
Three-Dimensional Performance Evaluation of Hemispherical Coriolis Vibratory Gyroscopes
 ,
,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
- -
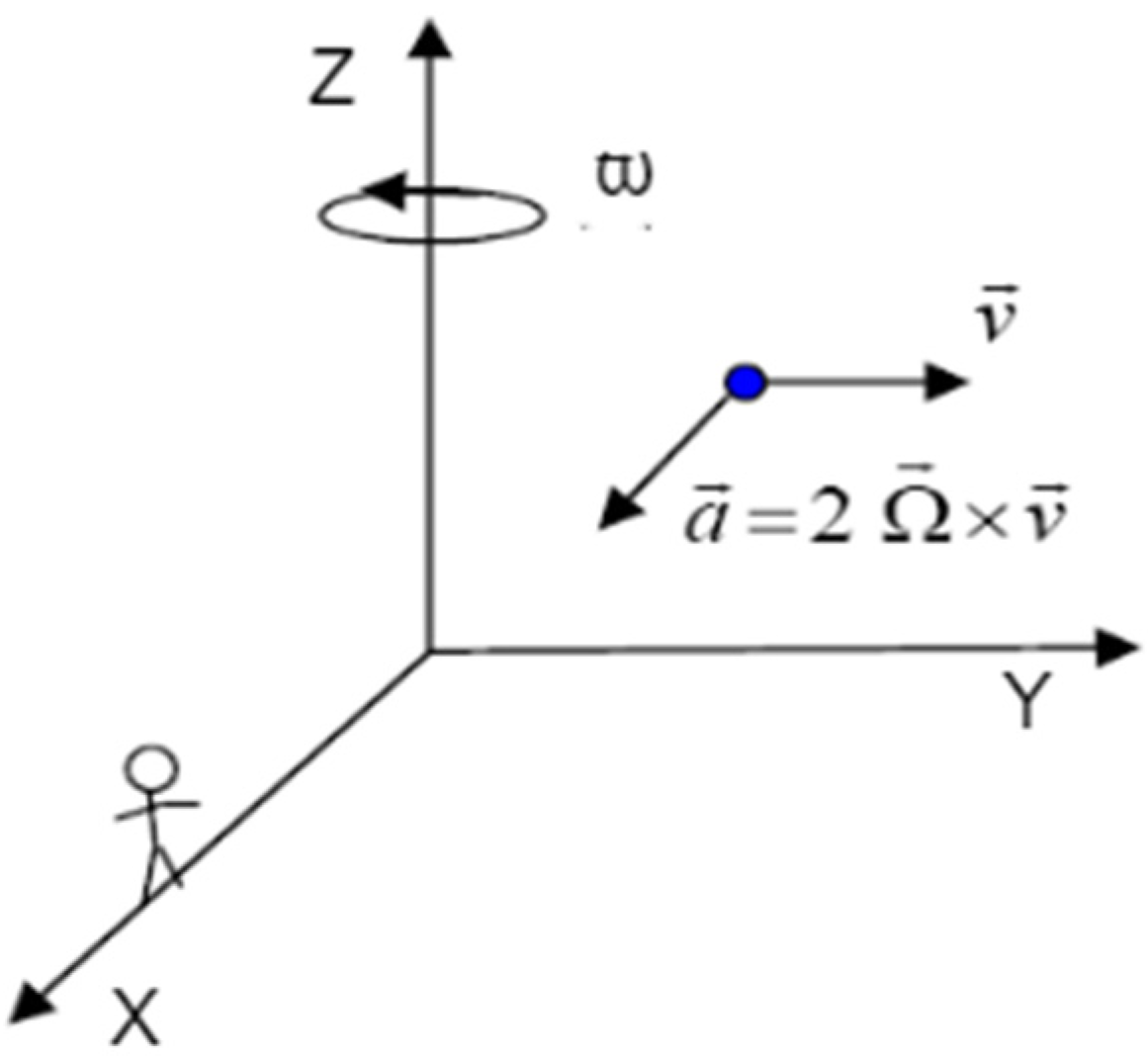
- The first one is a change in the velocity of the object over time. At different times, equal or different velocities might be observed in a rotating frame. In inertial frames, where the common laws of physics apply, the pseudo acceleration is proportional to the angular velocity of the reference frame (velocity changes direction in the coordinate axis) and the velocity of the object on a vertical plane around the axis of rotation. The minus sign is derived from the conventional definition of the cross product (right-hand rule) and the notation convention for angular velocity vectors.
- -
- The second one is a change in space velocity. Different points have different velocities in a rotating coordinate axis (such as the inertial reference frame). In other words, a change in the position of an object needs to have accelerated linear motion, because the velocity changes by equal amounts from one point to another in the coordinate system. This effect (the Coriolis force) is proportional to the angular velocity (which determines the relative velocity of two different points in the rotating reference frame) and the velocity component on a vertical plane around the axis of rotation (which determines how fast it moves between points).
- They have a short start-up time.
- They do not need bearings due to the lack of a rotating shaft.
- They do not need an engine.
- When designed in an effective way, they show high durability and do not need maintenance or repair.
- They are much smaller and lighter than traditional gyroscopes.
- Low cost is one of the most important advantages of these gyroscopes.
- They have a simpler manufacturing process.
- They have low energy consumption.
2. HRG Formulation
Three-Dimensional Finite Element Analysis
3. Designing
4. Calculating the Vibration Point following Vibration and Rotation
4.1. Analysis for Improving the Equations of Rotation and Vibration
4.2. Validation
4.2.1.
4.2.2.
4.2.3.
4.2.4.
5. Material Used in Electrodes
6. Drive Circuit
7. Displacement and Excitation Frequency in Different Modes
8. Sensitivity Analysis of HRG Pickoffs and Forcers
9. Sensitivity Analysis of HRG Pickoffs and Forcers
10. Changes in Electrode Material in HRG
11. Changes in Electrode Material in HRG
12. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Apostolyuk, V. Coriolis Vibratory Gyroscopes; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Usubamatov, R. Inertial forces acting on a gyroscope. J. Mech. Sci. Technol. 2018, 32, 101–108. [Google Scholar] [CrossRef]
- Pai, P.; Chowdhury, F.K.; Mastrangelo, C.H.; Tabib-Azar, M. MEMS-based hemispherical resonator gyroscopes. In Proceedings of the 2012 IEEE SENSORS Proceedings, Taipei, Taiwan, 28–31 October 2012; 2012; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Ranji, A.R.; Damodaran, V.; Li, K.; Chen, Z.; Alirezaee, S.; Ahamed, M.J. Recent Advances in MEMS-Based 3D Hemispherical Resonator Gyroscope (HRG)—A Sensor of Choice. Micromachines 2022, 13, 1676. [Google Scholar] [CrossRef] [PubMed]
- Jose, K.; Suh, W.; Xavier, P.; Varadan, V. Surface acoustic wave MEMS gyroscope. Wave Motion 2002, 36, 367–381. [Google Scholar] [CrossRef]
- Bergh, R.A.; Lefevre, H.C.; Shaw, H.J. All-single-mode fiber-optic gyroscope. Opt. Lett. 1981, 6, 198–200. [Google Scholar] [CrossRef]
- Prestage, J.D.; Chung, S.; Le, T.; Beach, M.; Maleki, L.; Tjoelker, R.L. One-Liter Ion Clock: New Capability for Spaceflight Applications. In Proceedings of the 35th Annual Precise Time and Time Interval Systems and Applications Meeting, San Diego, CA, USA, 2–4 December 2003; pp. 427–434. [Google Scholar]
- Xie, H.; Fedder, G. Fabrication, characterization, and analysis of a DRIE CMOS-MEMS gyroscope. IEEE Sens. J. 2003, 3, 622–631. [Google Scholar] [CrossRef]
- Chouvion, B.; McWilliam, S.; Popov, A. Effect of nonlinear electrostatic forces on the dynamic behaviour of a capacitive ring-based Coriolis Vibrating Gyroscope under severe shock. Mech. Syst. Signal Process. 2018, 106, 395–412. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Cao, H.; Shen, C.; Chai, J. A Novel Self-Calibration Method and Experiment of MEMS Gyroscope Based on Virtual Coriolis Force. Micromachines 2018, 9, 328. [Google Scholar] [CrossRef] [Green Version]
- Guo, K.; Wu, Y.; Zhang, Y.; Sun, J.; Xiao, D.; Wu, X. Damping Asymmetry Trimming Based on the Resistance Heat Dissipation for Coriolis Vibratory Gyroscope in Whole-Angle Mode. Micromachines 2020, 11, 945. [Google Scholar] [CrossRef]
- Salzenstein, P.; Kuna, A.; Sojdr, L.; Chauvin, J. Significant step in ultra-high stability quartz crystal oscillators. Electron. Lett. 2010, 46, 1433–1434. [Google Scholar] [CrossRef]
- Lavrik, N.V.; Datskos, P.G. Optically read Coriolis vibratory gyroscope based on a silicon tuning fork. Microsystems Nanoeng. 2019, 5, 47. [Google Scholar] [CrossRef] [Green Version]
- Guerinoni, L.; Falorni, L.G.; Gattere, G. Modelling Cross Axis Sensitivity in MEMS Coriolis Vibratory Gyroscopes. Multidiscip. Digit. Publ. Inst. Proc. 2017, 1, 281. [Google Scholar] [CrossRef] [Green Version]
- Raspopov, V.Y.; Alaluev, R.V.; Ladonkin, A.V.; Likhosherst, V.V.; Shepilov, S.I. Tuning and Calibration of a Coriolis Vibratory Gyroscope with a Metal Resonator to Operate in Angular Rate Sensor Mode. Gyroscopy Navig. 2020, 11, 34–40. [Google Scholar] [CrossRef]
- Basarab, M.; Lunin, B. Solving the Coriolis Vibratory Gyroscope Motion Equations by Means of the Angular Rate B-Spline Approximation. Mathematics 2021, 9, 292. [Google Scholar] [CrossRef]
- Xiao, P.; Qiu, Z.; Pan, Y.; Li, S.; Qu, T.; Tan, Z.; Liu, J.; Yang, K.; Zhao, W.; Luo, H.; et al. Influence of Electrostatic Forces on the Vibrational Characteristics of Resonators for Coriolis Vibratory Gyroscopes. Sensors 2020, 20, 295. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, H.; Daruwalla, A.; Liu, C.-S.; Ayazi, F. A High-Frequency Resonant Framed-Annulus Pitch or Roll Gyroscope for Robust High-Performance Single-Chip Inertial Measurement Units. J. Microelectromechanical Syst. 2018, 27, 995–1008. [Google Scholar] [CrossRef]
- Price, R.H. Gyroscopes simply explained with Coriolis pseudotorques. Am. J. Phys. 2020, 88, 1145–1146. [Google Scholar] [CrossRef]
- Norouzpour-Shirazi, A.; Ayazi, F. A Dual-Mode Actuation and Sensing Scheme for In-Run Calibration of Bias and Scale Factor Errors in Axisymmetric Resonant Gyroscopes. IEEE Sens. J. 2017, 18, 1993–2005. [Google Scholar] [CrossRef]
- Mittapally, G.K.M.; Dantala, D.; Chhabra, I.; Kishore, P.; Rao, N.V.N.; Das, K.C. Analysis of metallic hemispherical shell vibration modes for coriolis vibratory gyroscope. IOP Conf. Ser. Mater. Sci. Eng. 2018, 383, 012022. [Google Scholar] [CrossRef]
- Shu, L.; Yu, Y.; Yong, Z.; Rao, Z.; Ke, S.; Fei, L.; Zhang, S.; Wang, Y. Negative Coriolis effect in piezoelectric metamaterials. J. Alloy. Compd. 2019, 801, 262–266. [Google Scholar] [CrossRef]
- Jie, D. Simulating the performance of ring-based coriolis vibrating gyroscopic sensors. Microsyst. Technol. 2018, 25, 139–149. [Google Scholar] [CrossRef]
- Xiao, P.; Qiu, Z.; Luo, Y.; Pan, Y.; Qu, T.; Yang, K.; Luo, H.; Qin, S. Influence of Temperature Variation on the Vibrational Characteristics of Fused Silica Cylindrical Resonators for Coriolis Vibratory Gyroscopes. Sensors 2020, 20, 1032. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ding, X.; Jia, J.; Qin, Z.; Ruan, Z.; Zhao, L.; Li, H. A Lumped Mass Model for Circular Micro-Resonators in Coriolis Vibratory Gyroscopes. Micromachines 2019, 10, 378. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ardakani, M.H.A. Development of 3D High-Q Fused Quartz Micro Structures for Precision Coriolis Vibratory Gyroscopes. Doctoral Dissertation, University of California, Irvine, CA, USA, 2019. [Google Scholar]
- Senkal, D.; Shkel, A.M. Whole-Angle MEMS Gyroscopes: Challenges and Opportunities; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Hodjat-Shamami, M.; Ayazi, F. Eigenmode operation of piezoelectric resonant gyroscopes. Microsystems Nanoeng. 2020, 6, 108. [Google Scholar] [CrossRef] [PubMed]
- Parween, R. Significance of the Asymmetry of the Haltere: A Microscale Vibratory Gyroscope. Appl. Bionics Biomech. 2020, 2020, 8647137. [Google Scholar] [CrossRef]
- Hu, Z.; Gallacher, B. A mode-matched force-rebalance control for a MEMS vibratory gyroscope. Sens. Actuators A Phys. 2018, 273, 1–11. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Capacitance (VC) | Piezoresistive | Piezoelectric | |
|---|---|---|---|
| Functional frequency | 0 Hz–6 kHz | 0 Hz–6 kHz | 3 Hz–30 kHz |
| acceleration | 1 g–200 g | Up to 2000 g | Up to 20,000 g |
| Functional temperature | −55–175 °C | −55–125 °C | −200–700 °C |
| SNR | High | Fair | High |
| Measurement error | 0.1% | 2.1% | 3.2% |
| Temperature sensitivity | No | Yes | Yes |
| Self-test | True internal self-test | No self-test | No self-test |
| Electrode | ||||
|---|---|---|---|---|
| From Angle (°) | To Angle (°) | From Angle (°) | To Angle (°) | |
| Electrode 1 | 0 | 40 | 100 | 110 |
| Electrode 2 | 45 | 85 | 100 | 110 |
| Electrode 3 | 90 | 130 | 100 | 110 |
| Electrode 4 | 135 | 175 | 100 | 110 |
| Electrode 5 | 180 | 220 | 100 | 110 |
| Electrode 6 | 225 | 265 | 100 | 110 |
| Electrode 7 | 270 | 310 | 100 | 110 |
| Electrode 8 | 315 | 355 | 100 | 110 |
| Electrode | ||||
|---|---|---|---|---|
| From Angle (°) | To Angle (°) | From Angle (°) | To Angle (°) | |
| Electrode 1 | 0 | 20 | 100 | 110 |
| Electrode 2 | 22.5 | 42.5 | 100 | 110 |
| Electrode 3 | 45 | 65 | 100 | 110 |
| Electrode 4 | 67.5 | 87.5 | 100 | 110 |
| Electrode 5 | 90 | 110 | 100 | 110 |
| Electrode 6 | 112.5 | 132.5 | 100 | 110 |
| Electrode 7 | 135 | 155 | 100 | 110 |
| Electrode 8 | 157.5 | 177.5 | 100 | 110 |
| Electrode 9 | 180 | 200 | 100 | 110 |
| Electrode 10 | 202.5 | 222.5 | 100 | 110 |
| Electrode 11 | 225 | 245 | 100 | 110 |
| Electrode 12 | 247.5 | 267.5 | 100 | 110 |
| Electrode 13 | 270 | 290 | 100 | 110 |
| Electrode 14 | 292.5 | 312.5 | 100 | 110 |
| Electrode 15 | 315 | 335 | 100 | 110 |
| Electrode 16 | 337.5 | 357.5 | 100 | 110 |
| Parameter | Material | Excitation | Dimension and Number |
|---|---|---|---|
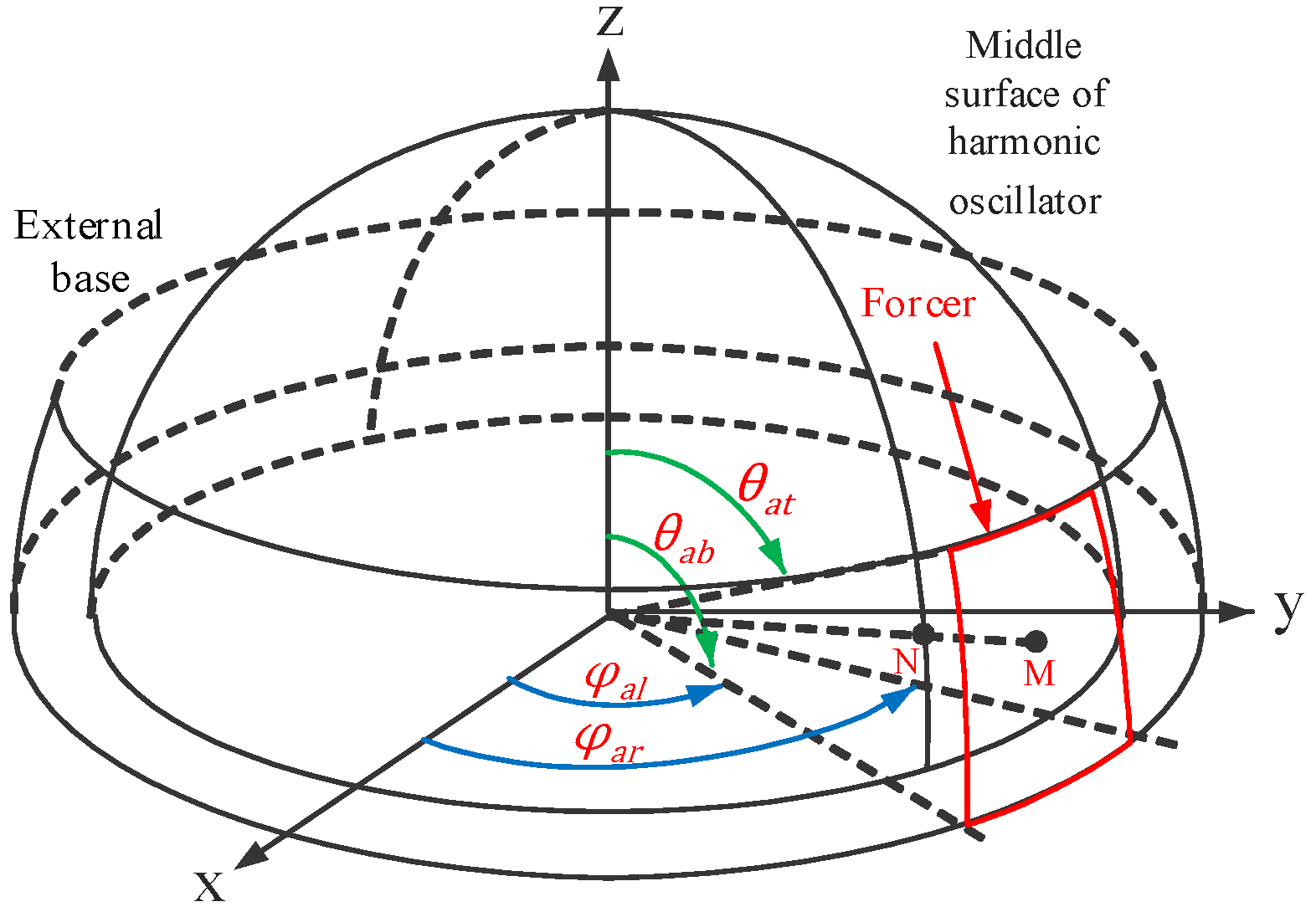
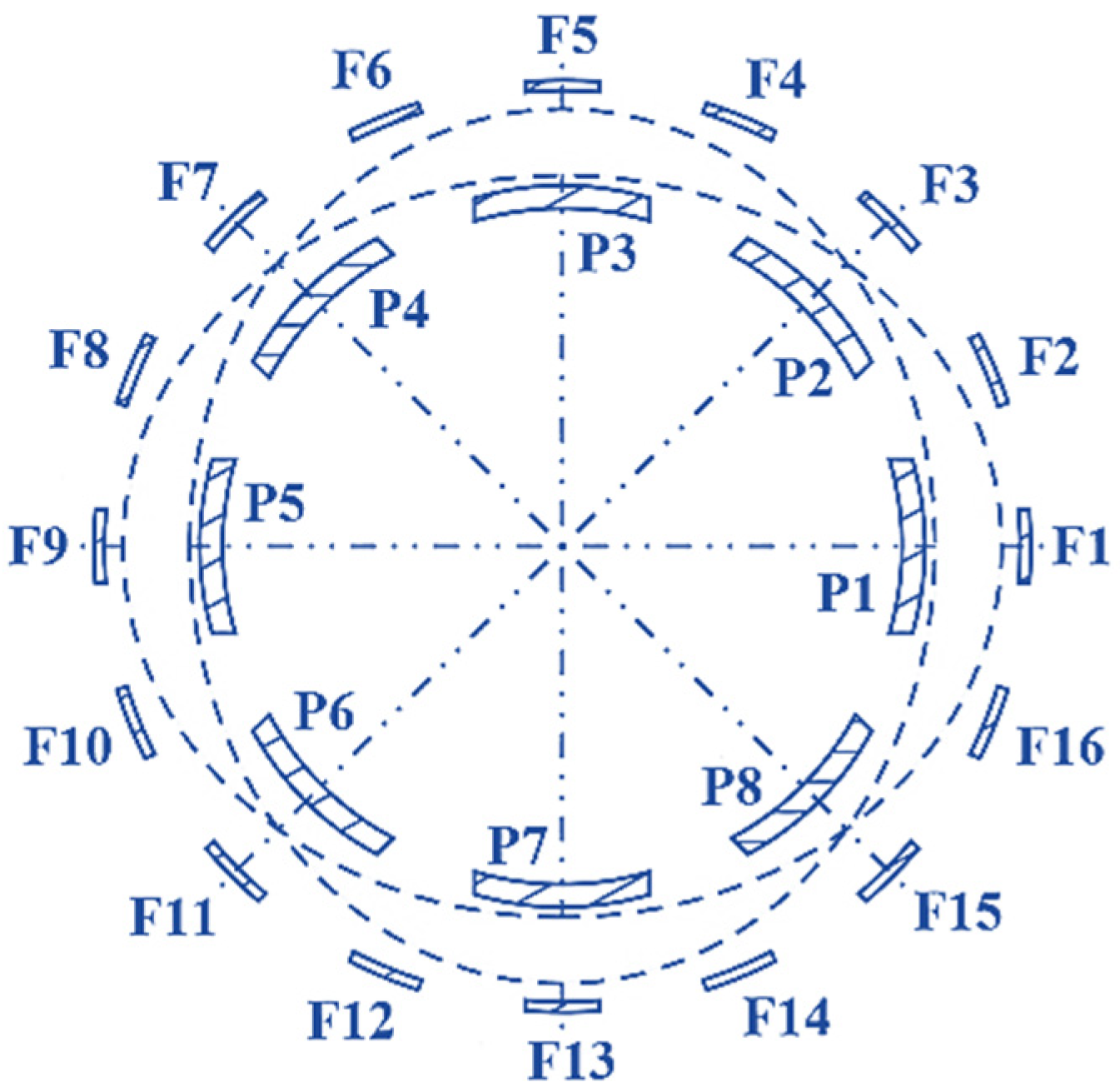
| Peakoffs | Iron | -- | 8 electrodes with a longitudinal angle (φ) of 45° (40° of the electrode itself and 5° of adjacent distance) and a height angle (θ) of 10° with a radius of 14 mm and a thickness of 0.5 mm |
| Forcers | Iron | where ω2 is the same excitation frequency in the second mode | 16 electrodes with a longitudinal angle (φ) of 22.5 degrees (20 degrees of the electrode itself and 2.5 degrees of adjacent distance) and a height angle (θ) of 10 degrees with a radius of 16 mm and a thickness of 0.5 mm |
| Resonator | Fused Quartz | -- | A hemisphere with an inner radius of 15 mm and an outer radius of 15.5 mm |
| Mode Number | Measured Frequency | Calculated Frequency |
|---|---|---|
| Second mode | 6903 Hz | 6899 Hz |
| Third mode | 17,310 Hz | 17,301 Hz |
| Fourth mode | 30,434 Hz | 30,427 Hz |
| Fifth mode | 37,095 Hz | 37,281 Hz |
| Kind of Sensitivity | |||||
|---|---|---|---|---|---|
| From | To | From | To | ||
| Base-mode forcer | 0 | 20 | 100 | 110 | 5.196 |
| Base-mode peakoff | 0 | 40 | |||
| Mode 1 | 0 | 21 | 100 | 110 | 5.223 |
| Mode 2 | 0 | 22 | 100 | 110 | 5.401 |
| Mode 3 | 0 | 19 | 100 | 110 | 5.179 |
| Mode 4 | 0 | 18 | 100 | 110 | 5.161 |
| Kind of Sensitivity | |||||
|---|---|---|---|---|---|
| From | To | From | To | ||
| Base-mode forcer | 0 | 20 | 100 | 110 | 5.196 |
| Base-mode peakoff | 0 | 40 | |||
| Mode 1 | 0 | 21 | 100 | 110 | 5.223 |
| Mode 2 | 0 | 22 | 100 | 110 | 5.401 |
| Mode 3 | 0 | 19 | 100 | 110 | 5.179 |
| Mode 4 | 0 | 18 | 100 | 110 | 5.161 |
| Electrode material | |
|---|---|
| Mode I Soft Iron | 5.197 |
| Mode II Copper | 5.246 |
| Mode III Silicon Carbide | 4.958 |
| Parameter | Piezo | Uniaxial Capacitor | Capacitor and Piezo | Biaxial Capacitor |
|---|---|---|---|---|
| Price | Cheap | Expensive | Expensive | Medium |
| Control ability | Yes | Yes | Yes | Yes |
| DC voltage range | 1 V–20 V | 0–100 | About 5 V | Equal or greater than 100 V |
| AC voltage range | Equal or greater than 100 V | 20 mV–80 mV | Equal or greater than 100 V | Equal or greater than 100 V |
| Weakness | Use of high-quality materials; many control loops; heating of the resonator at the junction of the piezo and, finally, deformation of the resonator in the long run; mechanical imbalance; shredding or skewing pickups and forceps for better control | Use of a DC voltage for resonator bias; requirement of tune and balance electrodes; occurrence of thermo-elastic losses and limited choice of material; | Piezo electrodes are only forcers, and capacitive electrodes are only pickups; use of many control loops | Application of high voltage; impact of gyroscope performance on system acceleration |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmoudian, M.; Filho, J.; Melicio, R.; Rodrigues, E.; Ghanbari, M.; Gordo, P. Three-Dimensional Performance Evaluation of Hemispherical Coriolis Vibratory Gyroscopes. Micromachines 2023, 14, 254. https://doi.org/10.3390/mi14020254
Mahmoudian M, Filho J, Melicio R, Rodrigues E, Ghanbari M, Gordo P. Three-Dimensional Performance Evaluation of Hemispherical Coriolis Vibratory Gyroscopes. Micromachines. 2023; 14(2):254. https://doi.org/10.3390/mi14020254
Chicago/Turabian StyleMahmoudian, Mehrdad, Joel Filho, Rui Melicio, Eduardo Rodrigues, Mojgan Ghanbari, and Paulo Gordo. 2023. "Three-Dimensional Performance Evaluation of Hemispherical Coriolis Vibratory Gyroscopes" Micromachines 14, no. 2: 254. https://doi.org/10.3390/mi14020254
APA StyleMahmoudian, M., Filho, J., Melicio, R., Rodrigues, E., Ghanbari, M., & Gordo, P. (2023). Three-Dimensional Performance Evaluation of Hemispherical Coriolis Vibratory Gyroscopes. Micromachines, 14(2), 254. https://doi.org/10.3390/mi14020254