
Structural Design and Optimization of a Resonant Micro-Accelerometer Based on Electrostatic Stiffness by an Improved Differential Evolution Algorithm


Abstract
:1. Introduction
2. Structural Design of a Resonant Micro-Accelerometer Based on Electrostatic Stiffness
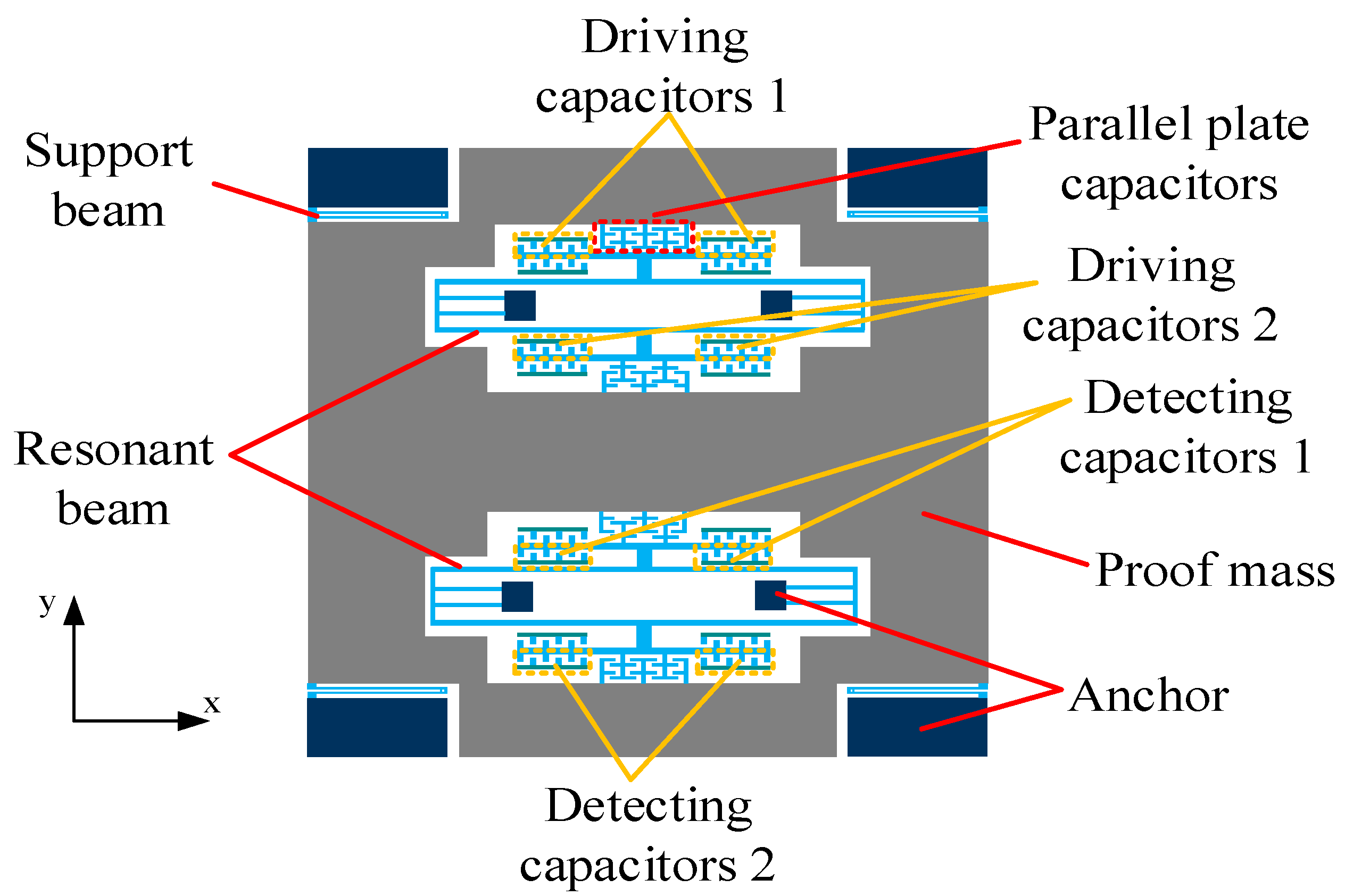
2.1. Overall Structure Design
2.2. Theoretical Analysis
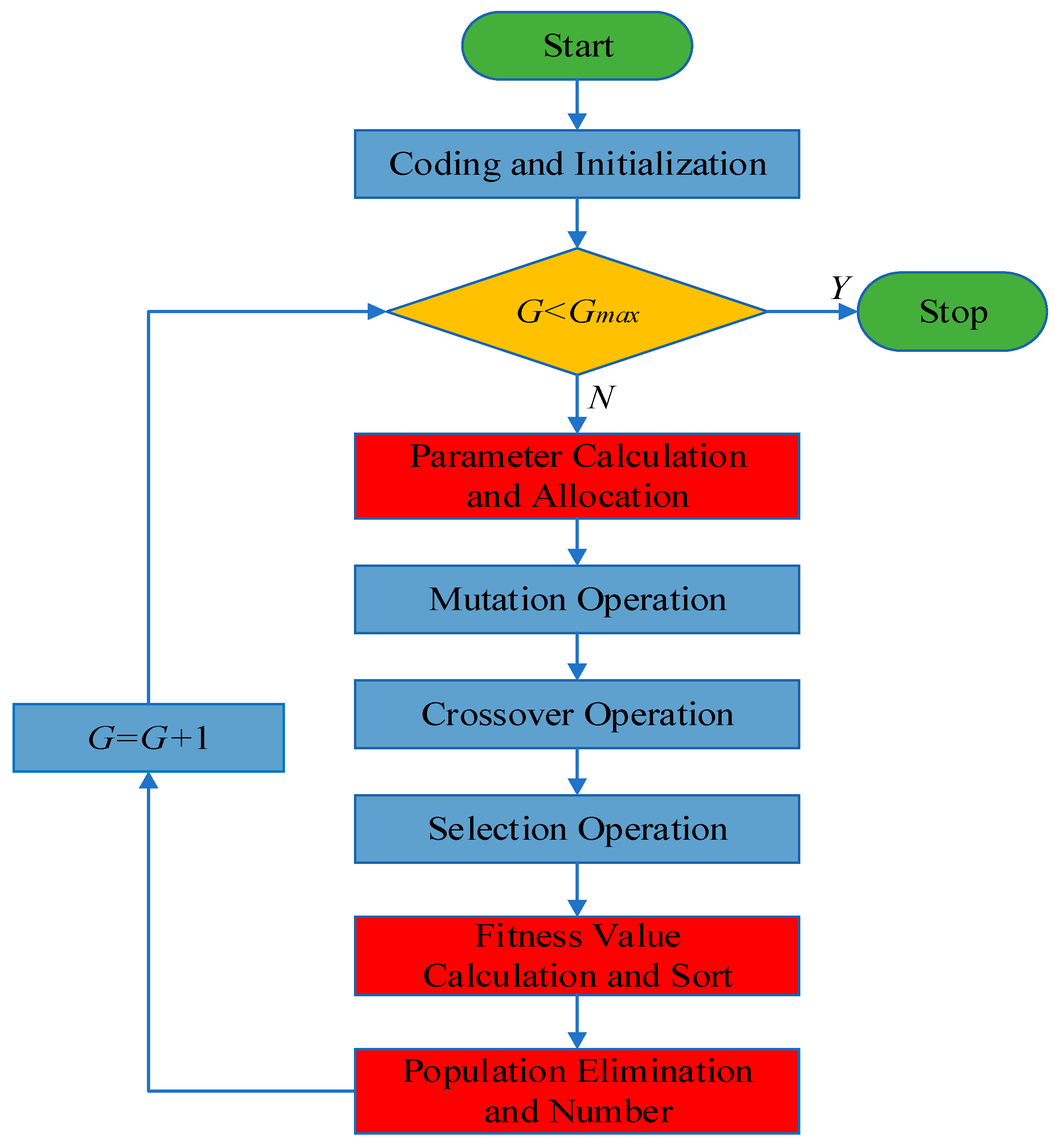
3. Structural Optimization Design by the Improved Differential Evolution Algorithm
3.1. Optimization Objectives
3.2. Standard DE
3.2.1. Initialization
3.2.2. Mutation Operation
3.2.3. Crossover Operation
3.2.4. Selection Operation
3.3. Improved Differential Evolution Algorithm
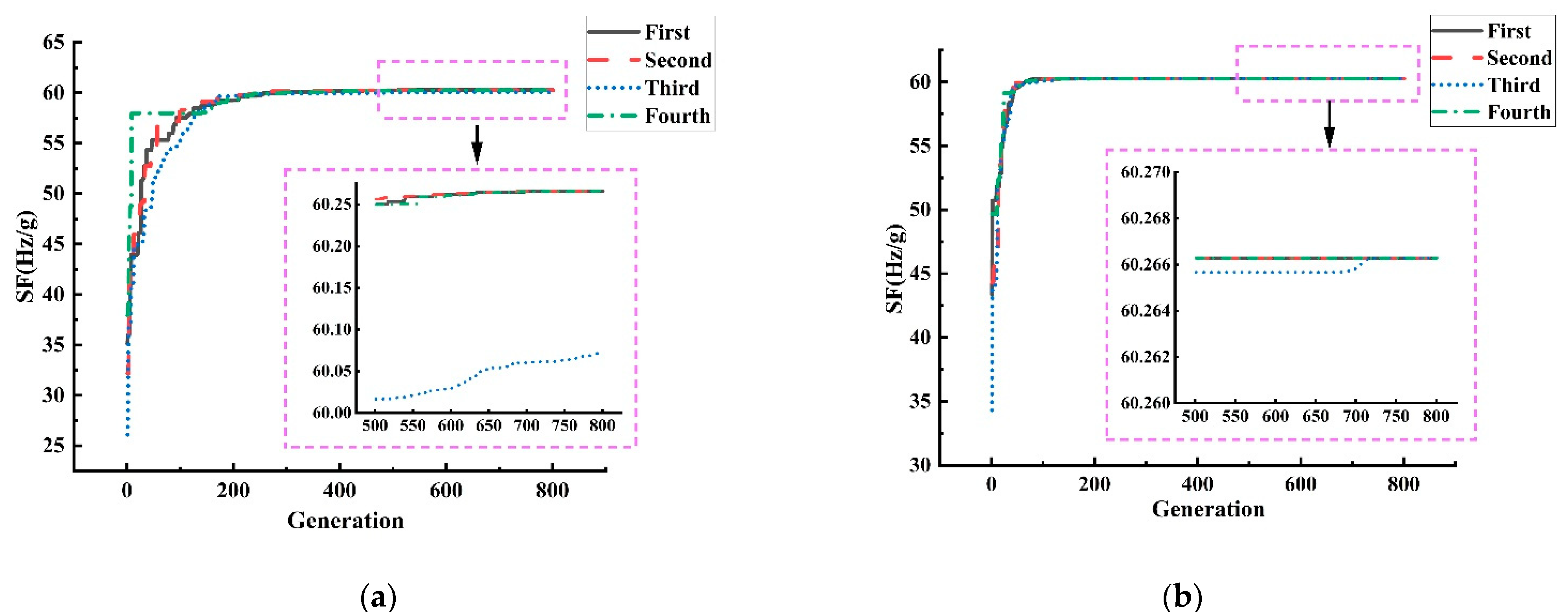
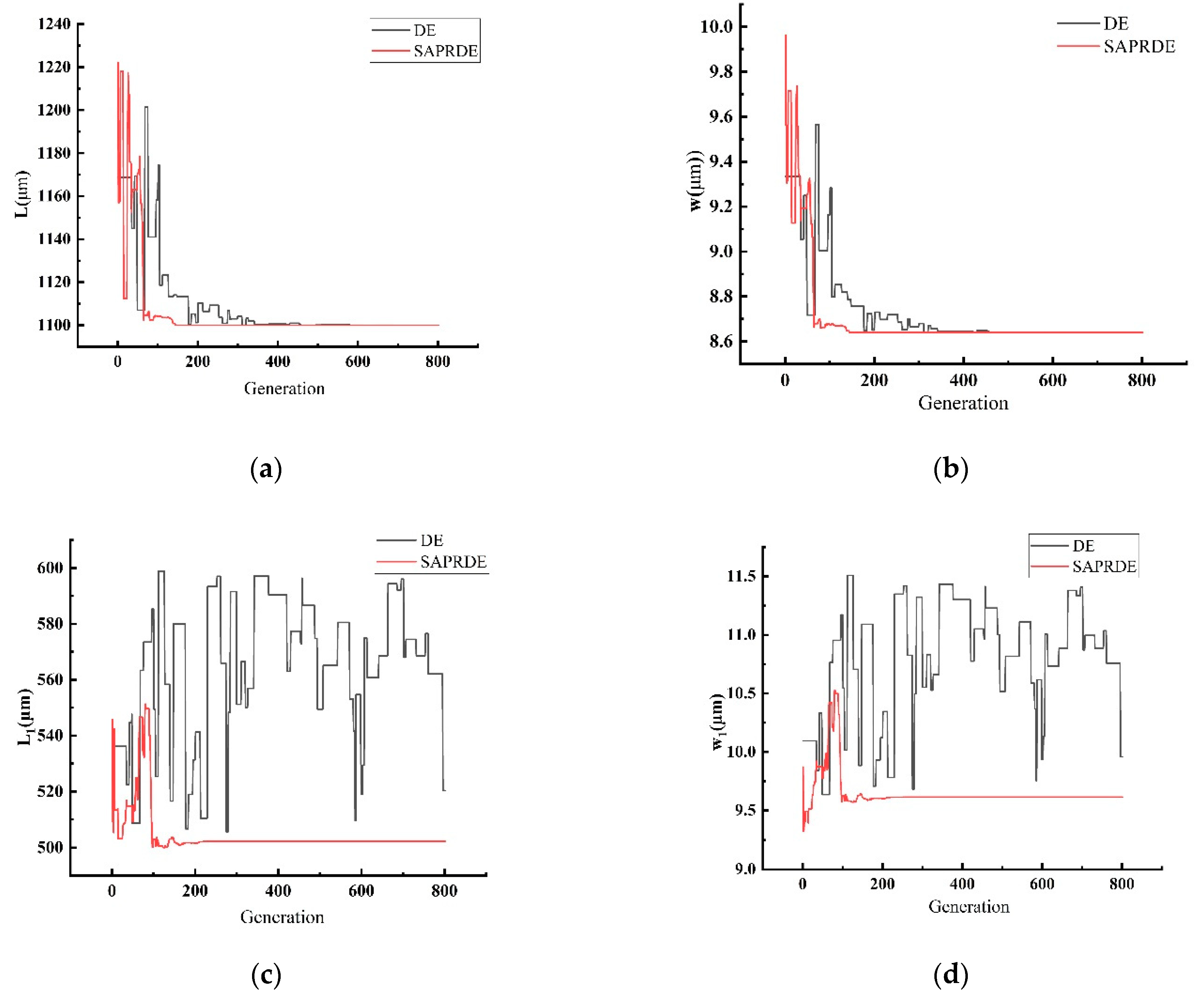
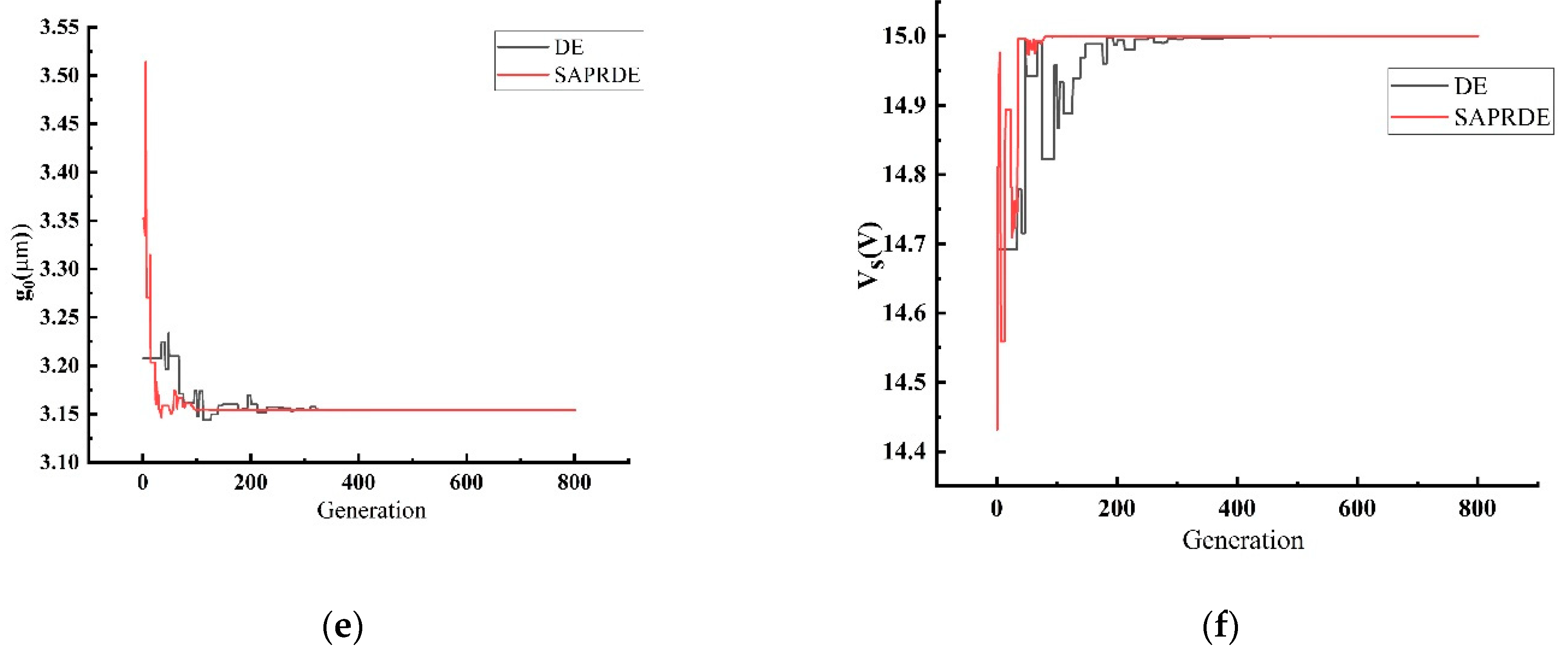
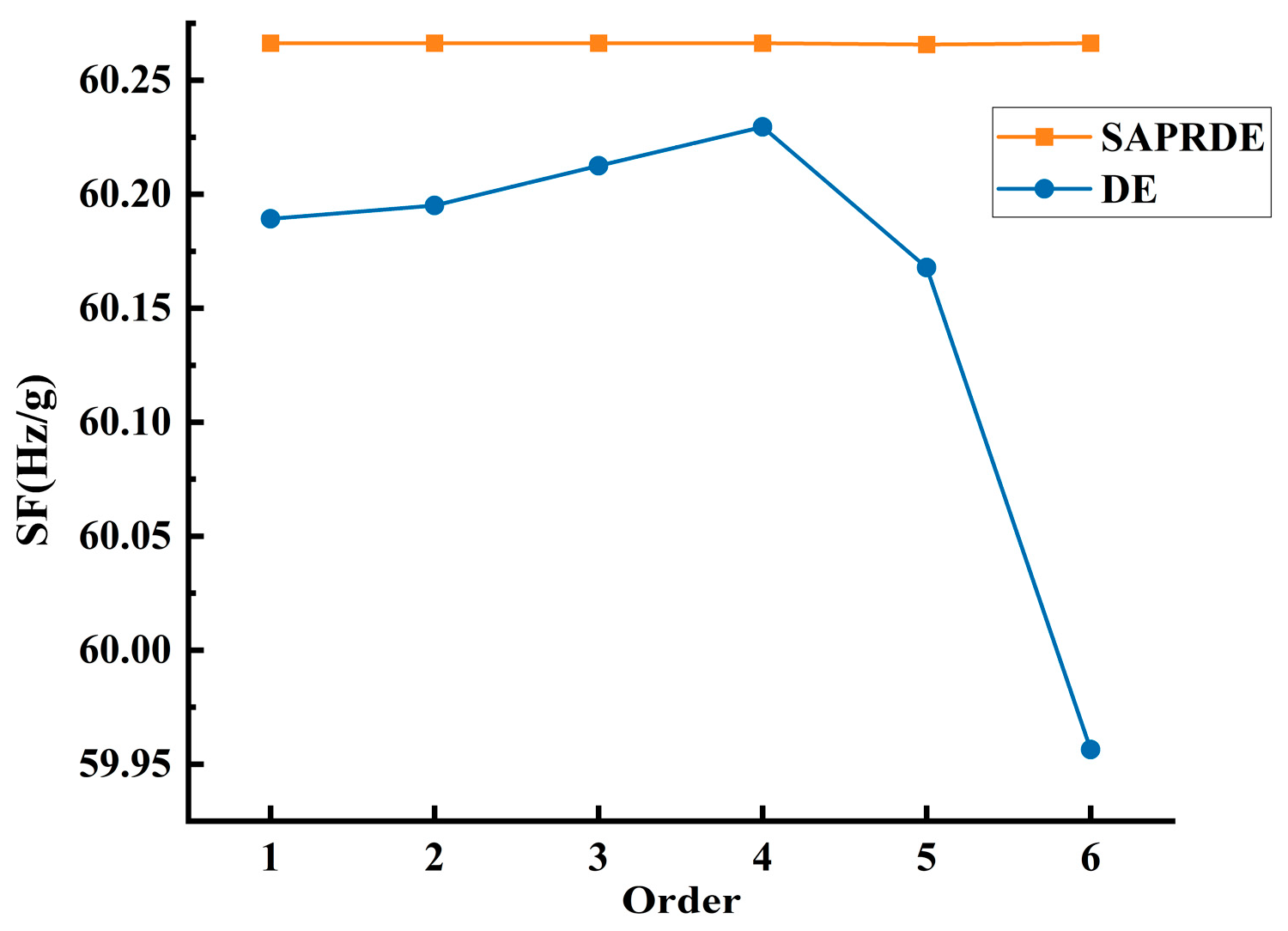
3.4. Optimization Results
4. Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Furubayashi, Y.; Oshima, T.; Yamawaki, T.; Watanabe, K.; Mori, K.; Mori, N.; Matsumoto, A.; Kamada, Y.; Isobe, A.; Sekiguchi, T. A 22-ng/√Hz 17-mW Capacitive MEMS Accelerometer with Electrically Separated Mass Structure and Digital Noise-Reduction Techniques. IEEE J. Solid-State Circuits 2020, 55, 2539–2552. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Y.; Zhang, W. Design and Analysis of MEMS Biaxial Coupled Resonance Accelerometer. In Proceedings of the 2021 IEEE 16th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Xiamen, China, 25–29 April 2021; pp. 1867–1870. [Google Scholar]
- Edalatfar, F.; Hajhashemi, S.; Yaghootkar, B.; Bahreyni, B. Dual mode resonant capacitive MEMS accelerometer. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 February 2016; pp. 97–100. [Google Scholar]
- Todi, A.; Mansoorzare, H.; Moradian, S.; Abdolvand, R. High Frequency Thin-Film Piezoelectric Resonant Micro-Accelerometers with A Capacitive Mass-Spring Transducer. In Proceedings of the 2020 IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020; pp. 1–4. [Google Scholar]
- Park, B.; Lee, S.; Han, K.; Yu, M.-J.; Chang, B. Response characteristics of a MEMS resonant accelerometer to external acoustic excitation. In Proceedings of the 2016 IEEE Sensors, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Seok, S.; Chun, K. Inertial-grade in-plane resonant silicon accelerometer. Electron. Lett. 2006, 42, 1092–1093. [Google Scholar] [CrossRef]
- Lee, B.-L.; Oh, C.-h.; Lee, S.; Oh, Y.-S.; Chun, K.-J. A vacuum packaged differential resonant accelerometer using gap sensitive electrostatic stiffness changing effect. In Proceedings of the IEEE Thirteenth Annual International Conference on Micro Electro Mechanical Systems (Cat. No. 00CH36308), Miyazaki, Japan, 23–27 January 2000; pp. 352–357. [Google Scholar]
- Kim, H.C.; Seok, S.; Kim, I.; Choi, S.-D.; Chun, K. Inertial-grade out-of-plane and in-plane differential resonant silicon accelerometers (DRXLs). In Proceedings of the 13th International Conference on Solid-State Sensors, Actuators and Microsystems, 2005, Digest of Technical Papers, TRANSDUCERS’05, Seoul, Korea, 5–9 June 2005; pp. 172–175. [Google Scholar]
- Comi, C.; Corigliano, A.; Langfelder, G.; Zega, V.; Zerbini, S. Sensitivity and temperature behavior of a novel z-axis differential resonant micro accelerometer. J. Micromech. Microeng. 2016, 26, 035006. [Google Scholar] [CrossRef]
- Yang, B.; Dai, B.; Zhao, H. The Design and Simulation of a New Z-Axis Resonant Micro-Accelerometer Based on Electrostatic Stiffness. In Advanced Materials Research; Trans Tech Publications: Freienbach, Switzerland, 2013; pp. 478–483. [Google Scholar]
- Seok, S.; Kim, H.; Chun, K. An inertial-grade laterally-driven MEMS differential resonant accelerometer. In Proceedings of the SENSORS, 2004 IEEE, Vienna, Austria, 24–27 October 2004; pp. 654–657. [Google Scholar]
- Liu, H.; Zhang, F.T.; He, X.; Su, W.; Zhang, F. Structure design and fabrication for resonant accelerometer based on electrostatic stiffness. J. Chongqing Univ. 2011, 34, 36–42. [Google Scholar]
- Liu, H. Research on Micro Resonant Accelerometers Based on Electrostatic Stiffness; Chongqing University: Chongqing, China, 2011. [Google Scholar]
- Zhang, F.; He, X.; Shi, Z.; Zhou, W. Structure design and fabrication of silicon resonant micro-accelerometer based on electrostatic rigidity. In Proceedings of the World Congress on Engineering, London, UK, 1–3 July 2009. [Google Scholar]
- Zhang, F.; Shi, Z.; He, X.; Liu, H. Structure Stability of Micro Silicon Resonant Acceleration Sensors Based on Electrostatic Rigidity. MEMS Device Technol. 2010, 47, 770–775. [Google Scholar]
- Zhou, W.; He, X.; Su, W.; Li, B.; Chen, L. Design of resonant micro accelerometer based on electrostatic stiffness. Transducer Microsyst. Technol. 2009, 97, 92–94. [Google Scholar]
- Zhou, W. Research of Electromechanical Coupling Characteristics and Key Technologies in Microaccelerometer; Southeast Jiaotong University: Chengdu, China, 2010. [Google Scholar]
- Wang, Y.; Zhang, J.; Yao, Z.; Lin, C.; Zhou, T.; Su, Y.; Zhao, J. A MEMS resonant accelerometer with high performance of temperature based on electrostatic spring softening and continuous ring-down technique. IEEE Sens. J. 2018, 18, 7023–7031. [Google Scholar] [CrossRef]
- Zhai, D.; Liu, D.; He, C.; Guan, R.; Lin, L.; Dong, L.; Zhao, Q.; Yang, Z.; Yan, G. A resonnat accelerometer based on ring-down measurement. In Proceedings of the 2015 Transducers-2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 1125–1128. [Google Scholar]
- Trusov, A.A.; Zotov, S.A.; Simon, B.R.; Shkel, A.M. Silicon accelerometer with differential frequency modulation and continuous self-calibration. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 29–32. [Google Scholar]
- Pei, R.; Wang, X.; Gao, X.; Yu, J. Optimization design technique for key structure of quartz vibrating-beam accelerometer. J. Harbin Inst. Technol. 2012, 44, 129–132. [Google Scholar]
- Wang, Y.; Zhang, J.; Xia, Y.; Li, P. Optimization of supporting beams of piezoelectric omnidirectional accelerometer under stress constraint. Opt. Precis. Eng. 2020, 28, 1751–1760. [Google Scholar]
- Wang, C. Design and Optimization of the Subwavelength Gratings and Compliant Beams for Hign Precision MEMS Accelerometers; Zhejiang University: Hangzhou, China, 2018. [Google Scholar]
- Pak, M.; Fernandez, F.V.; Dundar, G. Optimization of a MEMS accelerometer using a multiobjective evolutionary algorithm. In Proceedings of the 2017 14th International Conference on Synthesis, Modeling, Analysis and Simulation Methods and Applications to Circuit Design (SMACD), Giardini Naxos, Italy, 12–15 June 2017; pp. 1–4. [Google Scholar]
- Zhang, J.; Shi, Y.; Zhao, R.; Wang, Y.; Guo, C.; Zhang, T. Miniaturization Design of High-Range Accelerometer Based on Multi-Objective Optimization. Chin. J. Sens. Actuators 2021, 34, 1152–1157. [Google Scholar]
- Qin, Y. Structural Design and Analysis of Electrostatic Stiffness Resonant Micro-Accelerometer; Southeast University: Nanjing, China, 2021. [Google Scholar]
- Chen, W. Structure Design and Analysis of Micromechnical Silicon Resonant Accelerometer; Southeast University: Nanjing, China, 2012. [Google Scholar]
- Nielson, G.N.; Barbastathis, G. Dynamic pull-in of parallel-plate and torsional electrostatic MEMS actuators. J. Microelectromech. Syst. 2006, 15, 811–821. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Price, K.V. Differential evolution vs. the functions of the 2/sup nd/ICEO. In Proceedings of the 1997 IEEE International Conference on Evolutionary Computation (ICEC’97), Indianapolis, IN, USA, 13–16 April 1997; pp. 153–157. [Google Scholar]
- Akinsolu, M.O.; Liu, B.; Lazaridis, P.I.; Mistry, K.K.; Mognaschi, M.E.; Di Barba, P.; Zaharis, Z.D. Efficient design optimization of high-performance mems based on a surrogate-assisted self-adaptive differential evolution. IEEE Access 2020, 8, 80256–80268. [Google Scholar] [CrossRef]
- Das, S.; Konar, A.; Chakraborty, U.K. Two improved differential evolution schemes for faster global search. In Proceedings of the 7th Annual Conference on Genetic and Evolutionary Computation, Washington, DC, USA, 25–29 June 2005; pp. 991–998. [Google Scholar]
- Mousavirad, S.J.; Rahnamayan, S. Enhancing SHADE and L-SHADE Algorithms Using Ordered Mutation. In Proceedings of the 2020 IEEE Symposium Series on Computational Intelligence (SSCI), Canberra, ACT, Australia, 1–4 December 2020; pp. 337–344. [Google Scholar]
- Guo, S.-M.; Yang, C.-C.; Hsu, P.-H.; Tsai, J.S.-H. Improving differential evolution with a successful-parent-selecting framework. IEEE Trans. Evol. Comput. 2014, 19, 717–730. [Google Scholar] [CrossRef]
- Awad, N.H.; Ali, M.Z.; Suganthan, P.N.; Reynolds, R.G. An ensemble sinusoidal parameter adaptation incorporated with L-SHADE for solving CEC2014 benchmark problems. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 2958–2965. [Google Scholar]
- Tanabe, R.; Fukunaga, A.S. Improving the search performance of SHADE using linear population size reduction. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 1658–1665. [Google Scholar]
- Liu, J.; Lampinen, J. A fuzzy adaptive differential evolution algorithm. Soft Comput. 2005, 9, 448–462. [Google Scholar] [CrossRef]
- Qin, A.K.; Huang, V.L.; Suganthan, P.N. Differential evolution algorithm with strategy adaptation for global numerical optimization. IEEE Trans. Evol. Comput. 2008, 13, 398–417. [Google Scholar] [CrossRef]
- Fan, Q.; Zhang, Y. Self-adaptive differential evolution algorithm with crossover strategies adaptation and its application in parameter estimation. Chemom. Intell. Lab. Syst. 2016, 151, 164–171. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.; Song, Y.; Zhao, H. Differential evolution algorithm with wavelet basis function and optimal mutation strategy for complex optimization problem. Appl. Soft Comput. 2021, 100, 106724. [Google Scholar] [CrossRef]
- Takahama, T.; Sakai, S. Efficient constrained optimization by the ε constrained adaptive differential evolution. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation (CEC), Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values | Units |
|---|---|---|
| Structural layer thickness | 60 | μm |
| Driving comb length | 20 | μm |
| Driving comb width | 4 | μm |
| Detecting comb length | 20 | μm |
| Detecting comb width | 4 | μm |
| Parallel plate capacitor length | 25 | μm |
| Parallel plate capacitor width | 4 | μm |
| Comb frame length | 700 | μm |
| Comb frame width | 20 | μm |
| Distance between two resonant beams | 100 | μm |
| Accelerometer Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Upper resonator | 24.64 | 25.67 | 24.77 | 25.93 | 25.57 | 25.63 | 25.89 | 25.36 | 25.41 | 25.23 |
| Lower resonator | 24.69 | 25.78 | 24.86 | 25.98 | 25.53 | 25.64 | 25.87 | 25.43 | 25.48 | 25.29 |
| Accelerometer Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Scale factor (Hz/g) | 54.23 | 55.46 | 55.94 | 56.36 | 58.17 |
| Error (%) | 10.02 | 7.98 | 7.18 | 6.49 | 3.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Li, Q.; Qin, Y.; Ding, X.; Zhang, M.; Zhao, L. Structural Design and Optimization of a Resonant Micro-Accelerometer Based on Electrostatic Stiffness by an Improved Differential Evolution Algorithm. Micromachines 2022, 13, 38. https://doi.org/10.3390/mi13010038
Huang L, Li Q, Qin Y, Ding X, Zhang M, Zhao L. Structural Design and Optimization of a Resonant Micro-Accelerometer Based on Electrostatic Stiffness by an Improved Differential Evolution Algorithm. Micromachines. 2022; 13(1):38. https://doi.org/10.3390/mi13010038
Chicago/Turabian StyleHuang, Libin, Qike Li, Yan Qin, Xukai Ding, Meimei Zhang, and Liye Zhao. 2022. "Structural Design and Optimization of a Resonant Micro-Accelerometer Based on Electrostatic Stiffness by an Improved Differential Evolution Algorithm" Micromachines 13, no. 1: 38. https://doi.org/10.3390/mi13010038
APA StyleHuang, L., Li, Q., Qin, Y., Ding, X., Zhang, M., & Zhao, L. (2022). Structural Design and Optimization of a Resonant Micro-Accelerometer Based on Electrostatic Stiffness by an Improved Differential Evolution Algorithm. Micromachines, 13(1), 38. https://doi.org/10.3390/mi13010038