
Evolving from Laboratory Toys towards Life-Savers: Small-Scale Magnetic Robotic Systems with Medical Imaging Modalities


Abstract
:1. Introduction
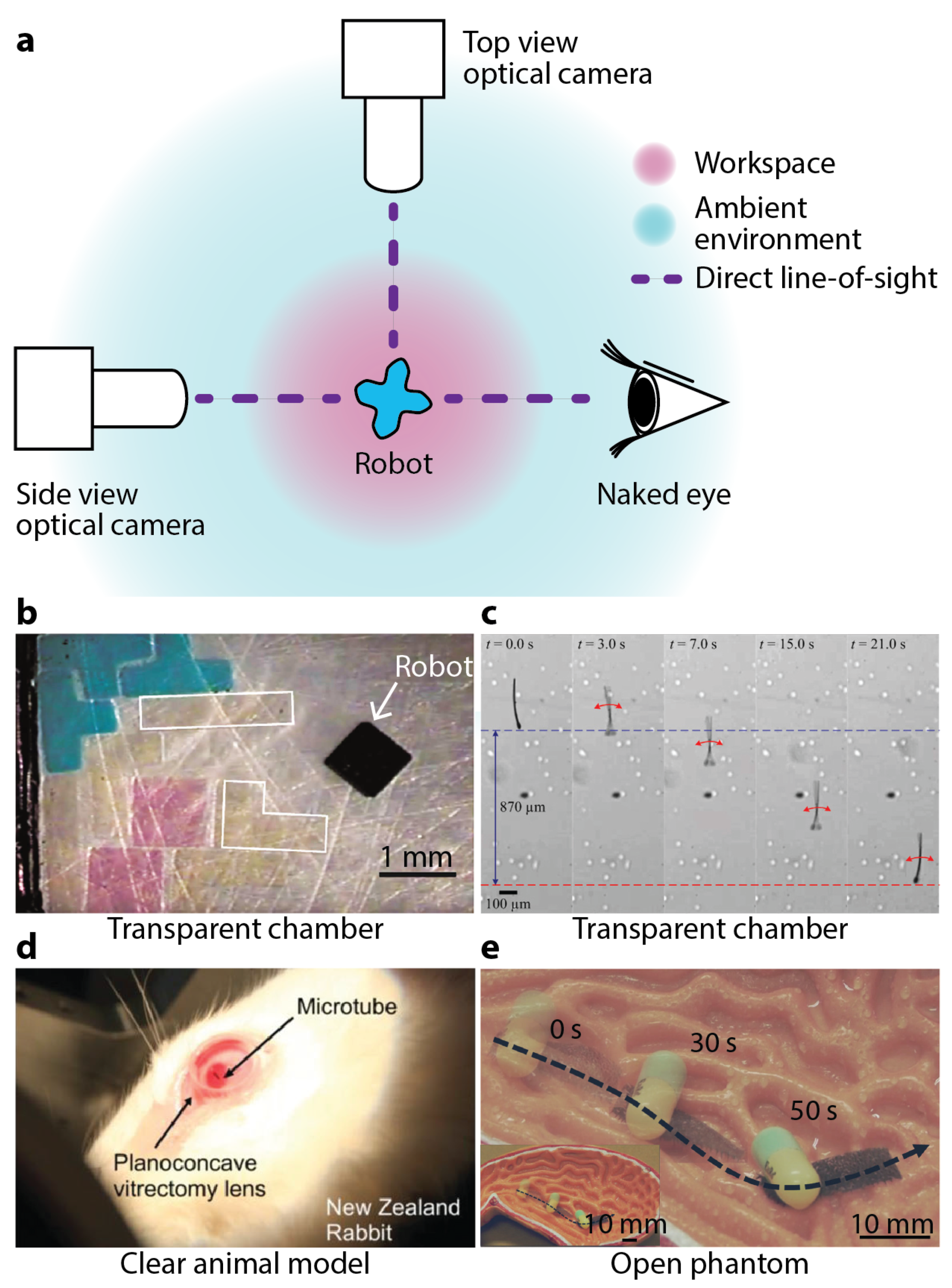
2. Conventional Imaging Setup for Small-Scale Magnetic Robots
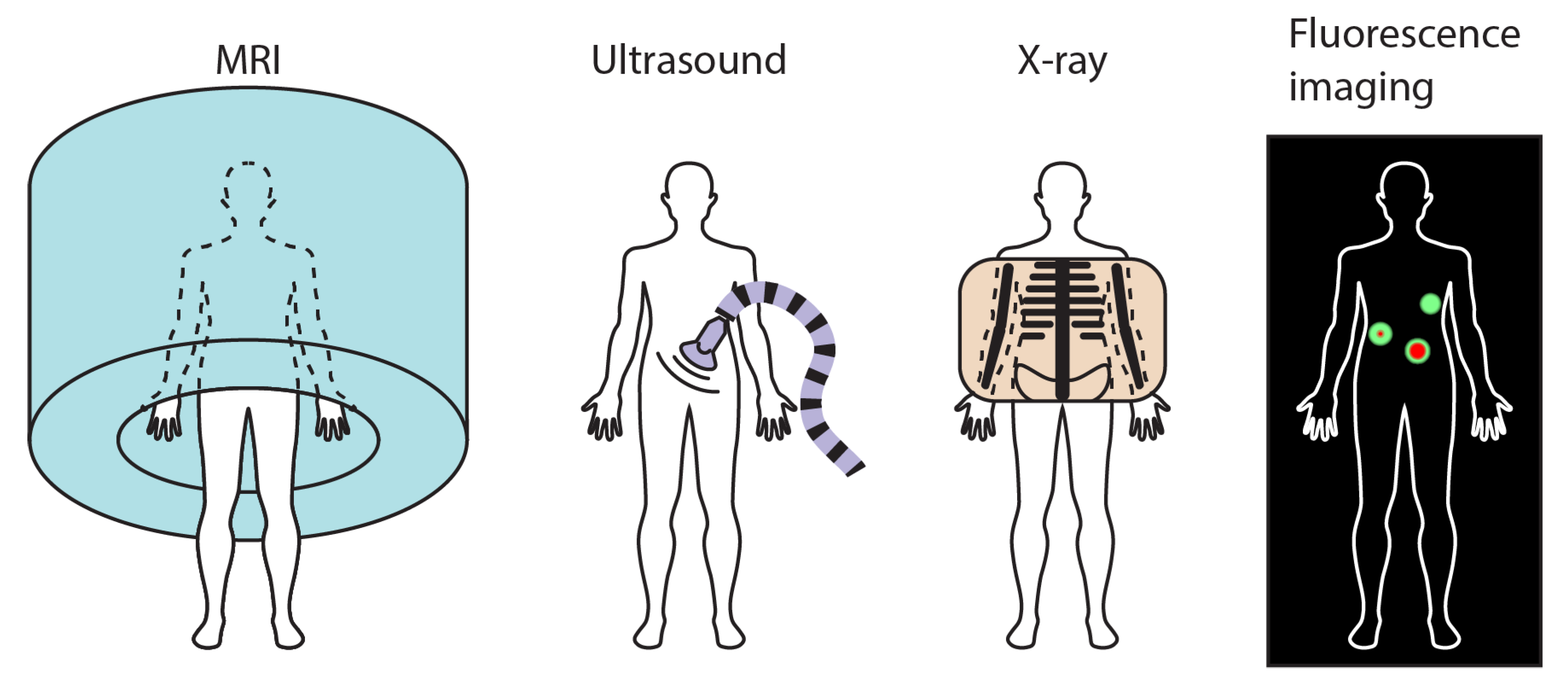
3. Medical Imaging Modalities
4. Integrating Medical Imaging Modalities in Small-Scale Magnetic Robots
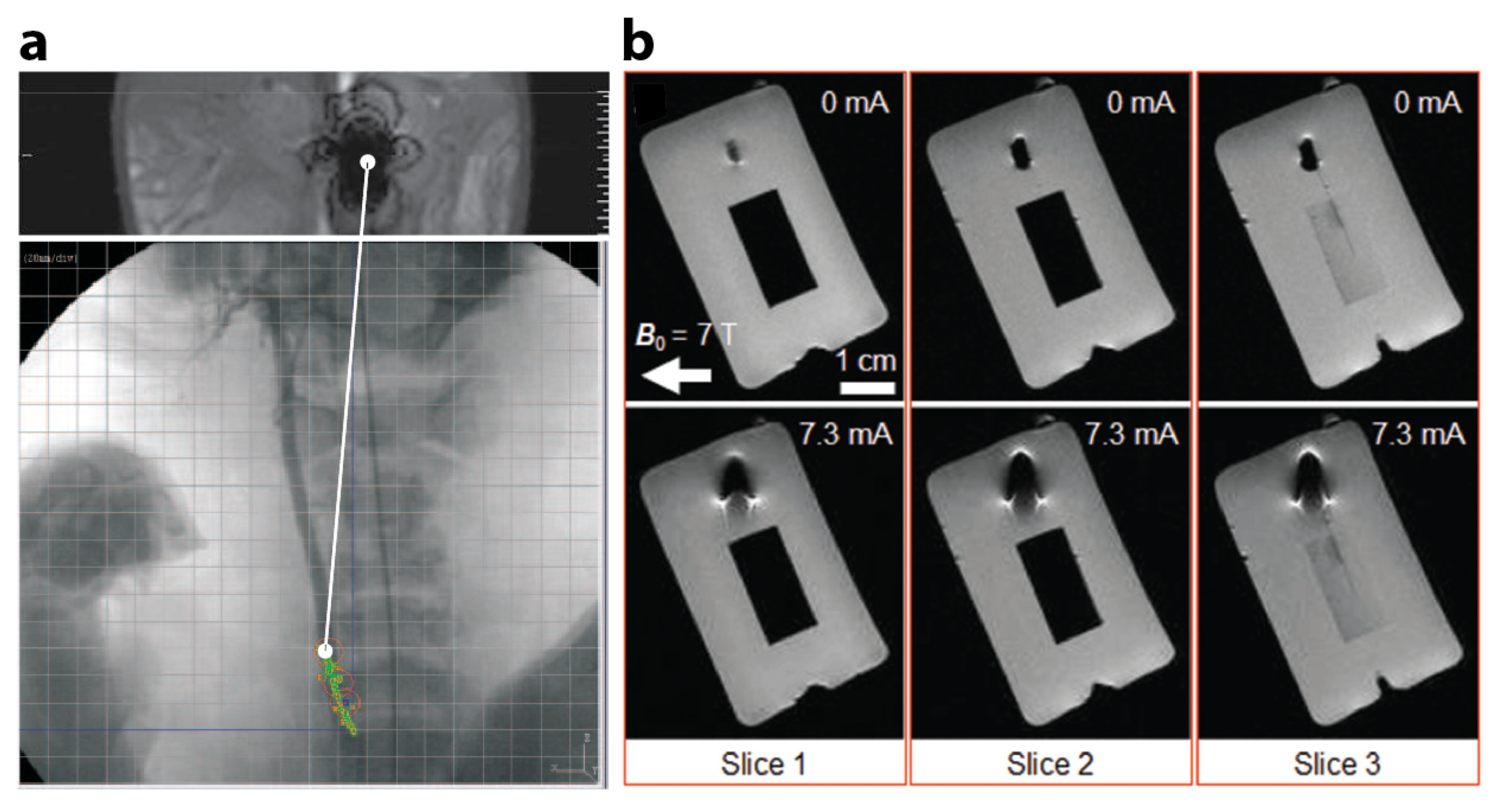
4.1. Small-Scale Magnetic Robotic Systems with MRI
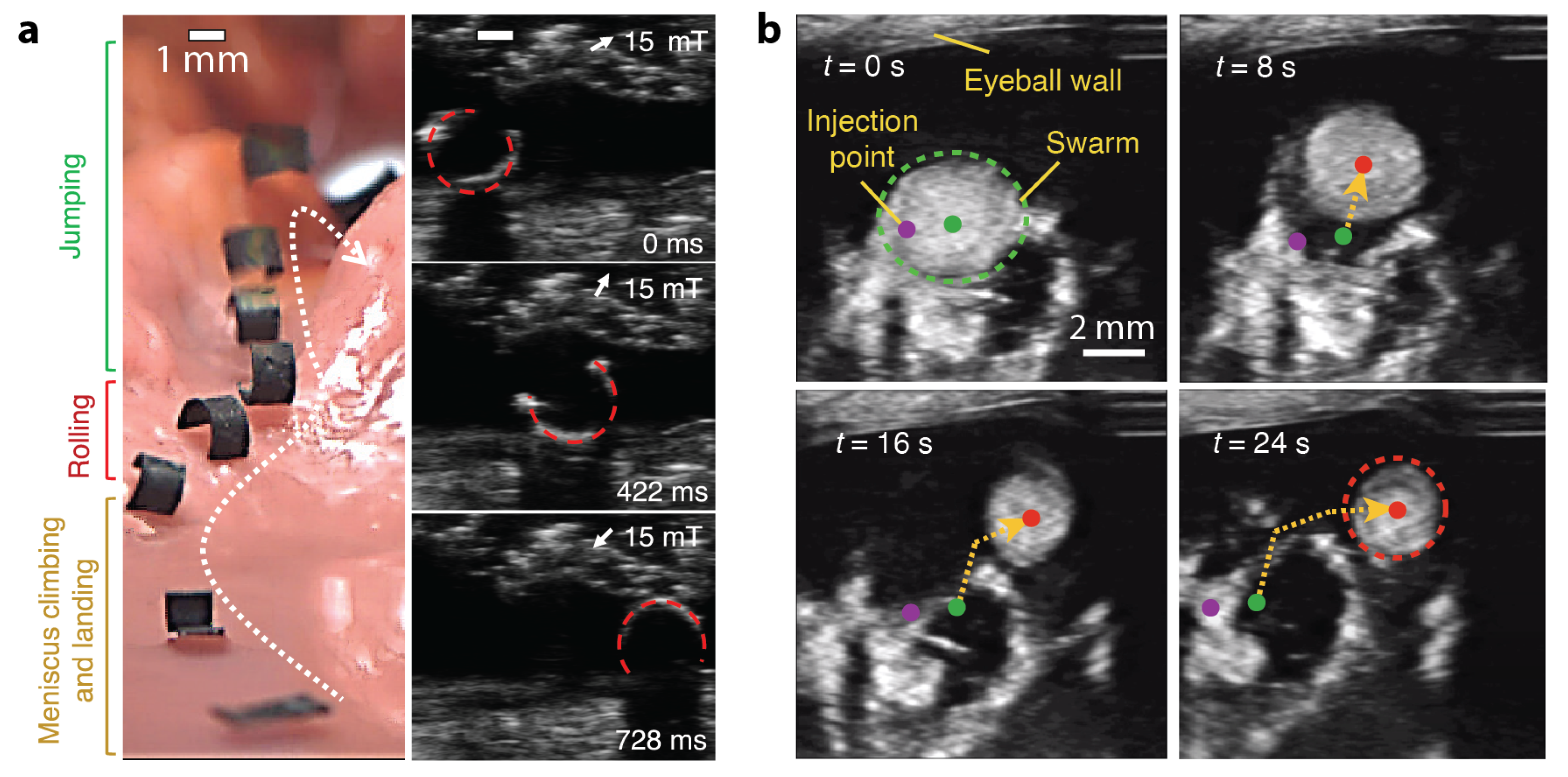
4.2. Small-Scale Magnetic Robotic Systems with US Imaging
4.3. Small-Scale Magnetic Robotic Systems with X-ray Imaging
4.4. Small-Scale Magnetic Robotic Systems with Fluorescence Imaging
5. Outlook
Funding
Conflicts of Interest
References
- Gunduz, S.; Albadawi, H.; Oklu, R. Robotic Devices for Minimally Invasive Endovascular Interventions: A New Dawn for Interventional Radiology. Adv. Intell. Syst. 2020, 3, 2000181. [Google Scholar] [CrossRef]
- Onaizah, O.; Xu, L.; Middleton, K.; You, L.; Diller, E. Local stimulation of osteocytes using a magnetically actuated oscillating beam. PLoS ONE 2020, 15, e0235366. [Google Scholar] [CrossRef] [PubMed]
- Onaizah, O.; Diller, E.D. Tethereless mobile micro-surgical scissors using magnetic actuation. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 894–899. [Google Scholar]
- Forbrigger, C.; Lim, A.; Onaizah, O.; Salmanipour, S.; Looi, T.; Drake, J.; Diller, E.D. Cable-less, magnetically driven forceps for minimally invasive surgery. IEEE Robot. Autom. Lett. 2019, 4, 1202–1207. [Google Scholar] [CrossRef]
- Sitti, M.; Ceylan, H.; Hu, W.; Giltinan, J.; Turan, M.; Yim, S.; Diller, E. Biomedical Applications of Untethered Mobile Milli/Microrobots. Proc. IEEE 2015, 103, 205–224. [Google Scholar] [CrossRef] [PubMed]
- Sliker, L.; Ciuti, G.; Rentschler, M.; Menciassi, A. Magnetically driven medical devices: A review. Expert Rev. Med. Devices 2015, 12, 737–752. [Google Scholar] [CrossRef]
- Nelson, B.J.; Kaliakatsos, I.; Abbott, J. Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Y.; Zhang, J.; Hu, W.; Khan, M.T.A.; Sitti, M. Shape-programmable liquid crystal elastomer structures with arbitrary three-dimensional director fields and geometries. Nat. Commun. 2021, 12, 5936. [Google Scholar] [CrossRef] [PubMed]
- Bozuyuk, U.; Alapan, Y.; Aghakhani, A.; Yunusa, M.; Sitti, M. Shape anisotropy-governed locomotion of surface microrollers on vessel-like microtopographies against physiological flows. Proc. Natl. Acad. Sci. USA 2021, 118, e2022090118. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Ze, Q.; Dai, J.; Udipi, N.; Paulino, G.H.; Zhao, R. Stretchable origami robotic arm with omnidirectional bending and twisting. Proc. Natl. Acad. Sci. USA 2021, 118, e2110023118. [Google Scholar] [CrossRef] [PubMed]
- Sharif, S.; Nguyen, K.T.; Bang, D.; Park, J.O.; Choi, E. Optimization of field-free point position, gradient field and ferromagnetic polymer ratio for enhanced navigation of magnetically controlled polymer-based microrobots in blood vessel. Micromachines 2021, 12, 424. [Google Scholar] [CrossRef] [PubMed]
- Sun, H.C.M.; Liao, P.; Wei, T.; Zhang, L.; Sun, D. Magnetically powered biodegradable microswimmers. Micromachines 2020, 11, 404. [Google Scholar] [CrossRef]
- Yuan, S.; Wan, Y.; Song, S. RectMag3D: A magnetic actuation system for steering milli/microrobots based on rectangular electromagnetic coils. Appl. Sci. 2020, 10, 2677. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Onaizah, O.; Sadri, A.; Diller, E. A generic label-free microfluidic microobject sorter using a magnetic elastic diverter. Biomed. Microdevices 2017, 19, 43. [Google Scholar] [CrossRef]
- Diller, E.; Giltinan, J.; Lum, G.Z.; Ye, Z.; Sitti, M. Six-degree-of-freedom magnetic actuation for wireless microrobotics. Int. J. Robot. Res. 2016, 35, 114–128. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Diller, E.; Giltinan, J.; Jena, P.; Sitti, M. Independent control of multiple magnetic microrobots in three dimensions. Int. J. Robot. Res. 2013, 32, 614–631. [Google Scholar] [CrossRef]
- Diller, E.; Miyashita, S.; Sitti, M. Remotely addressable magnetic composite micropumps. RSC Adv. 2012, 2, 3850. [Google Scholar] [CrossRef]
- Diller, E.; Miyashita, S.; Sitti, M. Magnetic hysteresis for multi-state addressable magnetic microrobotic control. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 2325–2331. [Google Scholar]
- Floyd, S.; Diller, E.; Pawashe, C.; Sitti, M. Control methodologies for a heterogeneous group of untethered magnetic micro-robots. Int. J. Robot. Res. 2011, 30, 1553–1565. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 2703. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef]
- Zhang, J.; Onaizah, O.; Middleton, K.; You, L.; Diller, E. Reliable grasping of three-dimensional untethered mobile magnetic microgripper for autonomous pick-and-place. IEEE Robot. Autom. Lett. 2017, 2, 835–840. [Google Scholar] [CrossRef]
- Zhang, J.; Diller, E. Tetherless mobile micrograsping using a magnetic elastic composite material. Smart Mater. Struct. 2016, 25, 11LT03. [Google Scholar] [CrossRef] [Green Version]
- Diller, E.; Sitti, M. Three-dimensional programmable assembly by untethered magnetic robotic micro-grippers. Adv. Funct. Mater. 2014, 24, 4397–4404. [Google Scholar] [CrossRef]
- Tasoglu, S.; Diller, E.; Guven, S.; Sitti, M.; Demirci, U. Untethered micro-robotic coding of three-dimensional material composition. Nat. Commun. 2014, 5, 3124. [Google Scholar] [CrossRef]
- Hortelao, A.C.; Simó, C.; Guix, M.; Guallar-Garrido, S.; Julián, E.; Vilela, D.; Rejc, L.; Ramos-Cabrer, P.; Cossío, U.; Gómez-Vallejo, V.; et al. Swarming behavior and in vivo monitoring of enzymatic nanomotors within the bladder. Sci. Robot. 2021, 6, eabd2823. [Google Scholar] [CrossRef] [PubMed]
- Xie, H.; Sun, M.; Fan, X.; Lin, Z.; Chen, W.; Wang, L.; Dong, L.; He, Q. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation. Sci. Robot. 2019, 4, eaav8006. [Google Scholar] [CrossRef]
- Yu, J.; Wang, B.; Du, X.; Wang, Q.; Zhang, L. Ultra-extensible ribbon-like magnetic microswarm. Nat. Commun. 2018, 9, 3260. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Chan, K.F.; Yu, J.; Wang, Q.; Yang, L.; Chiu, P.W.Y.; Zhang, L. Reconfigurable Swarms of Ferromagnetic Colloids for Enhanced Local Hyperthermia. Adv. Funct. Mater. 2018, 28, 1705701. [Google Scholar] [CrossRef]
- Martel, S.; Mohammadi, M. Using a swarm of self-propelled natural microrobots in the form of flagellated bacteria to perform complex micro-assembly tasks. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 500–505. [Google Scholar]
- Khalil, I.; Dijkslag, H.; Abelmann, L.; Misra, S. MagnetoSperm: A microrobot that navigates using weak magnetic fields. Appl. Phys. Lett. 2014, 104, 223701. [Google Scholar] [CrossRef]
- Chatzipirpiridis, G.; Ergeneman, O.; Pokki, J.; Ullrich, F.; Fusco, S.; Ortega, J.A.; Sivaraman, K.M.; Nelson, B.J.; Pané, S. Electroforming of implantable tubular magnetic microrobots for wireless ophthalmologic applications. Adv. Healthc. Mater. 2015, 4, 209–214. [Google Scholar] [CrossRef] [PubMed]
- Lu, H.; Zhang, M.; Yang, Y.; Huang, Q.; Fukuda, T.; Wang, Z.; Shen, Y. A bioinspired multilegged soft millirobot that functions in both dry and wet conditions. Nat. Commun. 2018, 9, 3944. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, J.; Guo, Y.; Hu, W.; Soon, R.H.; Davidson, Z.S.; Sitti, M. Liquid crystal elastomer-based magnetic composite films for reconfigurable shape-morphing soft miniature machines. Adv. Mater. 2021, 33, 2006191. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Guo, Y.; Hu, W.; Sitti, M. Wirelessly actuated thermo- and magneto-responsive soft bimorph materials with programmable shape-morphing. Adv. Mater. 2021, 33, 2100336. [Google Scholar] [CrossRef] [PubMed]
- Pham, L.N.; Steiner, J.A.; Leang, K.K.; Abbott, J.J. Soft endoluminal robots propelled by rotating magnetic dipole fields. IEEE Trans. Med. Robot. Bionics 2020, 2, 598–607. [Google Scholar] [CrossRef]
- Gu, H.; Boehler, Q.; Cui, H.; Secchi, E.; Savorana, G.; De Marco, C.; Gervasoni, S.; Peyron, Q.; Huang, T.Y.; Pane, S.; et al. Magnetic cilia carpets with programmable metachronal waves. Nat. Commun. 2020, 11, 2637. [Google Scholar] [CrossRef]
- Dong, X.; Sitti, M. Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms. Int. J. Robot. Res. 2020, 39, 617–638. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Wang, B.; Yu, E.; Yu, J.; Zhang, L. Collective behavior of reconfigurable magnetic droplets via dynamic self-assembly. ACS Appl. Mater. Interfaces 2019, 11, 1630–1637. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Diller, E. Untethered miniature soft robots: Modeling and design of a millimeter-scale swimming magnetic sheet. Soft Robot. 2018, 5, 761–776. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Salehizadeh, M.; Diller, E. Parallel pick and place using two independent untethered mobile magnetic microgrippers. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018. [Google Scholar]
- Zhang, J.; Diller, E. Millimeter-scale magnetic swimmers using elastomeric undulations. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1706–1711. [Google Scholar]
- Diller, E.; Zhuang, J.; Lum, G.; Edwards, M.; Sitti, M. Continuously distributed magnetization profile for millimeter-scale elastomeric undulatory swimming. Appl. Phys. Lett. 2014, 104, 174101. [Google Scholar] [CrossRef]
- Snezhko, A.; Belkin, M.; Aranson, I.S.; Kwok, W.K. Self-assembled magnetic surface swimmers. Phys. Rev. Lett. 2009, 102, 2–5. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Du, X.; Yu, J.; Jin, D.; Chiu, P.W.Y.; Zhang, L. Independent Pattern Formation of Nanorod and Nanoparticle Swarms under an Oscillating Field. ACS Nano 2021, 15, 4429–4439. [Google Scholar] [CrossRef]
- Khalil, I.S.; Klingner, A.; Hamed, Y.; Hassan, Y.S.; Misra, S. Controlled noncontact manipulation of nonmagnetic untethered microbeads orbiting two-tailed soft microrobot. IEEE Trans. Robot. 2020, 36, 1320–1332. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, J.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robot. 2019, 4, eaav4494. [Google Scholar] [CrossRef]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-printed biodegradable microswimmer for theranostic cargo delivery and release. ACS Nano 2019, 13, 3353–3362. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, J.; Huang, T.y.; Luo, Z.; Testa, P.; Gu, H. Nanomagnetic encoding of shape-morphing micromachines. Nature 2019, 575, 164–168. [Google Scholar] [CrossRef] [PubMed]
- Hosney, A.; Klingner, A.; Misra, S.; Khalil, I.S.M. Propulsion and steering of helical magnetic microrobots using two synchronized rotating dipole fields in three-dimensional space. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1988–1993. [Google Scholar]
- Khalil, I.S.; Abelmann, L.; Misra, S. Magnetic-based motion control of paramagnetic microparticles with disturbance compensation. IEEE Trans. Magn. 2014, 50, 1–10. [Google Scholar] [CrossRef]
- Hagiwara, M.; Kawahara, T.; Iijima, T.; Arai, F. High-speed magnetic microrobot actuation in a microfluidic chip by a fine V-groove surface. IEEE Trans. Robot. 2013, 29, 363–372. [Google Scholar] [CrossRef]
- Diller, E.; Floyd, S.; Pawashe, C.; Sitti, M. Control of multiple heterogeneous magnetic micro-robots on non-specialized surfaces. IEEE Trans. Robot. 2012, 28, 172–182. [Google Scholar] [CrossRef]
- Zhang, L.; Abbott, J.; Dong, L.; Kratochvil, B.; Bell, D.; Nelson, B.J. Artificial bacterial flagella: Fabrication and magnetic control. Appl. Phys. Lett. 2009, 94, 064107. [Google Scholar] [CrossRef] [Green Version]
- Pawashe, C.; Floyd, S.; Diller, E.; Sitti, M. Two-dimensional autonomous microparticle manipulation strategies for magnetic microrobots in fluidic environments. IEEE Trans. Robot. 2012, 28, 467–477. [Google Scholar] [CrossRef] [Green Version]
- Ryan, P.; Diller, E. Magnetic actuation for full dexterity microrobotic control using rotating permanent magnets. IEEE Trans. Robot. 2017, 33, 1398–1409. [Google Scholar] [CrossRef]
- Huang, C.; Xu, T.; Liu, J.; Manamanchaiyaporn, L.; Wu, X. Visual Servoing of Miniature Magnetic Film Swimming Robots for 3-D Arbitrary Path Following. IEEE Robot. Autom. Lett. 2019, 4, 4185–4191. [Google Scholar] [CrossRef]
- Dong, D.; Lam, W.S.; Sun, D. Electromagnetic Actuation of Microrobots in a Simulated Vascular Structure with a Position Estimator Based Motion Controller. IEEE Robot. Autom. Lett. 2020, 5, 6255–6261. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, Z.; Hu, W.; Soon, R.H.; Yasa, I.C.; Liu, Z.; Sitti, M. Voxelated three-dimensional miniature magnetic soft machines via multimaterial heterogeneous assembly. Sci. Robot. 2021, 6, abf0112. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Shang, W.; Lu, H.; Liu, Y.; Yang, L.; Tan, R.; Wu, X.; Shen, Y. An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications. Sci. Robot. 2020, 5, abc8191. [Google Scholar] [CrossRef]
- Son, D.; Dogan, M.D.; Sitti, M. Magnetically actuated soft capsule endoscope for fine-needle aspiration biopsy. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 1132–1139. [Google Scholar]
- Dong, Y.; Wang, L.; Yuan, K.; Ji, F.; Gao, J.; Zhang, Z.; Du, X.; Tian, Y.; Wang, Q.; Zhang, L. Magnetic Microswarm Composed of Porous Nanocatalysts for Targeted Elimination of Biofilm Occlusion. ACS Nano 2021, 15, 5056–5067. [Google Scholar] [CrossRef]
- Zhang, Z.; Klingner, A.; Misra, S.; Khalil, I.S. Control of magnetically-driven screws in a viscoelastic medium. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 24 October 2020; pp. 2840–2846. [Google Scholar]
- Kim, Y.; Parada, G.A.; Liu, S.; Zhao, X. Ferromagnetic soft continuum robots. Sci. Robot. 2019, 4, aax7329. [Google Scholar] [CrossRef]
- Huang, L.; Rogowski, L.; Kim, M.J.; Becker, A.T. Path planning and aggregation for a microrobot swarm in vascular networks using a global input. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 414–420. [Google Scholar]
- Khalil, I.S.; Tabak, A.F.; Sadek, K.; Mahdy, D.; Hamdi, N.; Sitti, M. Rubbing Against Blood Clots Using Helical Robots: Modeling and in Vitro Experimental Validation. IEEE Robot. Autom. Lett. 2017, 2, 927–934. [Google Scholar] [CrossRef]
- Ullrich, F.; Bergeles, C.; Pokki, J.; Ergeneman, O.; Erni, S.; Chatzipirpiridis, G.; Pané, S.; Framme, C.; Nelson, B.J. Mobility experiments with microrobots for minimally invasive intraocular surgery. Investig. Ophthalmol. Vis. Sci. 2013, 54, 2853–2863. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Manamanchaiyaporn, L.; Tang, X.; Zheng, Y.; Yan, X. Molecular Transport of a Magnetic Nanoparticle Swarm towards Thrombolytic Therapy. IEEE Robot. Autom. Lett. 2021, 6, 5605–5612. [Google Scholar] [CrossRef]
- Hendee, W.R.; Ritenour, E.R. Medical Imaging Physics; John Wiley & Sons: New York, NY, USA, 2003. [Google Scholar]
- Felfoul, O.; Mathieu, J.B.; Beaudoin, G.; Martel, S. In vivo MR-tracking based on magnetic signature selective excitation. IEEE Trans. Med. Imaging 2008, 27, 28–35. [Google Scholar] [CrossRef] [PubMed]
- Martel, S.; Mohammadi, M.; Felfoul, O.; Zhao, L.; Pouponneau, P. Flagellated magnetotactic cacteria as controlled MRI-trackable propulsion and steering systems for medical nanorobots operating in the human microvasculature. Int. J. Robot. Res. 2009, 28, 571–582. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martel, S.; Felfoul, O.; Mathieu, J.B.; Chanu, A.; Tamaz, S.; Mohammadi, M.; Mankiewicz, M.; Tabatabaei, N. MRI-based medical nanorobotics platform for the control of magnetic nanoparticles and flagellated bacteria for target interventions in human capillaries. Int. J. Robot. Res. 2009, 28, 1169–1182. [Google Scholar] [CrossRef] [PubMed]
- Mutlu, S.; Yasa, O.; Erin, O.; Sitti, M. Magnetic resonance imaging-compatible optically powered miniature wireless modular Lorentz force actuators. Adv. Sci. 2020, 8, 2002948. [Google Scholar] [CrossRef] [PubMed]
- Yan, X.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.; Xu, J.; Xu, T.; Tang, T.; Bian, L.; Wang, Y.X.J.; et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2, eaaq1155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.; Li, Z.; Gao, C.; Fan, X.; Pang, Y.; Li, T.; Wu, Z.; Xie, H.; He, Q. Dual-responsive biohybrid neutrobots for active target delivery. Sci. Robot. 2021, 6, eaaz9519. [Google Scholar] [CrossRef] [PubMed]
- Lalande, V.; Gosselin, F.P.; Vonthron, M.; Conan, B.; Tremblay, C.; Beaudoin, G.; Soulez, G.; Martel, S. In vivo demonstration of magnetic guidewire steerability in a MRI system with additional gradient coils. Med. Phys. 2015, 42, 969–976. [Google Scholar] [CrossRef]
- Erin, O.; Gilbert, H.B.; Tabak, A.F.; Sitti, M. Elevation and azimuth rotational actuation of an untethered millirobot by MRI gradient coils. IEEE Trans. Robot. 2019, 35, 1323–1337. [Google Scholar] [CrossRef]
- Erin, O.; Alici, C.; Sitti, M. Design, actuation, and control of an MRI-powered untethered robot for wireless capsule endoscopy. IEEE Robot. Autom. Lett. 2021, 6, 6000–6007. [Google Scholar] [CrossRef]
- Erin, O.; Boyvat, M.; Lazovic, J.; Tiryaki, M.E.; Sitti, M. Wireless MRI-powered reversible orientation-locking capsule robot. Adv. Sci. 2021, 8, 2100463. [Google Scholar] [CrossRef]
- Tiryaki, M.E.; Erin, Ö.; Sitti, M.; Erin, Ö. A realistic simulation environment for MRI-based robust control of untethered magnetic robots with intra-operational imaging. IEEE Robot. Autom. Lett. 2020, 5, 4501–4508. [Google Scholar] [CrossRef]
- Belharet, K.; Folio, D.; Ferreira, A. Endovascular navigation of a ferromagnetic microrobot using MRI-based predictive control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 2804–2809. [Google Scholar]
- Wells, P.N. Ultrasound imaging. Phys. Med. Biol. 2006, 51, R83. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, T.; Hu, W.; Sitti, M. A magnetically-actuated untethered jellyfish-inspired soft milliswimmer. In Proceedings of the Robotics: Science and System Conference, Freiburg im Breisgau, Germany, 22–26 June 2019. [Google Scholar]
- Yu, J.; Jin, D.; Chan, K.F.; Wang, Q.; Yuan, K.; Zhang, L. Active generation and magnetic actuation of microrobotic swarms in bio-fluids. Nat. Commun. 2019, 10, 5631. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, T.; Hu, W.; Ren, Z.; Sitti, M. Ultrasound-guided wireless tubular robotic anchoring system. IEEE Robot. Autom. Lett. 2020, 5, 4859–4866. [Google Scholar] [CrossRef]
- Niedert, E.E.; Bi, C.; Adam, G.; Lambert, E.; Solorio, L.; Goergen, C.J.; Cappelleri, D.J. A tumbling magnetic microrobot system for biomedical applications. Micromachines 2020, 11, 861. [Google Scholar] [CrossRef]
- Wang, B.; Chan, K.F.; Yuan, K.; Wang, Q.; Xia, X.; Yang, L.; Ko, H.; Wang, Y.X.J.; Sung, J.J.Y.; Chiu, P.W.Y.; et al. Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging. Sci. Robot. 2021, 6, eabd2813. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Chan, K.F.; Schweizer, K.; Du, X.; Jin, D.; Yu, S.C.H.; Nelson, B.J.; Zhang, L. Ultrasound Doppler-guided real-time navigation of a magnetic microswarm for active endovascular delivery. Sci. Adv. 2021, 7, abe5914. [Google Scholar] [CrossRef] [PubMed]
- Youssefi, O.; Diller, E. Contactless robotic micromanipulation in air using a magneto-acoustic system. IEEE Robot. Autom. Lett. 2019, 4, 1580–1586. [Google Scholar] [CrossRef]
- Darmawan, B.A.; Lee, S.B.; Nguyen, V.D.; Go, G.; Nguyen, K.T.; Lee, H.S.; Nan, M.; Hong, A.; Kim, C.S.; Li, H.; et al. Self-folded microrobot for active drug delivery and rapid ultrasound-triggered drug release. Sens. Actuators B Chem. 2020, 324, 128752. [Google Scholar] [CrossRef]
- Nguyen, P.B.; Kang, B.; Bappy, D.M.; Choi, E.; Park, S.; Ko, S.Y.; Park, J.O.; Kim, C.S. Real-time microrobot posture recognition via biplane X-ray imaging system for external electromagnetic actuation. Int. J. Comput. Assist. Radiol. Surg. 2018, 13, 1843–1852. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Go, G.; Jin, Z.; Darmawan, B.A.; Yoo, A.; Kim, S.; Nan, M.; Lee, S.B.; Kang, B.; Kim, C.S.; et al. A magnetically guided self-rolled microrobot for targeted drug delivery, real-time X-Ray imaging, and microrobot retrieval. Adv. Healthc. Mater. 2021, 10, 2001681. [Google Scholar] [CrossRef]
- Das, P.; Santos, S.; Park, G.K.; Hoseok, I.; Choi, H.S. Real-time fluorescence imaging in thoracic surgery. Korean J. Thorac. Cardiovasc. Surg. 2019, 52, 205–220. [Google Scholar] [CrossRef] [PubMed]
- Servant, A.; Qiu, F.; Mazza, M.; Kostarelos, K.; Nelson, B.J. Controlled in vivo swimming of a swarm of bacteria-like microrobotic flagella. Adv. Mater. 2015, 27, 2981–2988. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Li, X.; Luo, T.; Wang, R.; Liu, C.; Chen, S.; Li, D.; Yue, J.; Cheng, S.H.; Sun, D. Development of a magnetic microrobot for carrying and delivering targeted cells. Sci. Robot. 2018, 3, aat8829. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Chen, X.; Alcântara, C.C.J.; Sevim, S.; Hoop, M.; Terzopoulou, A.; de Marco, C.; Hu, C.; de Mello, A.J.; Falcaro, P.; et al. MOFBOTS: Metal–organic-framework-based biomedical microrobots. Adv. Mater. 2019, 31, 1901592. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Yang, L.; Vong, C.I.; Chan, K.F.; Wu, W.K.K.; Kwong, T.N.Y.; Lo, N.W.S.; Ip, M.; Wong, S.H.; et al. Real-time tracking of fluorescent magnetic spore–based microrobots for remote detection of C. diff toxins. Sci. Adv. 2019, 5, eaau9650. [Google Scholar] [CrossRef] [Green Version]
- Jeon, S.; Kim, S.; Ha, S.; Lee, S.; Kim, E.; Kim, S.Y.; Park, S.H.; Jeon, J.H.; Kim, S.W.; Moon, C.; et al. Magnetically actuated microrobots as a platform for stem cell transplantation. Sci. Robot. 2019, 4, aav4317. [Google Scholar] [CrossRef]
- Yasa, I.C.; Ceylan, H.; Bozuyuk, U.; Wild, A.M.; Sitti, M. Elucidating the interaction dynamics between microswimmer body and immune system for medical microrobots. Sci. Robot. 2020, 5, aaz3867. [Google Scholar] [CrossRef]
- Choyke, P.L.; Alford, R.; Simpson, H.M.; Duberman, J.; Craig Hill, G.; Ogawa, M.; Regino, C.; Kobayashi, H. Toxicity of organic fluorophores used in molecular imaging: Literature review. Mol. Imaging 2009, 8, 341–354. [Google Scholar]
- Xie, L.; Pang, X.; Yan, X.; Dai, Q.; Lin, H.; Ye, J.; Cheng, Y.; Zhao, Q.; Ma, X.; Zhang, X.; et al. Photoacoustic imaging-trackable magnetic microswimmers for pathogenic bacterial infection treatment. ACS Nano 2020, 14, 2880–2893. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Troll, J.; Jeong, H.H.; Wei, Q.; Stang, M.; Ziemssen, F.; Wang, Z.; Dong, M.; Schnichels, S.; Qiu, T.; et al. A swarm of slippery micropropellers penetrates the vitreous body of the eye. Sci. Adv. 2018, 4, aat4388. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Small-Scale Magnetic Robot | Workspace | Reference |
|---|---|---|
| Micro/nanorobot with a ferromagnetic core | In vitro and in vivo with tortuous phantom and animal models | 2008 [71] |
| Flagellated magnetotactic bacterium | Carotid artery of a living swine | 2009 [72,73] |
| Ferromagnetic catheter | Renal arteries of rabbits | 2015 [77] |
| Biohybrid helical microswimmers | Rodent stomachs | 2017 [75] |
| Millirobot | Silicone oil pool in a square clear container | 2019 [78] |
| Millimetre-scale Lorentz force actuator module | A square clear plastic container | 2020 [74] |
| Centermetre-scale capsule reversible orientation-locking robot (REVOLBOT) | A synthetic maze embedded in a phosphate-buffered saline (PBS) solution | 2021 [79,80] |
| Neutrophil-based microrobot (“neutrobot”) | In vivo with a glioma-bearing mice | 2021 [76] |
| Small-Scale Magnetic Robot | Workspace | Reference |
|---|---|---|
| Soft sheet robot with a continuously varying sinusoidal magnetization profile | Chamber phantom made with chicken meat | 2018 [84] |
| Jellyfish robot | Water-filled bladder phantom | 2019 [85] |
| Swarm nanorobot | Bovine eyeballs | 2019 [86] |
| Anchoring robot | Tubular phantom | 2020 [87] |
| Tumbling robot | Ex vivo, in vitro, in situ, and in vivo | 2020 [88] |
| Magnetic stem cell spheroid microrobots (MSCSMs) | Bile duct (in vitro and in vivo) | 2021 [89] |
| Nanoparticle microswarm | Near the boundary of porcine coronary artery ex vivo | 2021 [90] |
| Small-Scale Magnetic Robot | Workspace | Reference |
|---|---|---|
| Bullet-shaped millirobot | Vessel phantom | 2018 [93] |
| M-skin millirobot | Stomach of rabbit | 2020 [61] |
| Self-rolled microrobot | Vessel phantom | 2021 [94] |
| Small-Scale Magnetic Robot | Workspace | Reference |
|---|---|---|
| Bacteria-like microrobotic flagella | Intra peritoneal cavity of mouse | 2015 [96] |
| Biohybrid helical microswimmers | Subcutaneous tissue of nude mice | 2017 [75] |
| Burr-like porous spherical microrobot | Dorsum of nude mice | 2018 [97] |
| Metal-organic-framework-based biomedical microrobots (MOFBOTS) | Microfluidic device | 2019 [98] |
| Fluorescent magnetic spore-based microrobots (FMSMs) | Liquid media | 2019 [99] |
| Cylindrical, hexahedral, helical, and spherical scaffold-type microrobots | In vitro, ex vivo, and in vivo | 2019 [100] |
| Double-helical microswimmer | Petri dish | 2020 [101] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J. Evolving from Laboratory Toys towards Life-Savers: Small-Scale Magnetic Robotic Systems with Medical Imaging Modalities. Micromachines 2021, 12, 1310. https://doi.org/10.3390/mi12111310
Zhang J. Evolving from Laboratory Toys towards Life-Savers: Small-Scale Magnetic Robotic Systems with Medical Imaging Modalities. Micromachines. 2021; 12(11):1310. https://doi.org/10.3390/mi12111310
Chicago/Turabian StyleZhang, Jiachen. 2021. "Evolving from Laboratory Toys towards Life-Savers: Small-Scale Magnetic Robotic Systems with Medical Imaging Modalities" Micromachines 12, no. 11: 1310. https://doi.org/10.3390/mi12111310
APA StyleZhang, J. (2021). Evolving from Laboratory Toys towards Life-Savers: Small-Scale Magnetic Robotic Systems with Medical Imaging Modalities. Micromachines, 12(11), 1310. https://doi.org/10.3390/mi12111310