
Design of a Capacitive MEMS Accelerometer with Softened Beams


 ,
,
Abstract
:1. Introduction
2. Design
2.1. Stiffness Softening
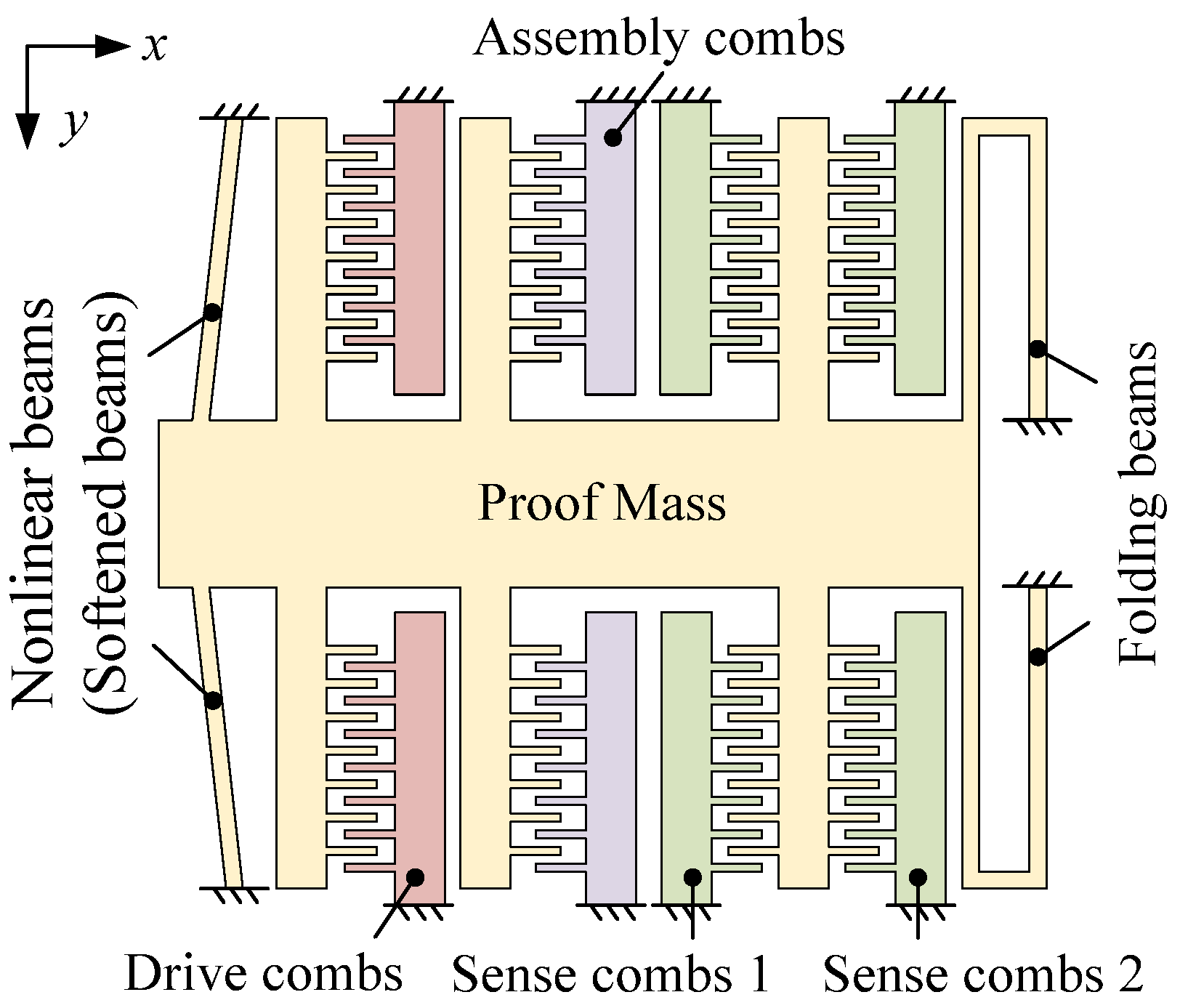
2.2. Accelerometer Design
3. Fabrication
4. Experiment Schemes
4.1. Frequency Response
4.2. Performance Testing
5. Experiment Results
5.1. Resonant Frequency
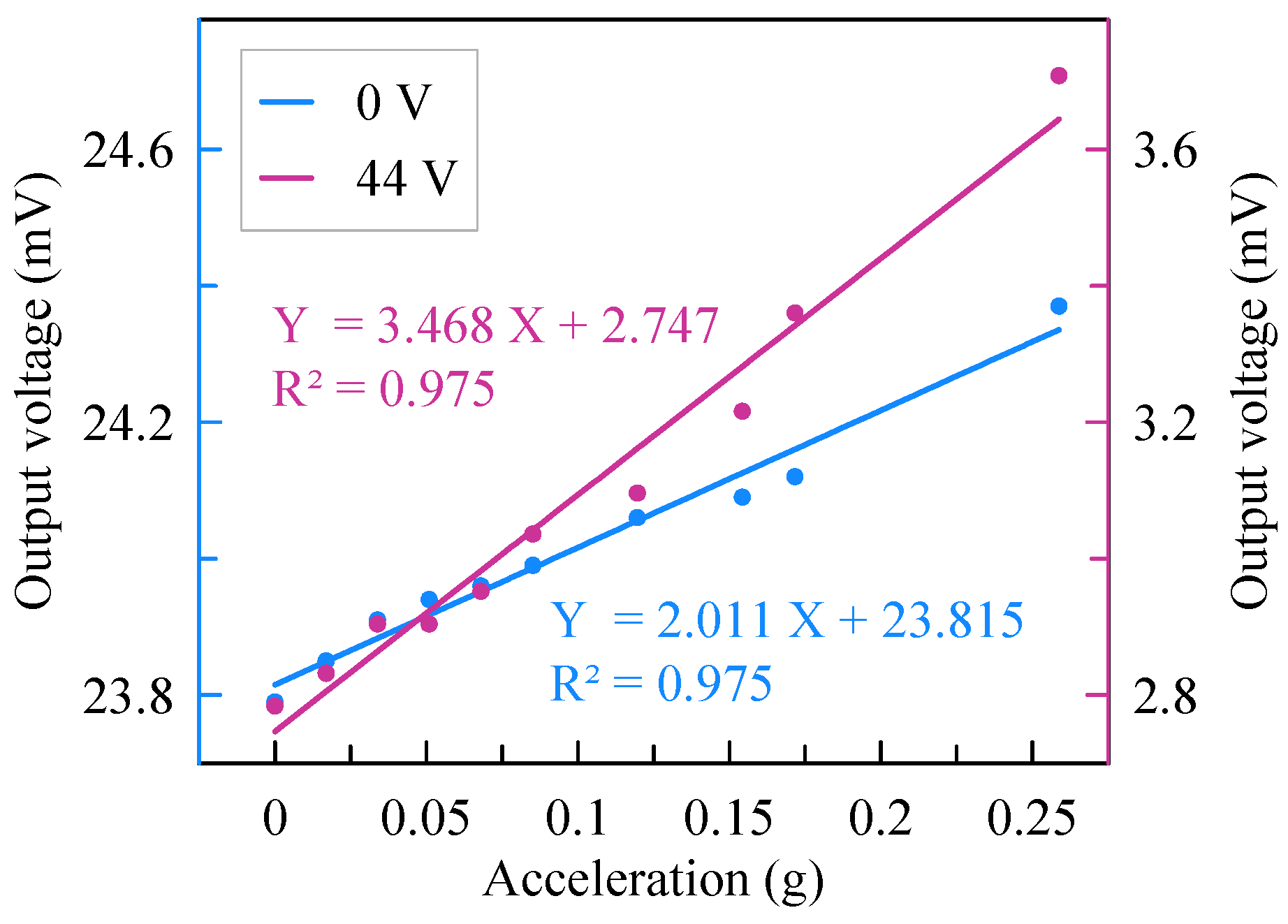
5.2. Sensitivity, Range, and Bandwidth
5.3. Noise and Bias Instability
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Langfelder, G.; Bestetti, M.; Gadola, M. Silicon MEMS inertial sensors evolution over a quarter century. J. Micromech. Microeng. 2021, 31, 084002. [Google Scholar] [CrossRef]
- Mohammed, Z.; Elfadel, I.A.M.; Rasras, M. Monolithic multi degree of freedom (MDoF) capacitive MEMS accelerometers. Micromachines 2018, 9, 602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- D’Alessandro, A.; Scudero, S.; Vitale, G. A review of the capacitive MEMS for seismology. Sensors 2019, 19, 3093. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krishnamoorthy, U.; Olsson, R.H.; Bogart, G.R.; Baker, M.S.; Carr, D.W.; Swiler, T.P.; Clews, P.J. In-plane MEMS-based nano-g accelerometer with sub-wavelength optical resonant sensor. Sens. Actuator A Phys. 2008, 145, 283–290. [Google Scholar] [CrossRef]
- Pike, W.T.; Standley, I.M.; Calcutt, S. A silicon microseismometer for Mars. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; pp. 622–625. [Google Scholar]
- Abdolvand, R.; Amini, B.V.; Ayazi, F. Sub-micro-gravity in-plane accelerometers with reduced capacitive gaps and extra seismic mass. J. Microelectromech. Syst. 2007, 16, 1036–1043. [Google Scholar] [CrossRef]
- Hsu, C.P.; Yip, M.C.; Fang, W. Implementation of a gap-closing differential capacitive sensing Z-axis accelerometer on an SOI wafer. J. Micromech. Microeng. 2009, 19, 075006. [Google Scholar] [CrossRef]
- Liu, H.; Pike, W.T.; Dou, G. A seesaw-lever force-balancing suspension design for space and terrestrial gravity-gradient sensing. J. Appl. Phys. 2016, 119, 124508. [Google Scholar] [CrossRef] [Green Version]
- Pike, W.T.; Kumar, S. Improved design of micromachined lateral suspensions using intermediate frames. J. Micromech. Microeng. 2007, 17, 1680–1694. [Google Scholar] [CrossRef]
- Li, Z.; Wu, W.J.; Zheng, P.P.; Liu, J.Q.; Fan, J.; Tu, L.C. Novel capacitive sensing system design of a microelectromechanical systems accelerometer for gravity measurement applications. Micromachines 2016, 7, 167. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Middlemiss, R.P.; Samarelli, A.; Paul, D.J.; Hough, J.; Rowan, S.; Hammond, G.D. Measurement of the Earth tides with a MEMS gravimeter. Nature 2016, 531, 614–617. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boom, B.A.; Bertolini, A.; Hennes, E.; Brookhuis, R.A.; Wiegerink, R.J.; Van Den Brand, J.F.J.; Beker, M.G.; Oner, A.; Van Wees, D. Nano-G accelerometer using geometric anti-springs. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; Volume 2, pp. 33–36. [Google Scholar]
- El Mansouri, B.; Middelburg, L.M.; Poelma, R.H.; Zhang, G.Q.; van Zeijl, H.W.; Wei, J.; Jiang, H.; Vogel, J.G.; van Driel, W.D. High-resolution MEMS inertial sensor combining large-displacement buckling behaviour with integrated capacitive readout. Microsyst. Nanoeng. 2019, 5, 60. [Google Scholar] [CrossRef] [PubMed]
- Tang, S.; Liu, H.; Yan, S.; Xu, X.; Wu, W.; Fan, J.; Liu, J.; Hu, C.; Tu, L. A high-sensitivity MEMS gravimeter with a large dynamic range. Microsyst. Nanoeng. 2019, 5, 45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hopkins, R.; Miola, J.; Setterlund, R. The Silicon Oscillating Accelerometer: A High-Performance MEMS Accelerometer for Precision Navigation and Strategic Guidance Applications. In Proceedings of the 2005 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 24–26 January 2005; pp. 970–979. [Google Scholar]
- Hao, Y.; Xie, J.; Yuan, W.; Chang, H. Dicing-free SOI process based on wet release technology. Micro Nano Lett. 2016, 11, 775–778. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Young’s modulus of silicon (E) | 169 GPa |
| Proof mass (m) | 3.2 μg |
| Thickness of folding beam () | 60 μm |
| Width of folding beam (bf) | 25 μm |
| Length of folding beam (lf) | 2650 μm |
| Initial angle of nonlinear beam () | 0.55° |
| Cross-sectional area of nonlinear beam (A) | 1500 μm2 |
| Thickness of nonlinear beam () | 60 μm |
| Width of nonlinear beam (bn) | 25 μm |
| Length of nonlinear beam (ln) | 3100 μm |
| Number of drive combs | 240 |
| Number of assembly combs | 960 |
| Gap of combs | 4 μm |
| Sense capacitance | 26.8 pF |
| Overall dimension | 8.8 mm × 8.8 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Hao, Y.; Sun, Z.; Zu, L.; Yuan, W.; Chang, H. Design of a Capacitive MEMS Accelerometer with Softened Beams. Micromachines 2022, 13, 459. https://doi.org/10.3390/mi13030459
Wang C, Hao Y, Sun Z, Zu L, Yuan W, Chang H. Design of a Capacitive MEMS Accelerometer with Softened Beams. Micromachines. 2022; 13(3):459. https://doi.org/10.3390/mi13030459
Chicago/Turabian StyleWang, Chenggang, Yongcun Hao, Zheng Sun, Luhan Zu, Weizheng Yuan, and Honglong Chang. 2022. "Design of a Capacitive MEMS Accelerometer with Softened Beams" Micromachines 13, no. 3: 459. https://doi.org/10.3390/mi13030459
APA StyleWang, C., Hao, Y., Sun, Z., Zu, L., Yuan, W., & Chang, H. (2022). Design of a Capacitive MEMS Accelerometer with Softened Beams. Micromachines, 13(3), 459. https://doi.org/10.3390/mi13030459