
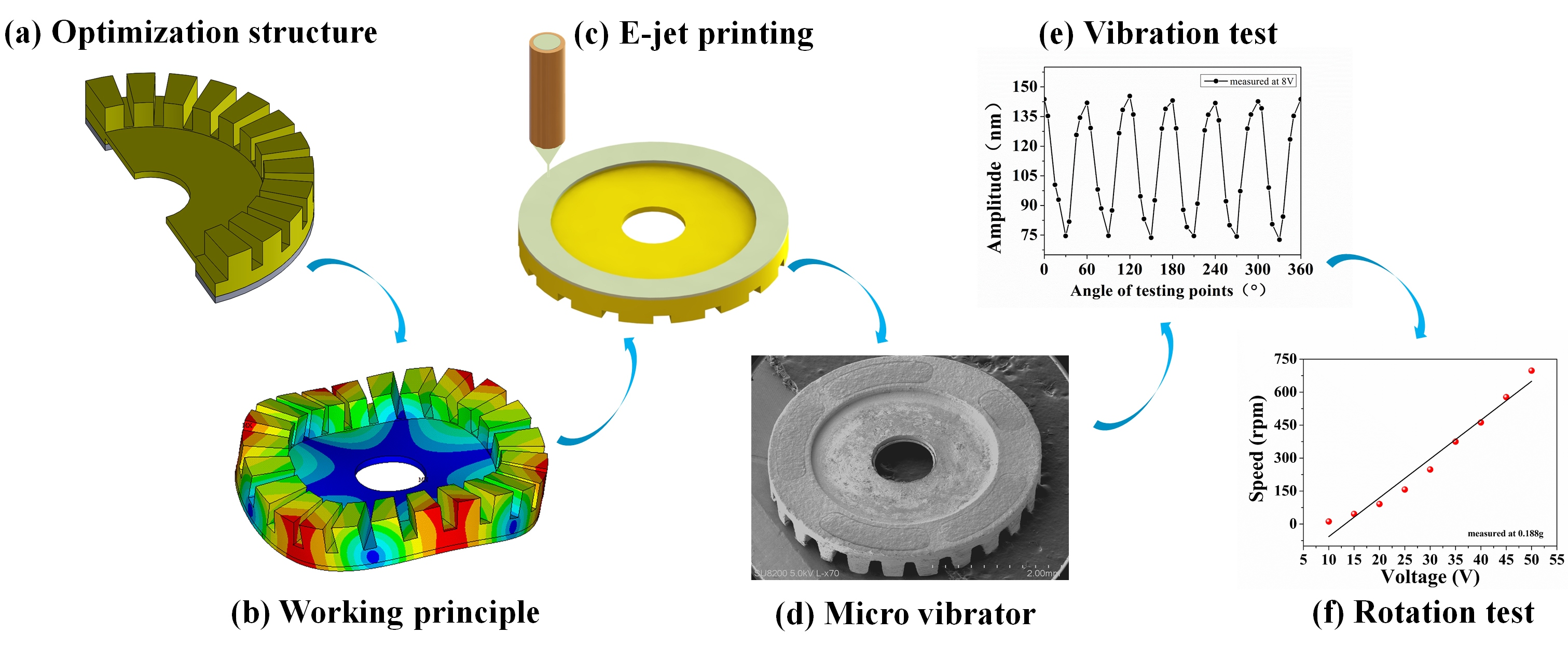
Fabrication and Characterization of a Microscale Piezoelectric Vibrator Based on Electrohydrodynamic Jet Printed PZT Thick Film

Abstract
:
1. Introduction
2. Experimental Details
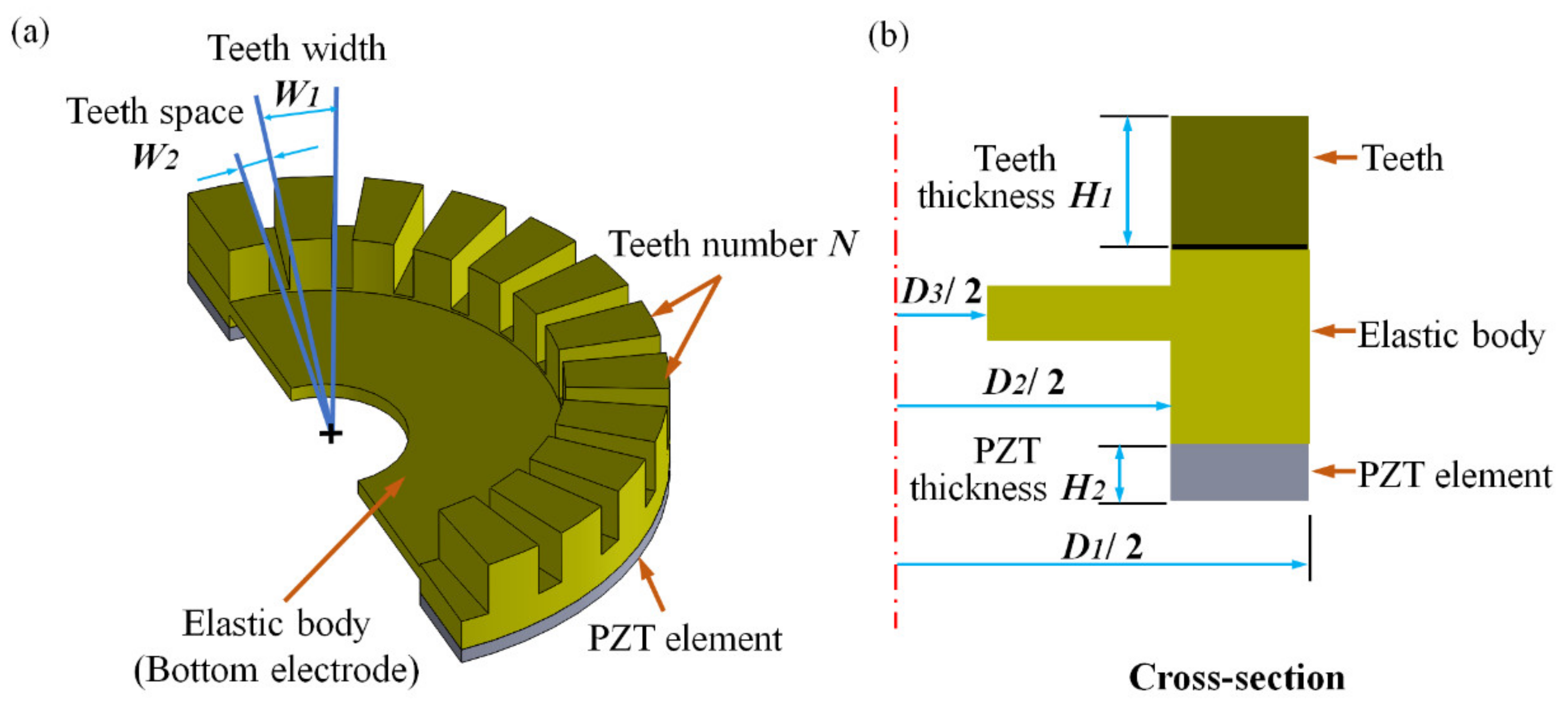
2.1. Design of the PZT Thick Film Micro Vibrator
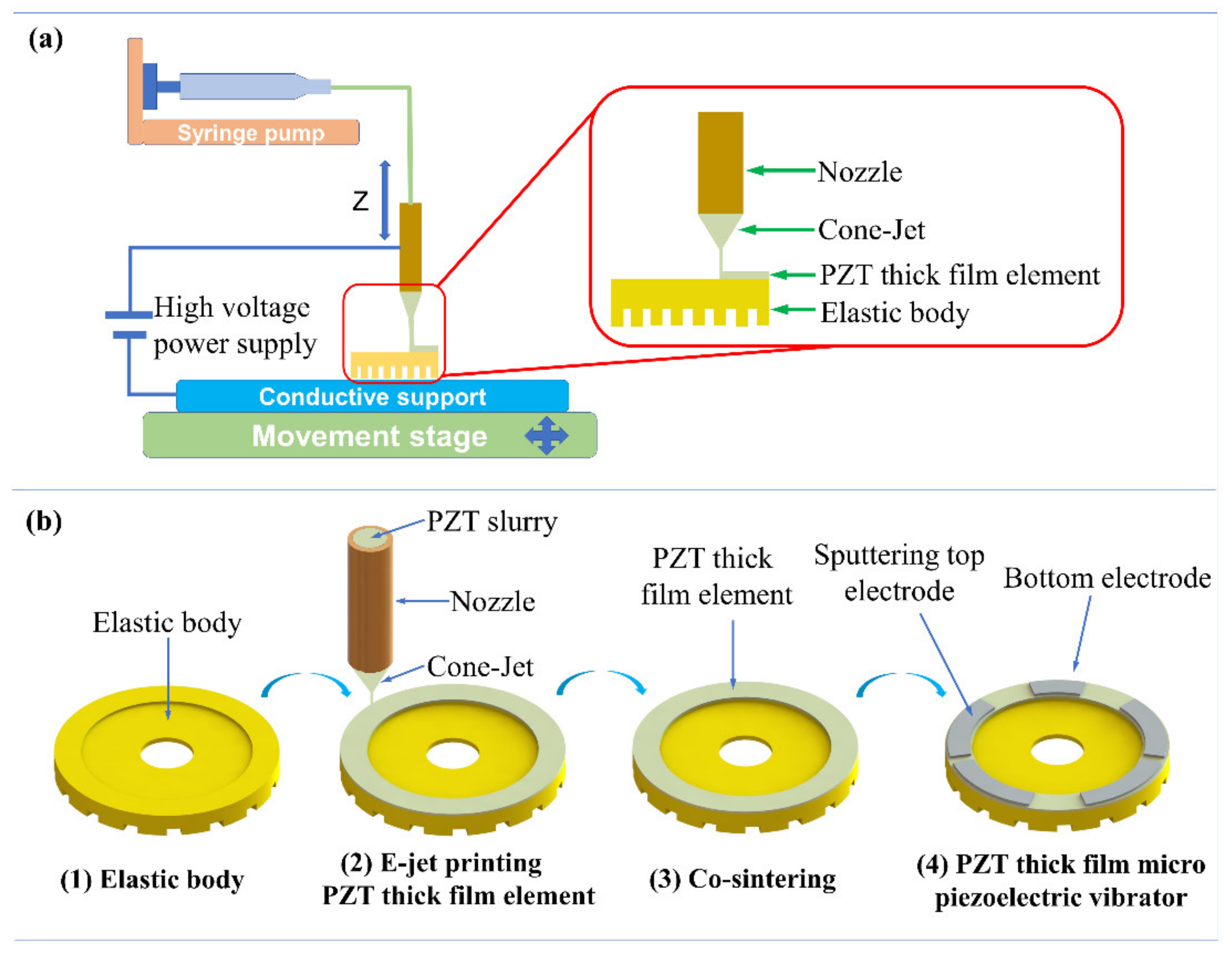
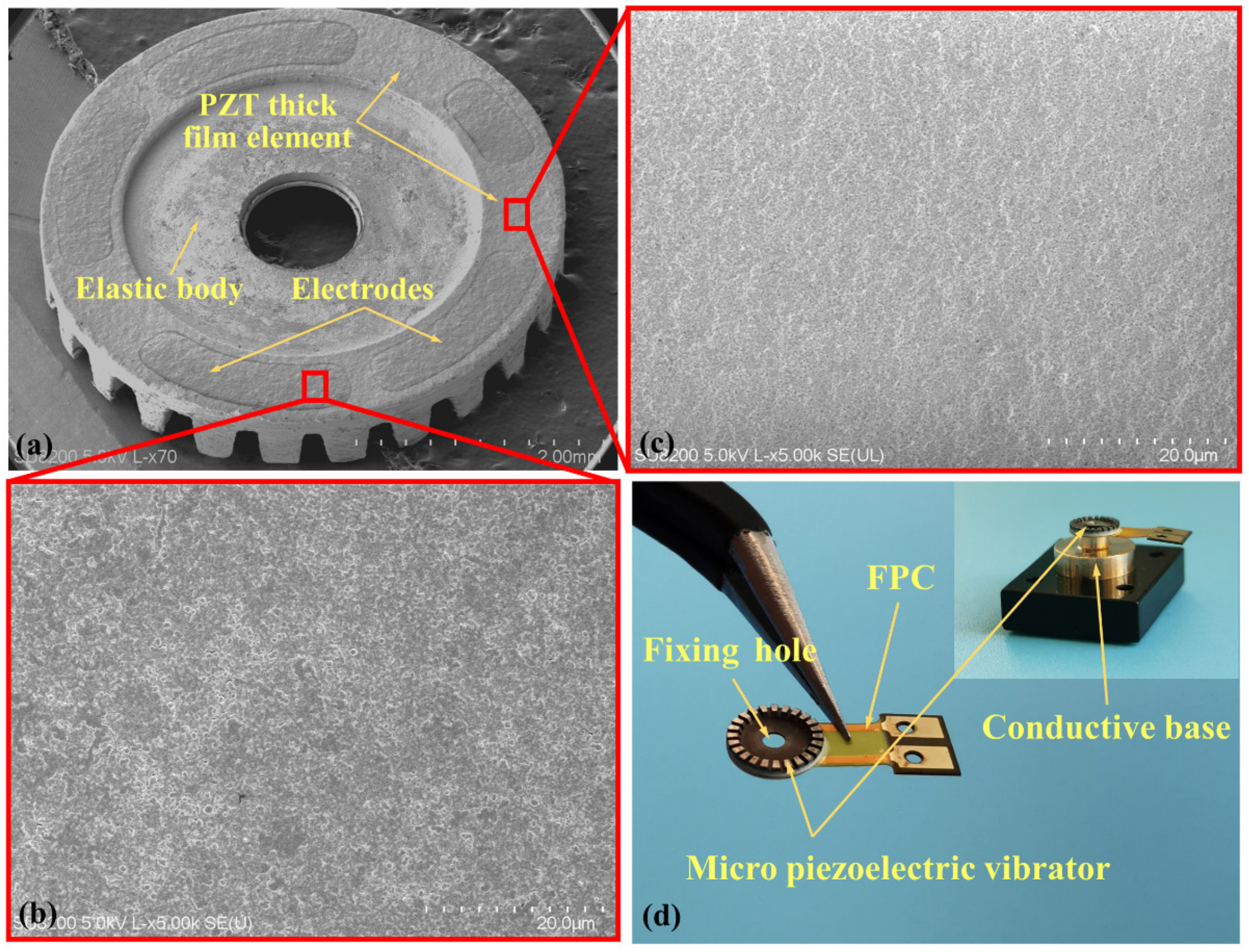
2.2. Preparation of the PZT Thick Film Micro Vibrator
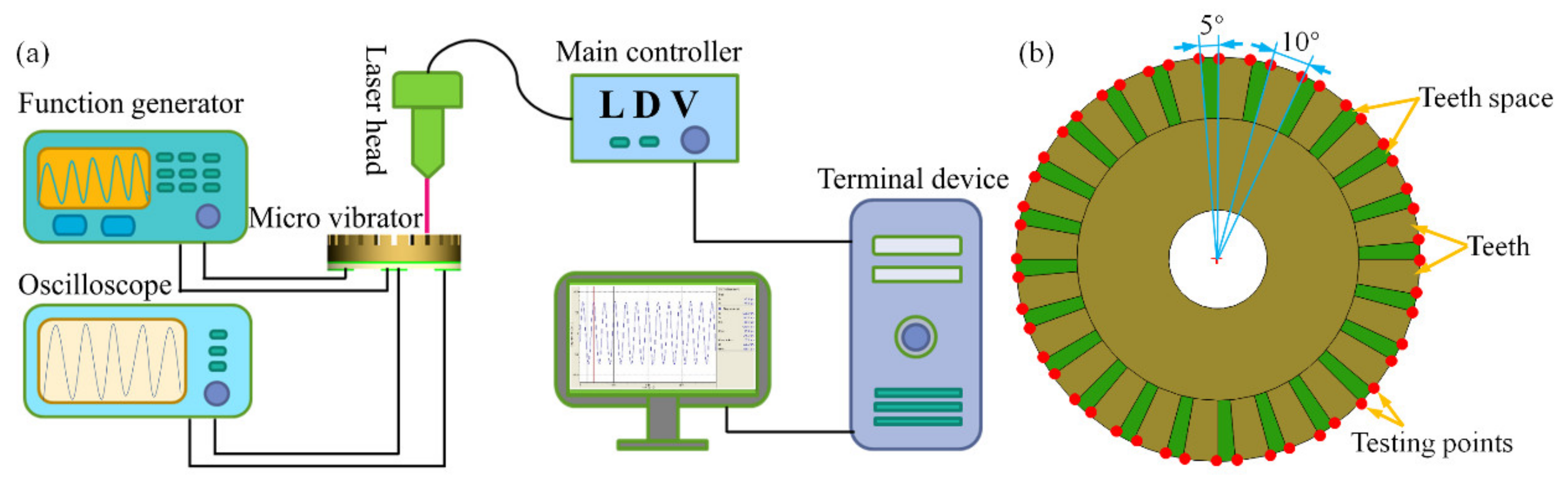
2.3. Vibration Measurement for the PZT Thick Film Micro Vibrator
3. Results and Discussion
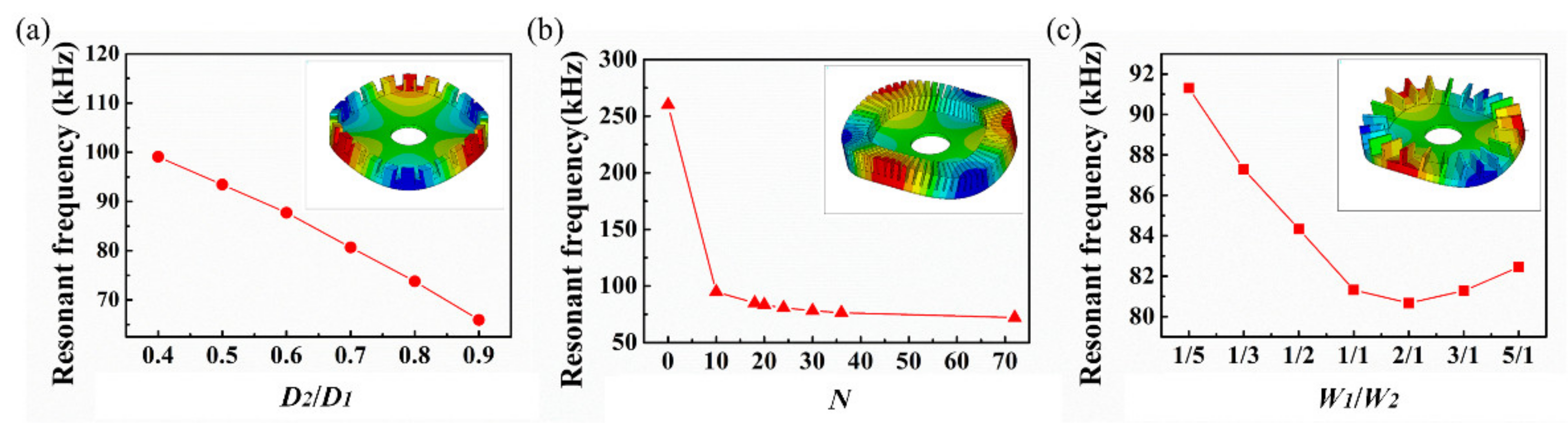
3.1. Optimization of PZT Thick Film Micro Vibrator
3.2. Modal and Transient Analysis of the PZT Thick Film Micro Vibrator
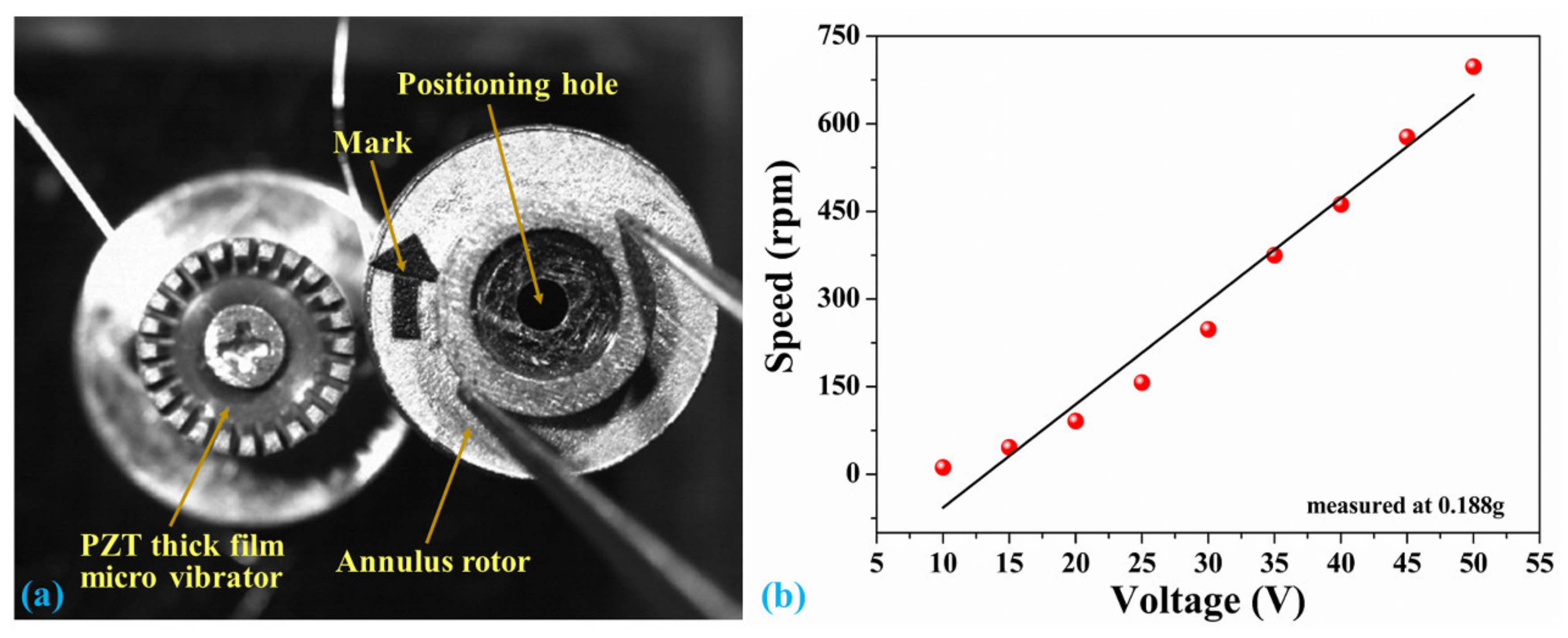
3.3. Vibration Characterization of PZT Thick Film Micro Vibrator
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Park, J.H.; Lim, T.W.; Kim, S.D.; Park, S.-H. Design and experimental verification of flexible plate-type piezoelectric vibrator for energy harvesting system. Int. J. Precis. Eng. Manuf. Green Technol. 2016, 3, 253–259. [Google Scholar] [CrossRef]
- Wu, J.; Mizuno, Y.; Tabaru, M.; Nakamura, K. Traveling wave ultrasonic motor using polymer-based vibrator. Jpn. J. Appl. Phys. 2015, 55, 018001. [Google Scholar] [CrossRef] [Green Version]
- An, D.; Ming, Y.; Zhuang, X.; Yang, T.; Meng, F.; Dong, Z. Dual traveling wave rotary ultrasonic motor with single active vibrator. Appl. Phys. Lett. 2017, 110, 143507. [Google Scholar] [CrossRef]
- Liu, J.; Niu, Z.-J.; Zhu, H.; Zhao, C.-S. Design and Experiment of a Large-Aperture Hollow Traveling Wave Ultrasonic Motor with Low Speed and High Torque. Appl. Sci. 2019, 9, 3979. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Hu, J.; Yang, L.; Zhao, C. A novel dual stator-ring rotary ultrasonic motor. Sens. Actuators A Phys. 2013, 189, 504–511. [Google Scholar] [CrossRef]
- Wang, G. Adhensive technology and its effects on performances of stator of ultrasonic motor. Chin. J. Mech. Eng. 2006, 42, 91–96. [Google Scholar] [CrossRef]
- Kirillova, E.; Seemann, W.; Shevtsova, M. The influence of an adhesive layer on the interaction between a piezo-actuator and an elastic 3D-layer and on the excited wave fields. Mater. Phys. Mech. 2019, 42, 40–53. [Google Scholar]
- Tian, X.; Qu, J.J.; Zhou, N.N. Several factors influencing properties of a traveling ultrasonic motor in vacuum and low temperature environment. Yuhang Xuebao/J. Astronaut. 2010, 31, 1452–1456. [Google Scholar]
- Guo, M.; Hu, J.; Zhu, H.; Zhao, C.; Dong, S. Three-degree-of-freedom ultrasonic motor using a 5-mm-diameter piezoelectric ceramic tube. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1446–1452. [Google Scholar] [CrossRef]
- Cagatay, S.; Koc, B.; Moses, P.; Uchino, K. A Piezoelectric Micromotor with a Stator of φ = 1.6 mm and l = 4 mm Using Bulk PZT. Jpn. J. Appl. Phys. 2004, 43, 1429–1433. [Google Scholar] [CrossRef]
- Li, E.; Kakemoto, H.; Hoshina, T.; Tsurumi, T. A shear-mode ultrasonic motor using potassium sodium niobate-based ceramics with high mechanical quality factor. Jpn. J. Appl. Phys. 2008, 47, 7702. [Google Scholar] [CrossRef]
- Koc, B.; Bouchilloux, P.; Uchino, K. Piezoelectric micromotor using a metal-ceramic composite structure. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2000, 47, 836–843. [Google Scholar] [CrossRef]
- Frayssignes, H.; Briot, R. Traveling wave ultrasonic motor: Coupling effects in free stator. Ultrasonics 2003, 41, 89–95. [Google Scholar] [CrossRef]
- Chen, W.; Shi, S.; Liu, Y.; Li, P. A new traveling wave ultrasonic motor using thick ring stator with nested PZT excitation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 1160–1168. [Google Scholar] [CrossRef] [PubMed]
- Racine, G.-A.; Muralt, P.; Dubois, M.-A. Flexural-standing-wave elastic force motor using ZnO and PZT thin film on micromachined silicon membranes for wristwatch applications. Smart Mater. Struct. 1998, 7, 404–416. [Google Scholar] [CrossRef]
- Qin, F.; Dai, G.; Sun, X.; Xu, Q.; Du, Y.; Bao, J. A Novel PZT-Based Traveling-Wave Micromotor with High Performance and Unconstrained Coaxial Rotation. J. Microelectromech. Syst. 2018, 99, 1–8. [Google Scholar] [CrossRef]
- Muralt, P. The emancipation of ferroelectricity. Nat. Mater. 2007, 6, 8–9. [Google Scholar] [CrossRef]
- Sama, N.; Soyer, C.; Remiens, D.; Verrue, C.; Bouregba, R. Bottom and top electrodes nature and PZT film thickness influence on electrical properties. Sens. Actuators A Phys. 2010, 158, 99–105. [Google Scholar] [CrossRef]
- Smith, G.L.; Rudy, R.Q.; Polcawich, R.G.; DeVoe, D.L. Integrated thin-film piezoelectric traveling wave ultrasonic motors. Sens. Actuators A Phys. 2012, 188, 305–311. [Google Scholar] [CrossRef]
- Groo, L.; Steinke, K.; Inman, D.J.; Sodano, H.A. Vibration Damping Mechanism of Fiber-Reinforced Composites with Integrated Piezoelectric Nanowires. ACS Appl. Mater. Interfaces 2019, 11, 47373–47381. [Google Scholar] [CrossRef]
- Farhangdoust, S.; Aghaei, S.M.; Amirahmadi, M.; Pala, N.; Mehrabi, A. Auxetic MEMS sensor. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2020; International Society for Optics and Photonics: San Diego, CA, USA, 2020; Volume 11379, p. 113790Z. [Google Scholar]
- Farhangdoust, S. Auxetic cantilever beam energy harvester. In Smart Structures and NDE for Industry 4.0, Smart Cities, and Energy Systems; International Society for Optics and Photonics: San Diego, CA, USA, 2020; Volume 11382, p. 113820V. [Google Scholar]
- Farhangdoust, S.; Georgeson, G.; Ihn, J.-B.; Aghaei, S.M.; Laflamme, S. Bio-inspired metasurface skin to enhance the performance of blue energy harvesting. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2021; International Society for Optics and Photonics: San Diego, CA, USA, 2021; Volume 11591, p. 115911D. [Google Scholar]
- Farhangdoust, S.; Georgeson, G.; Ihn, J.-B.; Chang, F.-K. Kirigami auxetic structure for high efficiency power harvesting in self-powered and wireless structural health monitoring systems. Smart Mater. Struct. 2020, 30, 015037. [Google Scholar] [CrossRef]
- Luo, L.; Liu, D.; Zhu, M.; Liu, Y.; Ye, J. Maximum energy conversion from human motion using piezoelectric flex transducer: A multi-level surrogate modeling strategy. J. Intell. Mater. Syst. Struct. 2018, 29, 3097–3107. [Google Scholar] [CrossRef] [Green Version]
- Erturk, A. Piezoelectric adventures: From energy harvesting and bioinspired robotics to programmable metamaterials and wireless data/power transfer. In Active and Passive Smart Structures and Integrated Systems XV; International Society for Optics and Photonics: San Diego, CA, USA, 2021; Volume 11588, p. 1158804. [Google Scholar]
- Lu, B.; Chen, Y.; Ou, D.; Chen, H.; Diao, L.; Zhang, W.; Zheng, J.; Ma, W.; Sun, L.; Feng, X. Ultra-flexible Piezoelectric Devices Integrated with Heart to Harvest the Biomechanical Energy. Sci. Rep. 2015, 5, 16065. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Song, X.; Lei, L.; Chen, X.; Fei, C.; Chiu, C.T.; Qian, X.; Ma, T.; Yang, Y.; Shung, K.; et al. 3D printing of piezoelectric element for energy focusing and ultrasonic sensing. Nano Energy 2016, 27, 78–86. [Google Scholar] [CrossRef] [Green Version]
- Sumerel, J.; Lewis, J.; Doraiswamy, A.; Deravi, L.F.; Sewell, S.L.; Gerdon, A.E.; Wright, D.W.; Narayan, R.J.J.B.J.H.N.T. Piezoelectric ink jet processing of materials for medicaland biological applications. Biotechnol. J. 2006, 1, 976–987. [Google Scholar] [CrossRef]
- Grinberg, D.; Siddique, S.; Le, M.Q.; Liang, R.; Capsal, J.F.; Cottinet, P.J. 4D Printing based piezoelectric composite for medical applications. J. Polym. Sci. Part B Polym. Phys. 2019, 57, 109–115. [Google Scholar] [CrossRef]
- Wu, J.; Mizuno, Y.; Nakamura, K. Piezoelectric motor utilizing an alumina/PZT transducer. IEEE Trans. Ind. Electron. 2019, 1. [Google Scholar] [CrossRef]
- Wang, D.; Shi, P.; Li, X.; Zhou, P.; Zhao, K.; Wei, Y.; Jiang, C.; Liang, J.; Dorey, R. Fabrication and characterisation of substrate-free PZT thick films. Ceram. Int. 2018, 44, 14258–14263. [Google Scholar] [CrossRef]
- Ayela, C.; Nicu, L.; Soyer, C.; Cattan, E.; Bergaud, C. Determination of the d31 piezoelectric coefficient of PbZrxTi1-xO3 thin films using multilayer buckled micromembranes. J. Appl. Phys. 2006, 100, 054908. [Google Scholar] [CrossRef]
- Wang, D.; Zhu, X.; Liang, J.; Ren, T.; Zha, W.; Dong, W.; Rocks, S.; Dorey, R.; Xu, Z.; Wang, X. Electrohydrodynamic jet printing of PZT thick film micro-scale structures. J. Eur. Ceram. Soc. 2015, 35, 3475–3483. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Fan, H.; Li, Q. Characterization of acceptor-doped (Ba, Ca)TiO3 “hard” piezoelectric ceramics for high-power applications. Ceram. Int. 2017, 43, 5579–5584. [Google Scholar] [CrossRef]
- Chan, V.; Perlas, A. Basics of ultrasound imaging. In Atlas of Ultrasound-Guided Procedures in Interventional Pain Management; Springer: Berlin/Heidelberg, Germany, 2011; pp. 13–19. [Google Scholar]
- Song, T.-f.; Jiang, X.-s.; Shao, Z.-y.; Mo, D.-F.; Zhu, D.-G.; Zhu, M.-H.; Young, C.H.; Luo, Z.-P. Interfacial microstructure and mechanical properties of diffusion-bonded joints of titanium TC4 (Ti-6Al-4V) and Kovar (Fe-29Ni-17Co) alloys. J. Iron Steel Res. Int. 2017, 24, 1023–1031. [Google Scholar] [CrossRef]
- Hu, C.; Hu, X.; Ji, J.; Liu, J.; Li, S. Dynamics Analysis on Piezoelectric Laminated Vibratori and Optimization of PZT Position. Shock Vib. 2016, 2016, 8403829. [Google Scholar] [CrossRef] [Green Version]
- Shafik, A.; Mrad, R.B. Piezoelectric Motor Technology: A Review. In Nanopositioning Technologies; Springer: Berlin/Heidelberg, Germany, 2016; pp. 33–59. [Google Scholar]
- Yan, J.-P.; Liu, Y.-X.; Shi, S.-J.; Ni, X.-H.; Xiong, H.-Y. Working principle and design of a linear ultrasonic motor with ring-type stator. In Proceedings of the 2015 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Jinan, China, 30 October–2 November 2015. [Google Scholar]
- Morega, A.M.; Morega, M.; Pislaru-Danescu, L. Piezoelectric ultrasonic traveling wave motor. In Proceedings of the 2016 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 6–8 October 2016. [Google Scholar]
- Yung, T.; Liang-Chiang, C.; Chun-Chung, L.; Huang, J.L. Traveling-wave piezoelectric linear motor Part I: The stator design. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 847–853. [Google Scholar]
- Li, H.; Wang, L.; Cheng, T.; He, M.; Zhao, H.; Gao, H. A High-Thrust Screw-Type Piezoelectric Ultrasonic Motor with Three-Wavelength Exciting Mode. Appl. Sci. 2016, 6, 442. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | PZT | Titanium Elastic Body |
|---|---|---|
| Elastic stiffness matrix (×109 N/m2) | 110 | |
| Piezoelectric stress matrix (C/m2) | - | |
| Relative dielectric matrix | - | |
| Poisson’s ratio | - | 0.34 |
| Density (kg/m3) | 7500 | 4500 |
| Curie temperature, TC (°C) | 300 | - |
| Parameters | D1 | D2 | W1/W2 | N | H1 | H2 |
|---|---|---|---|---|---|---|
| Value | 4.3 | 3.3 | 2:1 | 24 | 0.25 | 0.035 |
| Vibration Mode | FEA Frequency (kHz) | LDV Frequency (kHz) | Frequency Percent Error (%) | FEA Amplitude (nm) | LDV Amplitude (nm) | Amplitude Percent Error (%) |
|---|---|---|---|---|---|---|
| B02 | 30.05 | 29.74 | 1.03 | 417 | 406 | 2.64 |
| B03 | 79.42 | 79.14 | 0.35 | 184 | 176 | 4.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Zhao, K.; Yuan, Y.; Wang, Z.; Zong, H.; Zhang, X.; Liang, J. Fabrication and Characterization of a Microscale Piezoelectric Vibrator Based on Electrohydrodynamic Jet Printed PZT Thick Film. Micromachines 2021, 12, 524. https://doi.org/10.3390/mi12050524
Wang D, Zhao K, Yuan Y, Wang Z, Zong H, Zhang X, Liang J. Fabrication and Characterization of a Microscale Piezoelectric Vibrator Based on Electrohydrodynamic Jet Printed PZT Thick Film. Micromachines. 2021; 12(5):524. https://doi.org/10.3390/mi12050524
Chicago/Turabian StyleWang, Dazhi, Kuipeng Zhao, Yuheng Yuan, Zhu Wang, Haoran Zong, Xi Zhang, and Junsheng Liang. 2021. "Fabrication and Characterization of a Microscale Piezoelectric Vibrator Based on Electrohydrodynamic Jet Printed PZT Thick Film" Micromachines 12, no. 5: 524. https://doi.org/10.3390/mi12050524
APA StyleWang, D., Zhao, K., Yuan, Y., Wang, Z., Zong, H., Zhang, X., & Liang, J. (2021). Fabrication and Characterization of a Microscale Piezoelectric Vibrator Based on Electrohydrodynamic Jet Printed PZT Thick Film. Micromachines, 12(5), 524. https://doi.org/10.3390/mi12050524