
A Magnetically Actuated Superhydrophobic Ratchet Surface for Droplet Manipulation




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
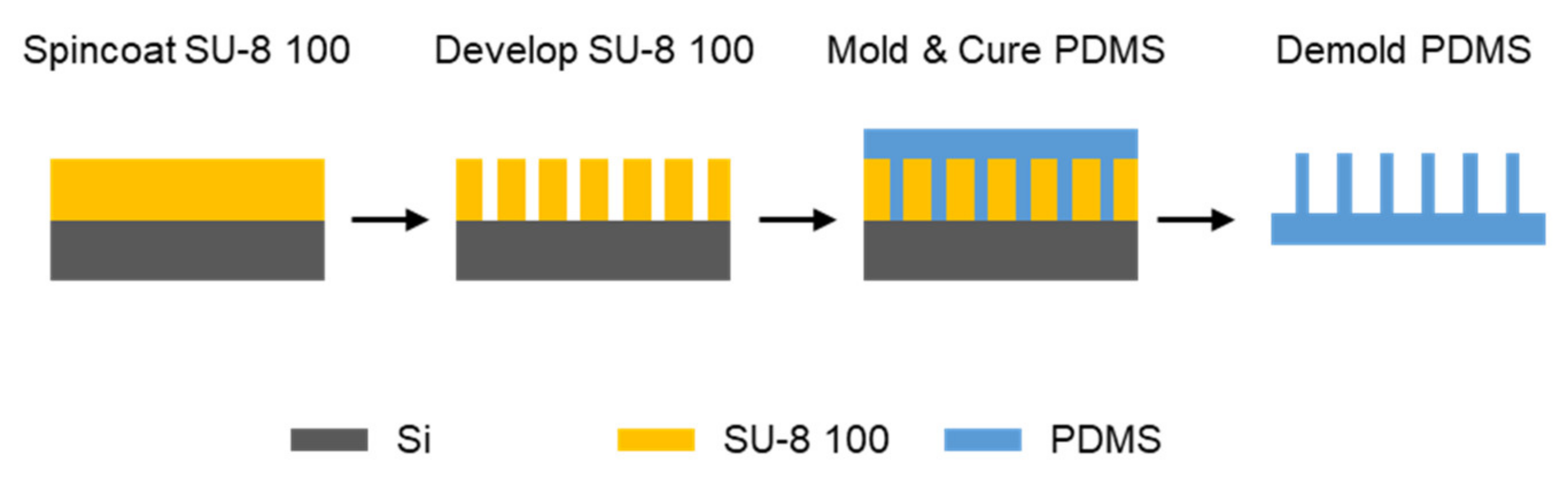
2.1. Fabrication of an Elastomer Ridge Array
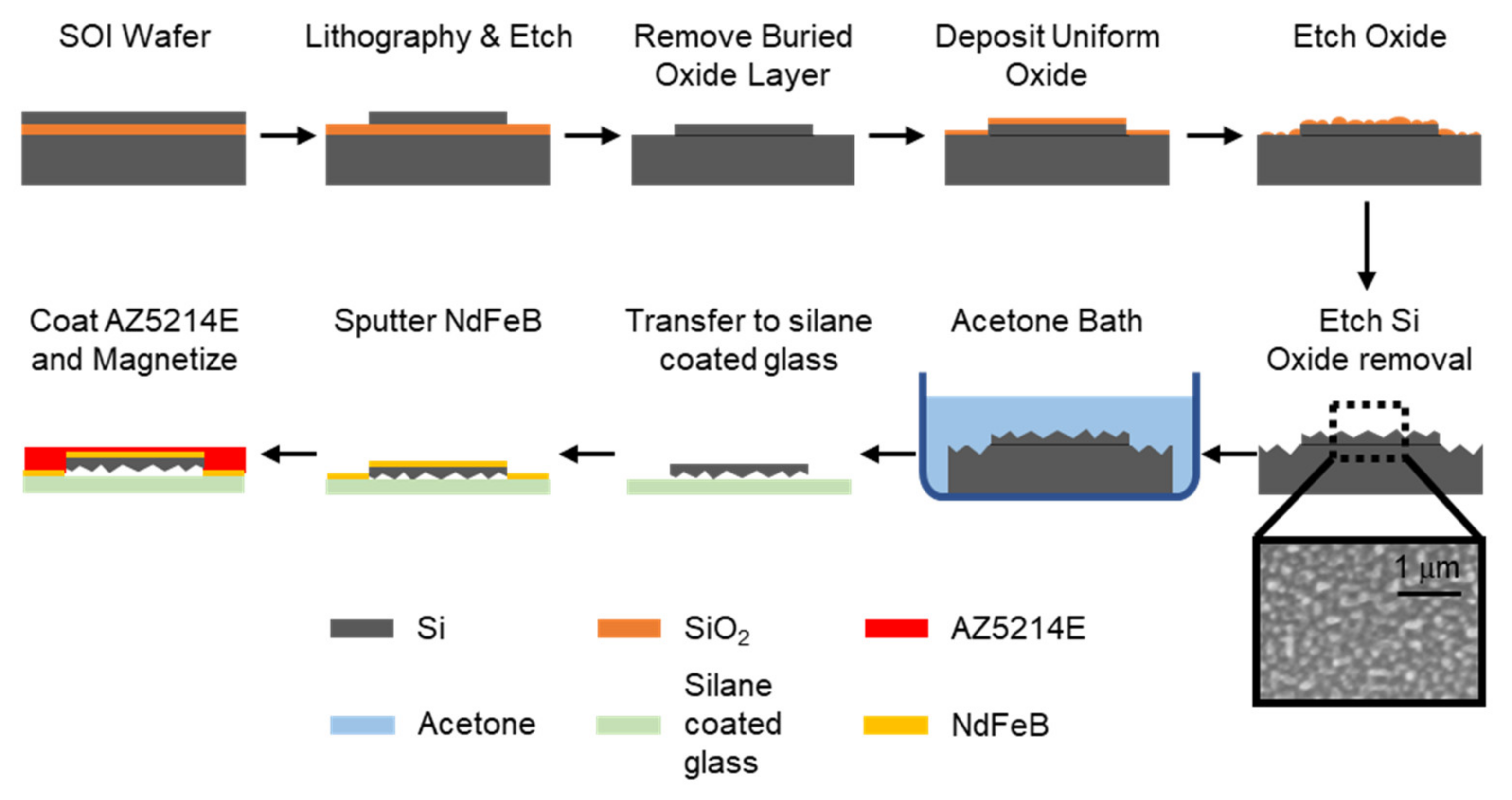
2.2. Fabrication of Nanostructured Black Silicon Strips
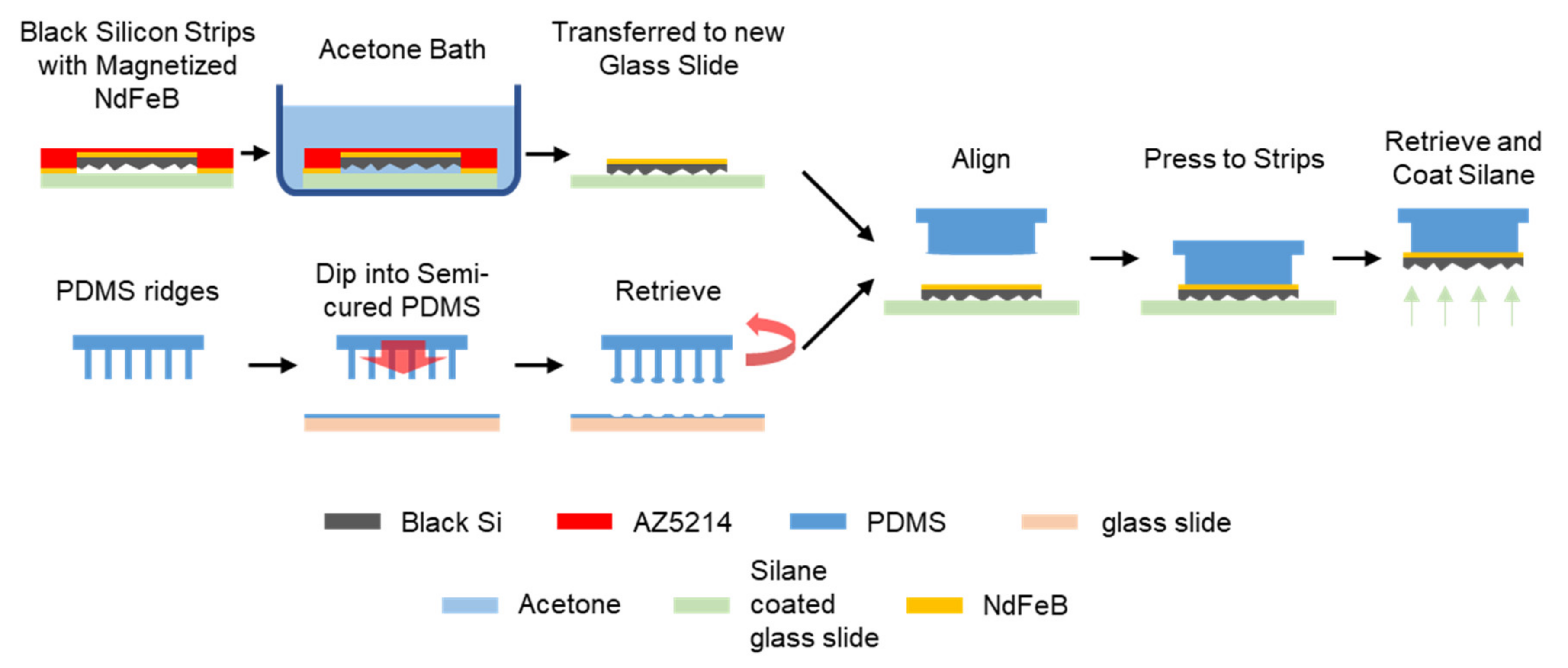
2.3. Transferring Black Silicon Strips and Sputtering a Magnetic Material
2.4. Transfer Printing of Black Silicon Magnetic Strips on Elastomer Ridges
2.5. High-Speed Camera Capturing
3. Results and Discussion
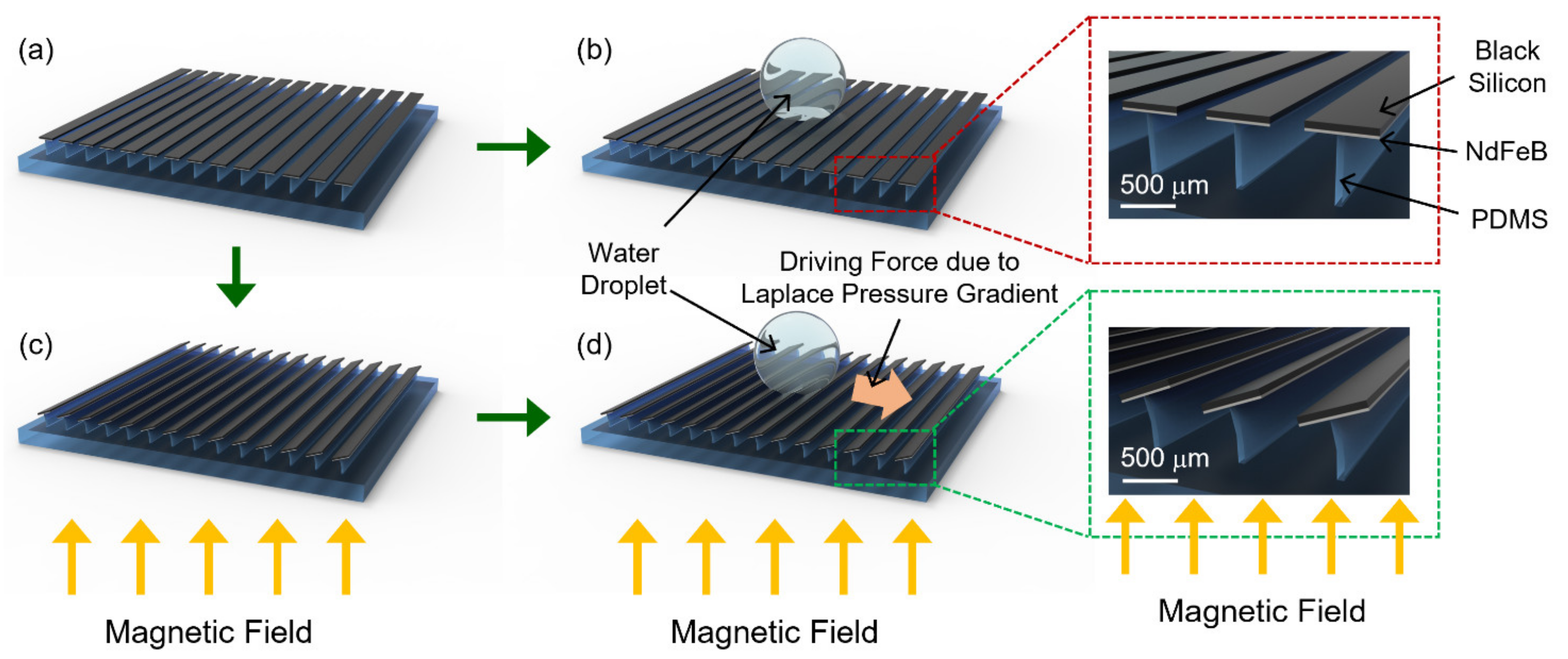
3.1. Characterization of Magnetomechanical Properties
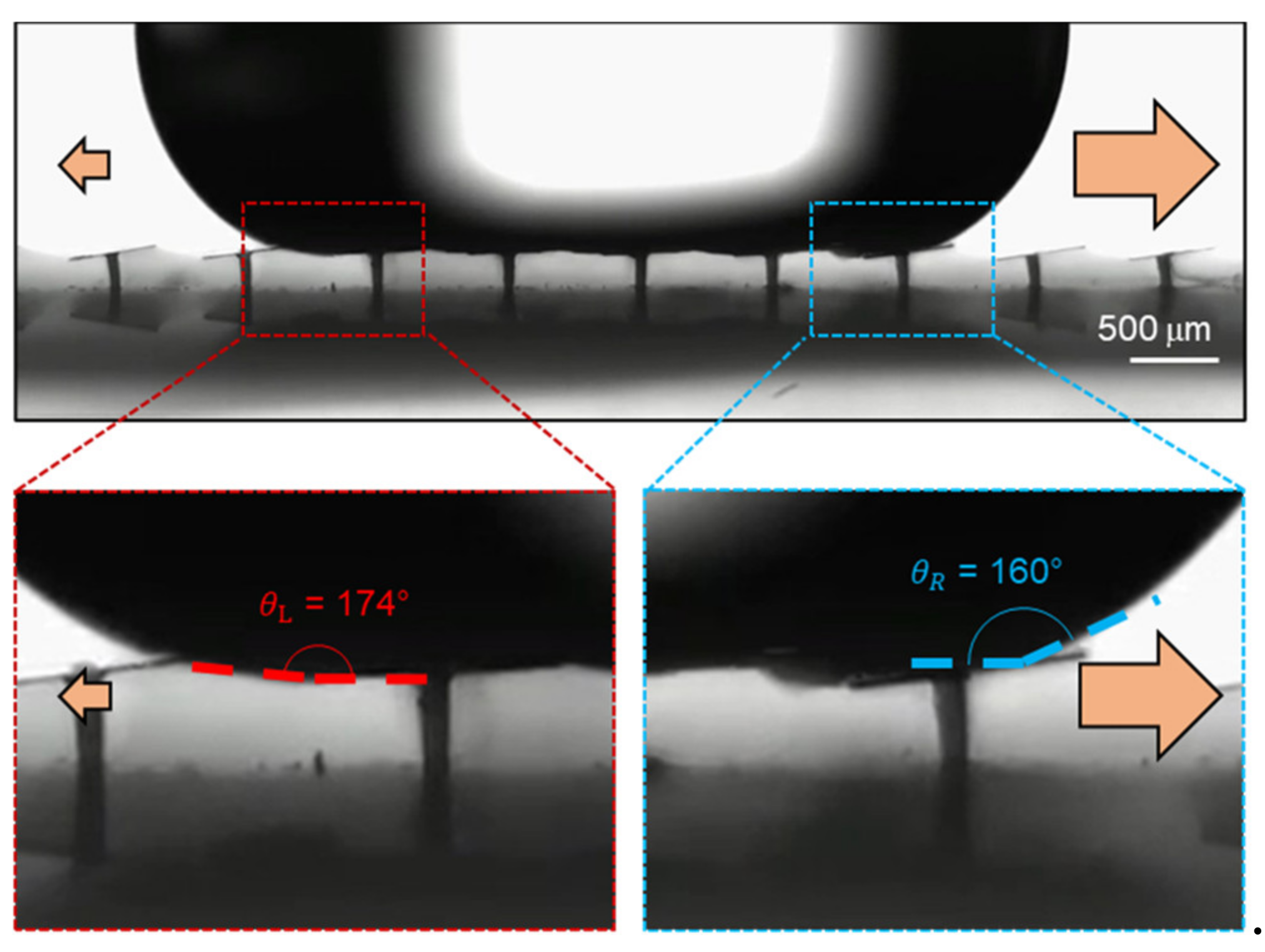
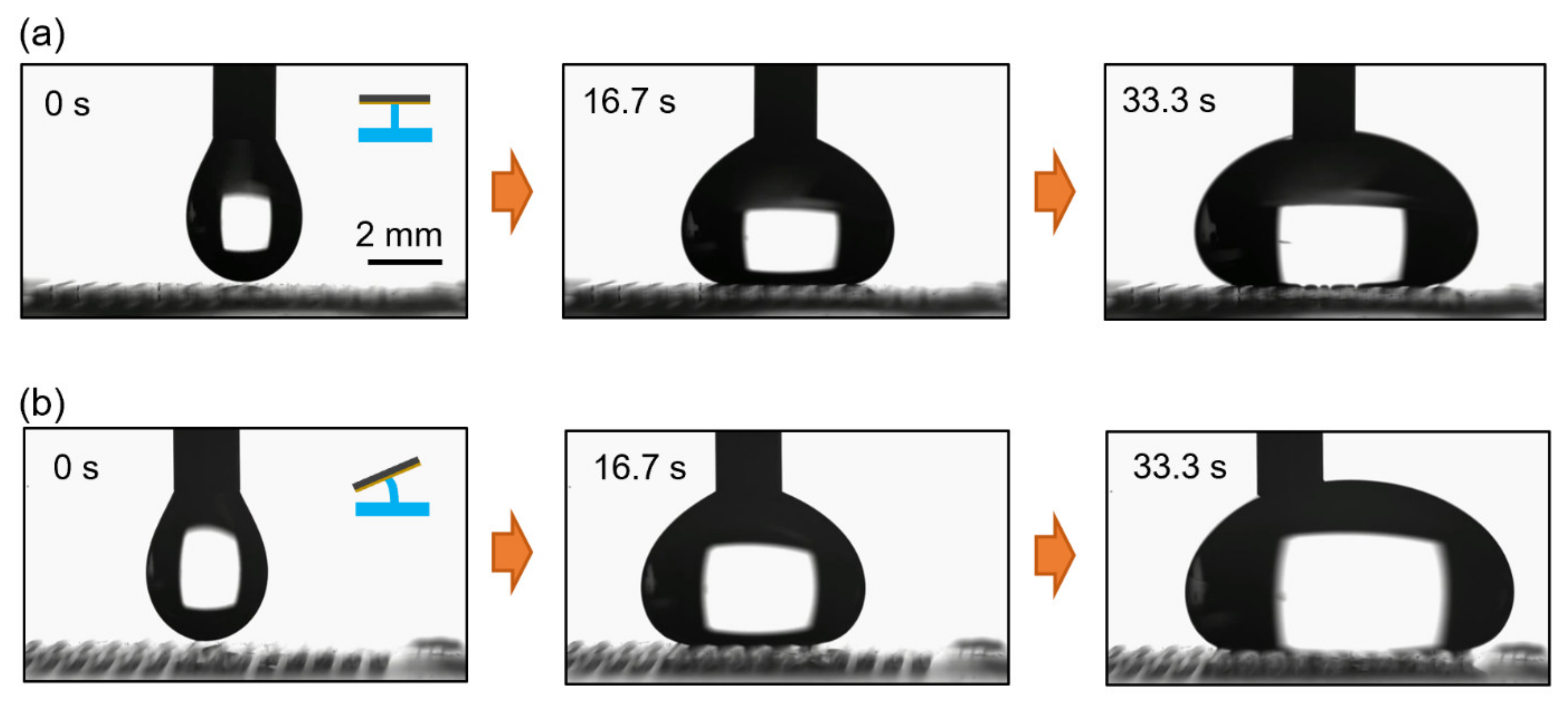
3.2. Droplet Spreading Behavior
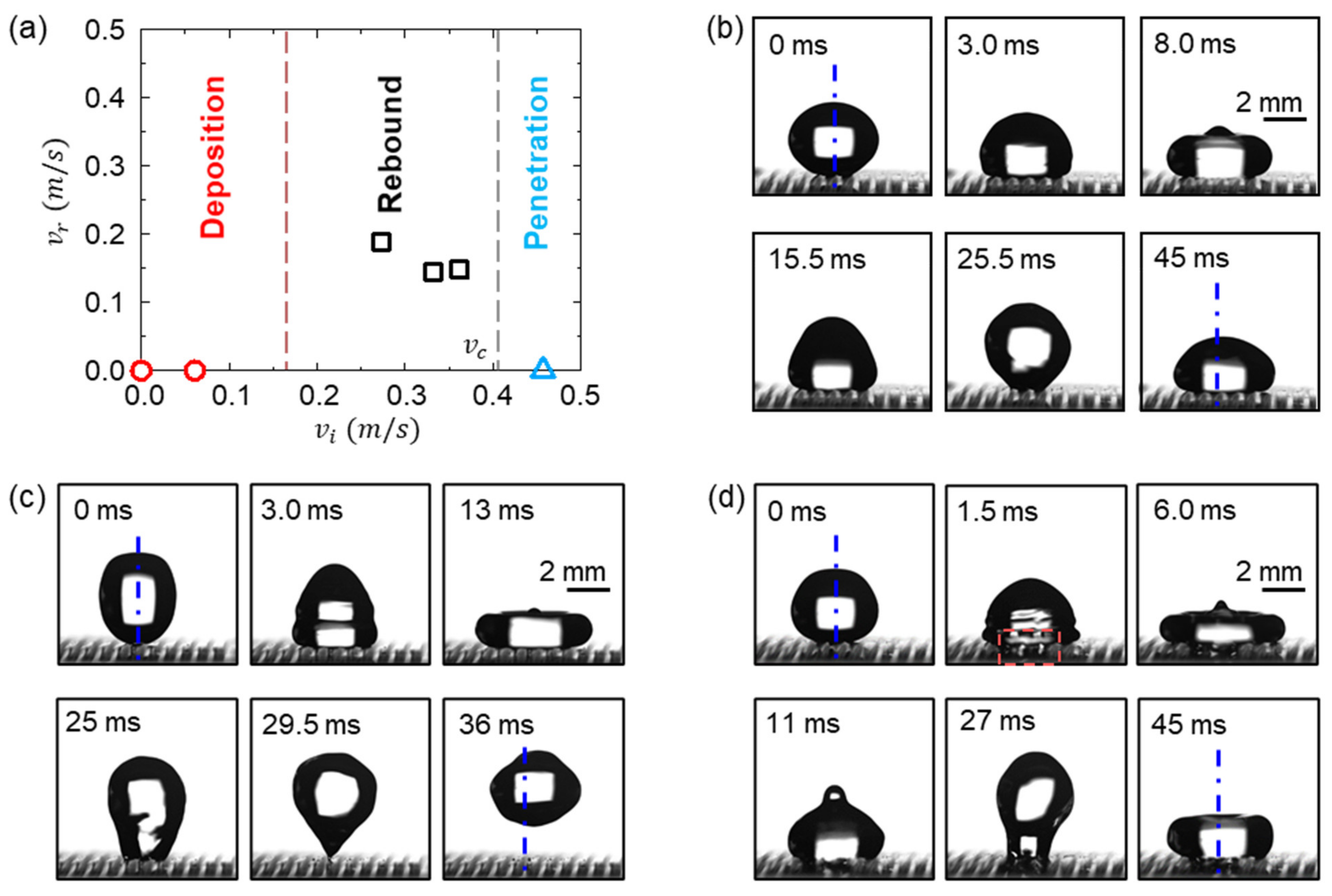
3.3. Droplet Impact Behavior
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sun, D.; Böhringer, K.F. An Active Self-Cleaning Surface System for Photovoltaic Modules Using Anisotropic Ratchet Conveyors and Mechanical Vibration. Microsyst. Nanoeng. 2020, 6. [Google Scholar] [CrossRef]
- Sun, D.; Böhringer, K.F. Self-Cleaning: From Bio-Inspired Surface Modification to MEMS/Microfluidics System Integration. Micromachines 2019, 10, 101. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.L.C.; Sapiha, K.; Leong, Y.F.H.; Choi, S.; Anariba, F.; Thio, B.J.R. Lotus-like Effect for Metal Filings Recovery and Particle Removal on Heated Metal Surfaces Using Leidenfrost Water Droplets. Soft Matter 2015, 11, 5400–5407. [Google Scholar] [CrossRef] [PubMed]
- Nightingale, A.M.; Phillips, T.W.; Bannock, J.H.; De Mello, J.C. Controlled Multistep Synthesis in a Three-Phase Droplet Reactor. Nat. Commun. 2014, 5, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Bawazer, L.A.; McNally, C.S.; Empson, C.J.; Marchant, W.J.; Comyn, T.P.; Niu, X.; Cho, S.; Mcpherson, M.J.; Binks, B.P.; Demello, A.; et al. Combinatorial Microfluidic Droplet Engineering for Biomimetic Material Synthesis. Sci. Adv. 2016, 2, e1600567. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wang, T.H. Full-Range Magnetic Manipulation of Droplets via Surface Energy Traps Enables Complex Bioassays. Adv. Mater. 2013, 25, 2903–2908. [Google Scholar] [CrossRef] [PubMed]
- Su, F.; Ozev, S.; Chakrabarty, K. Ensuring the Operational Health of Droplet-Based Microelectrofluidic Biosensor Systems. IEEE Sens. J. 2005, 5, 763–772. [Google Scholar] [CrossRef]
- Regan, D.P.; Howell, C. Droplet Manipulation with Bioinspired Liquid-Infused Surfaces: A Review of Recent Progress and Potential for Integrated Detection. Curr. Opin. Colloid Interface Sci. 2019, 39, 137–147. [Google Scholar] [CrossRef]
- Cho, S.K.; Moon, H.; Kim, C.J. Creating, Transporting, Cutting, and Merging Liquid Droplets by Electrowetting-Based Actuation for Digital Microfluidic Circuits. J. Microelectromech. Syst. 2003, 12, 70–80. [Google Scholar] [CrossRef] [Green Version]
- Li, A.; Li, H.; Li, Z.; Zhao, Z.; Li, K.; Li, M.; Song, Y. Programmable Droplet Manipulation by a Magnetic-Actuated Robot. Sci. Adv. 2020, 6, eaay5808. [Google Scholar] [CrossRef] [Green Version]
- Linke, H.; Alemán, B.J.; Melling, L.D.; Taormina, M.J.; Francis, M.J.; Dow-Hygelund, C.C.; Narayanan, V.; Taylor, R.P.; Stout, A. Self-Propelled Leidenfrost Droplets. Phys. Rev. Lett. 2006, 96, 154502. [Google Scholar] [CrossRef] [Green Version]
- Ok, J.T.; Lopez-Oña, E.; Nikitopoulos, D.E.; Wong, H.; Park, S. Propulsion of Droplets on Micro- and Sub-Micron Ratchet Surfaces in the Leidenfrost Temperature Regime. Microfluid. Nanofluid. 2011, 10, 1045–1054. [Google Scholar] [CrossRef]
- Agapov, R.L.; Boreyko, J.B.; Briggs, D.P.; Srijanto, B.R.; Retterer, S.T.; Collier, C.P.; Lavrik, N.V. Length Scale of Leidenfrost Ratchet Switches Droplet Directionality. Nanoscale 2014, 6, 9293–9299. [Google Scholar] [CrossRef] [PubMed]
- Jia, Z.; Chen, M.; Zhu, H. Reversible Self-Propelled Leidenfrost Droplets on Ratchet Surfaces. Appl. Phys. Lett. 2017, 110, 091603. [Google Scholar] [CrossRef]
- Li, J.; Zhou, X.; Zhang, Y.; Hao, C.; Zhao, F.; Li, M.; Tang, H.; Ye, W.; Wang, Z. Rectification of Mobile Leidenfrost Droplets by Planar Ratchets. Small 2020, 16, 1901751. [Google Scholar] [CrossRef] [PubMed]
- Duncombe, T.A.; Erdem, E.Y.; Shastry, A.; Baskaran, R.; Böhringer, K.F. Controlling Liquid Drops with Texture Ratchets. Adv. Mater. 2012, 24, 1545–1550. [Google Scholar] [CrossRef] [PubMed]
- Sekeroglu, K.; Gurkan, U.A.; Demirci, U.; Demirel, M.C. Transport of a Soft Cargo on a Nanoscale Ratchet. Appl. Phys. Lett. 2011, 99, 063703. [Google Scholar] [CrossRef] [Green Version]
- Sun, D.; Gomez, G.; Bohringer, K.F. Droplet Manipulation Using AC Ewod-Actuated Anisotropic Ratchet Conveyor. In Proceedings of the 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems and Eurosensors XXXIII, TRANSDUCERS 2019 and EUROSENSORS XXXIII, Berlin, Germany, 23–27 June 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 2270–2273. [Google Scholar]
- Yang, Z.; Park, J.K.; Kim, S. Magnetically Responsive Elastomer-Silicon Hybrid Surfaces for Fluid and Light Manipulation. Small 2018, 14, 1702839. [Google Scholar] [CrossRef] [PubMed]
- Park, J.K.; Kim, S. Droplet Manipulation on a Structured Shape Memory Polymer Surface. Lab Chip 2017, 17, 1793–1801. [Google Scholar] [CrossRef] [Green Version]
- Camacho, J.M.; Sosa, V. Alternative Method to Calculate the Magnetic Field of Permanent Magnets with Azimuthal Symmetry. Educ. Rev. Mex. Física E 2013, 59, 8–17. [Google Scholar]
- Bai, H.; Tian, X.; Zheng, Y.; Ju, J.; Zhao, Y.; Jiang, L. Direction Controlled Driving of Tiny Water Drops on Bioinspired Artificial Spider Silks. Adv. Mater. 2010, 22, 5521–5525. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.T.; Chen, J.C.; Huang, K.J.; Yeh, J.A. Droplet Manipulation on a Hydrophobic Textured Surface with Roughened Patterns. J. Microelectromech. Syst. 2006, 15, 697–707. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, Z.; Zhang, C.; Yang, C. Reduced Contact Time of a Droplet Impacting on a Moving Superhydrophobic Surface. Appl. Phys. Lett. 2020, 117, 151602. [Google Scholar] [CrossRef]
- Antonini, C.; Amirfazli, A.; Marengo, M. Drop Impact and Wettability: From Hydrophilic to Superhydrophobic Surfaces. Phys. Fluids 2012, 24, 102104. [Google Scholar] [CrossRef]
- Tsai, P.; Pacheco, S.; Pirat, C.; Lefferts, L.; Lohse, D. Drop Impact upon Micro- and Nanostructured Superhydrophobic Surfaces. Langmuir 2009, 25, 12293–12298. [Google Scholar] [CrossRef] [Green Version]
- Qu, J.; Yang, Y.; Yang, S.; Hu, D.; Qiu, H. Droplet Impingement on Nano-Textured Superhydrophobic Surface: Experimental and Numerical Study. Appl. Surf. Sci. 2019, 491, 160–170. [Google Scholar] [CrossRef]
- Yuan, Z.; Wen, J.; Matsumoto, M.; Kurose, R. Anti-Wetting Ability of the Hydrophobic Surface Decorated by Submillimeter Grooves. Int. J. Multiph. Flow 2020, 131, 103404. [Google Scholar] [CrossRef]
- Kumar, M.; Bhardwaj, R.; Sahu, K.C. Motion of a Droplet on an Anisotropic Microgrooved Surface. Langmuir 2019, 35, 2957–2965. [Google Scholar] [CrossRef]
- Hee Kwon, D.; Joon Lee, S. Impact and Wetting Behaviors of Impinging Microdroplets on Superhydrophobic Textured Surfaces. Appl. Phys. Lett. 2012, 100, 171601. [Google Scholar] [CrossRef]
- Yuan, Z.; Matsumoto, M.; Kurose, R. Directional Migration of an Impinging Droplet on a Surface with Wettability Difference. Phys. Rev. Fluids 2020, 5, 113605. [Google Scholar] [CrossRef]
- Deng, T.; Varanasi, K.K.; Hsu, M.; Bhate, N.; Keimel, C.; Stein, J.; Blohm, M. Nonwetting of Impinging Droplets on Textured Surfaces. Appl. Phys. Lett. 2009, 94, 133109. [Google Scholar] [CrossRef] [Green Version]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, C.; Ji, B.; Park, J.; Feng, J.; Kim, S. A Magnetically Actuated Superhydrophobic Ratchet Surface for Droplet Manipulation. Micromachines 2021, 12, 325. https://doi.org/10.3390/mi12030325
Son C, Ji B, Park J, Feng J, Kim S. A Magnetically Actuated Superhydrophobic Ratchet Surface for Droplet Manipulation. Micromachines. 2021; 12(3):325. https://doi.org/10.3390/mi12030325
Chicago/Turabian StyleSon, ChangHee, BingQiang Ji, JunKyu Park, Jie Feng, and Seok Kim. 2021. "A Magnetically Actuated Superhydrophobic Ratchet Surface for Droplet Manipulation" Micromachines 12, no. 3: 325. https://doi.org/10.3390/mi12030325
APA StyleSon, C., Ji, B., Park, J., Feng, J., & Kim, S. (2021). A Magnetically Actuated Superhydrophobic Ratchet Surface for Droplet Manipulation. Micromachines, 12(3), 325. https://doi.org/10.3390/mi12030325