
Autonomous Spiral Motion by a Small-Type Robot on an Obstacle-Available Surface

Abstract
:1. Introduction
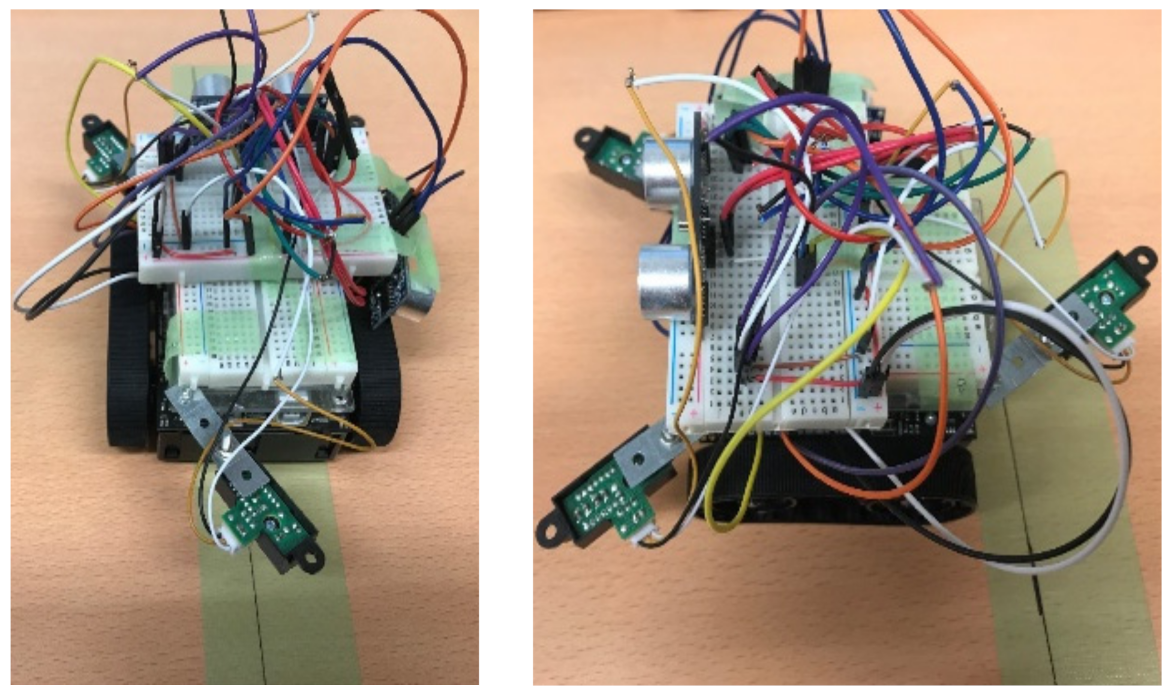
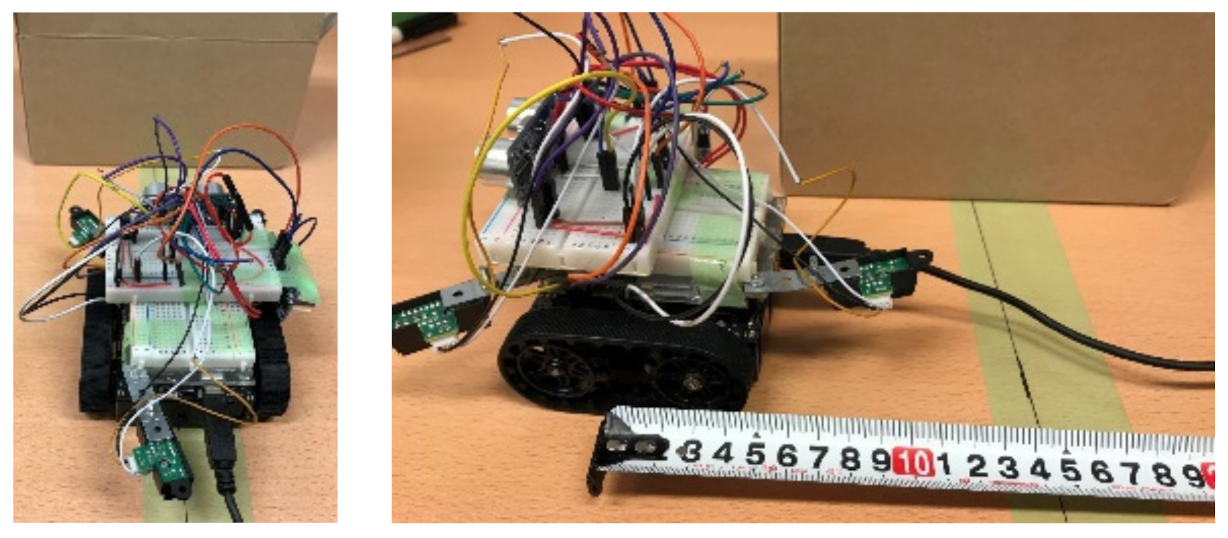
2. Hardware of Developed Robot
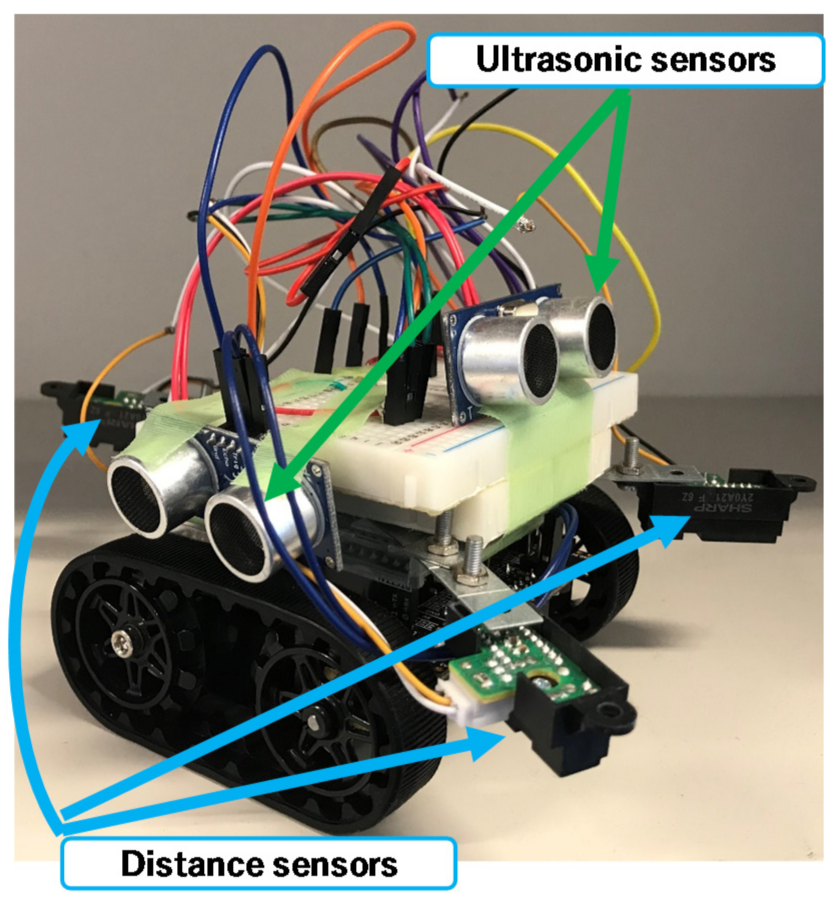
2.1. Hardware Installed on the Robot
2.2. Hardware Roles
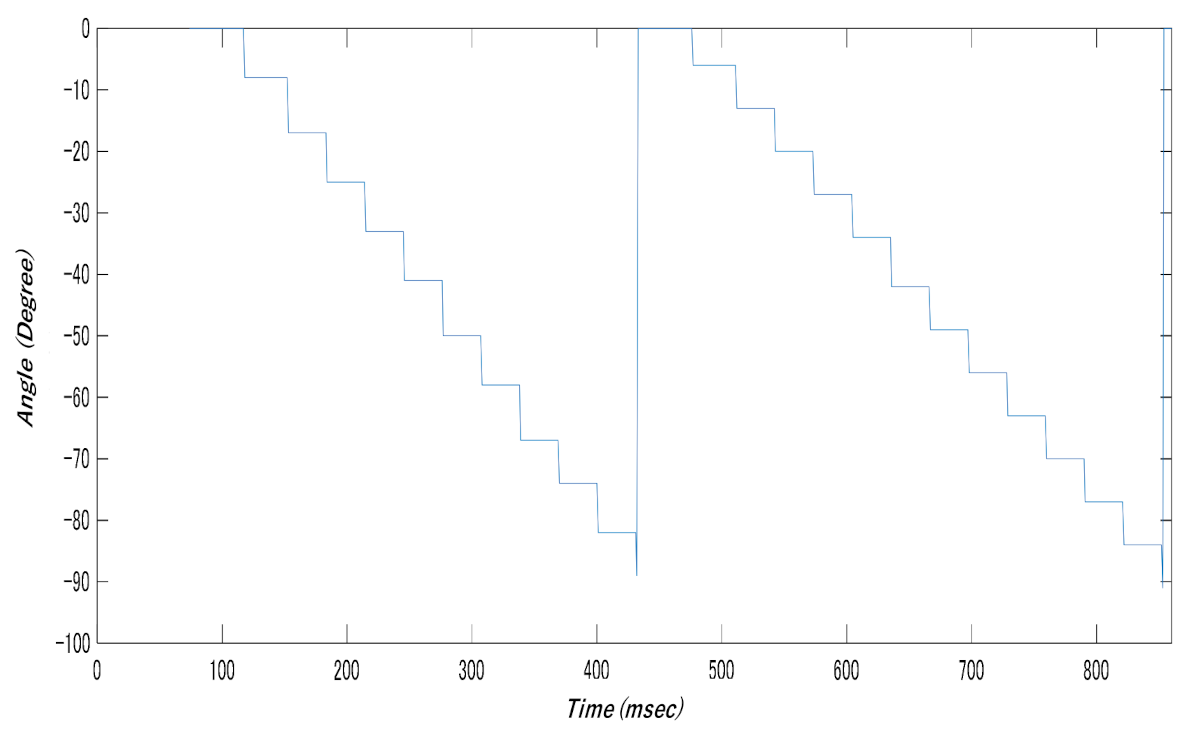
3. Robot Attitude Control
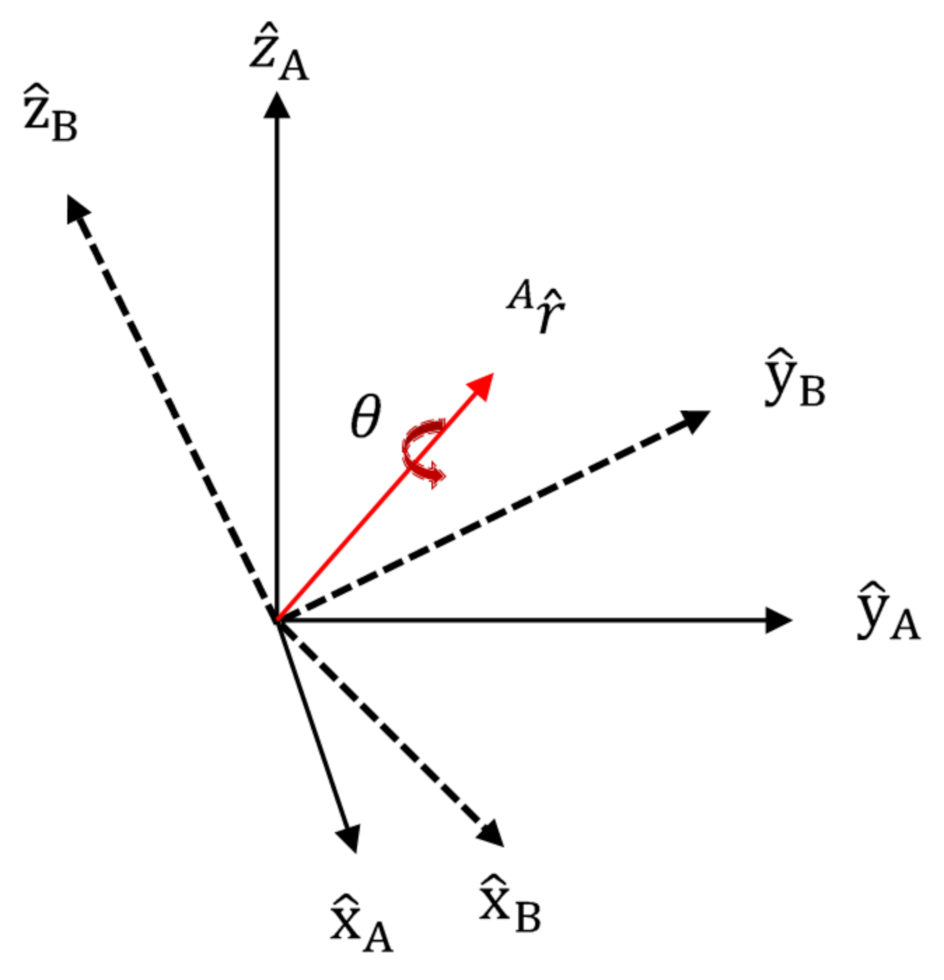
3.1. Control Using AHRS
3.2. Angle Detection by Each Sensor
- (1)
- Gyroscope sensor
- (2)
- Acceleration sensor
- (3)
- Magnetic field sensor
3.3. Estimation of Current Angle
- (1)
- Slight change in acceleration
- (2)
- Substantial change in acceleration
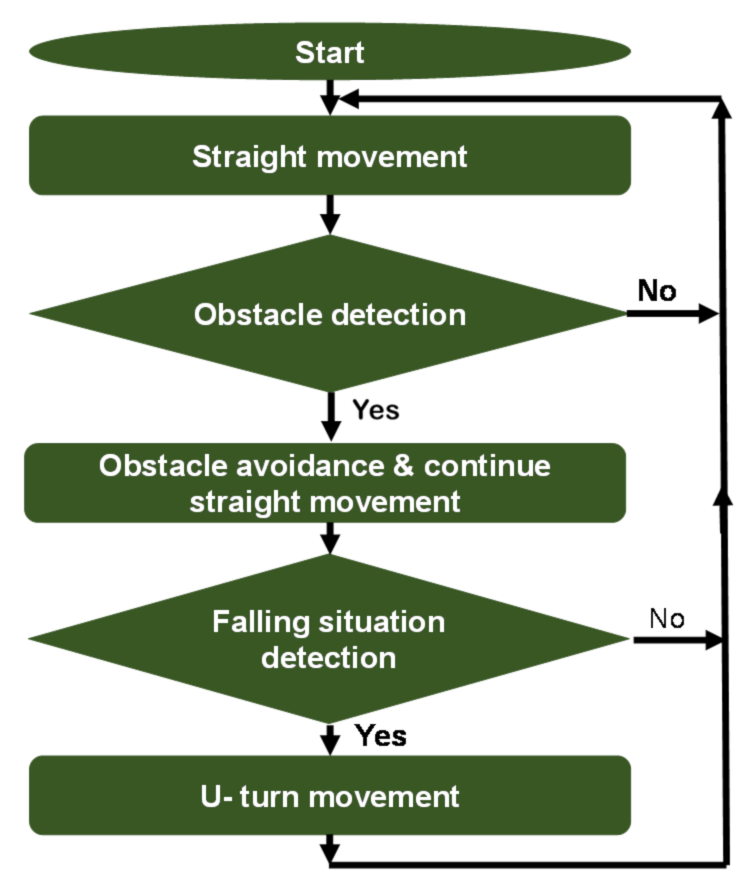
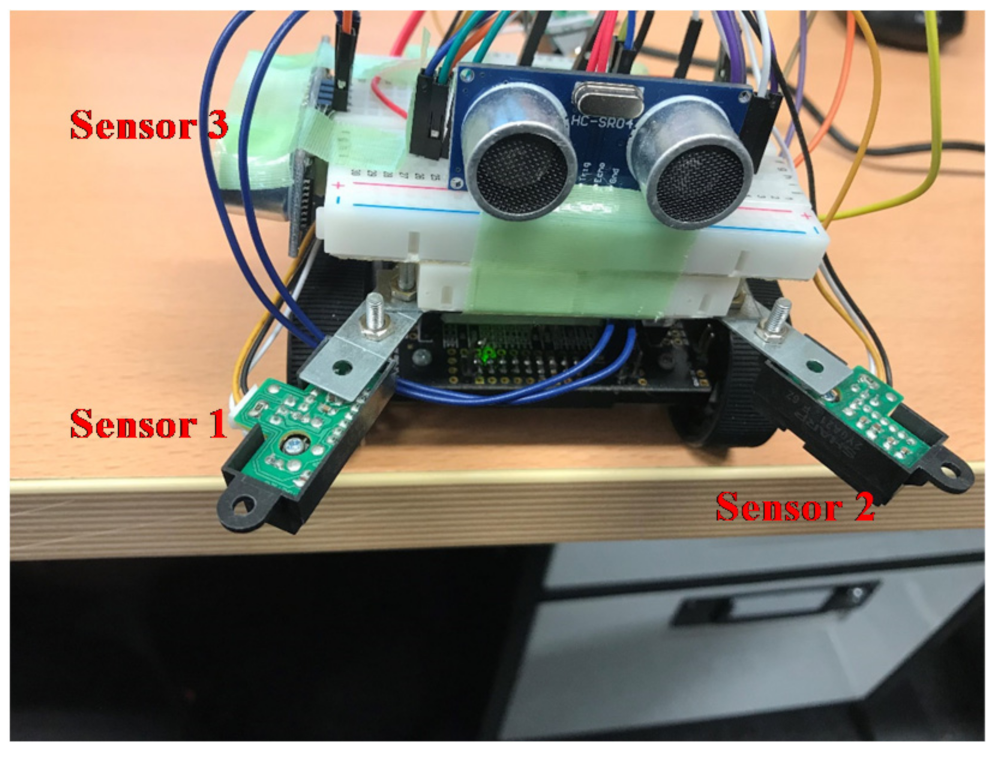
4. Fall Prevention and Obstacle Avoidance
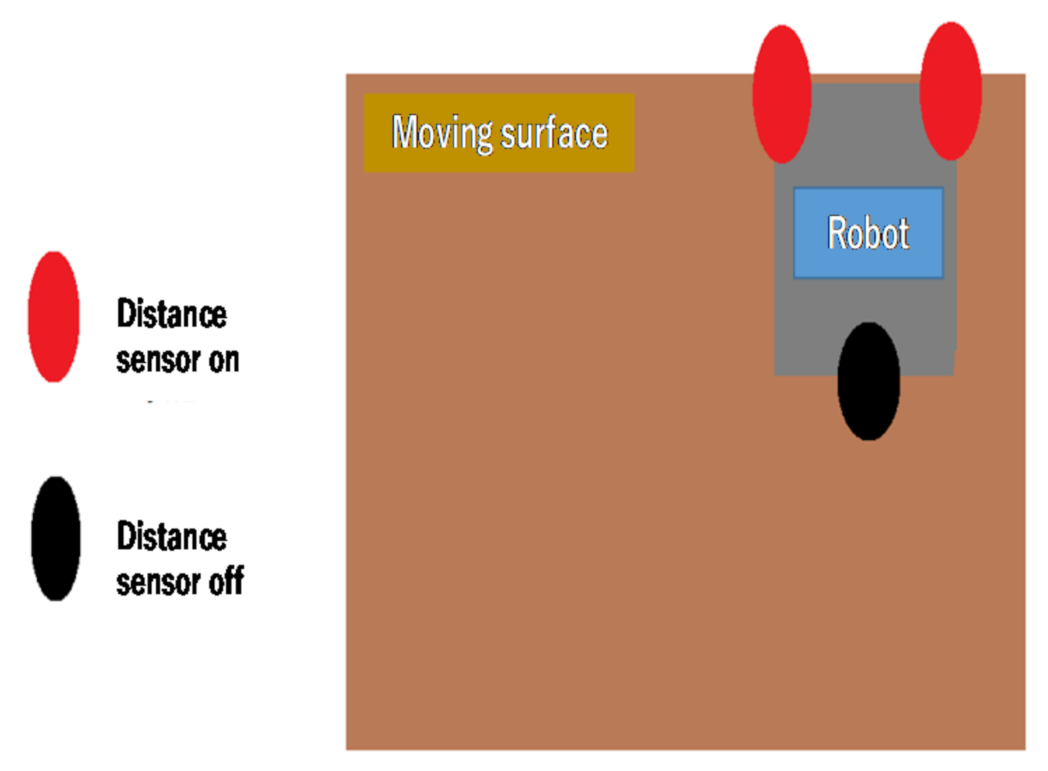
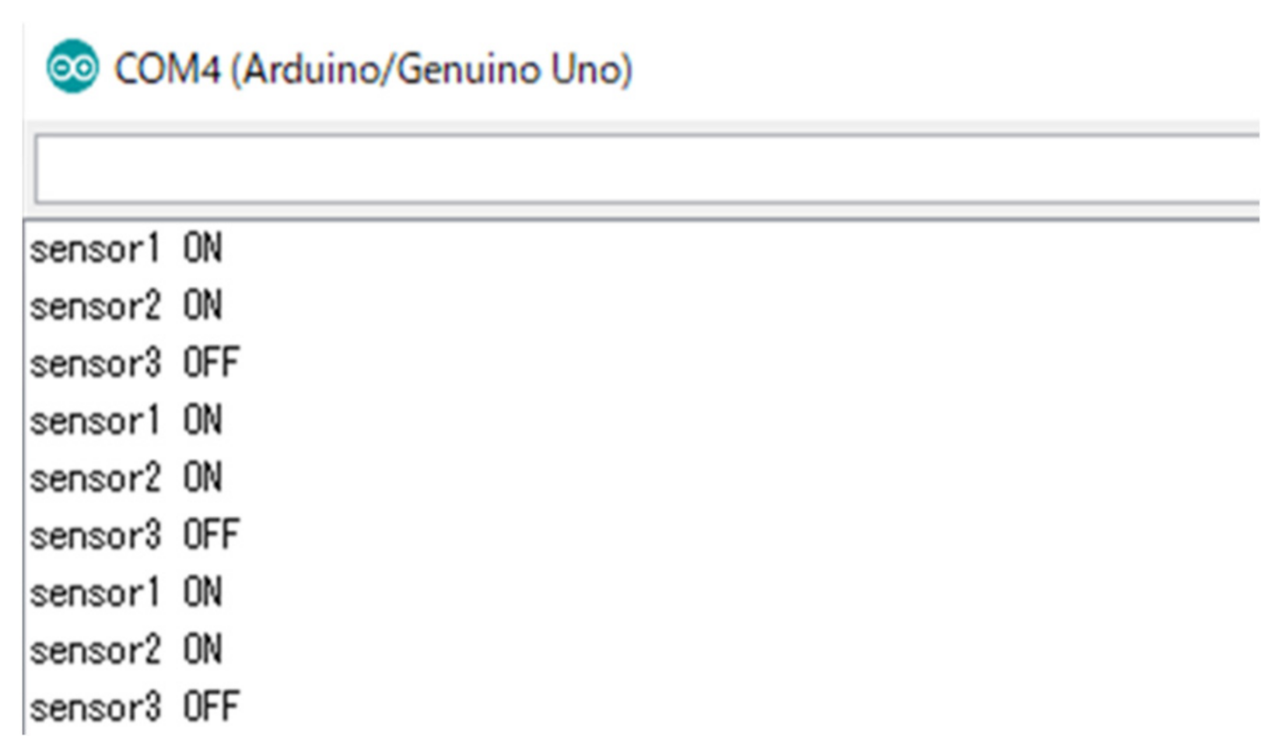
4.1. Fall Prevention
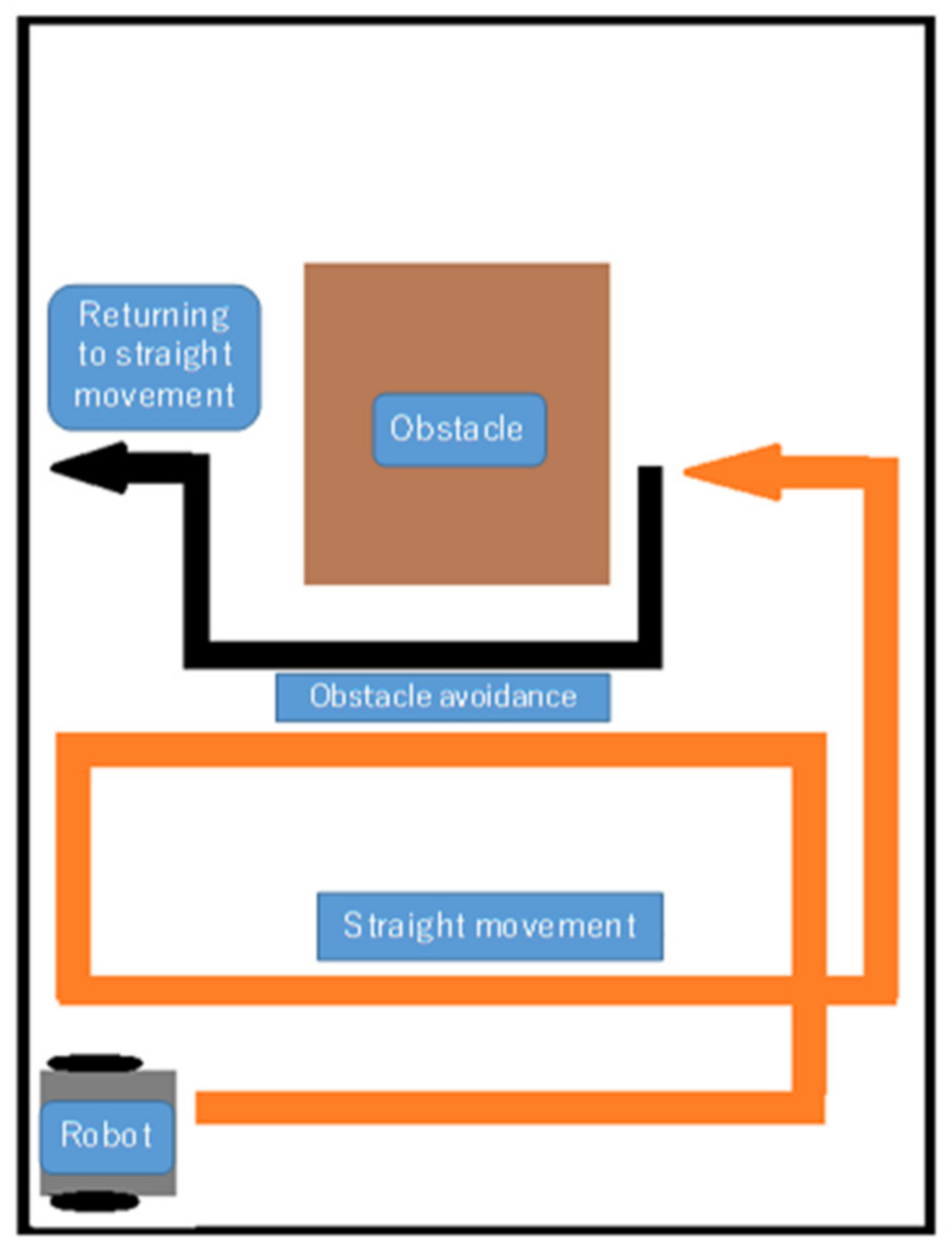
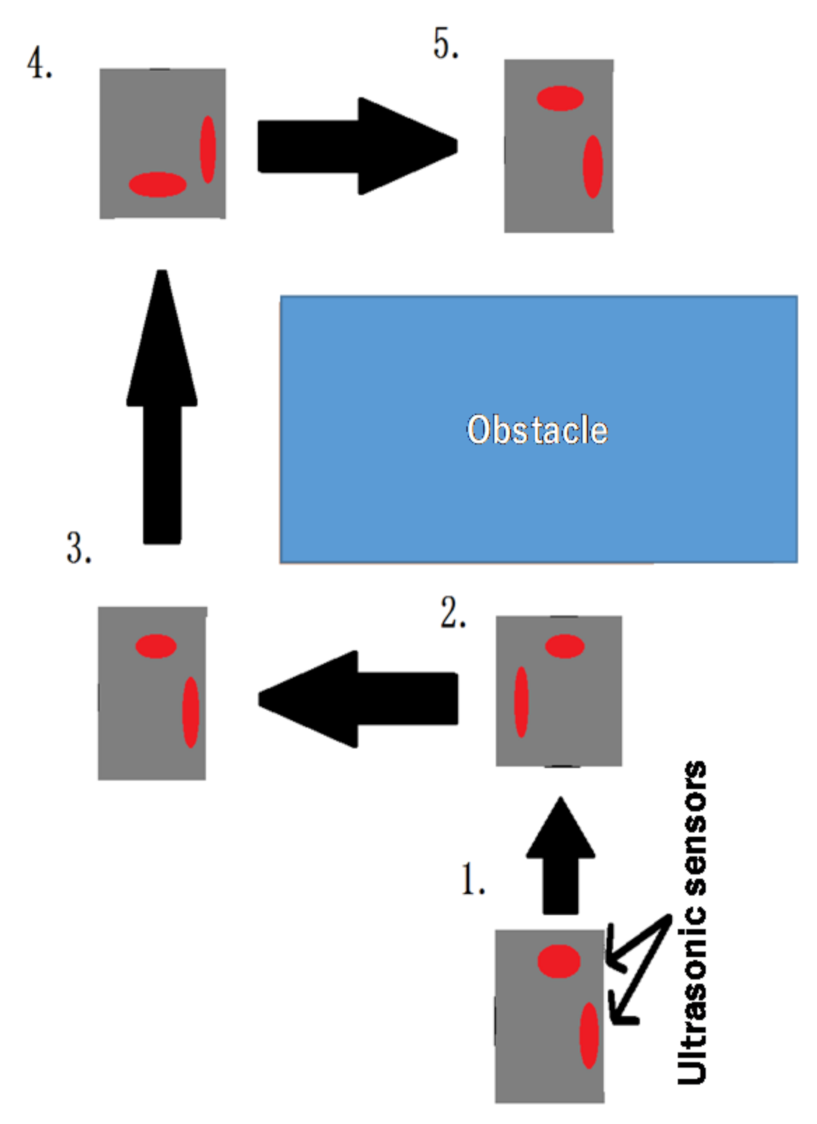
4.2. Obstacle Avoidance and Subsequent Return to Regular Travel
- The front sonic ultrasonic sensor detects an obstacle.
- The robot performs a 90° left turn, switches on the ultrasonic sensor on the right side, and moves straight ahead until the right-hand ultrasonic sensor exceeds the threshold. Then, the time of the rectilinear movement is obtained, and using the acceleration sensor value, the current coordinates of the robot are calculated.
- The robot performs a 90° right turn and moves straight ahead until the threshold of the right-hand ultrasonic sensor is exceeded. The time of the rectilinear movement is then obtained and the current coordinates of the robot are calculated following them. In the straight movement, the travel distance is calculated using the , since in this study, the robot velocity is constant.
- The robot performs a 90° right turn and moves straight ahead until its x coordinate is 0.5. The robot performs a 90° left turn and returns to its original regular travel. The coordinate calculations of the robot at this time are given by Equations (14) and (15):where v is robot velocity, time is the time of rectilinear movement, pi is the ratio of the circumference of the circle to its diameter, and degree is the rotation angle. These coordinates need to be adjusted in line with the actions of the robot; this is done only when required.
5. Experimental Verification
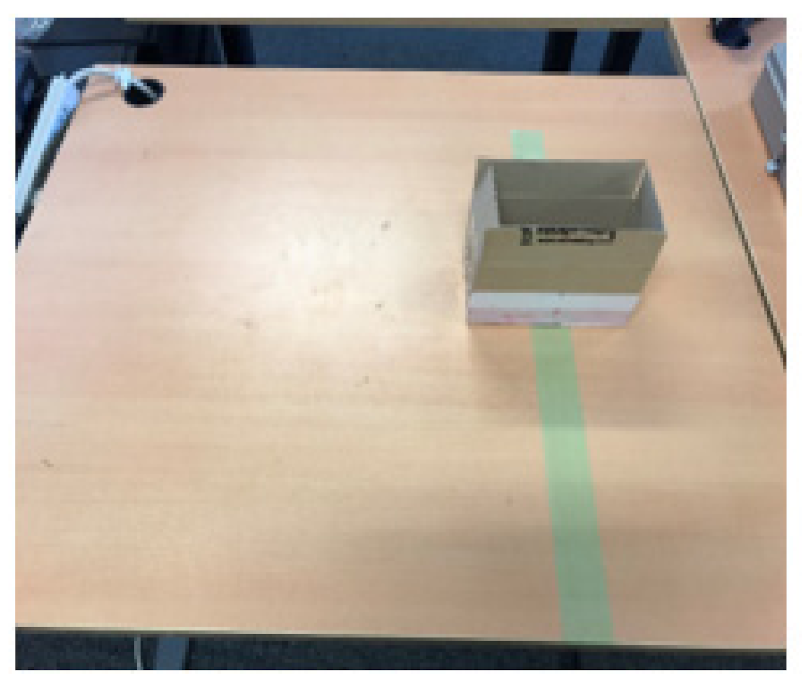
5.1. Experimental Environment
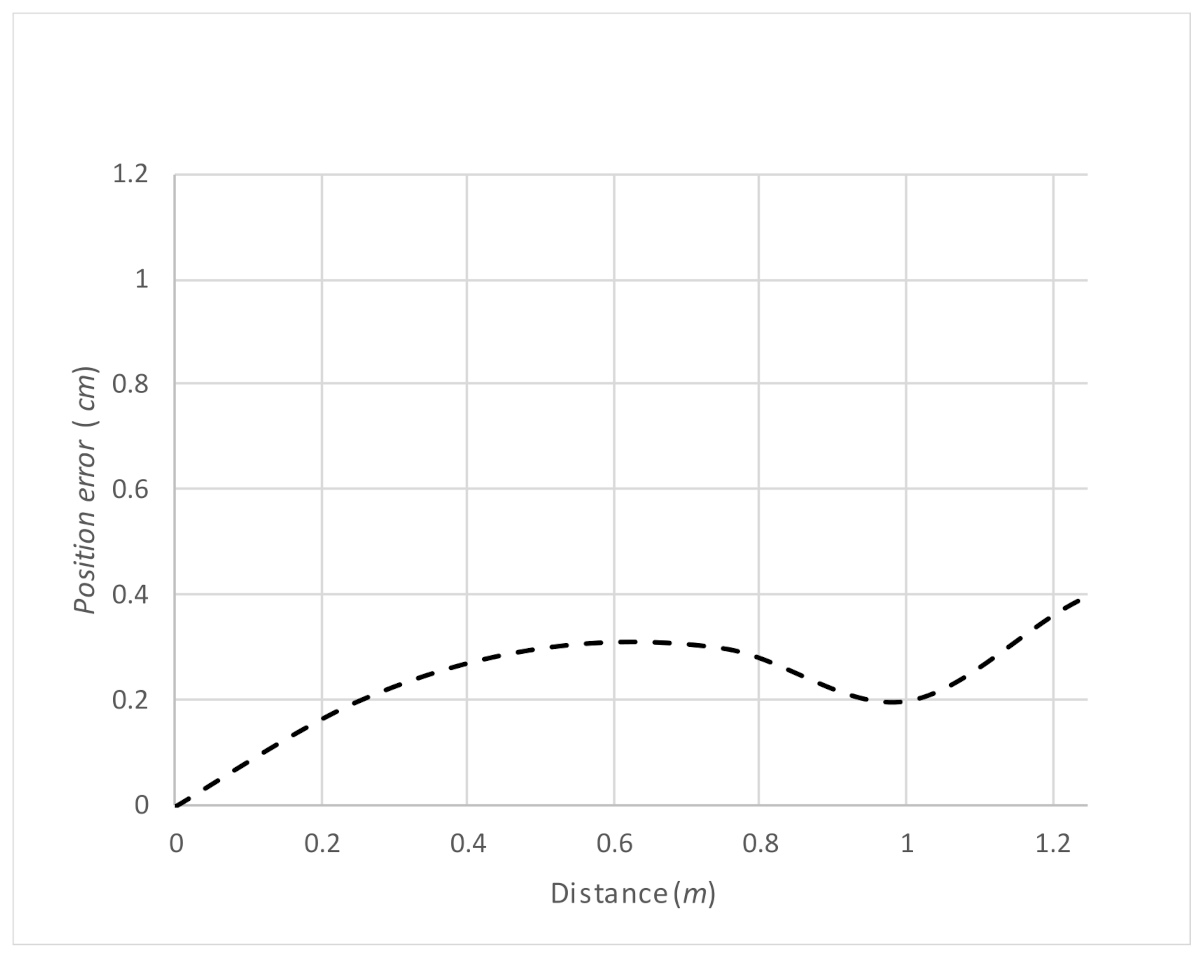
5.2. Experimental Results
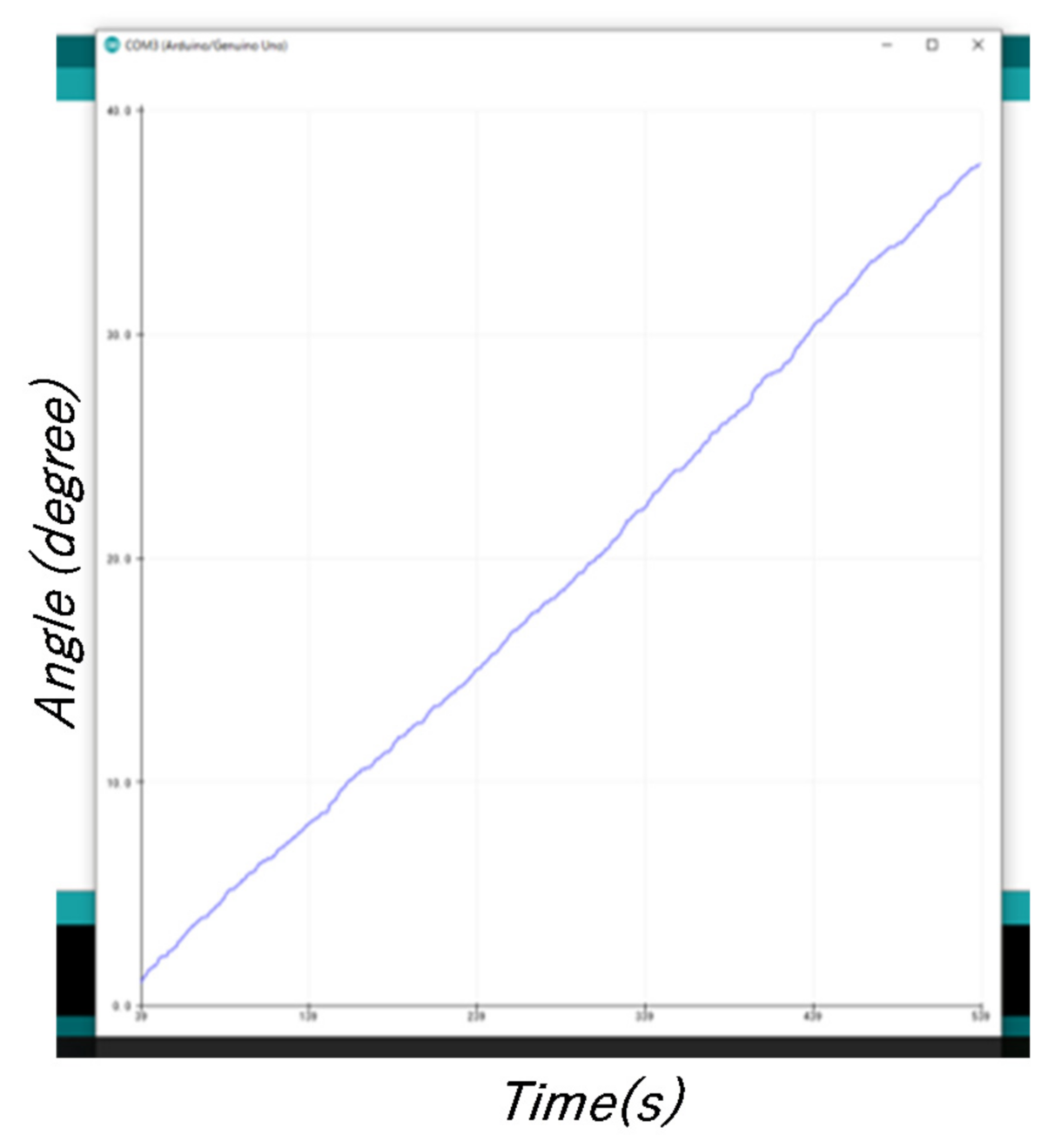
- (1)
- Attitude control—verification results
- (2)
- Fall prevention method—verification results
- (3)
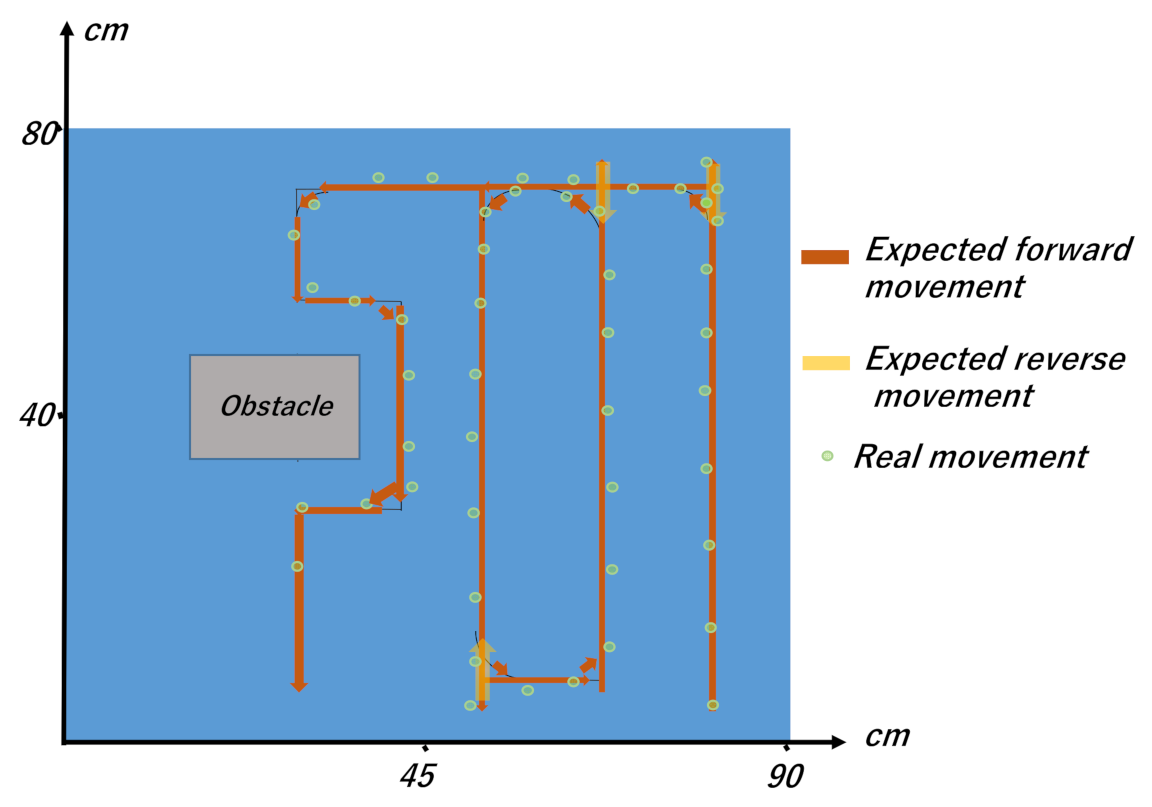
- Obstacle avoidance and subsequent return to the original path—experiment
- (4)
- Overall regular travel—experimental results
5.3. Discussion Regarding Conventional Methods
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, L.; Yang, Y.Z.; Wang, R. Inertia wheel pendulum robot balance control based on double closed-loop control system. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5021–5028. [Google Scholar]
- Yekinni, L.A.; Dan-Isa, A. Fuzzy logic control of goal-seeking 2-wheel differential mobile robot using unicycle approach. In Proceedings of the 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 29 June 2019; pp. 300–304. [Google Scholar]
- Wang, X.; Ge, H.; Zhang, K.; Chen, Y. System Design and Analysis of Outdoor Obstacle Surmounting Experiments for the Robot with Foldable Wheels. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 266–270. [Google Scholar]
- Liao, J.; Chen, Z.; Yao, B. Model-based coordinated control of four-wheel independently driven skid steer mobile robot with wheel–ground interaction and wheel dynamics. IEEE Trans. Ind. Inf. 2019, 15, 1742–1752. [Google Scholar] [CrossRef]
- Premachandra, C.; Gohara, R.; Ninomiya, T.; Kato, K. Smooth automatic stopping system for ultra-compact vehicles. IEEE Trans. Intel. Vehicles 2019, 4, 561–568. [Google Scholar] [CrossRef]
- Premachandra, C.; Murakami, M.; Gohara, R.; Ninomiya, T.; Kato, K. Improving landmark detection accuracy for self-localization through baseboard recognition. Int. J. Mach. Learn. Cybernet. 2017, 8, 1815–1826. [Google Scholar] [CrossRef]
- Ihalage, T.L.; Perera, A.N.; Sarathchandra, H.A.H.Y.; Premachandra, C. SLAM-based autonomous indoor navigation system for electric wheelchairs. In Proceedings of the 2020 International Conference on Image Processing and Robotics (ICIP), Negombo, Sri Lanka, 6–8 March 2020. [Google Scholar]
- Tsunoda, M.; Premachandra, C.; Sarathchandra, H.A.H.Y.; Perera, K.L.A.N.; Lakmal, I.T.; Premachandra, H.W.H. Visible Light Communication by Using LED Array for Automatic Wheelchair Control in Hospitals. In Proceedings of the 2019 IEEE 23rd International Symposium on Consumer Technologies (ISCT), Ancona, Italy, 19–21 June 2019; pp. 210–215. [Google Scholar]
- Premachandra, C.; Okamoto, Y.; Kato, K. High performance embedding environment for reacting suddenly appeared road obstacles. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 2394–2397. [Google Scholar]
- Yu, W.; Lin, D.; Song, T. Adaptive Control for UAV Close Formation Flight against Disturbances. In Proceedings of the 2018 3rd International Conference on Robotics and Automation Engineering (ICRAE), Guangzhou, China, 17–19 November 2018; pp. 196–201. [Google Scholar]
- Premachandra, C.; Takagi, S.; Kato, K. Flying control of small-type helicopter by detecting its in-air natural features. J. Electr. Sys. Inf. Technol. 2015, 2, 58–74. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Chen, Z.; Xi, L. Adaptive dual fuzzy PID control method for longitudinal attitude control of tail-sitter UAV. In Proceedings of the 2016 22nd International Conference on Automation and Computing (ICAC), Colchester, UK, 7–8 September 2016; pp. 378–382. [Google Scholar]
- Premachandra, C.; Otsuka, M.; Gohara, R.; Ninomiya, T.; Kato, K. A study on development of a hybrid aerial/terrestrial robot system for avoiding ground obstacles by flight. IEEE/CAA J. Autom. Sin. 2018, 6, 327–336. [Google Scholar] [CrossRef]
- Nakajima, K.; Premachandra, C.; Kato, K. 3D environment mapping and self-position estimation by a small flying robot mounted with a movable ultrasonic range sensor. J. Electr. Syst. Inf. Technol. 2017, 4, 289–298. [Google Scholar] [CrossRef]
- Yao, Z.; Wu, S. Intermittent Gliding Flight Control Design and Verification of a Morphing Unmanned Aerial Vehicle. IEEE Access 2019, 7, 40991–41005. [Google Scholar] [CrossRef]
- Premachandra, C.; Thanh, D.N.H.; Kimura, T.; Kawanaka, H. A study on hovering control of small aerial robot by sensing existing floor features. IEEE/CAA J. Autom. Sin. 2020, 7, 1016–1025. [Google Scholar] [CrossRef]
- Premachandra, C.; Ueda, D.; Kato, K. Speed-up automatic quadcopter position detection by sensing propeller rotation. IEEE Sens. J. 2019, 19, 2758–2766. [Google Scholar] [CrossRef]
- Higuchi, S.; Arimura, R.; Premachandra, C.; Kato, K. Design of two degree of freedom controller using data conversion method. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 1067–1072. [Google Scholar]
- Wang, H.; Wang, H.; Xu, W.; Mu, Z. Development and experiment of a snake-like robot composed of modularized isomorphic joints. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 3160–3165. [Google Scholar]
- Geng, S.; Peng, S.; Han, Y. Research on Motion Planning of Snake-Like Robot Based on the Interpolation Function. In Proceedings of the 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 27–28 August 2016; pp. 81–84. [Google Scholar]
- Rano, I.; Eguiluz, A.G.; Sanfilippo, F. Bridging the Gap between Bio-Inspired Steering and Locomotion: A Braitenberg 3a Snake Robot. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018; pp. 1394–1399. [Google Scholar]
- Sanfilippo, F.; Stavdahl, Ø.; Liljebäck, P. SnakeSIM: A ROS-based rapid-prototyping framework for perception-driven obstacle-aided locomotion of snake robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 1226–1231. [Google Scholar]
- Branyan, C.; Hatton, R.L.; Menguc, Y. Snake-Inspired Kirigami Skin for Lateral Undulation of a Soft Snake Robot. IEEE Robot. Autom. Lett. 2020, 5, 1728–1733. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, H.; Li, D.; Deng, H. Motion Control Curve of Snake-like Robot Based on Centroid Stability. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Atlanta, GA, USA, 11–14 June 2019; pp. 826–830. [Google Scholar]
- Manzoor, S.; Choi, Y. Modular design of snake robot for various motions implementation. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xian, China, 19–22 August 2016; pp. 211–213. [Google Scholar]
- Chavan, P.; Murugan, M.; Unnikkannan, E.V.; Singh, A.; Phadatare, P. Modular Snake Robot with Mapping and Navigation: Urban Search and Rescue (USAR) Robot. In Proceedings of the 2015 International Conference on Computing Communication Control and Automation, Washington, DC, USA, 26–27 February 2015; pp. 537–541. [Google Scholar]
- Park, C.-H.; Park, K.-T.; Gweon, D.-G. Development of Industrial Dual Arm Robot for Precision Assembly of Mechanical Parts for Automobiles. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Korea, 18–21 October 2006; pp. 3059–3062. [Google Scholar]
- Jhang, L.-H.; Santiago, C.; Chiu, C.-S. Multi-sensor based glove control of an industrial mobile robot arm. In Proceedings of the 2017 International Automatic Control Conference (CACS), Pingtung, Taiwan, 12–15 November 2017; pp. 1–6. [Google Scholar]
- Choi, T.; Do, H.; Park, K.T.; Kim, D.; Kyung, J. Small sized industrial dual-arm robot with convenient program interface. In Proceedings of the IEEE ISR, Seoul, Korea, 24–26 October 2013; pp. 1–5. [Google Scholar]
- Liu, B.; He, Y.; Kuang, Z. Design and Analysis of Dual-arm SCARA Robot Based on Stereo Simulation and 3D Modeling. In Proceedings of the 2018 IEEE International Conference on Information and Automation (ICIA), Fujian, China, 11–13 August 2018; pp. 1233–1237. [Google Scholar]
- Liu, S.; Zheng, L.; Wang, S.; Li, R.; Zhao, Y. Cognitive abilities of indoor cleaning robots. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016; pp. 1508–1513. [Google Scholar]
- Bae, Y.G.; Jung, S. Manipulability and kinematic analysis of a home service robot aimed for floor tasks. In Proceedings of the 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Korea, 26–28 November 2012; pp. 385–388. [Google Scholar]
- Zhao, Z.; Chen, W.; Peter, C.C.; Wu, X. A novel navigation system for indoor cleaning robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 2159–2164. [Google Scholar]
- Kim, J.; Cauli, N.; Vicente, P.; Damas, B.; Cavallo, F.; Santos-Victor, J. “iCub, clean the table!” A robot learning from demonstration approach using deep neural networks. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018; pp. 3–9. [Google Scholar]
- Kleiner, A.; Baravalle, R.; Kolling, A.; Pilotti, P.; Munich, M. A solution to room-by-room coverage for autonomous cleaning robots. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5346–5352. [Google Scholar]
- Cheng, Y.; Li, C.; Li, S.; Li, Z. Motion Planning of Redundant Manipulator with Variable Joint Velocity Limit Based on Beetle Antennae Search Algorithm. IEEE Access 2020, 8, 138788–138799. [Google Scholar] [CrossRef]
- Li, Z.; Li, S. Saturated PI Control for Nonlinear System with Provable Convergence: An Optimization Perspective. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 742–746. [Google Scholar] [CrossRef]
- Li, Z.; Zuo, W.; Li, S. Zeroing dynamics method for motion control of industrial upper-limb exoskeleton system with minimal potential energy modulation. Measurement 2020, 163, 107964. [Google Scholar] [CrossRef]
- Li, Z.; Li, C.; Li, S.; Cao, X. A Fault-Tolerant Method for Motion Planning of Industrial Redundant Manipulator. IEEE Trans. Ind. Inform. 2020, 16, 7469–7478. [Google Scholar] [CrossRef] [Green Version]
- Pandey, A.; Panwar, V.S.; Hasan, E.; Parhi, D.R. V-REP-based navigation of automated wheeled robot between obstacles using PSO-tuned feedforward neural network. J. Comput. Des. Eng. 2020, 7, 427–434. [Google Scholar] [CrossRef] [Green Version]
- Pandey, A.; Kashyap, A.K.; Parhi, D.R.; Patle, B. Autonomous mobile robot navigation between static and dynamic obstacles using multiple ANFIS architecture. World J. Eng. 2019, 16, 275–286. [Google Scholar] [CrossRef]
- Pandey, A.; Bej, N.; Kumar, R.; Panda, A.; Parhi, D.R. Type-2 Fuzzy Controller (T2FC) Based Motion Planning of Differential-Drive Pioneer P3-DX Wheeled Robot in V-REP Software Platform. In A Journey Towards Bio-inspired Techniques in Software Engineering; Metzler, J.B., Ed.; Springer: Cham, Switzerland, 2020; pp. 47–57. [Google Scholar]
- Yakoubi, M.A.; Laskri, M.T. The path planning of cleaner robot for coverage region using Genetic Algorithms. J. Innov. Digit. Ecosyst. 2016, 3, 37–43. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Bo, Z. Coverage path planning for mobile robot based on genetic algorithm. In Proceedings of the 2014 IEEE Workshop on Electronics, Computer and Applications, Ottawa, ON, Canada, 8–9 May 2014; pp. 5–14. [Google Scholar]
- Hasan, K.; Abdullah-Al-Nahid, K. Reza, Path planning algorithm development for autonomous vacuum cleaner robots. In Proceedings of the 2014 International Conference on Informatics, Electronics & Vision (ICIEV), Dhaka, Bangladesh, 23–24 May 2014; pp. 1–6. [Google Scholar]
- Al-Fahoum, A.S.; Abadir, M.S. Design of a Modified Madgwick Filter for Quaternion-Based Orientation Estimation Using AHRS. Int. J. Comput. Electr. Eng. 2018, 10, 174–186. [Google Scholar] [CrossRef] [Green Version]
- Demirhan, M.; Premachandra, C. Development of an Automated Camera-Based Drone Landing System. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Chung, C.-H.; Wang, K.-C.; Liu, K.-T.; Wu, Y.-T.; Lin, C.-C.; Chang, C.-Y. Path Planning Algorithm for Robotic Lawnmower using RTK-GPS Localization. In Proceedings of the 2020 International Symposium on Community-centric Systems (CcS), Tokyo, Japan, 23–26 September 2020. [Google Scholar]
- Ito, Y.; Premachandra, C.; Sumathipala, S.; Premachandra, H.W.H.; Sudantha, B.S. Tactile Paving Detection by Dynamic Thresholding Based on HSV Space Analysis for Developing a Walking Support System. IEEE Access 2021, 9, 20358–20367. [Google Scholar] [CrossRef]
- Su, H.; Mariani, A.; Ovur, S.E.; Menciassi, A.; Ferringo, G.; Momi, E.D. Toward Teaching by Demonstration for Robot-Assisted Minimally Invasive Surgery. IEEE Trans. Autom. Sci. Eng. 2021. [Google Scholar] [CrossRef]
- Su, H.; Qi, W.; Hu, Y.; Karimi, H.R.; Ferringo, G.; Momi, E.D. An Incremental Learning Framework for Human-like Redundancy Optimization of Anthropomorphic Manipulators. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]
- Su, H.; Hu, Y.; Karimi, H.R.; Knoll, A.; Ferrigno, G.; De Momi, E. Improved recurrent neural network-based manipulator control with remote center of motion constraints: Experimental results. Neural Netw. 2020, 131, 291–299. [Google Scholar] [CrossRef] [PubMed]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware | Role |
|---|---|
| AHRS | Robot attitude control |
| Ultrasonic sensor × 2 | Front and side obstacle detection |
| Distance sensors × 3 | Fall prevention; 2 on the front, 1 on the back |
| Arduino UNO | System processes and robot control |
| Exp. Number | Average Position Error during Straight Motion (cm) | Average Position Error during Obstacle Avoidance (cm) |
|---|---|---|
| 1 | 1.4 | 1.8 |
| 2 | 1.4 | 1.9 |
| 3 | 1.4 | 1.6 |
| 4 | 1.3 | 1.5 |
| 5 | 1.6 | 1.5 |
| 6 | 1.7 | 2.1 |
| 7 | 1.5 | 1.7 |
| 8 | 0.8 | 1.3 |
| 9 | 1.2 | 1.6 |
| 10 | 1.3 | 1.7 |
| 11 | 1.4 | 1.5 |
| 12 | 1.7 | 1.8 |
| 13 | 1.1 | 1.5 |
| 14 | 0.9 | 1.4 |
| 15 | 1.3 | 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tokunaga, S.; Premachandra, C.; Premachandra, H.W.H.; Kawanaka, H.; Sumathipala, S.; Sudantha, B.S. Autonomous Spiral Motion by a Small-Type Robot on an Obstacle-Available Surface. Micromachines 2021, 12, 375. https://doi.org/10.3390/mi12040375
Tokunaga S, Premachandra C, Premachandra HWH, Kawanaka H, Sumathipala S, Sudantha BS. Autonomous Spiral Motion by a Small-Type Robot on an Obstacle-Available Surface. Micromachines. 2021; 12(4):375. https://doi.org/10.3390/mi12040375
Chicago/Turabian StyleTokunaga, Shinya, Chinthaka Premachandra, H. Waruna H. Premachandra, Hiroharu Kawanaka, Sagara Sumathipala, and B. S. Sudantha. 2021. "Autonomous Spiral Motion by a Small-Type Robot on an Obstacle-Available Surface" Micromachines 12, no. 4: 375. https://doi.org/10.3390/mi12040375
APA StyleTokunaga, S., Premachandra, C., Premachandra, H. W. H., Kawanaka, H., Sumathipala, S., & Sudantha, B. S. (2021). Autonomous Spiral Motion by a Small-Type Robot on an Obstacle-Available Surface. Micromachines, 12(4), 375. https://doi.org/10.3390/mi12040375