Optothermal molecule trapping by opposing fluid flow with thermophoretic drift. Phys. Rev. Lett. 2006, 97, 038103. [Google Scholar] [CrossRef] [PubMed]
- Xin, H.; Li, X.; Li, B. Massive photothermal trapping and migration of particles by a tapered optical fiber. Opt. Express 2011, 19, 17065–17074. [Google Scholar] [CrossRef] [PubMed]
- Lei, H.; Zhang, Y.; Li, X.; Li, B. Photophoretic assembly and migration of dielectric particles and Escherichia coli in liquids using a subwavelength diameter optical fiber. Lab. Chip 2011, 11, 2241–2246. [Google Scholar] [CrossRef] [PubMed]
- Xin, H.; Lei, H.; Zhang, Y.; Li, X.; Li, B. Photothermal trapping of dielectric particles by optical fiber-ring. Opt. Express 2011, 19, 2711–2719. [Google Scholar] [CrossRef] [PubMed]
- Cadarso, V.J.; Llobera, A.; Puyol, M. Integrated photonic nanofences: Combining subwavelength waveguides with an enhanced evanescent field for sensing applications. ACS Nano 2015, 10, 778–785. [Google Scholar] [CrossRef] [PubMed]
- Gong, Y.; Zhang, M.; Gong, C. Sensitive optofluidic flow rate sensor based on laser heating and microring resonator. Microfluid. Nanofluid. 2015, 19, 1497–1505. [Google Scholar] [CrossRef]
- Liu, Z.; Lei, J.; Zhang, Y. A Method to Gather/Arrange Particles Based on Thermal Convection. In Proceedings of the 24th International Conference on Optical Fibre Sensors, Curitiba, Brazil, 28 September 2015; SPIE: Bellingham, WA, USA, 2015. [Google Scholar]
- Li, Z.; Yang, J.; Liu, S.; Jiang, X.; Wang, H.; Hu, X.; Xing, X. High throughput trapping and arrangement of biological cells using self-assembled optical tweezer. Opt. Express 2018, 26, 34665–34674. [Google Scholar] [CrossRef]
- Yang, J.; Li, Z.; Wang, H.; Zhu, D.; Cai, X.; Cheng, Y.; Xing, X. Optofluidic trapping and delivery of massive mesoscopic matters using mobile vortex array. Appl. Phys. Lett. 2017, 111, 191901. [Google Scholar] [CrossRef]
- Zhang, C.L.; Gong, Y.; Zou, W.L.; Wu, Y.; Rao, Y.J.; Peng, G.D.; Fan, X. Microbubble-Based Fiber Optofluidic Interferometer for Sensing. J. Lightwave Technol. 2017, 35, 2514–2519. [Google Scholar] [CrossRef]
- Zhang, C.L.; Gong, Y.; Wu, Y.; Rao, Y.; Peng, G.; Fan, X. Lab-on-tip based on photothermal microbubble generation for concentration detection. Sens. Actuators B 2018, 2504–2509. [Google Scholar] [CrossRef]
- Matjasec, Z.; Donlagic, D. All-optical, all-fiber, thermal conductivity sensor for identification and characterization of fluids. Sens. Actuators B 2017, 242, 577–585. [Google Scholar] [CrossRef]
- Zhang, K.; Jian, A.; Zhang, X.; Wang, Y.; Li, Z.; Tam, H.Y. Laser-induced thermal bubbles for microfluidic applications. Lab. Chip 2011, 11, 1389–1395. [Google Scholar] [CrossRef]
- Tovar, A.R.; Patel, M.V.; Lee, A.P. Lateral air cavities for microfluidic pumping with the use of acoustic energy. Microfluid. Nanofluid. 2011, 10, 1269–1278. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, D.; Chan, C.Y.; Lin, S.C.S.; Muddana, H.S.; Nama, N.; Benkovic, S.J.; Huang, T.J. Tunable pulsatile chemical gradient generation via acoustically driven oscillating bubbles. Lab. Chip 2013, 13, 328–331. [Google Scholar] [CrossRef]
- Rogers, P.; Neild, A. Selective particle trapping using an oscillating microbubble. Lab. Chip 2011, 11, 3710–3715. [Google Scholar] [CrossRef]
- Xu, Y.; Hashmi, A.; Yu, G.; Lu, X.; Kwon, H.J.; Chen, X.; Xu, J. Microbubble array for on-chip worm processing. Appl. Phys. Lett. 2013, 102, 023702. [Google Scholar] [CrossRef] [Green Version]
- Fujii, S.; Kobayashi, K.; Kanaizuka, K.; Okamoto, T.; Toyabe, S.; Muneyuki, E.; Haga, M.A. Manipulation of single DNA using a micronanobubble formed by local laser heating on a Au-coated surface. Chem. Lett. 2009, 39, 92–93. [Google Scholar] [CrossRef]
- Davim, J.P. Nontraditional Machining Processes: Research Advances; Springer: Berlin/Heidelberg, Germany, 2013; pp. 42–44. ISBN 978-3-662-45088-8. [Google Scholar]
- Cheng, Y.; Yang, J.; Li, Z.; Zhu, D.; Cai, X.; Hu, X.; Xing, X. Microbubble-assisted optofluidic control using a photothermal waveguide. Appl. Phys. Lett. 2017, 111, 151903. [Google Scholar] [CrossRef]
- Skirtach, A.G.; Munoz Javier, A.; Kreft, O.; Köhler, K.; Piera Alberola, A.; Möhwald, H.; Sukhorukov, G.B. Laser-induced release of encapsulated materials inside living cells. Angew. Chem. Int. Ed. 2006, 45, 4612–4617. [Google Scholar] [CrossRef] [PubMed]
- Ochs, M.; Carregal-Romero, S.; Rejman, J.; Braeckmans, K.; De Smedt, S.C.; Parak, W.J. Light-Addressable Capsules as Caged Compound Matrix for Controlled Triggering of Cytosolic Reactions. Angew. Chem. Int. Ed. 2013, 52, 695–699. [Google Scholar] [CrossRef] [PubMed]
- Dykman, L.; Khlebtsov, N. Gold nanoparticles in biomedical applications: Recent advances and perspectives. Chem. Soc. Rev. 2012, 41, 2256–2282. [Google Scholar] [CrossRef] [PubMed]
- Loo, C.; Lowery, A.; Halas, N.; West, J.; Drezek, R. Immunotargeted nanoshells for integrated cancer imaging and therapy. Nano Lett. 2005, 5, 709–711. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.K.; Na, H.K.; Kim, S.; Jang, H.; Chang, S.J.; Min, D.H. One-Pot Synthesis of Multifunctional Au@ Graphene Oxide Nanocolloid Core@ Shell Nanoparticles for Raman Bioimaging, Photothermal, and Photodynamic Therapy. Small 2015, 11, 2527–2535. [Google Scholar] [CrossRef] [PubMed]
- Shao, J.; Xuan, M.; Dai, L.; Si, T.; Li, J.; He, Q. Near-Infrared-Activated Nanocalorifiers in Microcapsules: Vapor Bubble Generation for In Vivo Enhanced Cancer Therapy. Angew. Chem. Int. Ed. 2015, 54, 12782–12787. [Google Scholar] [CrossRef] [PubMed]
- Gong, C.; Gong, Y.; Chen, Q.; Rao, Y.J.; Peng, G.D.; Fan, X. Reproducible fiber optofluidic laser for disposable and array applications. Lab Chip 2017, 17, 3431–3436. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Shu, W.; Wang, Y.; Gong, Y.; Gong, C.; Chen, Q.; Rao, Y.J. Turbidimetric inhibition immunoassay revisited to enhance its sensitivity via an optofluidic laser. Biosens. Bioelectron. 2019, 131, 60–66. [Google Scholar] [CrossRef] [PubMed]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Types | Structures | Applications | Ref. |
|---|---|---|---|
| FPI | Extrinsic/intrinsic cavity | RI sensing | [7] |
| Temperature and humidity sensor | [8] | ||
| MZI/MI | Waist-enlarged fiber taper | Label-free biosensing | [9] |
| Temperature-immune humidity sensing | [10,11] | ||
| Temperature-immune RI sensing | [12] | ||
| MZI/MI | Core-offset | Temperature-immune RI sensing | [13] |
| MZI | Two micro-cavities | RI-immune temperature sensing | [14] |
| SI | Fiber loop mirror | Temperature-immune pressure sensing, High-temperature sensing | [15,16] |
| Device Types | Principle | Fabrication | Features |
|---|---|---|---|
| Stable Single Optical Trap based on single optical force | Strongly focused beam | Fiber taper | Single object trapping with short range [36,37,38,39] |
| Surface evanescent fields | Micro/nanofiber | Massive object trapping on the fiber surface [40,41,42,43,44,45,46,47] | |
| Stable Single Optical Trap based on dual optical force | Balance of two optical forces | Two aligned fiber probes | Object manipulation (~200 μm) [30]. Object deformation [25] |
| Two misaligned fiber probes | Object rotation [31] Object oscillating, and moving around [51] Object lifting, and force sensing [52] Cell regulation and analysis [53,54] | ||
| HC–PCF | Multiple parameter sensing [32] A centimeter-scale long distance optical manipulation, cell deformation [59] | ||
| Stable Combined Optical Trap based on optical scattering force | Fs = Fv | Fiber probe | Long range manipulation and large dynamic range flowmeter [60,61,62,63] Multiple object organization [64,65] Manipulation and transportation [66] |
| Stable Combined Optical Trap based on optical gradient force | Fg = Fv | Microfiber | Massive trapping, manipulation, and selection [42,67,68,69] |
| Device Types | Principle | Fabrication | Features |
|---|---|---|---|
| FOF technology based on a photothermal effect with a microfiber | Enhancing the laser radiation | Fiber taper | Massive particle trapping and manipulation [75] |
| Micro/nanofiber | Massive object trapping on fiber surface [76] Flow rate sensing [80] | ||
| optical fiber ring | Massive object trapping in center of ring [77] | ||
| FOF technology based on a photothermal effect with special materials | Enhancing the laser absorption | Materials integrated with the fiber | Massive object trapping and delivering [81,82] Multiple parameter sensing [83,84,85] |
| Materials integrated with the channel | Microfluid control [86,87,88], massive object manipulation [89,90,91], micromaching processes [92] | ||
| Materials integrated with the channel | Medical treatment with minimally invasive effects [94,95,96,97,98,99] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Xu, B.; Gong, C.; Luo, J.; Zhang, Q.; Gong, Y. Fiber Optofluidic Technology Based on Optical Force and Photothermal Effects. Micromachines 2019, 10, 499. https://doi.org/10.3390/mi10080499
Zhang C, Xu B, Gong C, Luo J, Zhang Q, Gong Y. Fiber Optofluidic Technology Based on Optical Force and Photothermal Effects. Micromachines. 2019; 10(8):499. https://doi.org/10.3390/mi10080499
Chicago/Turabian StyleZhang, Chenlin, Bingjie Xu, Chaoyang Gong, Jingtang Luo, Quanming Zhang, and Yuan Gong. 2019. "Fiber Optofluidic Technology Based on Optical Force and Photothermal Effects" Micromachines 10, no. 8: 499. https://doi.org/10.3390/mi10080499
APA StyleZhang, C., Xu, B., Gong, C., Luo, J., Zhang, Q., & Gong, Y. (2019). Fiber Optofluidic Technology Based on Optical Force and Photothermal Effects. Micromachines, 10(8), 499. https://doi.org/10.3390/mi10080499