
Beam Formation and Vernier Steering Off of a Rough Surface

Abstract
:1. Introduction
2. Refocusing Reflected Light from an Intermediate Surface
2.1. Materials and Methods
2.2. Results and Discussion
3. Non-Mechanical Beam Steering
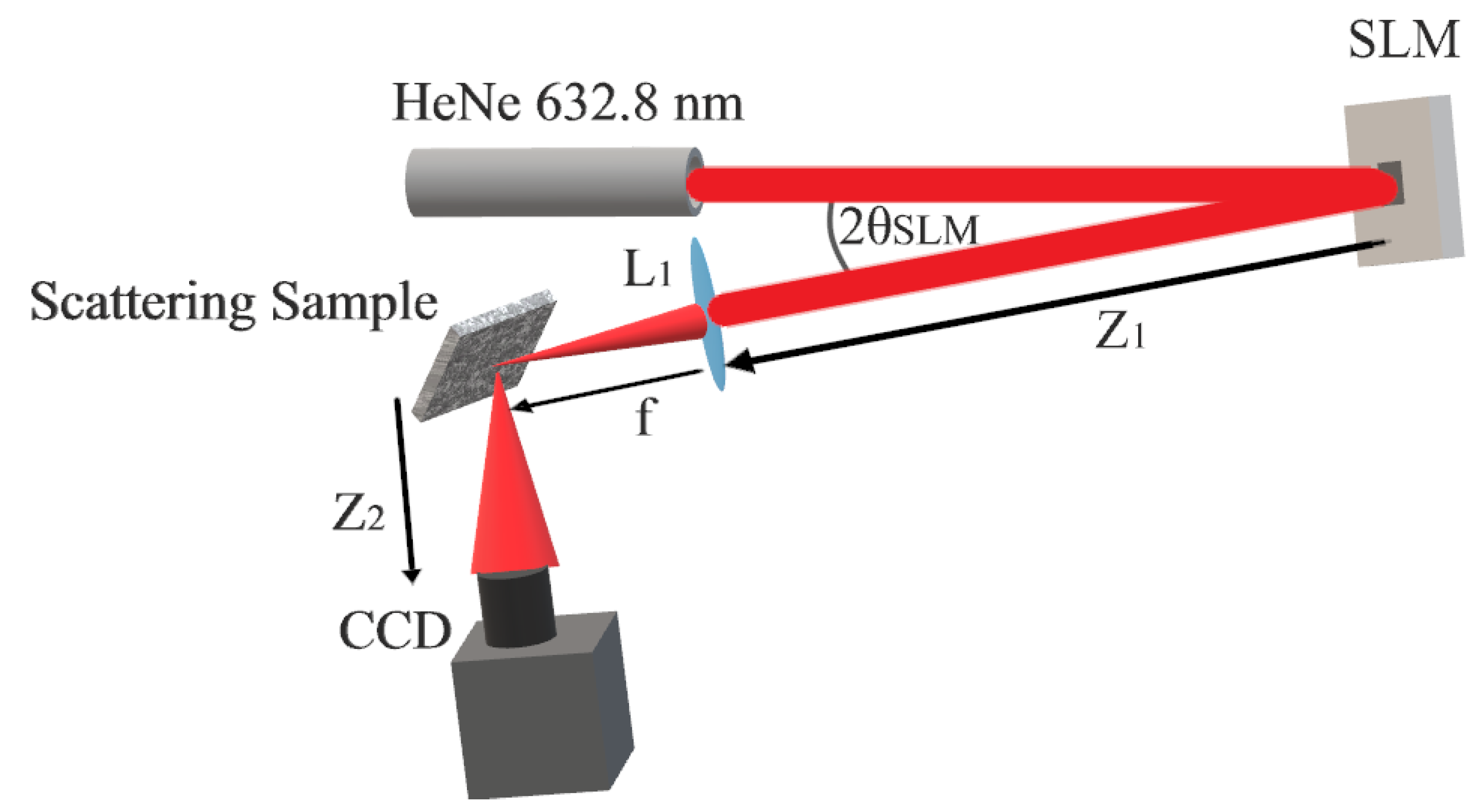
3.1. Materials and Methods
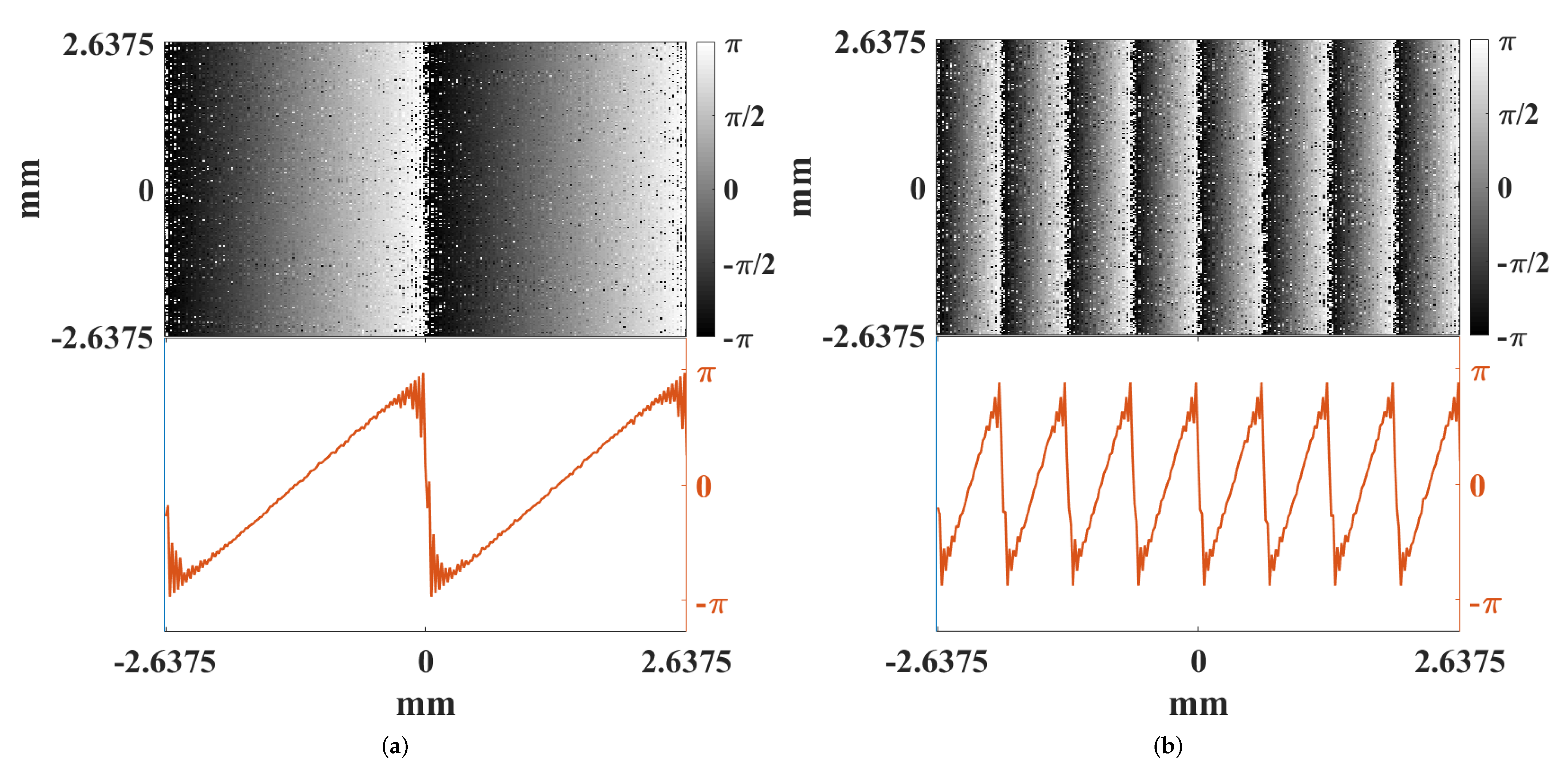
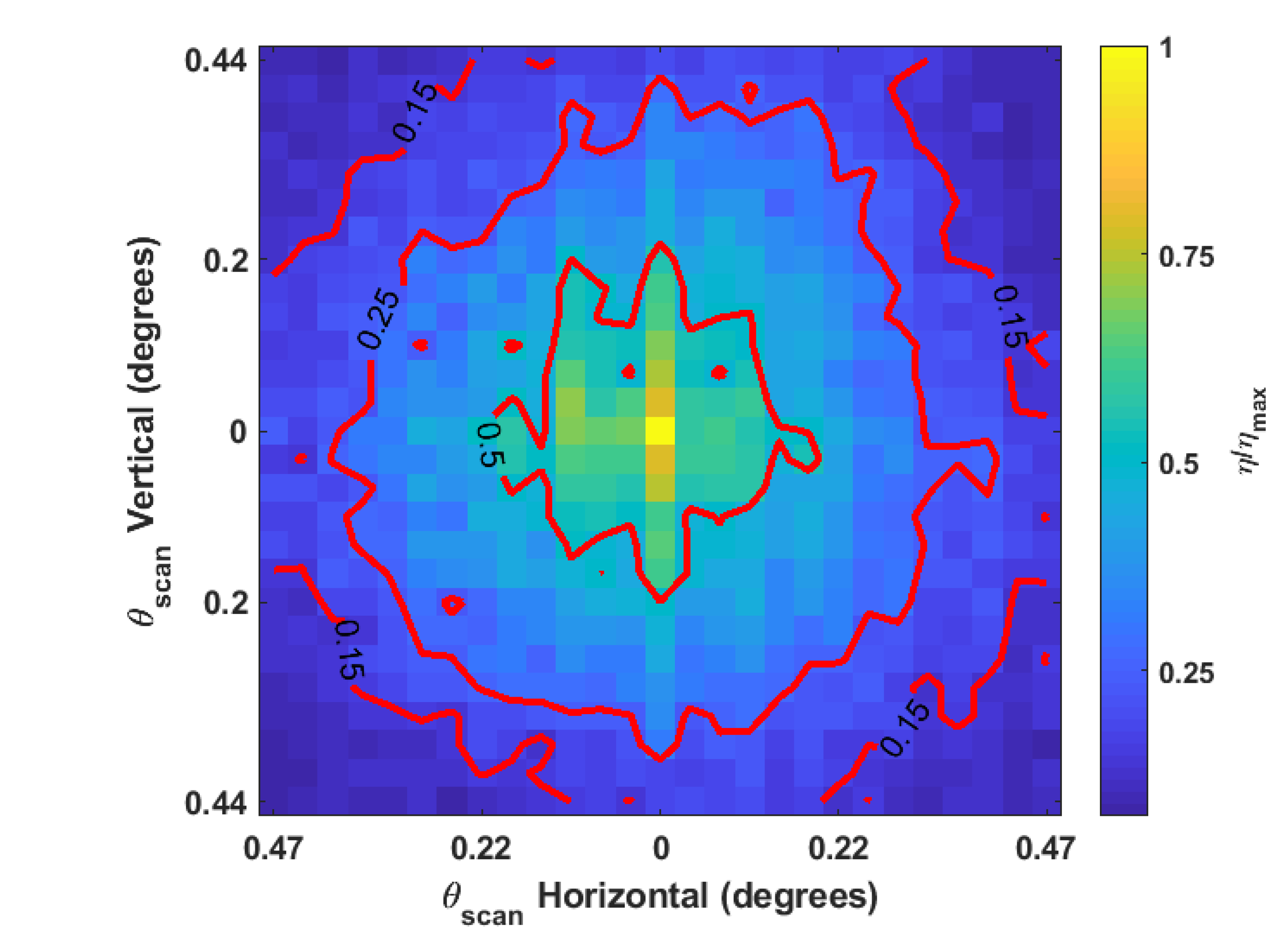
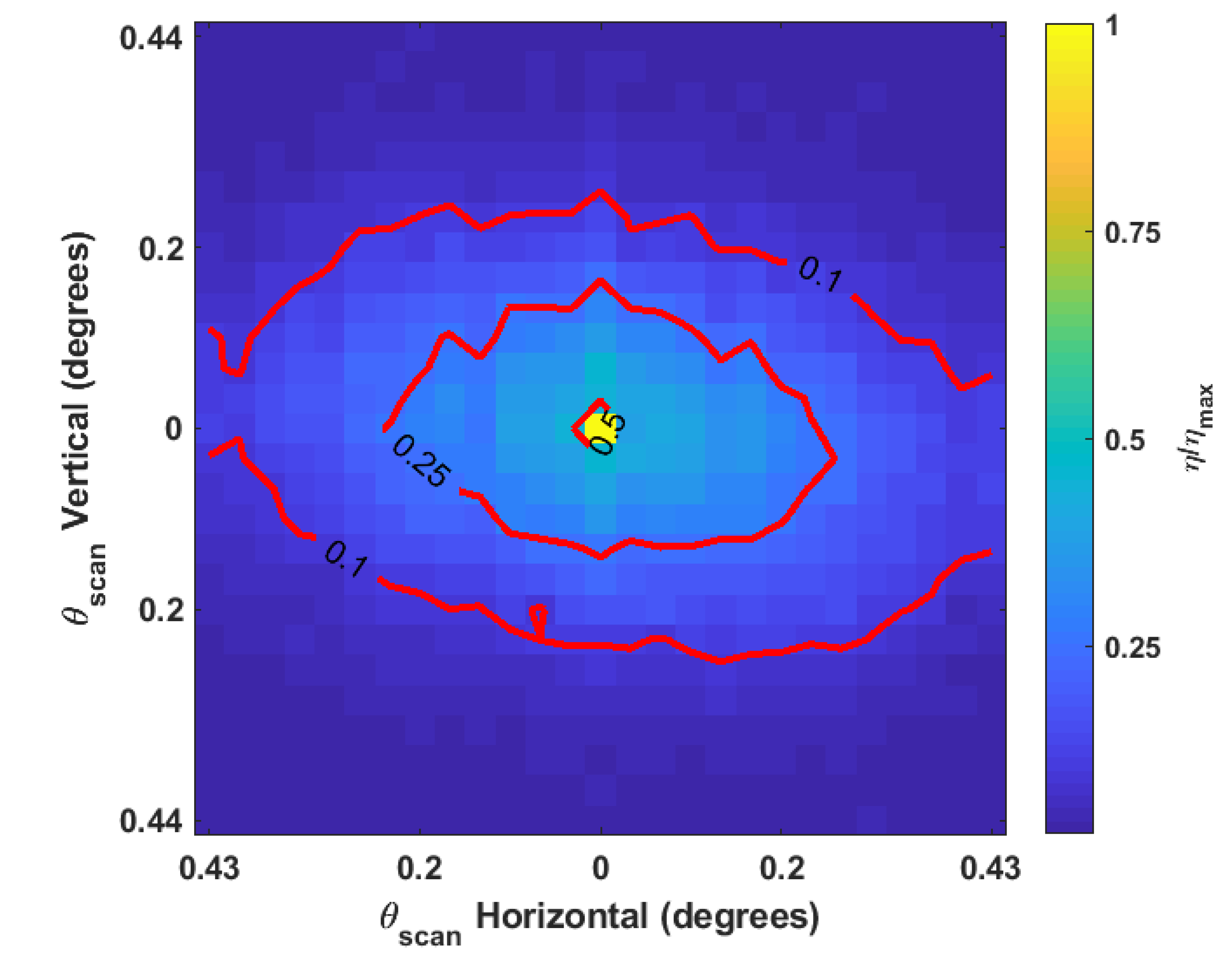
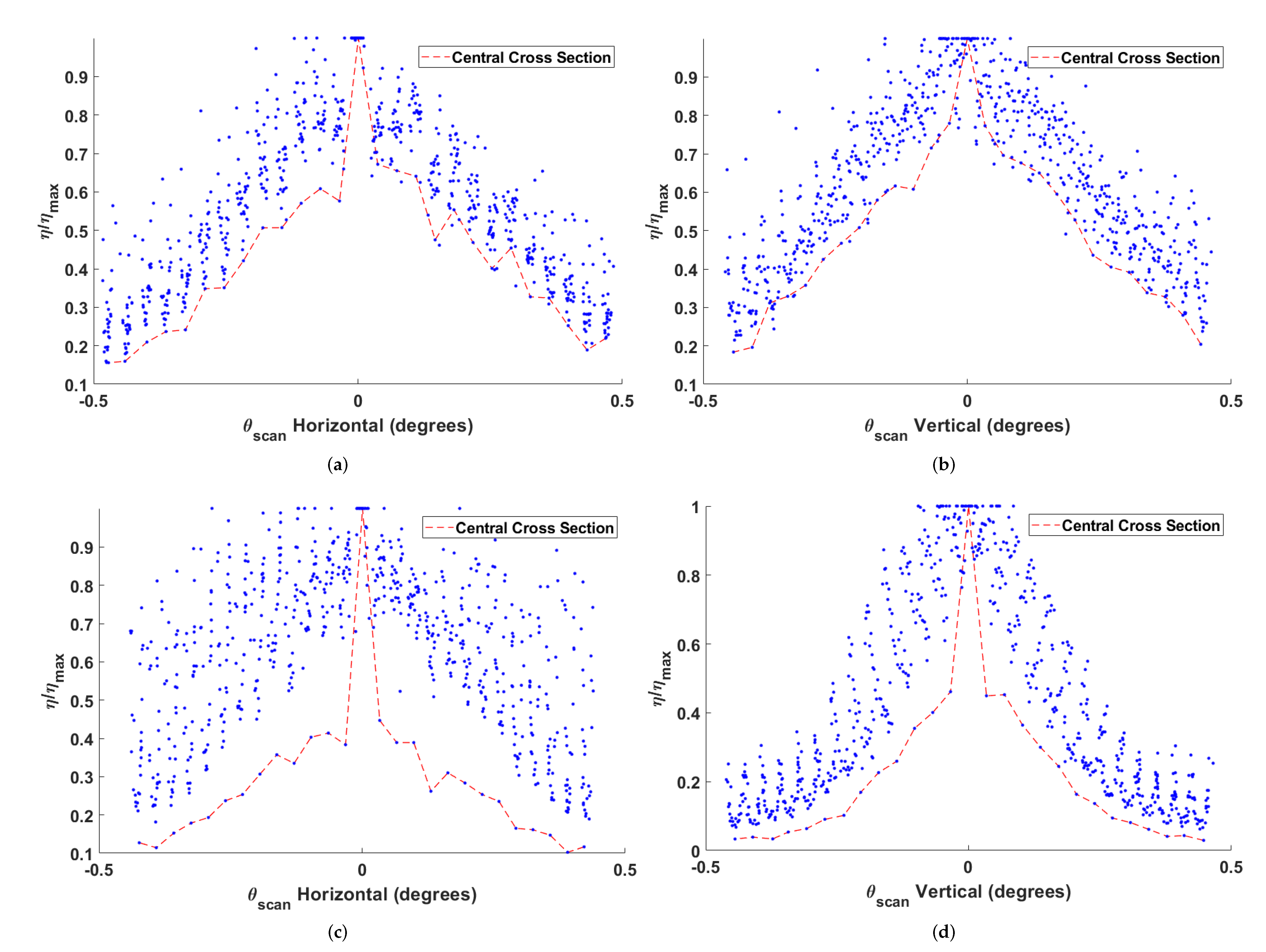
3.2. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SLM | Spatial Light Modulator |
| DMD | Digital Micromirror Device |
| PA | Partitioning Algorithm |
| CSA | Continuous Sequential Algorithm |
| GA | Genetic Algorithm |
References
- Freund, I. Looking through walls and around corners. Phys. A Stat. Mech. Appl. 1990, 168, 49–65. [Google Scholar] [CrossRef]
- Vellekoop, I.M.; Mosk, A. Focusing coherent light through opaque strongly scattering media. Opt. Lett. 2007, 32, 2309–2311. [Google Scholar] [CrossRef]
- Vellekoop, I.; Mosk, A. Phase control algorithms for focusing light through turbid media. Opt. Commun. 2008, 281, 3071–3080. [Google Scholar] [CrossRef] [Green Version]
- Popoff, S.M.; Lerosey, G.; Fink, M.; Boccara, A.; Gigan, S. Controlling light through optical disordered media: Transmission matrix approach. New J. Phys. 2011, 13, 123021. [Google Scholar] [CrossRef]
- Aulbach, J.; Gjonaj, B.; Johnson, P.; Mosk, A.P.; Lagendijk, A. Control of light transmission through opaque scattering media in space and time. Phys. Rev. Lett. 2011, 106, 320–322. [Google Scholar] [CrossRef] [PubMed]
- Cui, M. Parallel wavefront optimization method for focusing light through random scattering media. Opt. Lett. 2011, 36, 870–872. [Google Scholar] [CrossRef]
- Cui, M. A high speed wavefront determination method based on spatial frequency modulations for focusing light through random scattering media. Opt. Express 2011, 19, 2989–2995. [Google Scholar] [CrossRef] [PubMed]
- Conkey, D.B.; Brown, A.N.; Caravaca-Aguire, A.M.; Piestun, R. Genetic algorithm optimization for focusing through turbid media in noisy environments. Opt. Express 2012, 20, 4840–4849. [Google Scholar] [CrossRef] [PubMed]
- Katz, O.; Small, E.; Silberberg, Y. Looking around corners and through thin turbid layers in real time with scattered light. Nat. Photonics 2012, 6, 549–553. [Google Scholar] [CrossRef]
- Mosk, A.P.; Lagendijk, A.; Lerosey, G.; Fink, M. Controlling waves in space and time for imaging in complex media. Nat. Photonics 2012, 6, 283–292. [Google Scholar] [CrossRef] [Green Version]
- Vellekoop, I.M. Feedback-based wavefront shaping. Opt. Express 2015, 23, 12189–12206. [Google Scholar] [CrossRef] [PubMed]
- Burgi, K.; Ullom, J.; Marciniak, M.; Oxley, M. Reflective Inverse Diffusion. Appl. Sci. 2016, 6, 370. [Google Scholar] [CrossRef] [Green Version]
- Burgi, K.; Marciniak, M.; Oxley, M.; Nauyoks, S. Measuring the Reflection Matrix of a Rough Surface. Appl. Sci. 2016, 7, 568. [Google Scholar] [CrossRef] [Green Version]
- Burgi, K.W. Reflective Matrix Method for Controlling Light after Reflection from a Diffuse Scattering Surface. Ph.D. Thesis, Air Force Institute of Technology, Dayton, OH, USA, 2016. [Google Scholar]
- Vellekoop, I.M.; Lagendijk, A.; Mosk, A.P. Exploiting disorder for perfect focusing. Nat. Photonics 2010, 4, 320–322. [Google Scholar] [CrossRef] [Green Version]
- Popoff, S.M.; Lerosey, G.; Carminati, R.; Fink, M.; Boccara, A.C.; Gigan, S. Measuring the Transmission Matrix in Optics: An Approach to the Study and Control of Light Propagation in Disordered Media. Phys. Rev. Lett. 2010, 104, 100601. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.; Choi, W.; Choi, Y.; Yoon, C.; Choi, W. Transmission matrix of a scattering medium and its applications in biophotonics. Opt. Express 2015, 23, 12648–12668. [Google Scholar] [CrossRef]
- Park, C.; Park, J.H.; Rodriguez, C.; Yu, H.; Kim, M.; Jin, K.; Han, S.; Shin, J.; Ko, S.H.; Nam, K.T.; et al. Full-Field Subwavelength Imaging Using a Scattering Superlens. Phys. Rev. Lett. 2014, 113, 113901. [Google Scholar] [CrossRef] [Green Version]
- Park, J.H.; Park, C.; Yu, H.; Park, J.; Han, S.; Shin, J.; Ko, S.H.; Nam, K.T.; Cho, Y.H.; Park, Y. Subwavelength light focusing using random nanoparticles. Nat. Photonics 2013, 7, 454–458. [Google Scholar] [CrossRef]
- Burgi, K.W.; Marciniak, M.A.; Nauyoks, S.E.; Oxley, M.E. Exploiting redundant phase information of a reflection matrix. In Optical Trapping and Optical Micromanipulation XIV; Dholakia, K., Spalding, G.C., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10347, pp. 40–49. [Google Scholar] [CrossRef]
- Nagamine, E.K.; Burgi, K.W.; Butler, S.D.; Marciniak, M.A. Nonmechanical beam-steering in reflective inverse diffusion. In Laser Beam Shaping XIX; Dudley, A., Laskin, A.V., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; Volume 11107, pp. 23–29. [Google Scholar] [CrossRef]
- Kim, I.; Martins, R.J.; Jang, J.; Badloe, T.; Khadir, S.; Jung, H.Y.; Kim, H.; Kim, J.; Genevet, P.; Rho, J. Nanophotonics for light detection and ranging technology. Nat. Nanotechnol. 2021, 16, 508–524. [Google Scholar] [CrossRef]
- Yeminy, T.; Katz, O. Guidestar-free image-guided wavefront-shaping. arXiv 2020, arXiv:2007.03956. [Google Scholar]
- Hoelscher, M.G.; Marciniak, M.A. Restoration of scene information reflected from a non-specular surface. In Reflection, Scattering, and Diffraction from Surfaces II; Gu, Z.H., Hanssen, L.M., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7792, pp. 148–159. [Google Scholar] [CrossRef]
- Hoelscher, M.G. Restoration of Scene Information Reflected from Non-Specular Media. Ph.D. Thesis, Air Force Institute of Technology, Dayton, OH, USA, 2011. [Google Scholar]
- Goodman, J. Introduction to Fourier Optics, 4th ed.; W.H. Freeman and Company: New York, NY, USA, 2017. [Google Scholar]
- Li, Z.; Dai, Q.; Mehmood, M.Q.; Hu, G.; Yanchuk, B.L.; Tao, J.; Hao, C.; Kim, I.; Jeong, H.; Zheng, G.; et al. Full-space Cloud of Random Points with a Scrambling Metasurface. Light. Sci. Appl. 2018, 7, 63. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | Roughness | Correlation, | Slope | Correlation |
|---|---|---|---|---|
| 600-grit Nickel, average | m | m | m | |
| White Paint on Glass, average | m | m | m |
| Scan: Material, Axis | Equation (4) Increment | Measured Increment |
|---|---|---|
| Nickel, horizontal | ||
| Nickel, vertical | ||
| Paint, horizontal | ||
| Paint, vertical |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagamine, E.K.; Burgi, K.W.; Butler, S.D. Beam Formation and Vernier Steering Off of a Rough Surface. Micromachines 2021, 12, 871. https://doi.org/10.3390/mi12080871
Nagamine EK, Burgi KW, Butler SD. Beam Formation and Vernier Steering Off of a Rough Surface. Micromachines. 2021; 12(8):871. https://doi.org/10.3390/mi12080871
Chicago/Turabian StyleNagamine, Eric K., Kenneth W. Burgi, and Samuel D. Butler. 2021. "Beam Formation and Vernier Steering Off of a Rough Surface" Micromachines 12, no. 8: 871. https://doi.org/10.3390/mi12080871
APA StyleNagamine, E. K., Burgi, K. W., & Butler, S. D. (2021). Beam Formation and Vernier Steering Off of a Rough Surface. Micromachines, 12(8), 871. https://doi.org/10.3390/mi12080871