
A Substructure Condensed Approach for Kinetostatic Modeling of Compliant Mechanisms with Complex Topology

Abstract
:1. Introduction
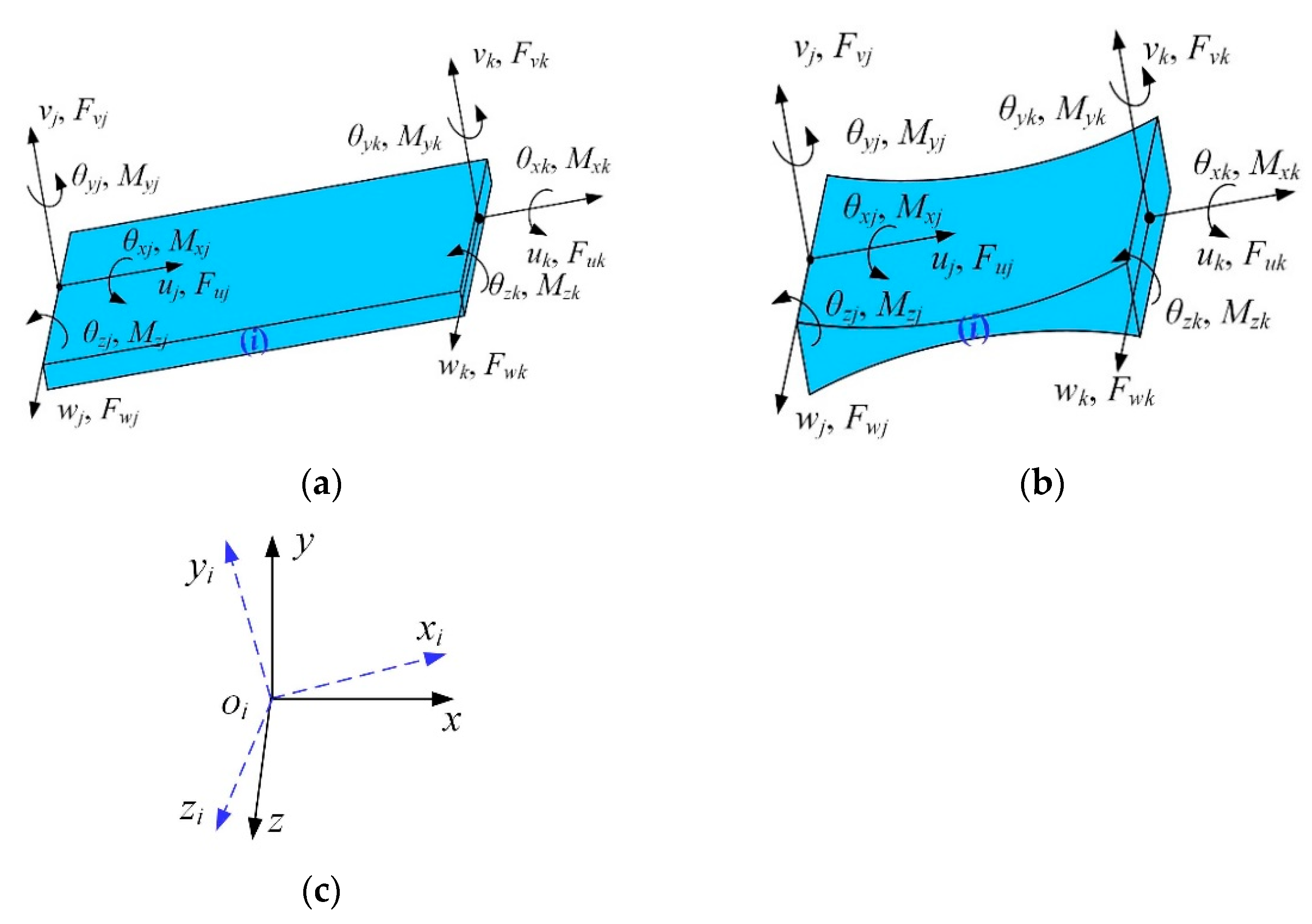
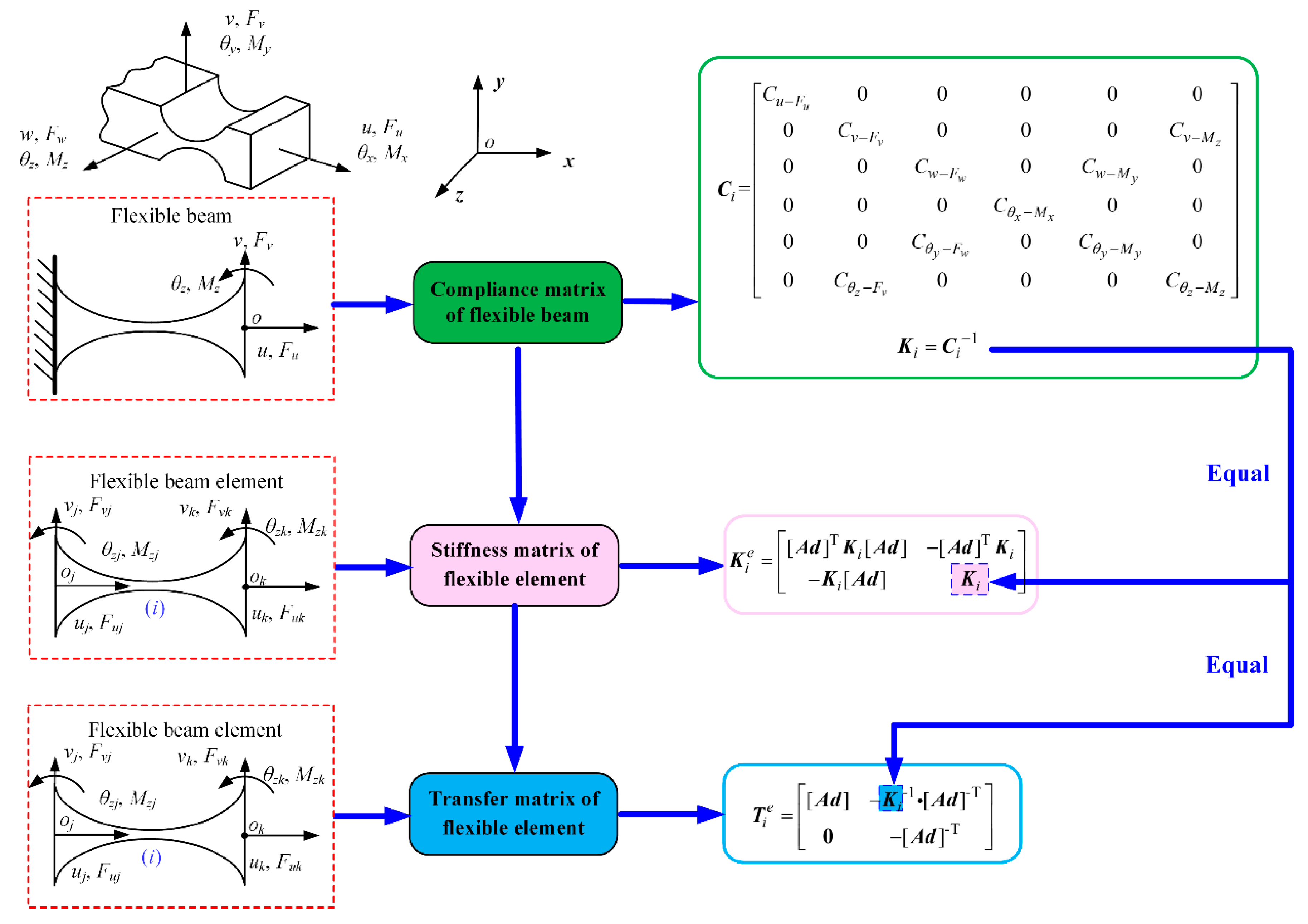
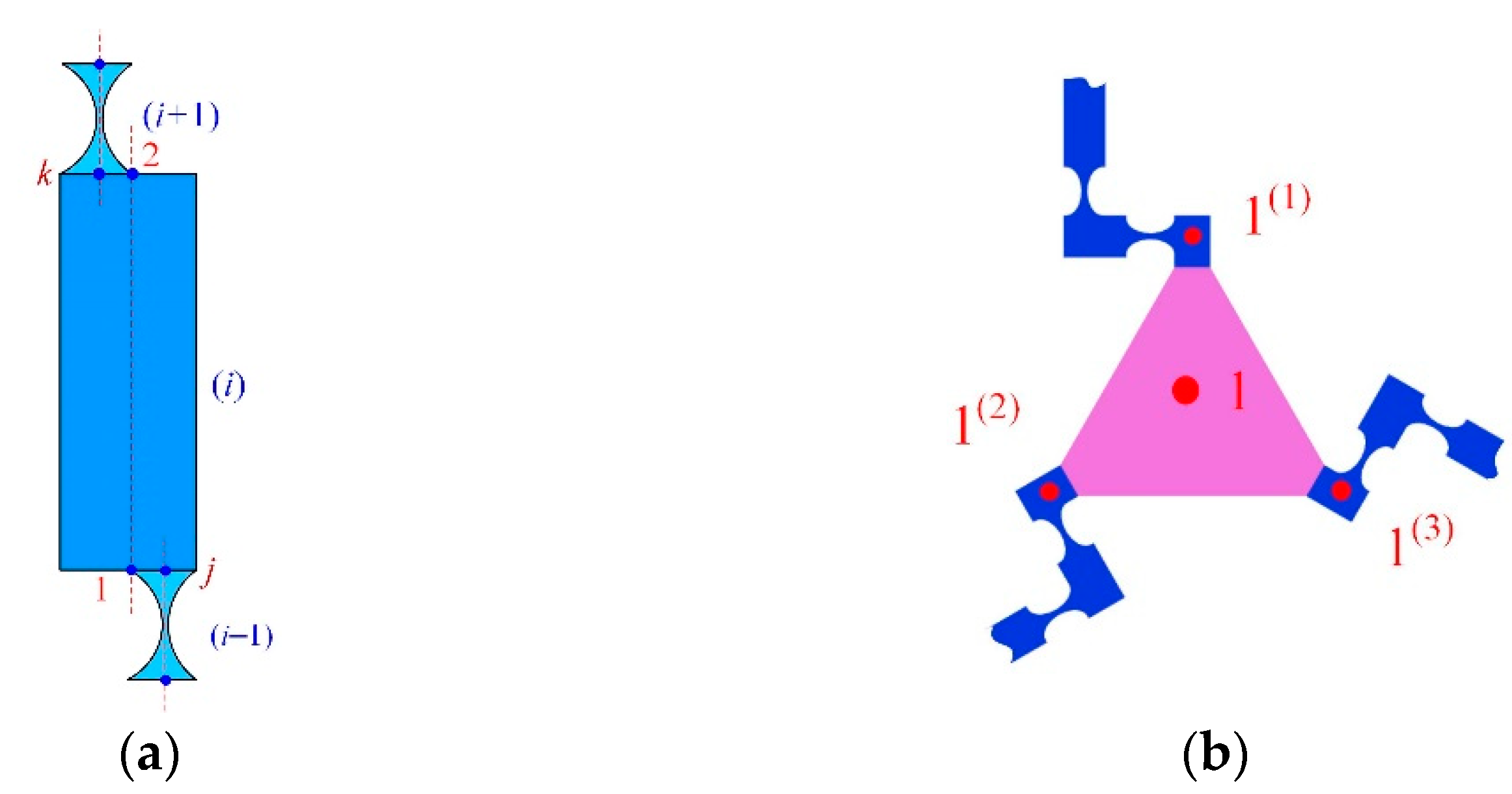
2. General Expression of Element Transfer Matrix for the Common Flexible Beam Element
3. Kinetostatic Modeling Based on the Substructure Condensed Approach
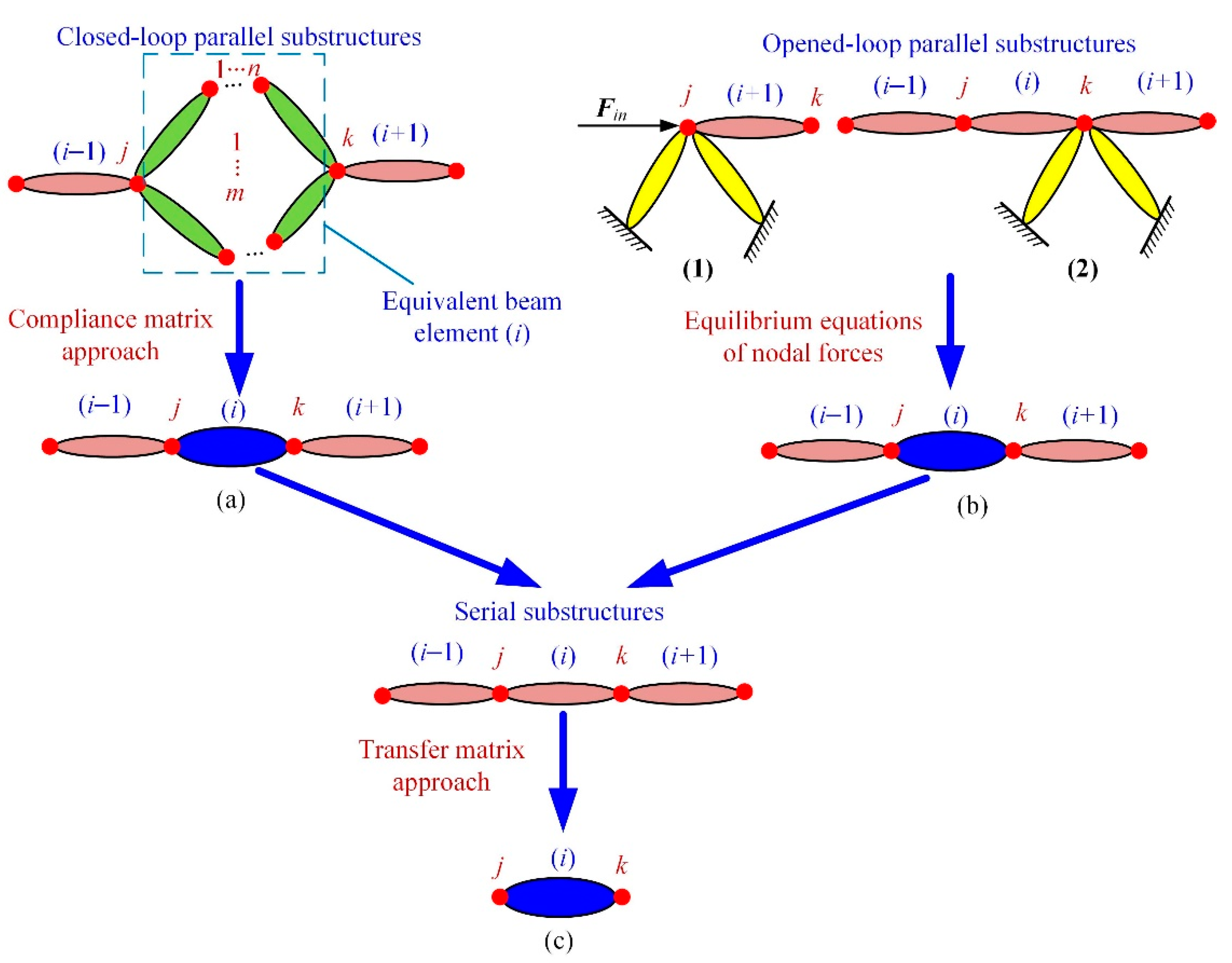
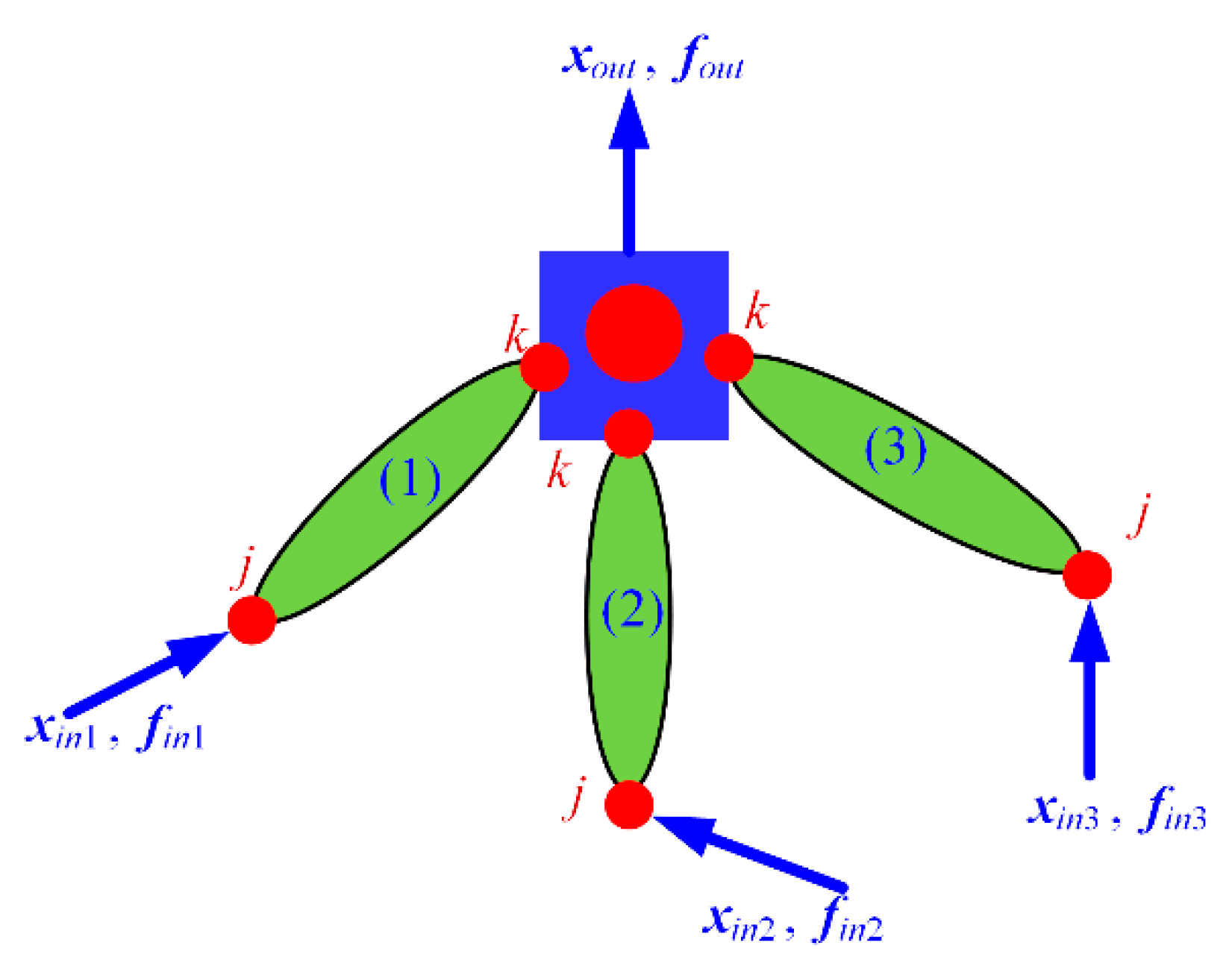
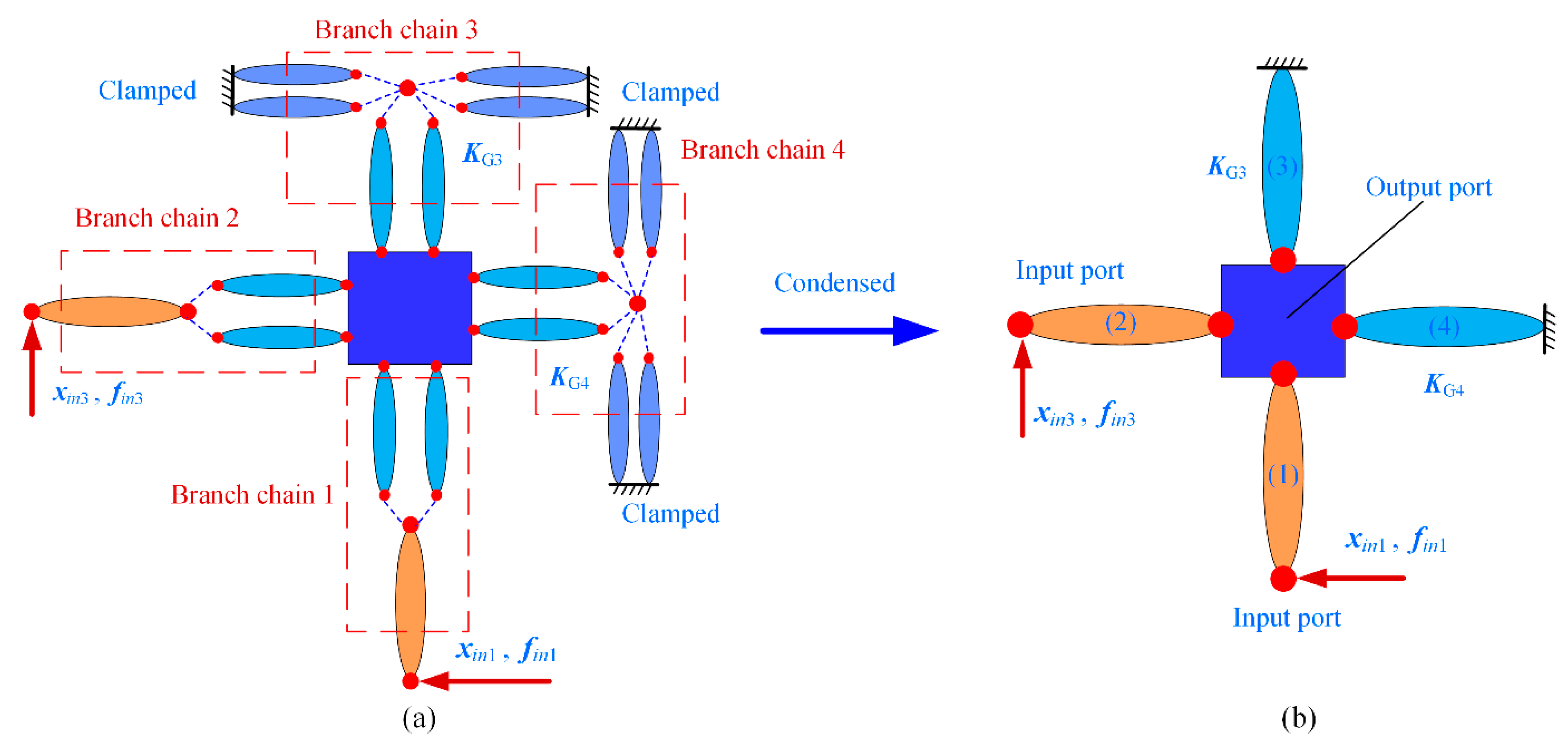
3.1. Transfer Matrices for Three Types of Substructures
3.2. Establishing Kinetostatic Model
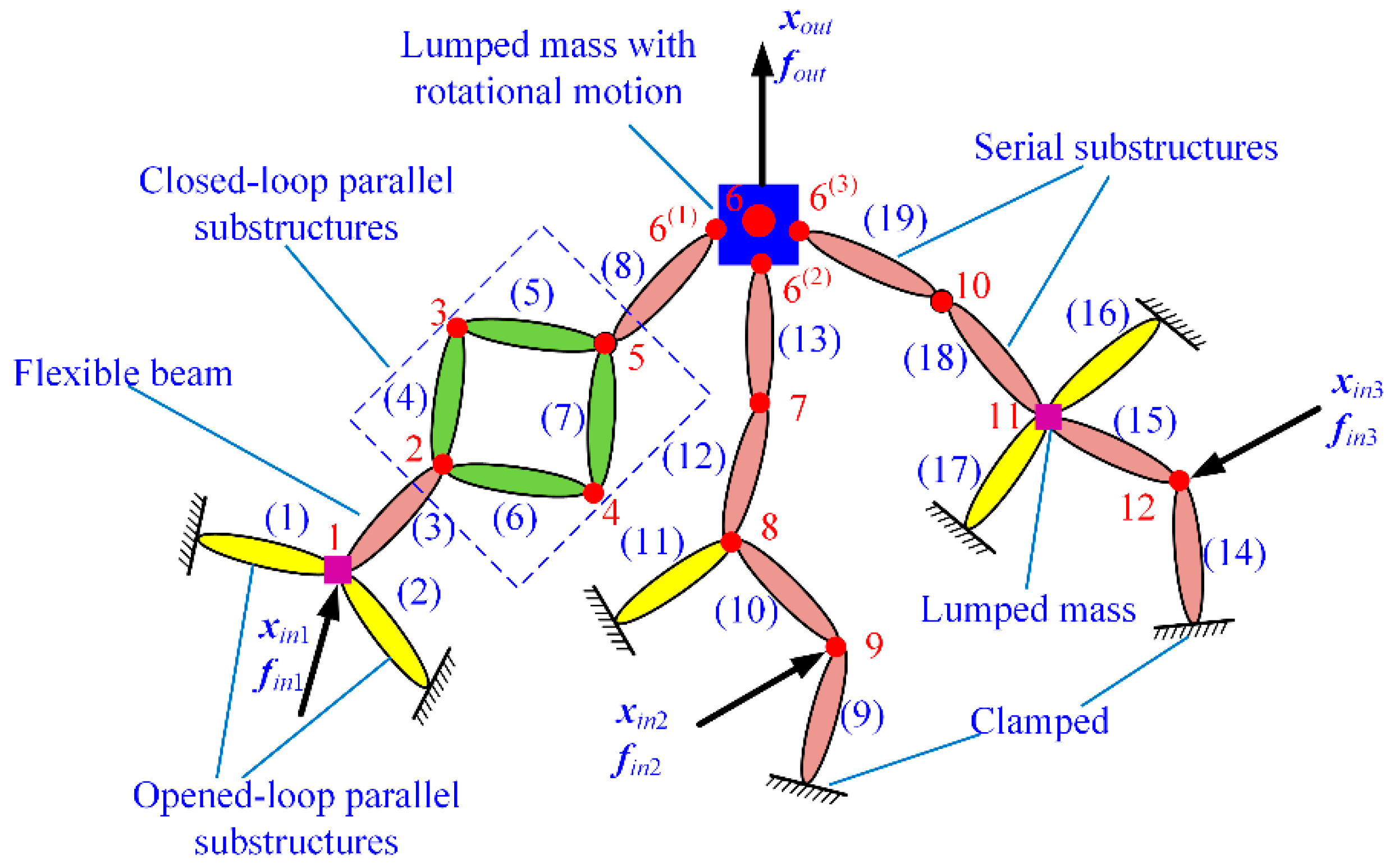
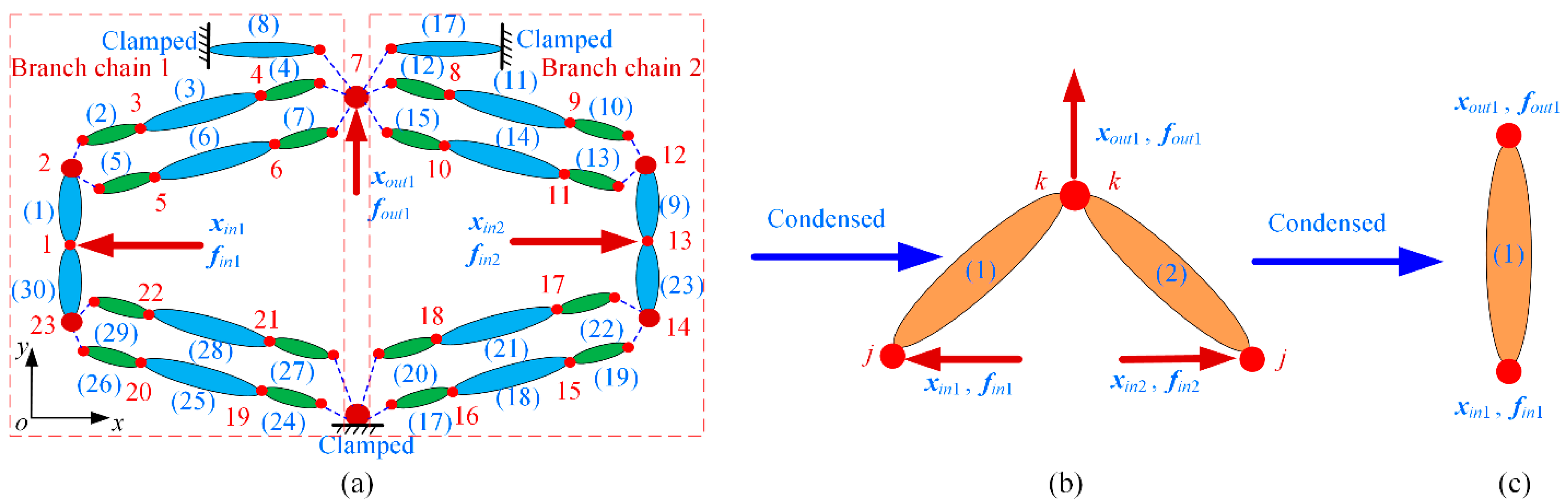
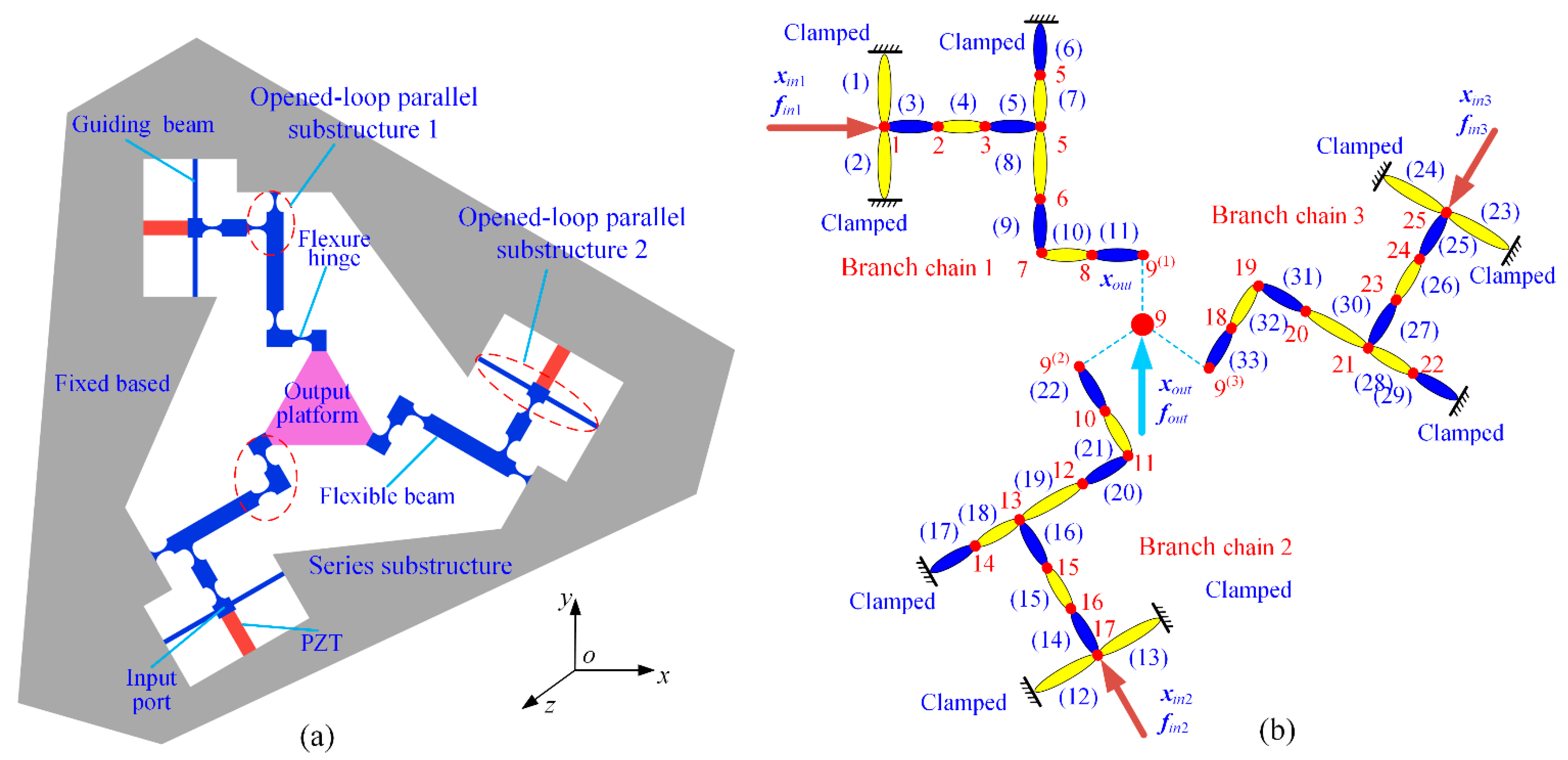
3.2.1. Discretizing and Numbering
3.2.2. Calculating Transfer Matrices of Flexible Beams and Lumped Mass
3.2.3. Calculating the Transfer Matrix of Each Branch Chain
3.2.4. Establishing the Kinetostatic Model of the Compliant Mechanism
3.2.5. Calculating the Kinetostatic Performances of the Compliant Mechanism
- (1)
- When external loads are applied to input nodes, i.e., fini≠0 (i = 1,2,3) and fout = 0
- (2)
- When the external load is applied to the output node, i.e., fout≠0 and fini = 0 (i = 1,2,3)
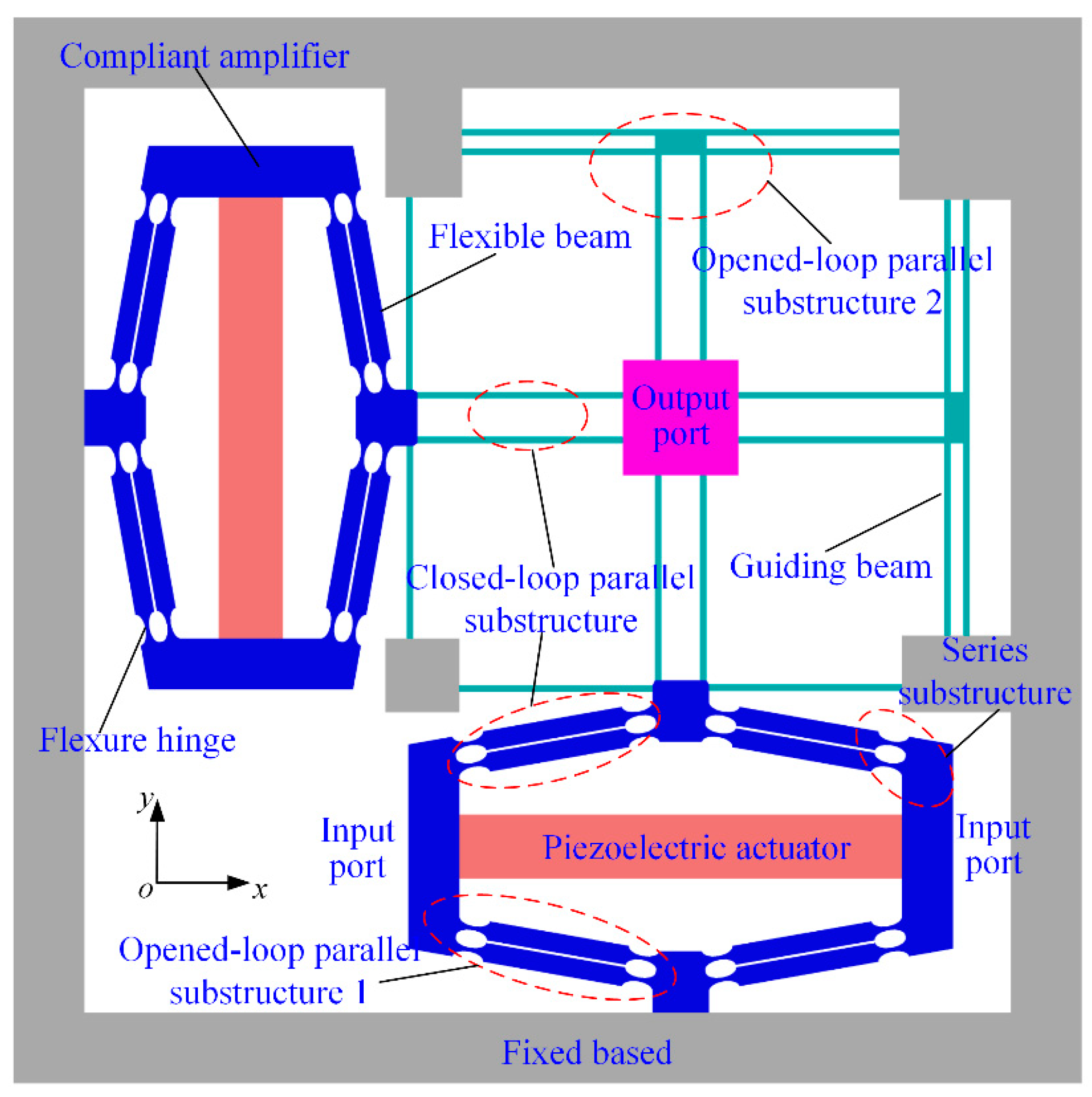
4. Verification and Discussion
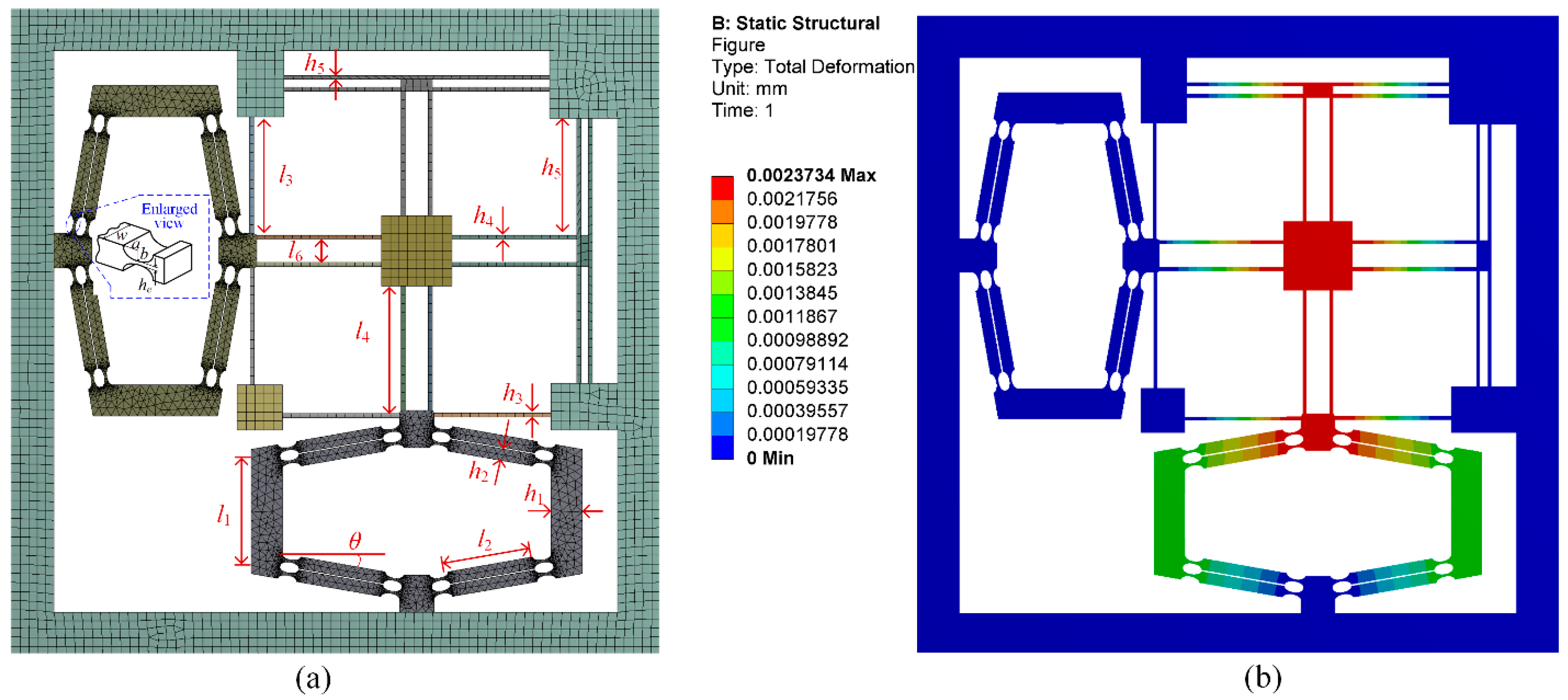
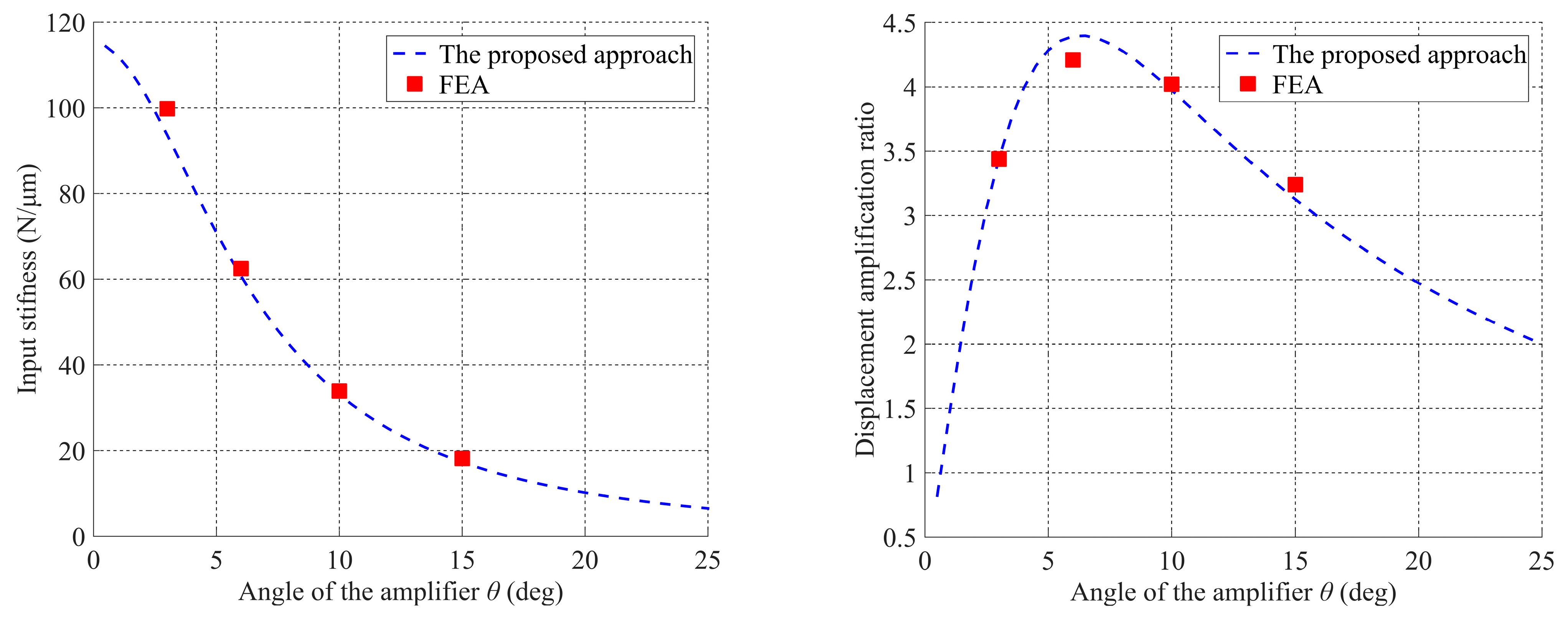
4.1. First Example
4.2. Second Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Howell, L.L. Compliant Mechanisms; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Chen, G.; Han, Q.; Jin, K. A fully compliant tristable mechanism employing both tensural and compresural segments. J. Mech. Robot. 2019, 12, 011003. [Google Scholar] [CrossRef]
- Valentini, P.P.; Pennestrì, E. Compliant four-bar linkage synthesis with second-order flexure hinge approximation. Mech. Mach. Theory 2018, 128, 225–233. [Google Scholar] [CrossRef]
- Valentini, P.P.; Cirelli, M.; Pennestrì, E. Second-order approximation pseudo-rigid model of flexure hinge with parabolic variable thickness. Mech. Mach. Theory 2019, 136, 178–189. [Google Scholar] [CrossRef]
- Liao, S.; Ding, B.; Li, Y. Design, assembly, and simulation of flexure-based modular micro-positioning stages. Machines 2022, 10, 421. [Google Scholar] [CrossRef]
- Xiao, X.; Xi, R.; Li, Y.; Tang, Y.; Ding, B.; Ren, H.; Meng, M. Design and control of a novel electromagnetic actuated 3-DoFs micropositioner. Microsyst. Technol. 2021, 27, 3763–3772. [Google Scholar] [CrossRef]
- Yang, M.; Du, Z.; Chen, F.; Dong, W.; Zhang, D. Kinetostatic modelling of a 3-PRR planar compliant parallel manipulator with flexure pivots. Precis. Eng. 2017, 48, 323–330. [Google Scholar] [CrossRef]
- Shao, Z.; Wu, S.; Wu, J.; Fu, H. A novel 5-DOF high-precision compliant parallel mechanism for large-aperture grating tiling. Mech. Sci. 2017, 8, 349–358. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; To, S.; Zhang, S. Theoretical and experimental investigation on the novel end-fly-cutting-servo diamond machining of hierarchical micro-nanostructures. Int. J. Mach. Tools Manuf. 2015, 94, 15–25. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, Q. Design of a new passive end-effector based on constant-force mechanism for robotic polishing. Robot. Comput.-Integr. Manuf. 2022, 74, 102278. [Google Scholar] [CrossRef]
- Ding, B.; Zhao, J.; Li, Y. Design of a spatial constant-force end-effector for polishing/deburring operations. Int. J. Adv. Manuf. Technol. 2021, 116, 3507–3515. [Google Scholar] [CrossRef]
- Ding, B.; Li, X.; Li, Y. Configuration design and experimental verification of a variable constant-force compliant mechanism. Robotica 2022, 40, 3463–3475. [Google Scholar] [CrossRef]
- Ursi, P.; Rossi, A.; Botta, F.; Belfiore, N.P. Analytical Modeling of a New Compliant Microsystem for Atherectomy Operations. Micromachines 2022, 13, 1094. [Google Scholar] [PubMed]
- Shi, H.; Su, H.J.; Dagalakis, N. A stiffness model for control and analysis of a MEMS hexapod nanopositioner. Mech. Mach. Theory 2014, 80, 246–264. [Google Scholar] [CrossRef]
- Su, H.J.; Shi, H.; Yu, J. A symbolic formulation for analytical compliance analysis and synthesis of flexure mechanisms. J. Mech. Des. Trans. ASME 2012, 134, 051009. [Google Scholar] [CrossRef] [Green Version]
- Ling, M.; Howell, L.L.; Cao, J.; Chen, G. Kinetostatic and dynamic modeling of flexure-based compliant mechanisms: A survey. Appl. Mech. Rev. 2019, 72, 030802. [Google Scholar] [CrossRef] [Green Version]
- Ling, M.; Cao, J.; Jiang, Z.; Lin, J. Modular kinematics and statics modeling for precision positioning stage. Mech. Mach. Theory 2017, 107, 274–282. [Google Scholar] [CrossRef]
- Ling, M.; Cao, J.; Zeng, M.; Lin, J.; Inman, D.J. Enhanced mathematical modeling of the displacement amplification ratio for piezoelectric compliant mechanisms. Smart Mater. Struct. 2016, 25, 075022. [Google Scholar] [CrossRef]
- Lobontiu, N.; Garcia, E. Analytical model of displacement amplification and stiffness optimization for a class of flexure-based compliant mechanisms. Comput. Struct. 2003, 81, 2797–2810. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, X.; Li, H.; Wei, J.; Fatikow, S. Nonlinear analysis and optimal design of a novel piezoelectric-driven compliant microgripper. Mech. Mach. Theory 2017, 118, 32–52. [Google Scholar] [CrossRef]
- Zhu, Z.; To, S.; le Zhu, W.; Li, Y.; Huang, P. Optimum Design of a Piezo-Actuated Triaxial Compliant Mechanism for Nanocutting. IEEE Trans. Ind. Electron. 2018, 65, 6362–6371. [Google Scholar] [CrossRef]
- Li, Y.; Huang, J.; Tang, H. A compliant parallel XY micromotion stage with complete kinematic decoupling. IEEE Trans. Autom. Sci. Eng. 2012, 9, 538–553. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, T.; Wang, L. Stiffness modeling of compliant parallel mechanisms and applications in the performance analysis of a decoupled parallel compliant stage. Rev. Sci. Instrum. 2015, 86, 095109. [Google Scholar] [CrossRef] [PubMed]
- Ling, M.; Cao, J.; Howell, L.L.; Zeng, M. Kinetostatic modeling of complex compliant mechanisms with serial-parallel substructures: A semi-analytical matrix displacement method. Mech. Mach. Theory 2018, 125, 169–184. [Google Scholar] [CrossRef]
- Ling, M.; Cao, J.; Pehrson, N. Kinetostatic and dynamic analyses of planar compliant mechanisms via a two-port dynamic stiffness model. Precis. Eng. 2019, 57, 149–161. [Google Scholar] [CrossRef]
- Zhu, W.; Rui, X.T. Modeling of a three degrees of freedom piezo-actuated mechanism. Smart Mater. Struct. 2017, 26, 015006. [Google Scholar] [CrossRef]
- Ma, H.W.; Yao, S.M.; Wang, L.Q.; Zhong, Z. Analysis of the displacement amplification ratio of bridge-type flexure hinge. Sens. Actuators A Phys. 2006, 132, 730–736. [Google Scholar] [CrossRef]
- Lobontiu, N.; Paine, J.S.N.; Garcia, E.; Goldfarb, M. Corner-filleted flexure hinges. J. Mech. Des. Trans. ASME 2001, 123, 346–352. [Google Scholar] [CrossRef]
- Shi, R.C.; Dong, W.; Du, Z.J. Design methodology and performance analysis of application-oriented flexure hinges. Rev. Sci. Instrum. 2013, 84, 075005. [Google Scholar] [CrossRef]
- Pham, H.H.; Chen, I.M. Stiffness modeling of flexure parallel mechanism. Precis. Eng. 2005, 29, 467–478. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Design and robust repetitive control of a new parallel-kinematic XY piezostage for micro-nano manipulation. IEEE/ASME Trans. Mechatron. 2012, 17, 1120–1132. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Development and assessment of a novel decoupled XY parallel micropositioning platform. IEEE/ASME Trans. Mechatron. 2010, 15, 125–135. [Google Scholar]
- Noveanu, S.; Lobontiu, N.; Lazaro, J.; Mandru, D. Substructure compliance matrix model of planar branched flexure-hinge mechanisms: Design, testing and characterization of a gripper. Mech. Mach. Theory 2015, 91, 1–20. [Google Scholar] [CrossRef]
- Lobontiu, N. Compliance-based matrix method for modeling the quasi-static response of planar serial flexure-hinge mechanisms. Precis. Eng. 2014, 38, 639–650. [Google Scholar] [CrossRef]
- Wu, S.; Shao, Z.; Su, H.; Fu, H. An energy-based approach for kinetostatic modeling of general compliant mechanisms. Mech. Mach. Theory 2019, 142, 125–135. [Google Scholar] [CrossRef]
- Chen, G.; Liu, X.; Gao, H.; Jia, J. A generalized model for conic flexure hinges. Rev. Sci. Instrum. 2009, 80, 055106. [Google Scholar] [CrossRef]
- Chen, G.; Shao, X.; Huang, X. A new generalized model for elliptical arc flexure hinges. Rev. Sci. Instrum. 2008, 79, 095103. [Google Scholar] [CrossRef]
- Ling, M.; Cao, J.; Jiang, Z.; Lin, J. A semi-analytical modeling method for the static and dynamic analysis of complex compliant mechanism. Precis. Eng. 2018, 52, 64–72. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| l1 (mm) | 14.0 | l4 (mm) | 16 | b (mm) | 0.6 |
| h1 (mm) | 4.0 | h4 (mm) | 0.5 | he (mm) | 0.3 |
| l2 (mm) | 11.0 | l5 (mm) | 15 | w (mm) | 10.0 |
| h2 (mm) | 1.5 | h5 (mm) | 0.5 | θ (deg) | 10.0 |
| l3 (mm) | 15.0 | l6 (mm) | 3.0 | E (GPa) | 200 |
| h3 (mm) | 0.5 | a (mm) | 1.2 | G (GPa) | 77.64 |
| Angle θ (deg) | Kin (N/μm) | R | ||||
|---|---|---|---|---|---|---|
| The Proposed Approach | FEA | Error (%) | The Proposed Approach | FEA | Error (%) | |
| 3 | 93.61 | 99.80 | 6.20 | 3.44 | 3.24 | 6.17 |
| 6 | 60.72 | 62.50 | 2.85 | 4.39 | 4.21 | 4.28 |
| 10 | 33.07 | 33.90 | 2.45 | 3.97 | 4.02 | 1.24 |
| 15 | 17.30 | 18.18 | 4.84 | 3.12 | 3.05 | 2.30 |
| Approaches | fin1 = fin2 = fin3 = 100 N | Elements | |||||||
|---|---|---|---|---|---|---|---|---|---|
| xin1 (μm) | xin2 (μm) | xin3 (μm) | xout (μm/rad) | ||||||
| u | u | v | u | v | u | v | θ | ||
| FEA | 42.5 | −21.4 | 36.9 | −21.4 | −36.9 | 0 | 0 | 0.0116 | 120,000 |
| Reference [24] | 46.3 | −23.1 | 40.1 | −23.2 | −40.1 | 0 | 0 | 0.0130 | 9 |
| Reference [35] | 41.1 | −20.5 | 35.6 | −20.5 | 35.6 | 0 | 0 | 0.0114 | 33 |
| The proposed approach | 41.1 | −20.5 | 35.6 | −20.6 | 35.5 | 0 | 0 | 0.0114 | 3 |
| Error | 3.1% | 4.2% | 3.5% | 4.2% | 3.5% | 0 | 0 | 1.7% | |
| Approaches | fout = [0 N, 50 N, 0 N, 0 N·m, 0 N·m, 1 N·m] | Elements | |||||||
|---|---|---|---|---|---|---|---|---|---|
| xin1 (μm) | xin2 (μm) | xin3 (μm) | xout (μm/rad) | ||||||
| u | u | v | u | v | u | v | θ | ||
| FEA | −47.5 | 10.7 | −18.1 | 22.1 | 39.4 | 0 | 68.4 | 0.0149 | 120,000 |
| The proposed approach | −47.8 | 10.5 | −18.3 | 22.7 | 39.2 | 0 | 68.7 | 0.0150 | 3 |
| Error | 0.6% | 1.9% | 1.1% | 2.7% | 0.5% | 0 | 0.4% | 0.7% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, S.; Shao, Z.; Fu, H. A Substructure Condensed Approach for Kinetostatic Modeling of Compliant Mechanisms with Complex Topology. Micromachines 2022, 13, 1734. https://doi.org/10.3390/mi13101734
Wu S, Shao Z, Fu H. A Substructure Condensed Approach for Kinetostatic Modeling of Compliant Mechanisms with Complex Topology. Micromachines. 2022; 13(10):1734. https://doi.org/10.3390/mi13101734
Chicago/Turabian StyleWu, Shilei, Zhongxi Shao, and Hongya Fu. 2022. "A Substructure Condensed Approach for Kinetostatic Modeling of Compliant Mechanisms with Complex Topology" Micromachines 13, no. 10: 1734. https://doi.org/10.3390/mi13101734
APA StyleWu, S., Shao, Z., & Fu, H. (2022). A Substructure Condensed Approach for Kinetostatic Modeling of Compliant Mechanisms with Complex Topology. Micromachines, 13(10), 1734. https://doi.org/10.3390/mi13101734