
Stepped-Tube Backside Cavity Piezoelectric Ultrasound Transducer Based on Sc0.2AI0.8N Thin Films

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
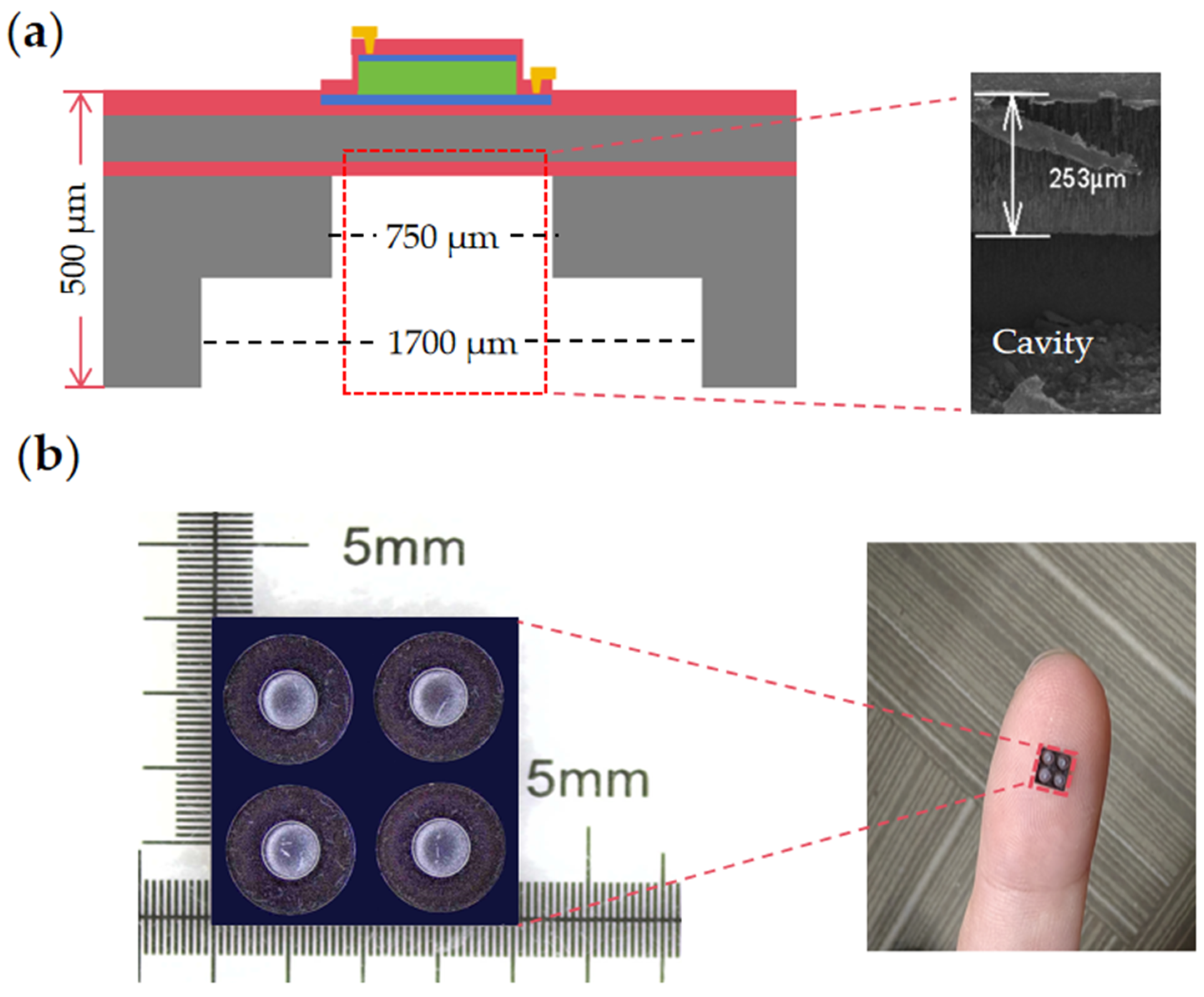
2. Design and Modeling
2.1. Theoretical Analysis
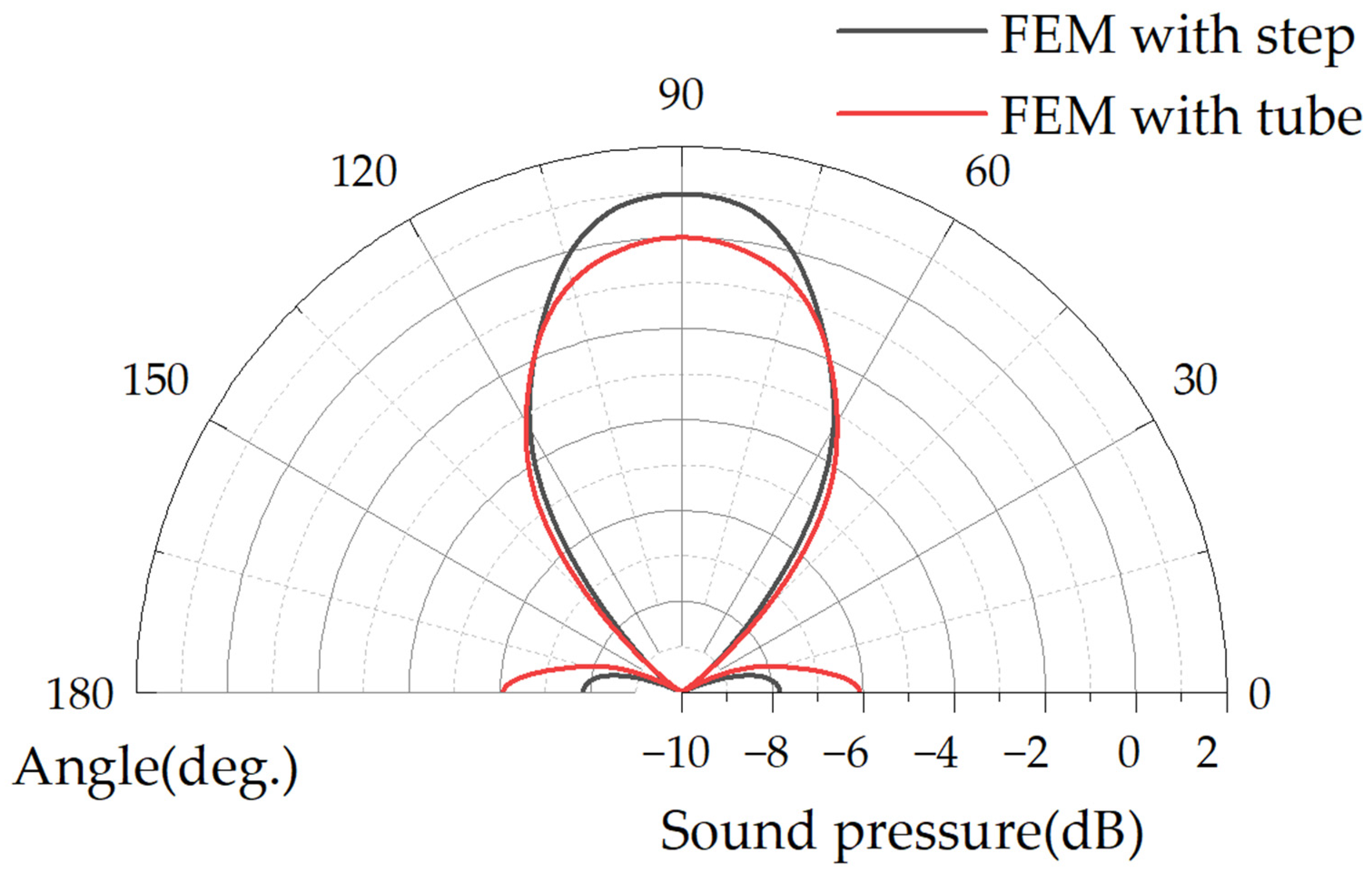
2.2. Modeling Analysis
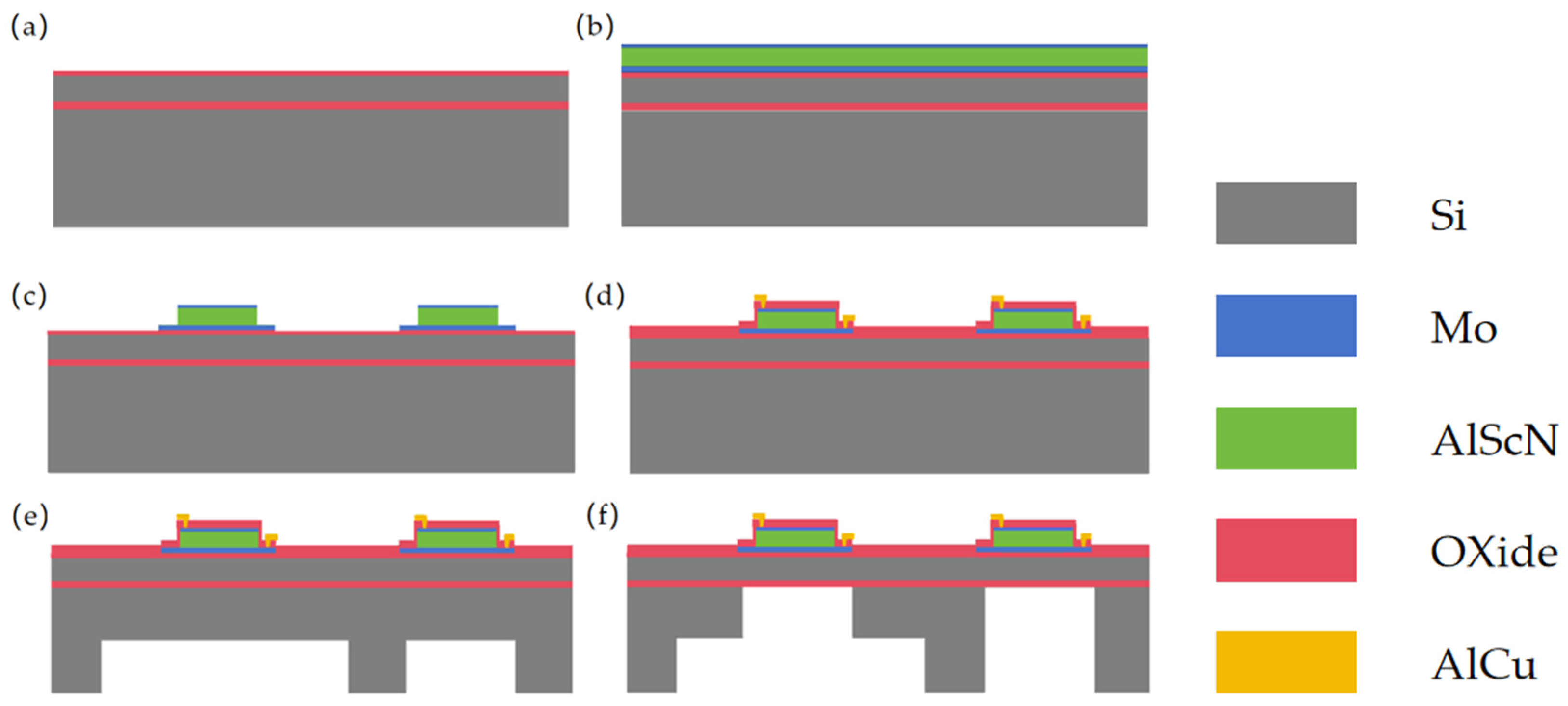
3. Fabrication
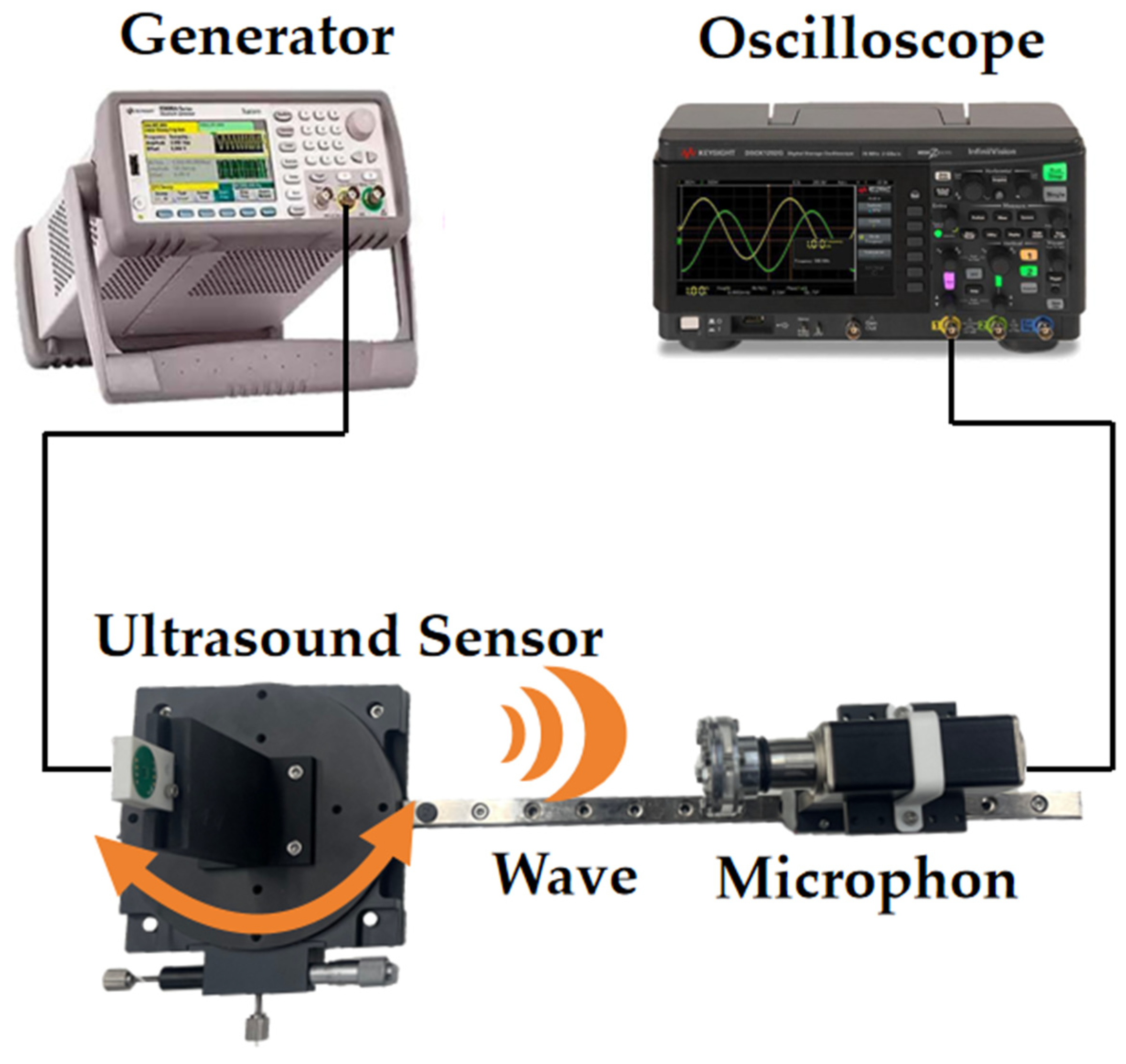
4. Experiments
4.1. Electrical Characterization
4.2. Acoustic Characteristics
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Akasheh, F.; Myers, T.; Fraser, J.D.; Bose, S.; Bandyopadhyay, A. Development of piezoelectric micromachined ultrasonic transducers. Sens. Actuators A Phys. 2004, 111, 275–287. [Google Scholar] [CrossRef]
- Tang, H.Y.; Lu, Y.; Jiang, X.; Ng, E.J.; Tsai, J.M.; Horsley, D.A.; Boser, B.E. 3-D ultrasonic fingerprint sensor-on-a-chip. IEEE J. Solid-State Circuits 2016, 51, 2522–2533. [Google Scholar] [CrossRef]
- Przybyla, R.J.; Tang, H.Y.; Guedes, A.; Shelton, S.E.; Horsley, D.A.; Boser, B.E. 3D ultrasonic rangefinder on a chip. IEEE J. Solid-State Circuits 2014, 50, 320–334. [Google Scholar] [CrossRef]
- Dausch, D.E.; Gilchrist, K.H.; Carlson, J.B.; Hall, S.D.; Castellucci, J.B.; Von Ramm, O.T. In vivo real-time 3-D intracardiac echo using PMUT arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2014, 61, 1754–1764. [Google Scholar] [CrossRef] [PubMed]
- Xiu, X.; Yang, H.; Ji, M.; Lv, H.; Zhang, S. Development of mems airflow volumetric flow sensing system with single piezoelectric micromachined ultrasonic transducer (pmut) array. Micromachines 2022, 13, 1979. [Google Scholar] [CrossRef] [PubMed]
- Przybyla, R.J.; Shelton, S.E.; Guedes, A.; Izyumin, I.I.; Kline, M.H.; Horsley, D.A.; Boser, B.E. In-air range finding with an ALN piezoelectric micromachined ultrasound transducer. IEEE Sens. J. 2011, 11, 2690–2697. [Google Scholar]
- Wang, Y.; Zhang, L.; Wang, B.; Cai, J.; Gu, Y.A.; Lou, L.; Wang, X.; Wu, T. Microwave-induced thermoacoustic imaging with a multi-cell AlScN piezoelectric micromachined ultrasonic transducer. Appl. Phys. Lett. 2023, 122, 133702. [Google Scholar] [CrossRef]
- Cai, J.; Wang, Y.; Jiang, D.; Gu, Y.; Lou, L.; Gao, F.; Wu, T. Photoacoustic Imaging Based on Broadened Bandwidth Aluminum Nitride Piezoelectric Micromachined Ultrasound Transducers. IEEE Sens. Lett. 2023, 7, 2500604. [Google Scholar] [CrossRef]
- Sun, C.; Shi, Q.; Yazici, M.S.; Lee, C.; Liu, Y. Development of a Highly Sensitive Humidity Sensor Based on a Piezoelectric Micromachined Ultrasonic Transducer Array Functionalized with Graphene Oxide Thin Film. Sensors 2018, 18, 4352. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Sulaiman, O.B.; Dong, B.; Lee, C. Development Trends and Perspectives of Future Sensors and MEMS/NEMS. Micromachines 2020, 11, 7. [Google Scholar] [CrossRef]
- Liu, S.; Liao, J.; Huang, X.; Zhang, Z.; Wang, W.; Wang, X.; Yang, Z. Green Fabrication of Freestanding Piezoceramic Films for Energy Harvesting and Virus Detection. Nano-Micro Lett. 2023, 15, 131. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, A.; Mohd-Yasin, F. Reactive Sputtering of Aluminum Nitride (002) Thin Films for Piezoelectric Applications: A Review. Sensors 2018, 18, 1797. [Google Scholar] [CrossRef] [PubMed]
- Ji, M.; Yang, H.; Zhou, Y.; Xiu, X.; Lv, H.; Zhang, S. Bimorph Dual-Electrode ScAlN PMUT with Two Terminal Connections. Micromachines 2022, 13, 2260. [Google Scholar] [CrossRef] [PubMed]
- Nayak, B.; Gupta, H.; Roy, K.; Ashok, A.; Shastri, V.; Pratap, R. An Experimental Study of the Acoustic Field of a Single-Cell Piezoelectric Micromachined Ultrasound Transducer (PMUT). In Proceedings of the 2020 5th IEEE International Conference on Emerging Electronics (ICEE), New Delhi, India, 26–28 November 2020; pp. 1–4. [Google Scholar]
- Yang, H.; Ji, M.; Xiu, X.; Lv, H.; Gu, A.; Zhang, S. AlScN Film Based Piezoelectric Micromechanical Ultrasonic Transducer for an Extended Long-Range Detection. Micromachines 2022, 13, 1942. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Miao, B.; Wang, G.; Zhou, H.; Zhang, S.; Hu, Y.; Wu, J.; Yu, X.; Li, J. ScAlN Film-Based Piezoelectric Micromechanical Ultrasonic Transducers with Dual-Ring Structure for Distance Sensing. Micromachines 2023, 14, 516. [Google Scholar] [CrossRef] [PubMed]
- Rozen, O.; Block, S.T.; Shelton, S.E.; Horsley, D.A. Piezoelectric micromachined ultrasonic transducer with increased output pressure via concentric venting rings. In Proceedings of the 2015 Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 670–673. [Google Scholar] [CrossRef]
- David, T.B. Fundamentals of Physical Acoustics; Wiley: Hoboken, NJ, USA, 2000. [Google Scholar]
- Senlik, M.N.; Olcum, S.; Koymen, H.; Atalar, A. Radiation impedance of an array of circular capacitive micromachined ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2010, 57, 969–976. [Google Scholar] [CrossRef] [PubMed]
- Ju, X.; Gu, L.; Dong, X. Application and Research of Ultrasonic Horn in Ultrasonic Ranging System. Sens. Transducers 2014, 170, 60–66. [Google Scholar]
- Bozkurt, A. A lumped-circuit model for the radiation impedance of a circular piston in a rigid baffle. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2008, 55, 2046–2052. [Google Scholar] [CrossRef]
- Wang, Q.; Lu, Y.; Mishin, S.; Oshmyansky, Y.; Horsley, D.A. Design, Fabrication, and Characterization of Scandium Aluminum Nitride-Based Piezoelectric Micromachined Ultrasonic Transducers. J. Microelectromech. Syst. 2017, 26, 1132–1139. [Google Scholar] [CrossRef]
- Pierce, A.D. Acoustics: An Introduction to Its Principles and Applications; The ASA Press: London, UK, 2019. [Google Scholar]
- Liu, X.; Zhang, Q.; Chen, M.; Liu, Y.; Zhu, J.; Yang, J.; Wang, F.; Tang, Y.; Zhao, X. Multiphysics Modeling and Analysis of Sc-Doped AlN Thin Film Based Piezoelectric Micromachined Ultrasonic Transducer by Finite Element Method. Micromachines 2023, 14, 1942. [Google Scholar] [CrossRef]
- Zhang, Q.; Chen, M.; Liu, H.; Zhao, X.; Qin, X.; Wang, F.; Tang, Y.; Yeoh, K.H.; Chew, K.-H.; Sun, X. Deposition, Characterization, and Modeling of Scandium-Doped Aluminum Nitride Thin Film for Piezoelectric Devices. Materials 2021, 14, 6437. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Kuryatkov, V.; Borisov, B.; Pandikunta, M.; Nikishin, S.A.; Holtz, M. The effect of BCl3 pretreatment on the etching of AlN in Cl2-based plasma. MRS Online Proc. Libr. 2008, 1108, 934. [Google Scholar] [CrossRef]
- Yan, J.; Zhou, Y.; Zhang, S. Development of high uniformity Al1-xScxN piezoelectric film stack dry etching process on 8-inch silicon wafers. Vacuum 2023, 210, 111907. [Google Scholar] [CrossRef]
- Lea, L.; Barker, L.; Hopkins, J. DRIE, an Enabling Technology for High Density Packaging. In Proceedings of the 2007 International Symposium on High Density Packaging and Microsystem Integration, Shanghai, China, 26–28 June 2007; pp. 1–3. [Google Scholar] [CrossRef]
- Allan, J.Z. Acoustics: Sound Fields and Transducers. J. Acoust. Soc. Am. 2013, 134, 2337. [Google Scholar] [CrossRef]
- Abdalla, O.M.O.; Massimino, G.; D’Argenzio, C.; Colosio, M.; Soldo, M.; Quaglia, F.; Corigliano, A. Numerical Simulation of Crosstalk Effects in PMUT Arrays. In Proceedings of the 2023 24th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Graz, Austria, 16–19 April 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Thao, P.N. Development of Linear pMUT Array with Low Mechanical Crosstalk Toward Ultrasonography Applications. In Proceedings of the 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Orlando, FL, USA, 20–24 June 2021; pp. 659–662. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Lyu, H.; Safari, A.; Zhang, S. Stepped-Tube Backside Cavity Piezoelectric Ultrasound Transducer Based on Sc0.2AI0.8N Thin Films. Micromachines 2024, 15, 72. https://doi.org/10.3390/mi15010072
Li X, Lyu H, Safari A, Zhang S. Stepped-Tube Backside Cavity Piezoelectric Ultrasound Transducer Based on Sc0.2AI0.8N Thin Films. Micromachines. 2024; 15(1):72. https://doi.org/10.3390/mi15010072
Chicago/Turabian StyleLi, Xiaobao, Haochen Lyu, Ahmad Safari, and Songsong Zhang. 2024. "Stepped-Tube Backside Cavity Piezoelectric Ultrasound Transducer Based on Sc0.2AI0.8N Thin Films" Micromachines 15, no. 1: 72. https://doi.org/10.3390/mi15010072
APA StyleLi, X., Lyu, H., Safari, A., & Zhang, S. (2024). Stepped-Tube Backside Cavity Piezoelectric Ultrasound Transducer Based on Sc0.2AI0.8N Thin Films. Micromachines, 15(1), 72. https://doi.org/10.3390/mi15010072