
Kuhn–Munkres Algorithm-Based Matching Method and Automatic Device for Tiny Magnetic Steel Pair


Abstract
:1. Introduction
- Data collection. The size and surface magnetic flux density of TMSBs (n-TMSB and s-TMSB mean the TMSBs as the N-pole and S-pole of an air-gap magnetic field) are measured and saved.
- Matching process. According to the surface magnetic flux density of n-TMSBs and s-TMSBs, those qualified TMSBs are preliminarily screened out and estimated to make sure of the possibility of TMSPs. As a result, the likely suitable TMSPs will be found out (here ‘suitable’ means that their air-gap magnetic flux density is high enough).
- nResult verification. Based on the estimated combinations, the qualified TMSBs are assembled into the corresponding magnet bases to form TMSPs. Then, the air-gap magnetic field in each TMSP is measured to verify the performance.
2. TMSP Matching Method
2.1. Principle of Matching Algorithm
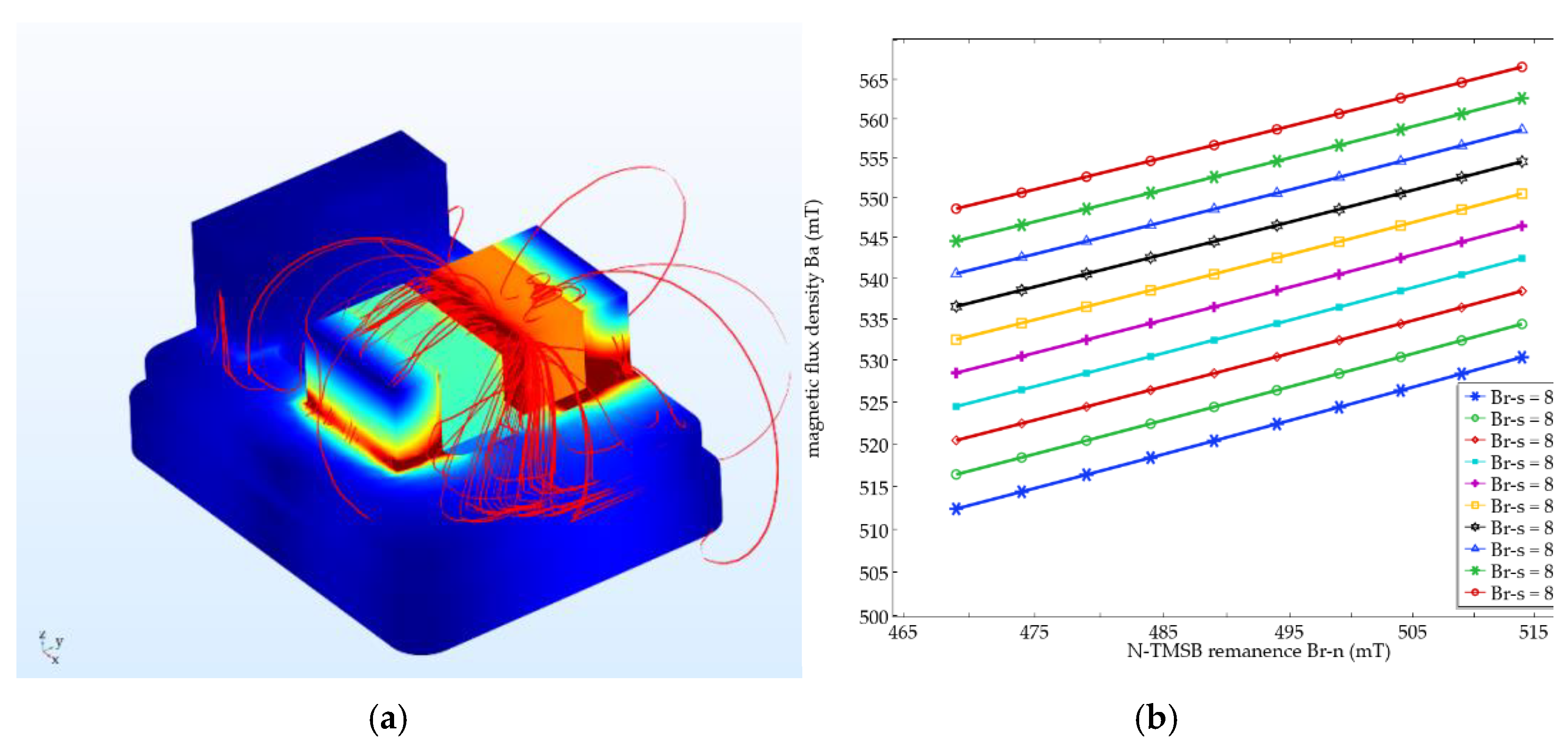
- Magnetostatics modeling. Through FEM simulation, the distribution of magnetic flux density in TMSP is calculated. Then, an equation is built up to describe the influence of magnetic flux densities of s-TMSBs and n-TMSBs (BS and BN) on the air-gap magnetic flux density (Ba).
- Weight calculation. BS and BN are measured firstly. Then, the n-TMSBs and s-TMSBs are numbered as (Si, Nj) respectively for the left vertex and right one of bipartite graph. is calculated by the BSi and BNj, as the weight of edge connected by each vertex.
- Vertex assignment. It means that the maximum edge weight (max []) of all edges connected to each S vertex on the left is assigned to the top mark (LS). Additionally, the top mark (LN) of each N vertex on the right is assigned to zero.
- TMSP matching. The algorithm starts from the vertex S1 on the left to search for the corresponding vertex and augmented path (N vertex). The guideline of matching is to keep only the edges with the same weight and the left top mark LSi, and to meet the requirements of . If one edge is not qualified or the two edges conflict, then LS of all left vertices of the conflict path is subtracted by a top mark adjustment d (d = min [ − ()]), and LN of all right vertices is increased by d. After that, the pairing is performed again, and the augmented path is searched until the maximum matching number (min [i, j]) is reached.
- Result verification. According to the matching result, s-TMSB is actually assembled with n-TMSB to form a TMSP and then Ba is measured to verify it.
2.2. FEM Simulation
3. TMSP Matching Device
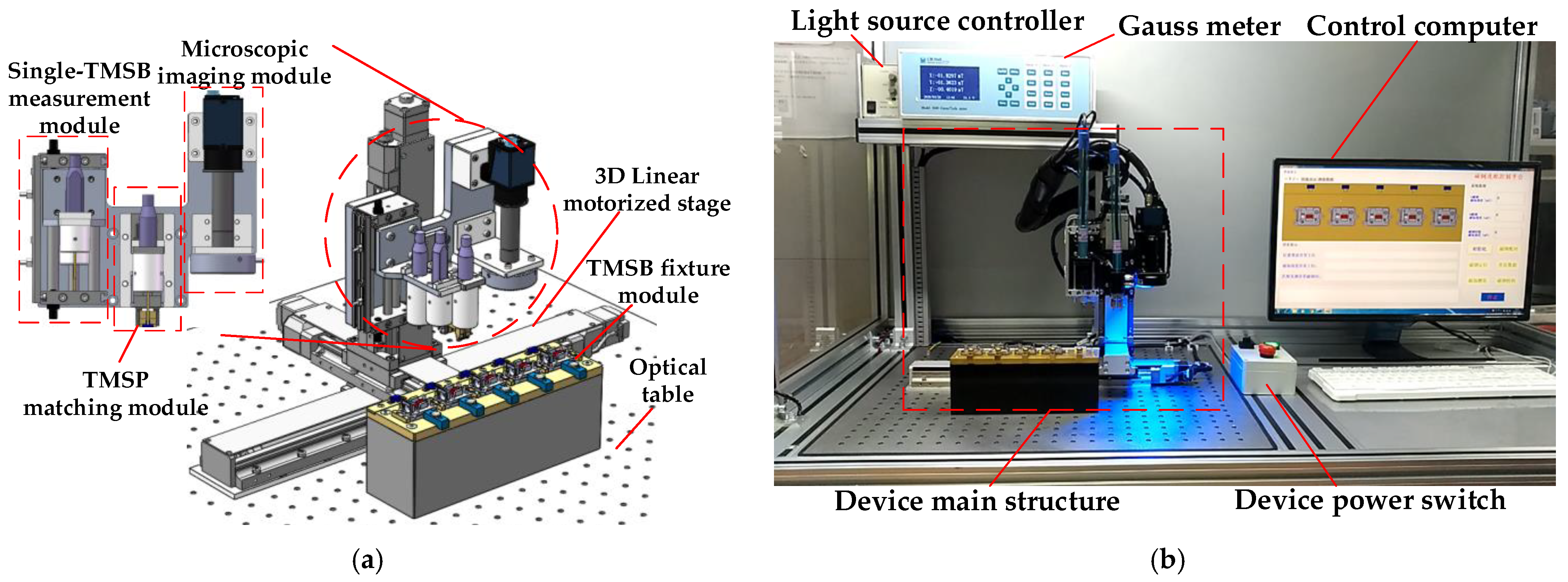
3.1. Device Structure
- The TMSB fixture module is used to fix the magnet bases and s-TMSBs. At present, it is composed of five fixtures. Every s-TMSB is placed in one socket in which the space on its left and right is kept for the TMSB clamp fingers.
- The single-TMSB measurement module consists of two Hall probes (Resolution: 10 nT, range: 30 T), air slide table, and corresponding connecting parts, which are used to measure the magnetic flux density of the n-TMSBs and the s-TMSBs, respectively.
- The microscopic imaging module (1×, CCD resolution: 3840 × 2748, Pixel size: 1.67 μm) is used to measure the size and position of TMSBs and magnet bases.
- The TMSP matching module consists of the TMSB clamp, air gripper, Hall probe, flexible mechanism, micro-force sensor, and connecting parts as shown in Figure 5.
- TMSB size and position measurement. The size and position are measured via the microscopic imaging module. These parts with qualified size will be put into a list.
- TMSB magnetic property measurement and matching prediction. The single-TMSB measurement module is driven to measure the magnetic flux density BS and BN in the list respectively. Then, the above-mentioned matching method is used to predict and give the list of matching result.
- TMSP matching. The TMSP matching module is driven to the top of first s-TMSB in the matching list, and then the clamp is controlled to the position and pick up the s-TMSB. Then, the clamped s-TMSB is moved to the matching position and temporarily fixed on the magnet base. Additionally, of TMSP is measured by the Hall probe in front of the TMSB clamp.
3.2. Control Strategy for TMSB Positioning Task
4. Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Huang, X.; Deng, Z.; Xie, Y.; Li, Z.; Fan, J.; Tu, L. A New Scale Factor Adjustment Method for Magnetic Force Feedback Accelerometer. Sensors 2017, 17, 2471. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xue, W.; Zhu, Z.-g.; Li, S. Design and Simulation of Three-floated Gyroscope Integration Circuits. Comput. Simul. 2012, 29, 108–111. [Google Scholar]
- Fu, W.N.; Chen, Y. A Post-Assembly Magnetization Method for a Line-Start Permanent-Magnet Motor. IEEE Trans. Appl. Supercond. 2016, 26, 1–4. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Kou, K.; Wu, T.; Long, C. Analytical model of magnetic field distribution in the air-gap of quartz flexible accelerometer. Int. J. Appl. Electromagn. Mech. 2016, 50, 367–377. [Google Scholar] [CrossRef]
- Meyer, A.; Mayr, A.; Malygin, N.; Zhang, Y.; Franke, J. Selective Magnet Assembly Assisted by An Automated Warehouse System: Algorithms, Performance and Industry 4.0 Readyness. In Proceedings of the 2017 7th International Electric Drives Production Conference (EDPC), Wuerzburg, Germany, 5–6 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Meyer, A.; Franke, J. Towards an Energy Efficient Series Production of High Performance Permanent Magnet Synchronous Motors by Selective Magnet Assembly. Appl. Mech. Mater. 2018, 882, 111–118. [Google Scholar] [CrossRef]
- Meyer, A.; Heyder, A.; Kühl, A.; Sand, C.; Gehb, H.; Abersfelder, S.; Franke, J.; Holzhey, R.; Büttner, U.; Wangemann, S. Concept for Magnet Intra Logistics and Assembly Supporting the Improvement of Running Characteristics of Permanent Magnet Synchronous Motors. Procedia CIRP 2016, 43, 356–361. [Google Scholar] [CrossRef] [Green Version]
- Arbenz, L.; Chadebec, O.; Espanet, C.; Rtimi, Y.; Cauffet, G. Characterization of permanent magnet magnetization. IEEE Trans. Magn. 2017, 53, 1. [Google Scholar] [CrossRef]
- Franke, J.; Tremel, J.; Kuhl, A. Innovative Developments for Automated Magnet Handling and Bonding of Rare Earth Magnets. In Proceedings of the 2011 IEEE International Symposium on Assembly and Manufacturing (ISAM), Tampere, Finland, 25–27 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–5. [Google Scholar]
- Difonzo, J.C.; Bertoldo, M. Automated System for Magnet Quality Merements. U.S. Patent No. 10,006,974, 28 June 2018. [Google Scholar]
- Cheng, S.; Arnold, D.P. Optimization of Permanent Magnet Assemblies Using Genetic Algorithms. IEEE Trans. Magn. 2011, 47, 4104–4107. [Google Scholar] [CrossRef]
- Peter, M.; Fleischer, J. Optimized Magnet Assembly Algorithms for Reduced Rotor Unbalance: New Rotor Balancing Strategy by Measuring the Weight of Each Magnet and Placing It According to An Algorithm. In Proceedings of the 2015 5th International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 15–16 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Joseph, E.; Tremel, J.; Hofmann, B.; Meyer, A.; Franke, J.; Eschrich, S. Automated Magnet Assembly for Large PM Synchronous Machines with Integrated Permanent Magnets. In Proceedings of the 2013 3rd International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 29–30 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Podol’Skii, A. Development of permanent magnet assembly for MRI devices. IEEE Trans. Magn. 1998, 34, 248–252. [Google Scholar] [CrossRef]
- Roskosz, M.; Bieniek, M. Evaluation of residual stress in ferromagnetic steels based on residual magnetic field measurements. NDT E Int. 2012, 45, 55–62. [Google Scholar] [CrossRef]
- Zheng, K.; Liu, F.; Zheng, Q.; Xiang, W.; Wang, W. A Graph-Based Cooperative Scheduling Scheme for Vehicular Networks. IEEE Trans. Veh. Technol. 2013, 62, 1450–1458. [Google Scholar] [CrossRef] [Green Version]
- Gao, G.; Xiao, M.; Zhao, Z. Optimal Multi-taxi Dispatch for Mobile Taxi-Hailing Systems. In Proceedings of the 2016 45th International Conference on Parallel Processing (ICPP), Philadelphia, PA, USA, 16–19 August 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 294–303. [Google Scholar]
- Beisegel, J.; Denkert, C.; Köhler, E.; Krnc, M.; Pivač, N.; Scheffler, R.; Strehler, M. Recognizing Graph Search Trees. Electron. Notes Theor. Comput. Sci. 2019, 346, 99–110. [Google Scholar] [CrossRef]
- Zeng, Y.; Wu, X.; Cao, J. Analysis and Implementation for the Algorithm Based on Combinatorial Relaxation for Computing the Structure Index of DAE; Springer: Berlin/Heidelberg, Germany, 2012; pp. 277–286. [Google Scholar]
- Lu, Y.; Li, L.; Hu, N.; Pan, Y.; Ren, C. Measurement Method of Magnetic Field for the Wire Suspended Micro-Pendulum Accelerometer. Sensors 2015, 15, 8527–8539. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mizuno, M.; Chetwynd, D.G. Investigation of a resonance microgenerator. J. Micromech. Microeng. 2003, 13, 209–216. [Google Scholar] [CrossRef]
- Sari, I.; Balkan, T.; Kulah, H. An electromagnetic micro power generator for wideband environmental vibrations. Sens. Actuators A Phys. 2008, 145–146, 405–413. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Material | Relative Permeability | Remanence (mT) | L × W × H (mm) |
|---|---|---|---|---|
| s-TMSB | SmCo alloy | 1.03 | 806~896 | 8 × 4 × 4.8 |
| n-TMSB | NdFeB alloy | 1.05 | 469~514 | 8 × 4 × 4.8 (Chamfer) |
| Magnet base | Soft magnetic alloy | 4000 | 0 | - |
| Air | Air | 1 | 0 | (40, 40, 40) |
| Number | BS-1 (mT) | BS-2 (mT) | BN-1 (mT) | BN-2 (mT) |
|---|---|---|---|---|
| 1 | 265.92 | 261.81 | 152.28 | 145.58 |
| 2 | 265.92 | 261.81 | 152.28 | 145.58 |
| 3 | 265.37 | 260.26 | 152.80 | 145.37 |
| 4 | 265.92 | 261.81 | 152.28 | 145.58 |
| 5 | 265.37 | 260.26 | 152.80 | 145.37 |
| Standard deviation | 0.2694 | 0.7593 | 0.2547 | 0.1029 |
| Group | Number | BS (mT) | BN (mT) | Method Prediction Result (mT) | Actual Measurement Result (mT) | (mT) |
|---|---|---|---|---|---|---|
| 1 | 1 | 265.37 | 162.13 | (S1, N5, 546.67) (S2, N3, 525.55) (S3, N2, 537.83) (S4, N1, 525.70) | (S1, N5, 537.67) (S2, N3, 515.56) (S3, N2, 536.83) (S4, N1, 524.66) | 528.69 |
| 2 | 251.02 | 152.8 | ||||
| 3 | 260.26 | 157.94 | ||||
| 4 | 249.48 | 145.37 | ||||
| 5 | −213.78 | 153.14 | ||||
| 2 | 1 | 264.59 | 142.45 | (S1, N5, 502.67) | (S1, N5, 520.91) | 527.55 |
| 2 | 252.25 | 146.37 | (S2, N4, 516.18) | (S2, N4, 524.84) | ||
| 3 | 266.17 | 153.97 | (S3, N3, 525.34) | (S3, N3, 528.47) | ||
| 4 | 251.21 | 148.39 | (S4, N2, 512.73) | (S4, N2, 538.69) | ||
| 5 | 262.68 | 152.64 | (S5, N1, 506.75) | (S5, N1, 524.84) | ||
| 3 | 1 | 231.09 | 156.34 | (S1, N4, 492.97) | (S1, N4, 514.76) | 524.8 |
| 2 | 234.37 | 145.95 | (S2, N5, 492.82) | (S2, N5, 504.09) | ||
| 3 | 256.90 | 150.65 | (S3, N3, 530.77) | (S3, N3, 542.70) | ||
| 4 | 245.61 | 159.55 | (S4, N2, 508.69) | (S4, N2, 526.49) | ||
| 5 | 253.95 | 150.76 | (S5, N1, 529.46) | (S5, N1, 531.96) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Yuan, G.-z.; Wang, X.-d.; Quan, X.-s.; Ren, T.-q.; Liu, J.-s. Kuhn–Munkres Algorithm-Based Matching Method and Automatic Device for Tiny Magnetic Steel Pair. Micromachines 2021, 12, 316. https://doi.org/10.3390/mi12030316
Xu Z, Yuan G-z, Wang X-d, Quan X-s, Ren T-q, Liu J-s. Kuhn–Munkres Algorithm-Based Matching Method and Automatic Device for Tiny Magnetic Steel Pair. Micromachines. 2021; 12(3):316. https://doi.org/10.3390/mi12030316
Chicago/Turabian StyleXu, Zheng, Guo-zhao Yuan, Xiao-dong Wang, Xian-shuai Quan, Tong-qun Ren, and Jun-shan Liu. 2021. "Kuhn–Munkres Algorithm-Based Matching Method and Automatic Device for Tiny Magnetic Steel Pair" Micromachines 12, no. 3: 316. https://doi.org/10.3390/mi12030316
APA StyleXu, Z., Yuan, G. -z., Wang, X. -d., Quan, X. -s., Ren, T. -q., & Liu, J. -s. (2021). Kuhn–Munkres Algorithm-Based Matching Method and Automatic Device for Tiny Magnetic Steel Pair. Micromachines, 12(3), 316. https://doi.org/10.3390/mi12030316