
Compliance and Kinetostatics of a Novel 2PRS-2PSS Compliant Parallel Micromanipulator: Modeling and Analysis


Abstract
:1. Introduction
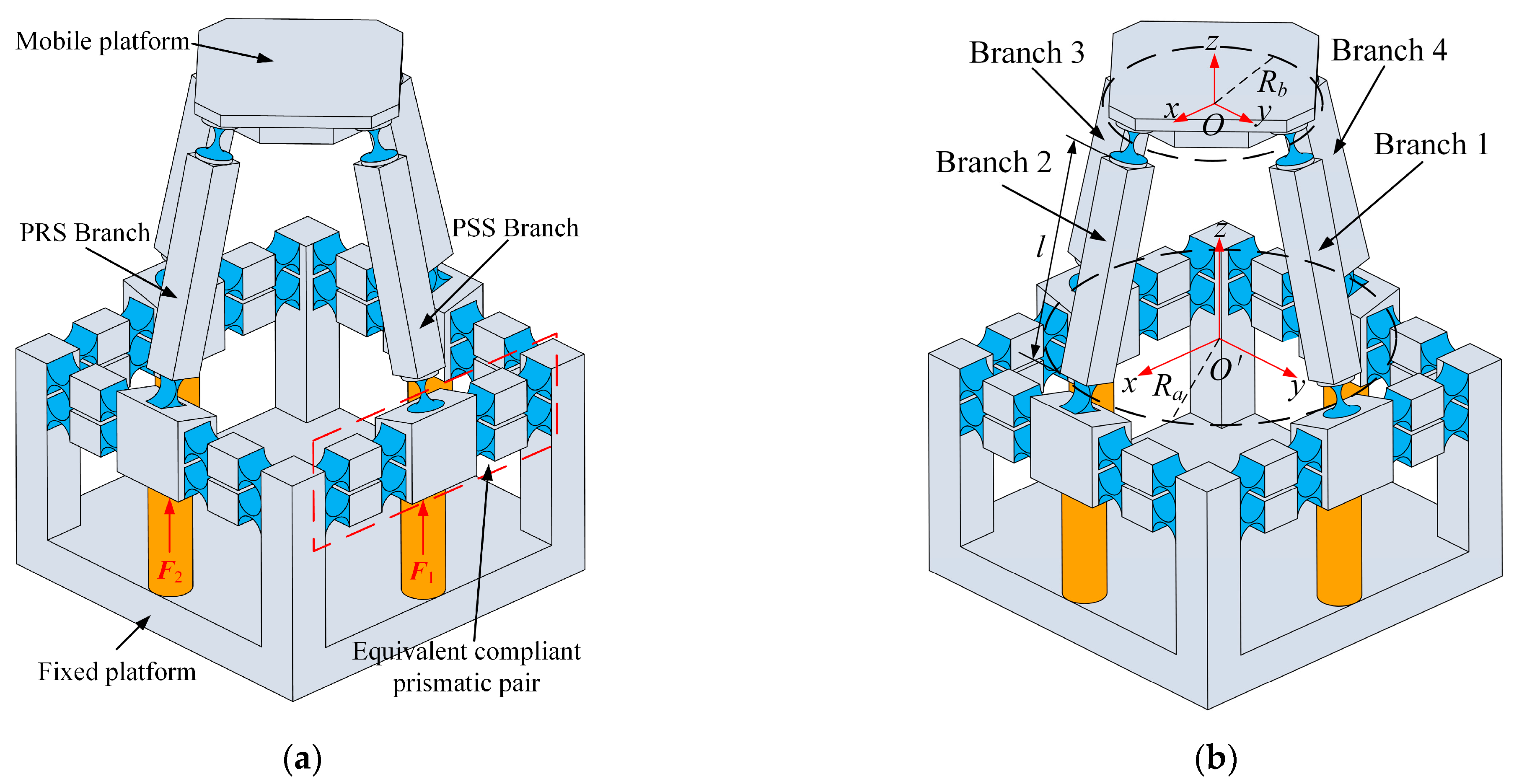
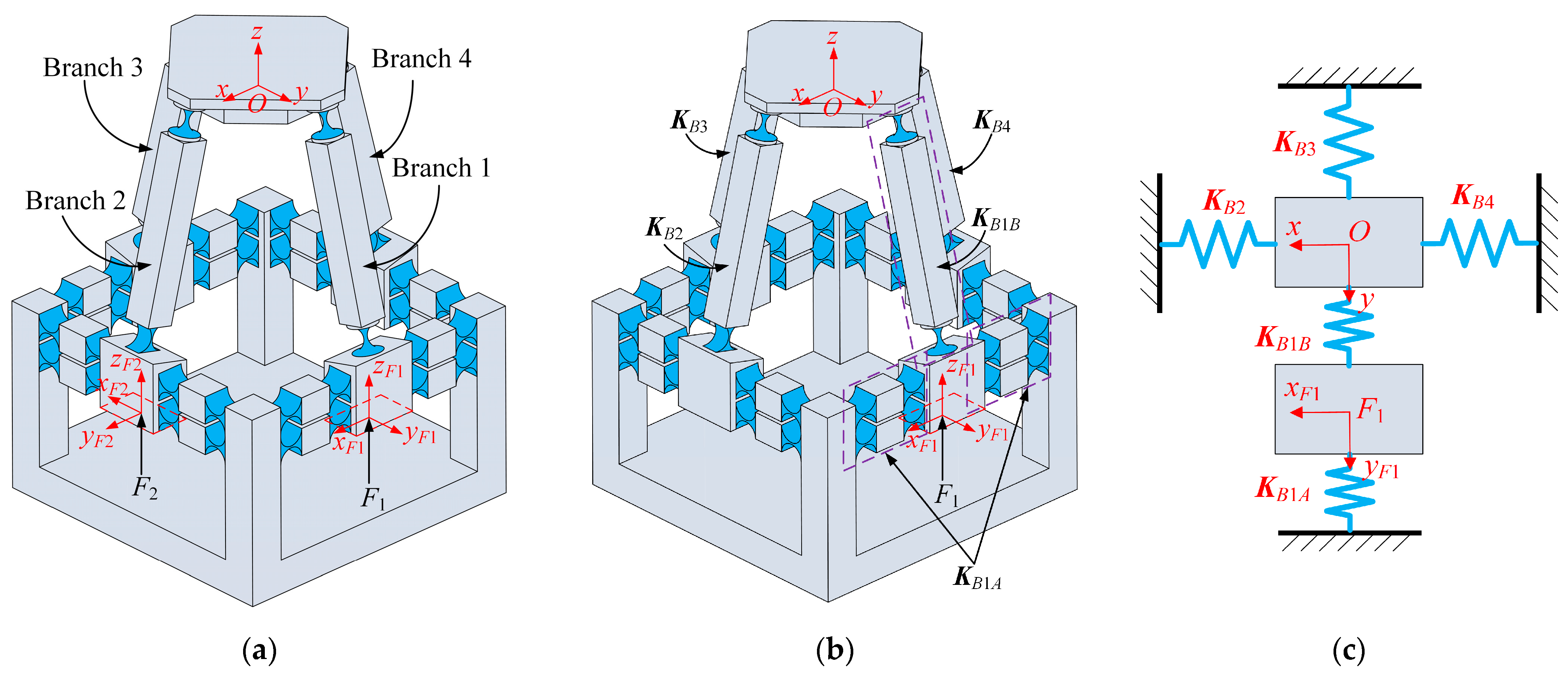
2. Structure of 2PRS-2PSS Compliant Parallel Micromanipulator
3. Modeling and Analysis of the Compliance of the 2PRS-2PSS Compliant Parallel Micromanipulator
3.1. Compliance Matrix Method
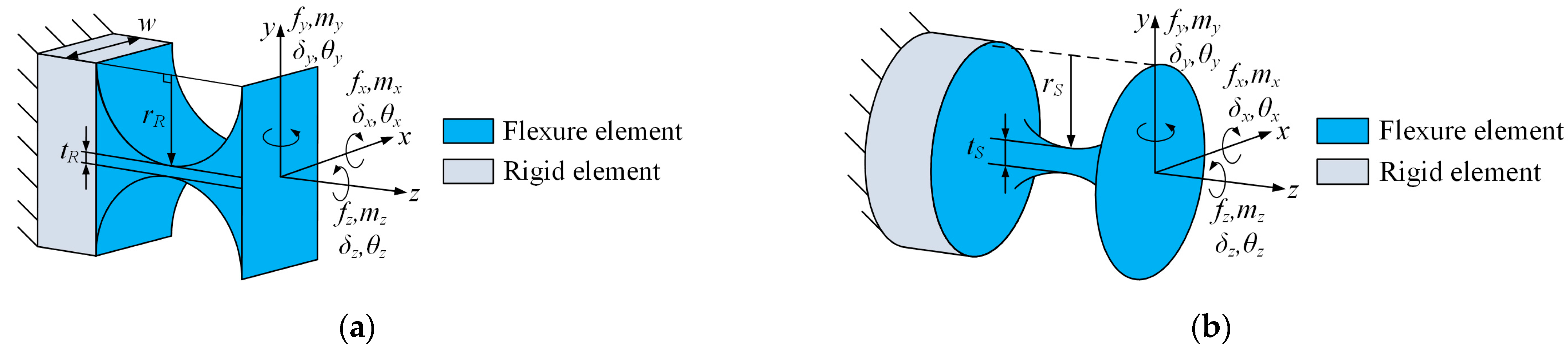
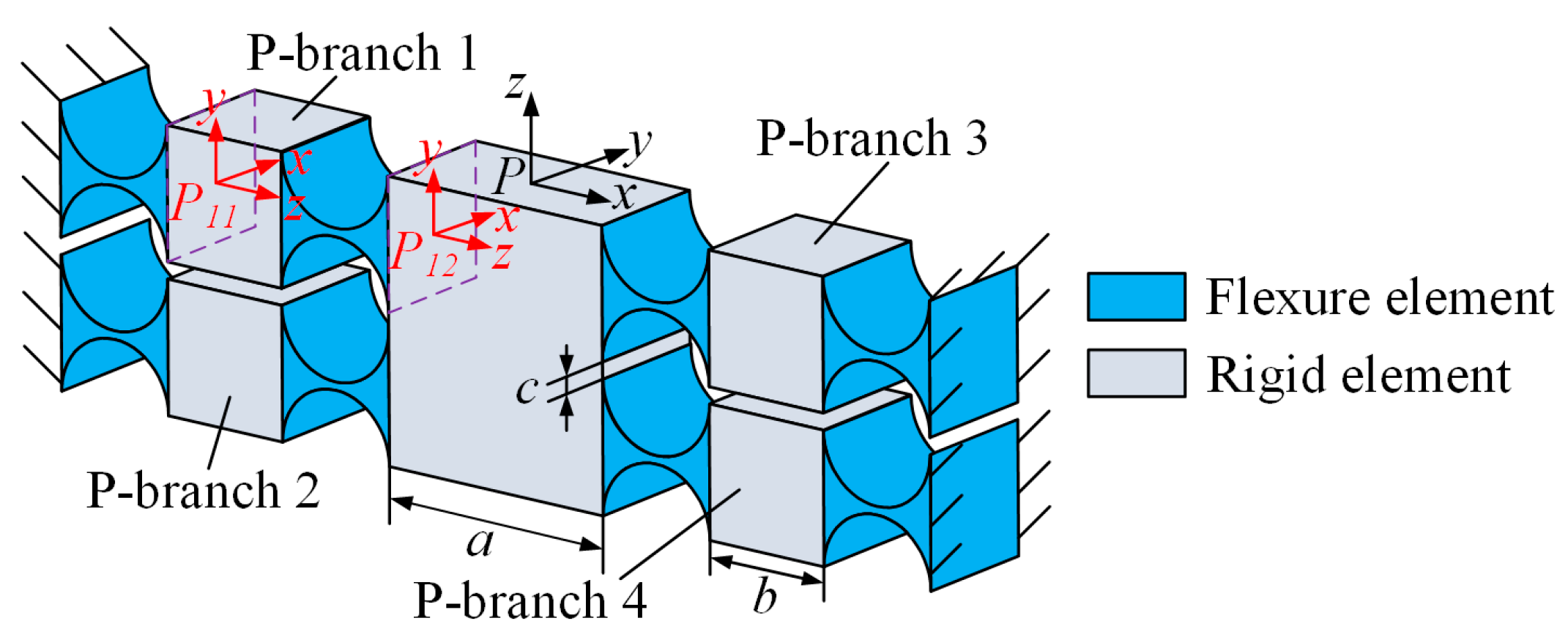
3.2. Compliance Matrix of Single Flexure Hinge or Compliant Element
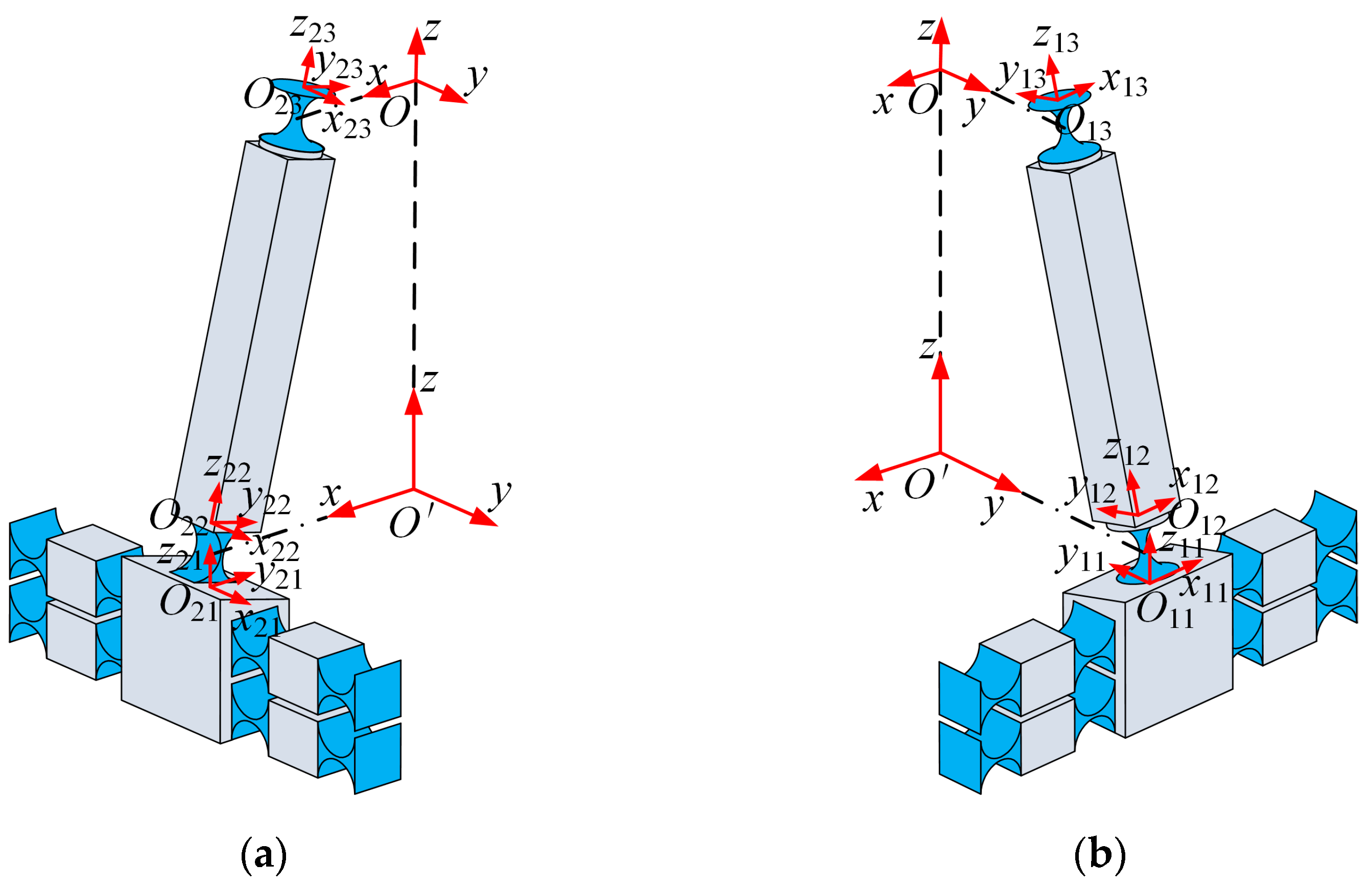
3.3. Compliance Modeling of Single Branch
3.4. Compliance Model of the Micromanipulator
3.5. Verification of Effectiveness of the Compliance Model
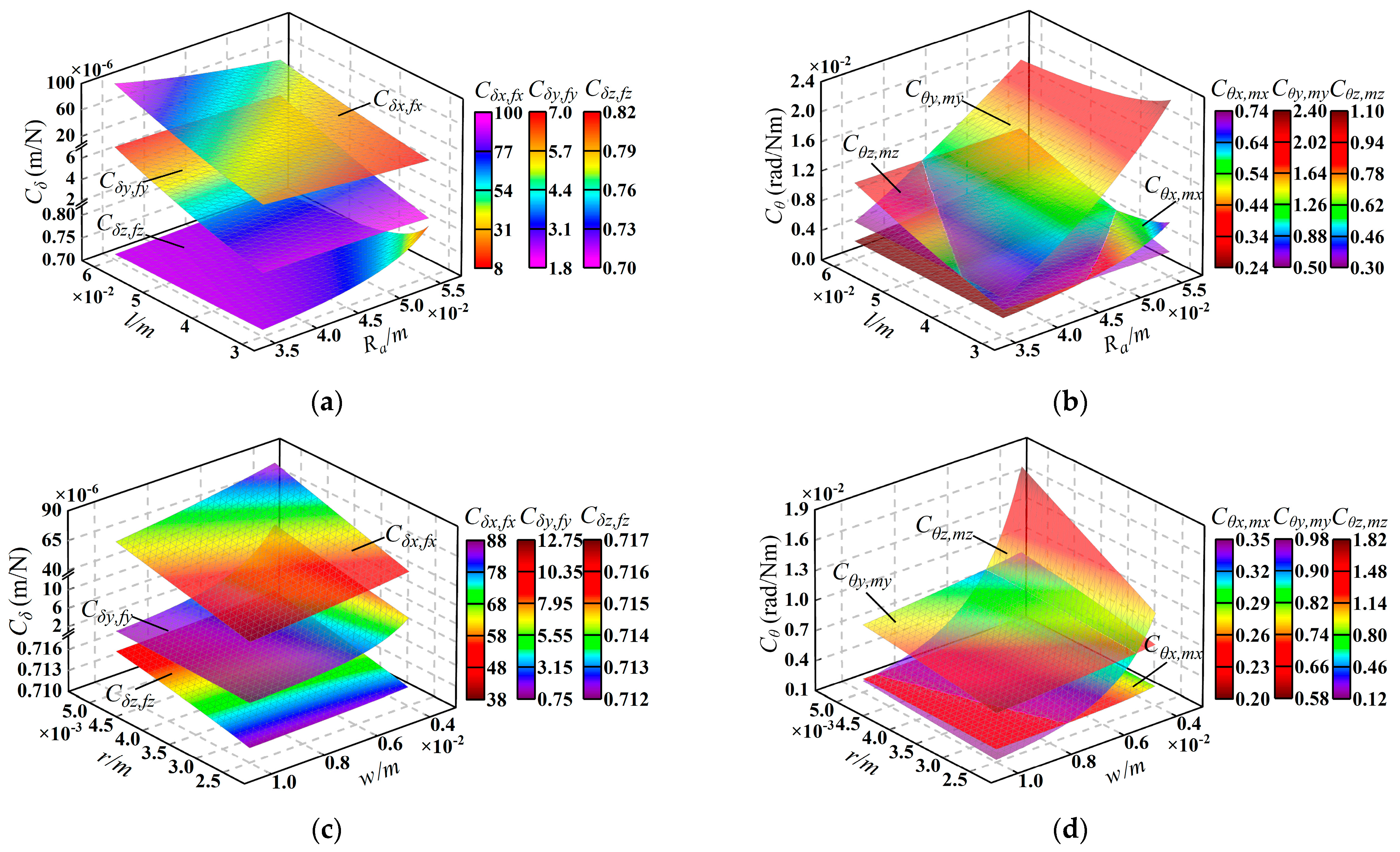
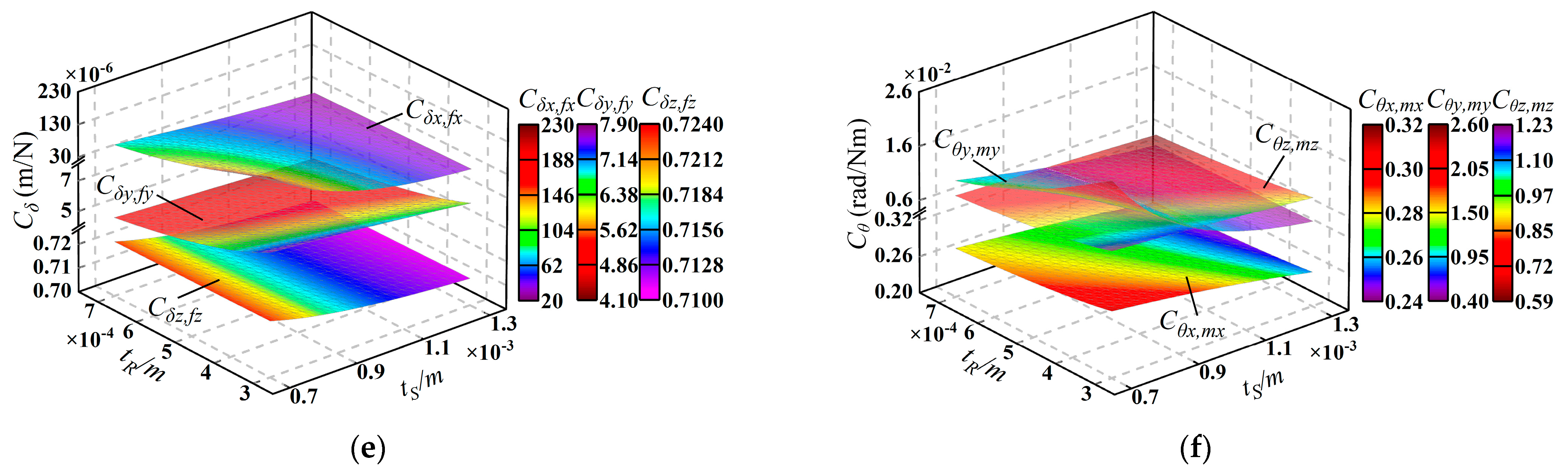
3.6. Analysis of Compliance Performance of 2PRS-2PSS compliant Parallel Micromanipulator
4. Kinetostatic Modeling of 2PRS-2PSS compliant Parallel Micromanipulator
4.1. Kinetostatic Modeling under Single Input Force
4.2. Kinetostatic Modeling of 2PRS-2PSS compliant Parallel Micromanipulator
5. Verification and Analysis of the Kinetostatic Model
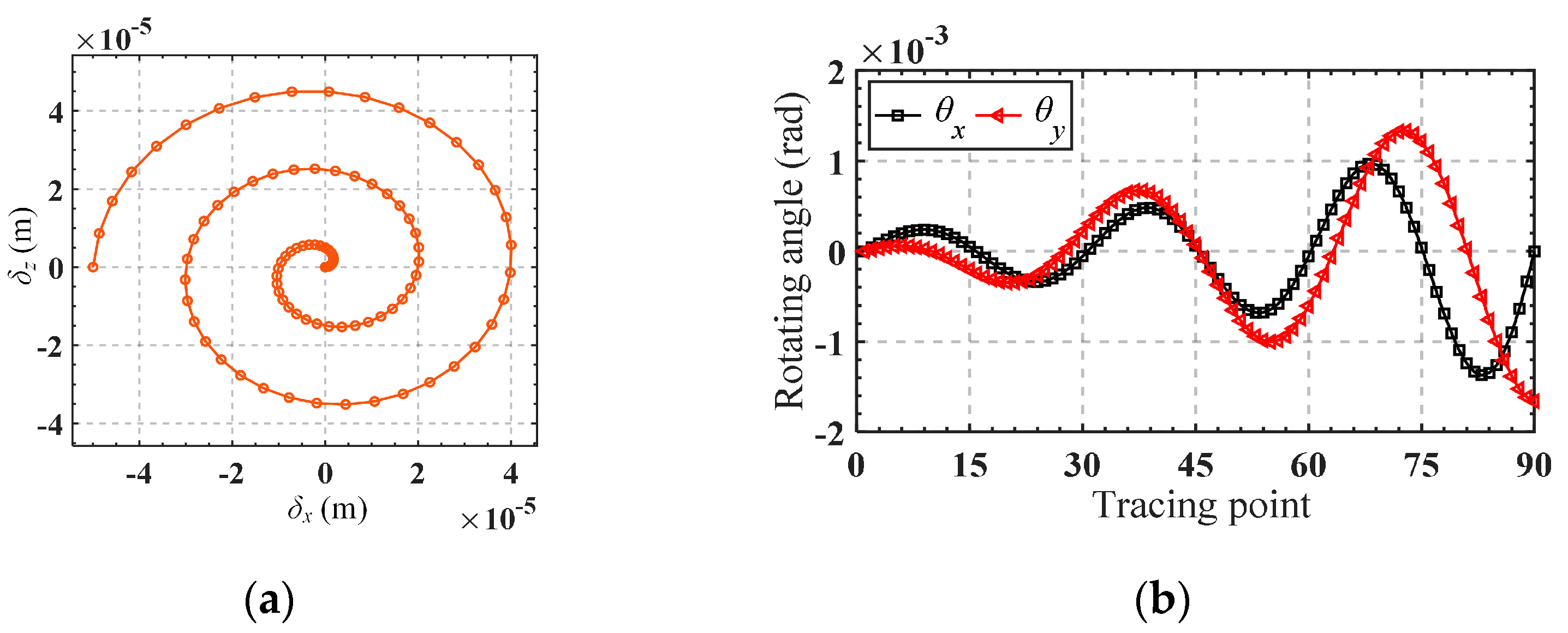
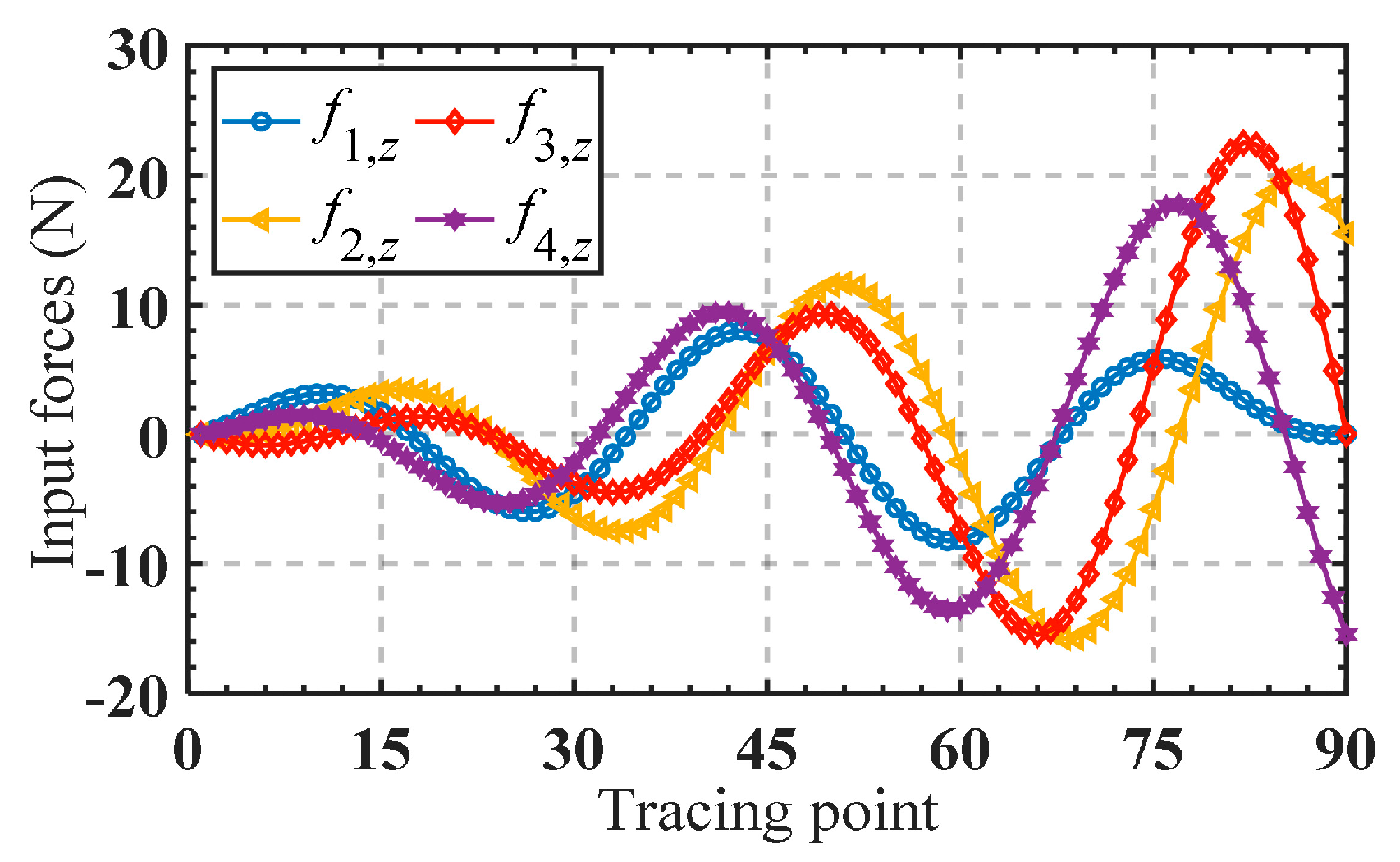
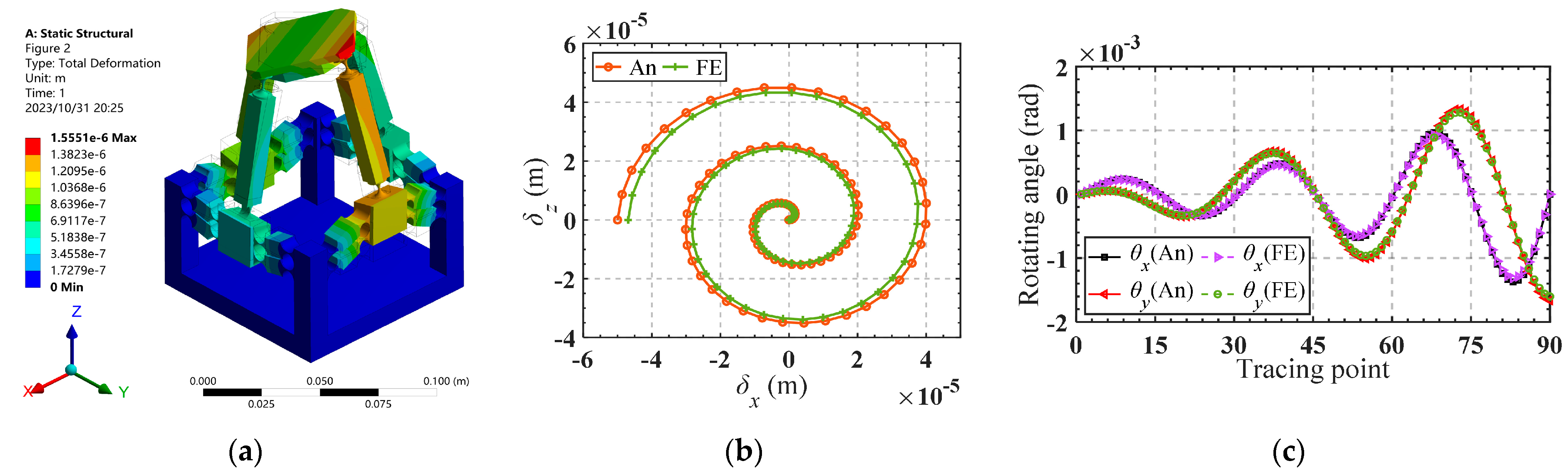
5.1. Numerical Calculation and Simulation Analysis of the Kinetostatic Model
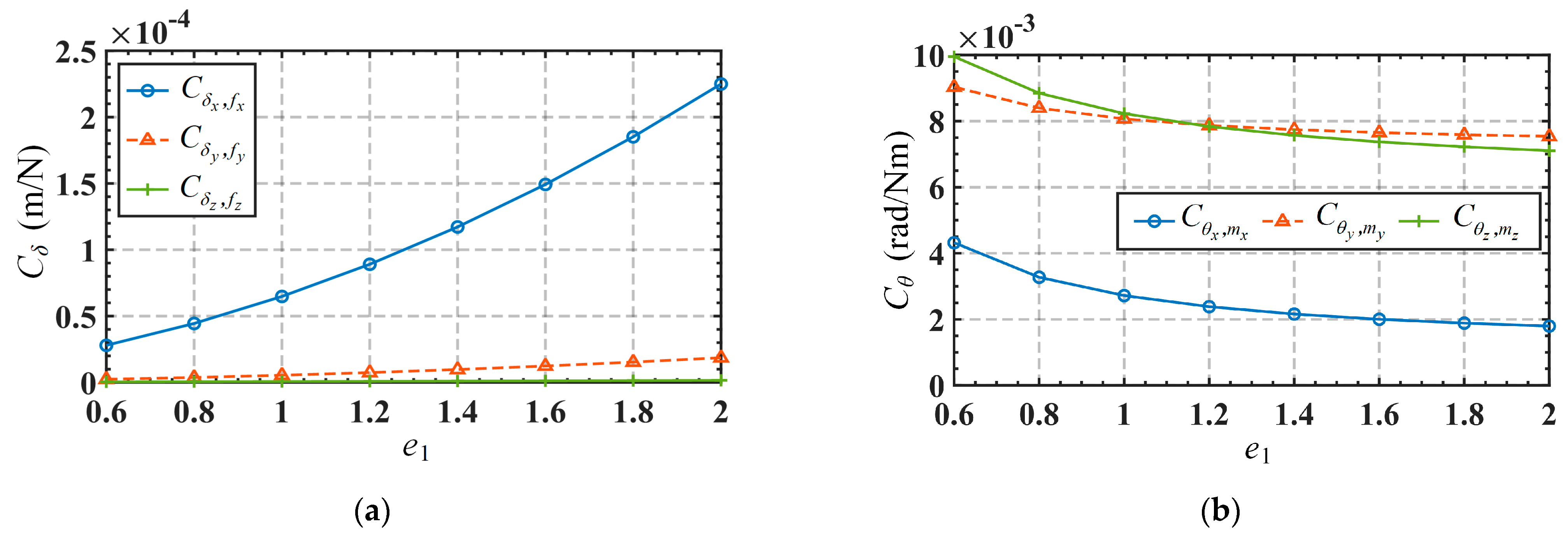
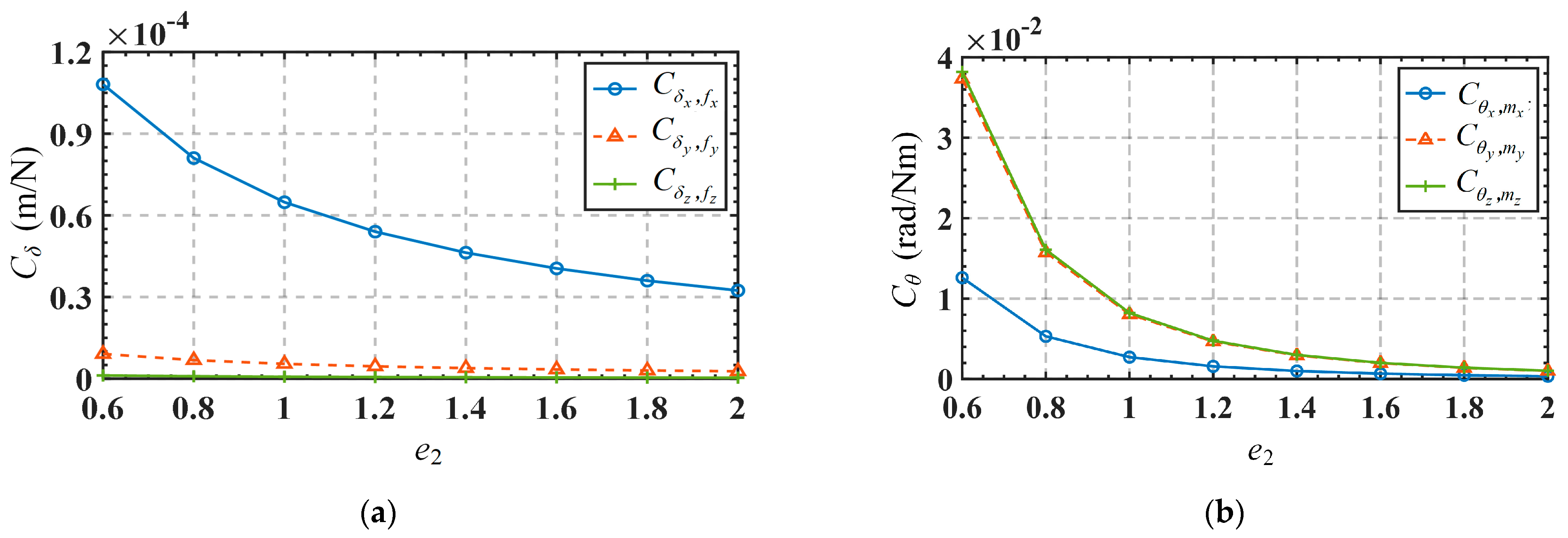
5.2. Analysis of the Influence of Parameters on the Kinetostatic Model
6. Conclusions
- (1)
- In the verification of the compliance model, comparison results show that the maximum relative errors of the elements on the main diagonal of the compliance model between the theoretical calculation and the finite element analysis do not exceed 7.2%, indicating the correctness of the compliance model. Analysis of the effect of the parameters on the compliance model indicates that the structural parameters of the flexure hinges have a more significant influence on the compliance of the micromanipulator compared to the dimensional parameters of the mechanism.
- (2)
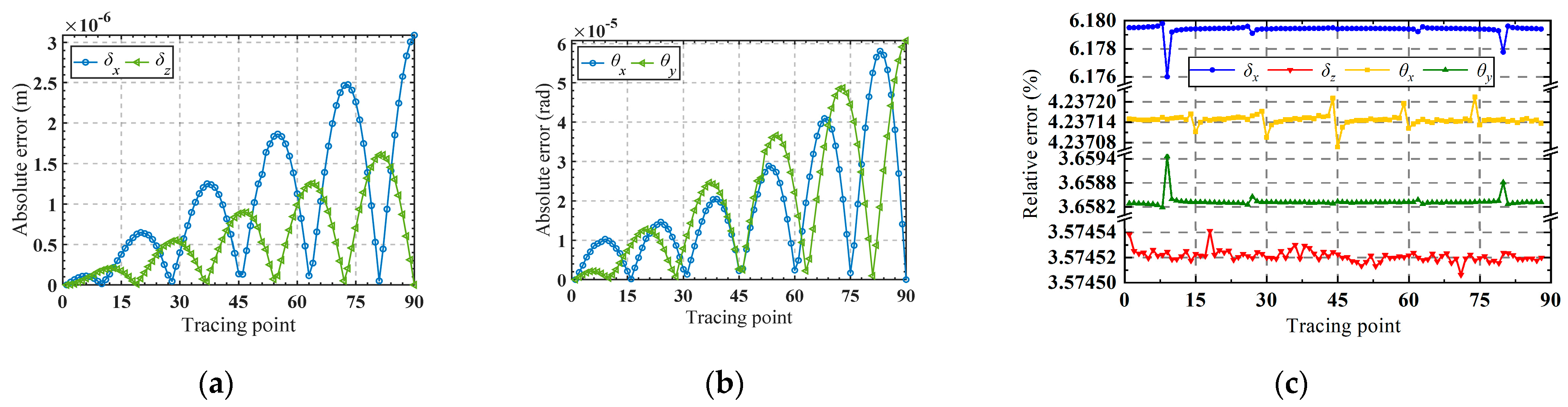
- By equating the 2PRS-2PSS micromanipulator to a spring system, the kinetostatic model of the micromanipulator is established based on the previously established compliance model according to Hooke’s law. In the validation of the kinetostatic model, comparison results show that the maximum relative errors between the theoretical analysis and the finite element analysis are within 6.18%, confirming the accuracy of the kinetostatic model.
- (3)
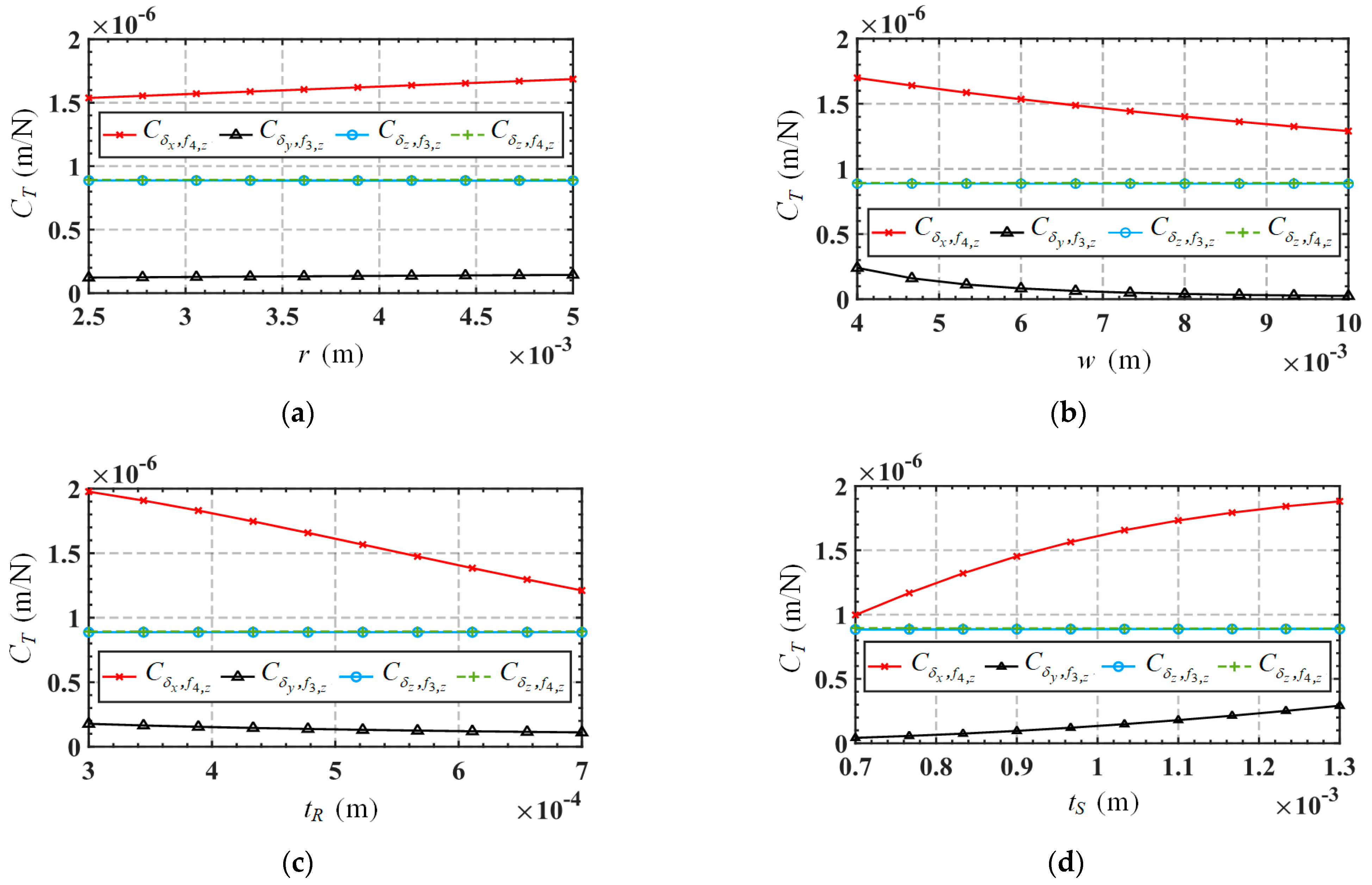
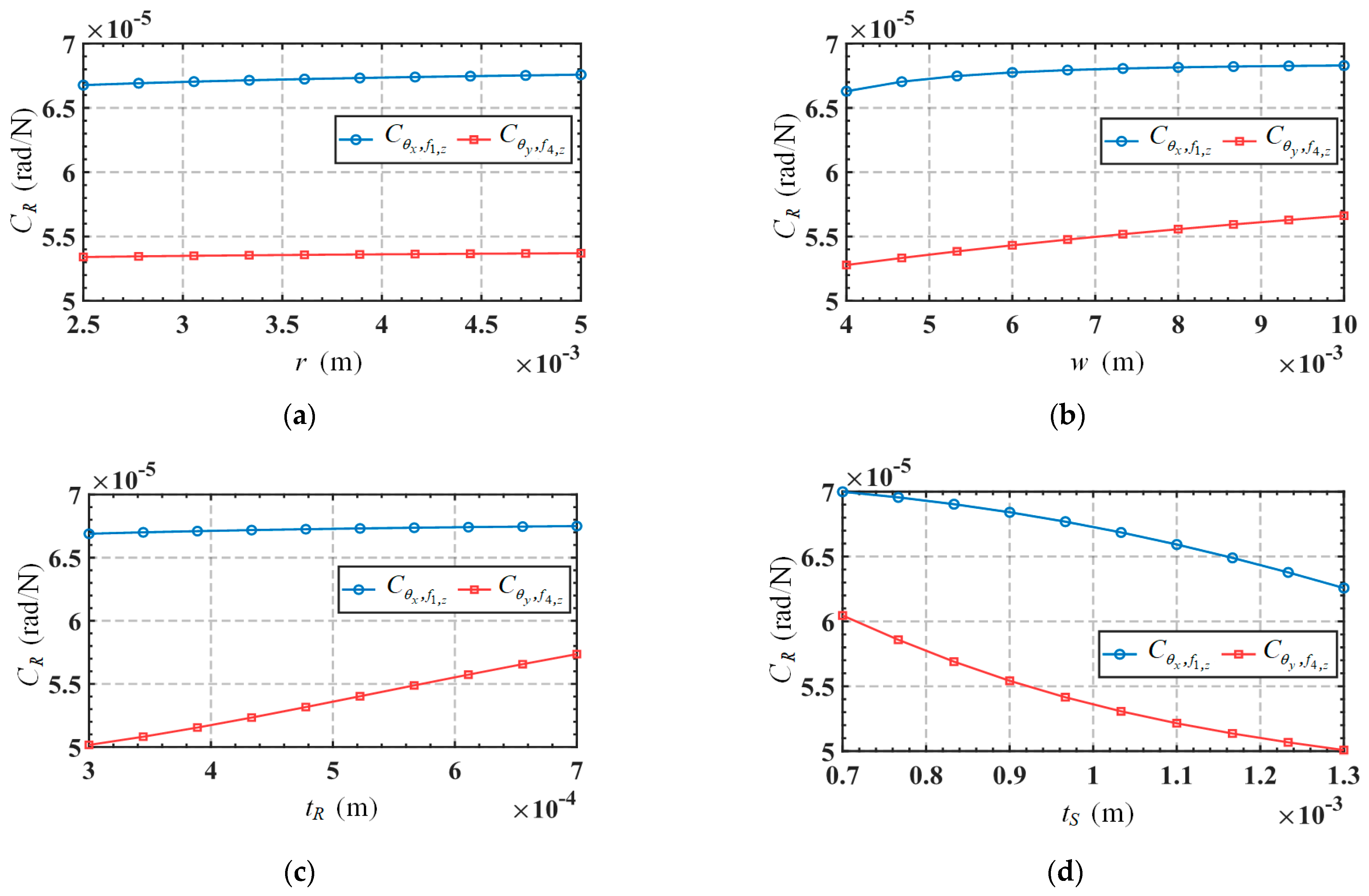
- In the analysis of the effect of the parameters on the kinetostatic model, it is found that compared to other parameters, the width (w) of the flexure revolute hinge and the cutting thickness (tS) of the flexure spherical hinge has the most significant influence on the parasitic displacement. Adjusting these parameters by increasing w and reducing tS can effectively minimize the parasitic displacement of the mechanism, thereby improving motion accuracy.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Li, H.; Hao, G.; Yu, J.; Deng, Z.; Song, Z. Systematic Approach to the Design of Spatial Translational Compliant Parallel Mechanisms. J. Mech. Eng. 2018, 54, 57–65. [Google Scholar] [CrossRef]
- Yang, M.; Du, Z.; Sun, L.; Wei, D. Optimal design, modeling and control of a long stroke 3-PRR compliant parallel manipulator with variable thickness flexure pivots. Robot. Comput. -Integr. Manuf. 2019, 60, 23–33. [Google Scholar] [CrossRef]
- Ren, J.; Cao, Q. Dynamic Modeling and Frequency Characteristic Analysis of a Novel 3-PSS Flexible Parallel Micro-Manipulator. Micromachines 2021, 12, 678. [Google Scholar] [CrossRef] [PubMed]
- Ren, J.; Li, Q.; Wu, H.; Cao, Q. Optimal Design for 3-PSS Flexible Parallel Micromanipulator Based on Kinematic and Dynamic Characteristics. Micromachines 2022, 13, 1457. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Liu, J.; Ding, H. Design and Analysis of a Novel Compliant Mechanism with RPR Degrees of Freedom. Chin. J. Mech. Eng. 2022, 35, 124. [Google Scholar] [CrossRef]
- Lin, J.; Qi, C.; Gao, F.; Yue, Y.; Hu, Y.; Wei, B. Modeling and Verification for a Three-Degree-of-Freedom Flexure-Based Planar Parallel Micro Manipulator. J. Mech. Robot. 2023, 15, 041006. [Google Scholar] [CrossRef]
- Li, R.; Zhu, Y.; Zhou, S.; He, Z.; Sun, J.; Liu, S. Modeling and control system design of 6-DOF bionic parallel mechanism with compliant modules. Trans. Inst. Meas. Control 2023, 46, 167–182. [Google Scholar] [CrossRef]
- Li, H.; Guo, F.; Wang, Y.; Wang, Z.; Li, C.; Ling, M.; Hao, G. Design and modeling of a compact compliant stroke amplification mechanism with completely distributed compliance for ground-mounted actuators. Mech. Mach. Theory 2022, 167, 104566. [Google Scholar] [CrossRef]
- Mishra, S.K.; Kumar, C.S. Compliance modeling of a full 6-DOF series–parallel flexure-based Stewart platform-like micromanipulator. Robotica 2022, 40, 3435–3462. [Google Scholar] [CrossRef]
- Tian, H.-b.; Ma, H.-w.; Xia, J.; Ma, K.; Li, Z.-z. Stiffness analysis of a metamorphic parallel mechanism with three configurations. Mech. Mach. Theory 2019, 142, 103595. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, Z.; Zhang, X. Stiffness analysis of corrugated flexure beam using stiffness matrix method. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 233, 1818–1827. [Google Scholar] [CrossRef]
- Zhang, D.; Zhao, L. Research of monolithic XY micro-adjustment mechanism based on compilance matrix. Chin. J. Sci. Instrum. 2014, 35, 269–275. [Google Scholar] [CrossRef]
- Li, Y.; Huang, J.; Tang, H. A Compliant Parallel XY Micromotion Stage With Complete Kinematic Decoupling. IEEE Trans. Autom. Sci. Eng. 2012, 9, 538–553. [Google Scholar] [CrossRef]
- Ren, J.; Li, Q. Analysis of Compliance and Kinetostatic of a Novel Class of n-4R Compliant Parallel Micro Pointing Mechanism. Micromachines 2022, 13, 1014. [Google Scholar] [CrossRef] [PubMed]
- Howell, L.L. Compliant Mechanisms. In 21st Century Kinematics; Springer: London, UK, 2013; pp. 189–216. [Google Scholar]
- Ling, M.; Howell, L.L.; Cao, J.; Chen, G. Kinetostatic and Dynamic Modeling of Flexure-Based Compliant Mechanisms: A Survey. Appl. Mech. Rev. 2020, 72, 030802. [Google Scholar] [CrossRef]
- Midha, A.; Bapat, S.G.; Mavanthoor, A.; Chinta, V. Analysis of a Fixed-Guided Compliant Beam With an Inflection Point Using the Pseudo-Rigid-Body Model Concept. J. Mech. Robot. 2015, 7, 031007. [Google Scholar] [CrossRef]
- Ni, L.; Chen, G.; Hong, K.; Wang, G. Design and development of a compliant piezoelectric microgripper based on three-stage amplification. Microsyst. Technol. 2023, 29, 939–952. [Google Scholar] [CrossRef]
- Wadikhaye, S.P.; Yong, Y.K.; Moheimani, S.O.R. Design of a compact serial-kinematic scanner for high-speed atomic force microscopy: An analytical approach. Micro Nano Lett. 2012, 7, 309–313. [Google Scholar] [CrossRef]
- Dong, W.; Chen, F.; Gao, F.; Yang, M.; Sun, L.; Du, Z.; Tang, J.; Zhang, D. Development and analysis of a bridge-lever-type displacement amplifier based on hybrid flexure hinges. Precis. Eng. 2018, 54, 171–181. [Google Scholar] [CrossRef]
- Wang, X.; Ding, Y.; Zeng, L.; Zhu, C.; Wu, B.; Xu, K. Kinetostatic Modeling of Continuum Delta Robot With Variable Curvature Continuum Joints. J. Mech. Robot. 2023, 15, 031005. [Google Scholar] [CrossRef]
- Ren, J.; Wu, H. Kinematic Modeling of a Novel 3-PSS/S Flexible Parallel Micro-turntable: Accuracy Comparison Between Pseudo-Rigid-Body Model-Based and Compliance Matrix Method-Based Models. Iran. J. Sci. Technol. Trans. Mech. Eng. 2023, 47, 2071–2088. [Google Scholar] [CrossRef]
- Ren, J.; Lan, A. Compliance Modeling and Kinetostatic Analysis of a Generalized 3-PSS Compliant Parallel Micro-Motion Platform. Micromachines 2024, 15, 354. [Google Scholar] [CrossRef] [PubMed]
- Ling, M.; Cao, J.; Howell, L.L.; Zeng, M. Kinetostatic modeling of complex compliant mechanisms with serial-parallel substructures: A semi-analytical matrix displacement method. Mech. Mach. Theory 2018, 125, 169–184. [Google Scholar] [CrossRef]
- Arredondo-Soto, M.; Cuan-Urquizo, E.; Gómez-Espinosa, A. The compliance matrix method for the kinetostatic analysis of flexure-based compliant parallel mechanisms: Conventions and general force–displacement cases. Mech. Mach. Theory 2022, 168, 104583. [Google Scholar] [CrossRef]
- Arredondo-Soto, M.; Cuan-Urquizo, E.; Gómez-Espinosa, A.; Roman-Flores, A.; Coronado, P.D.U.; Jimenez-Martinez, M. The compliant version of the 3-RRR spherical parallel mechanism known as “Agile-Eye”: Kinetostatic analysis and parasitic displacement evaluation. Mech. Mach. Theory 2023, 180, 105160. [Google Scholar] [CrossRef]
- Yu, J.; Bi, S.; Pei, X.; Zhao, H.; Zong, G. Flexure Design: Analysis and Synthesis of Compliance Mechanism Beijing; High Education Press: Beijing, China, 2018; p. 621. [Google Scholar]
- Gong, J.; Hu, G.; Zhang, Y. Closed Loop Design Method of Micro-driving Displacement Amplifier Module Targeting for Stiffness. J. Mech. Eng. 2012, 48, 58–64. [Google Scholar] [CrossRef]
- Zhu, Z.; To, S.; Zhu, W.-L.; Li, Y.; Huang, P. Optimum Design of a Piezo-Actuated Triaxial Compliant Mechanism for Nanocutting. IEEE Trans. Ind. Electron. 2018, 65, 6362–6371. [Google Scholar] [CrossRef]
- Yao, J.; Li, L.; Yang, W.; Zhao, Y. Analytical calculation of compliance matrix for right-circular flexure spherical hinge. Opt. Precis. Eng. 2014, 22, 1857–1863. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transformation Matrix | h1 | h2 | h3 | α | β | γ |
|---|---|---|---|---|---|---|
| 0 | 0 | |||||
| 0 | 0 | |||||
| 0 | 0 | |||||
| 0 | 0 |
| Transformation Matrix | x | y | z | α | β | γ |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | π | |||
| 0 | −θ | 0 | π | |||
| 0 | −θ | 0 | π | |||
| 0 | 0 | 0 | π/2 | |||
| 0 | −θ | 0 | π/2 | |||
| 0 | −θ | 0 | π/2 |
| Item | Values (mm) | Item | Values (mm) | Item | Values (mm) |
|---|---|---|---|---|---|
| Ra | 40 | rR | 3.75 | c | 1 |
| Rb | 25 | tR | 0.5 | rP | 3.75 |
| l | 52.5 | w | 5 | tP | 0.5 |
| rS | 3.75 | a | 20 | wP | 8 |
| tS | 1 | b | 10 |
| Type of Hinge | Material | Density (kg/m3) | Young’s Modulus (GPa) | Poisson Ratio |
|---|---|---|---|---|
| Spherical hinge | CuBe2 | 8000 | 128 | 0.3 |
| Revolute hinge | 65 Mn | 8000 | 206 | 0.3 |
| Compliance | An | FE | Relative Error |
|---|---|---|---|
| (m/N) | 0.00006483 | 0.00006668 | 2.77% |
| (m/N) | 0.00000545 | 0.00000587 | 7.13% |
| (m/N) | 0.00000072 | 0.00000069 | 3.43% |
| (rad/N) | 0.00272024 | 0.00263453 | 3.25% |
| (rad/N) | 0.00806618 | 0.00805665 | 0.12% |
| (rad/N) | 0.00822998 | 0.00864432 | 4.79% |
| Item | Variation Range (mm) | Item | Variation Range (mm) |
|---|---|---|---|
| l | 30~60 | w | 4~10 |
| Ra | 35~55 | tR | 0.3~0.7 |
| r (rS, rR) | 2.5~5 | tS | 0.7~1.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, J.; Jiang, H. Compliance and Kinetostatics of a Novel 2PRS-2PSS Compliant Parallel Micromanipulator: Modeling and Analysis. Micromachines 2024, 15, 526. https://doi.org/10.3390/mi15040526
Ren J, Jiang H. Compliance and Kinetostatics of a Novel 2PRS-2PSS Compliant Parallel Micromanipulator: Modeling and Analysis. Micromachines. 2024; 15(4):526. https://doi.org/10.3390/mi15040526
Chicago/Turabian StyleRen, Jun, and Hui Jiang. 2024. "Compliance and Kinetostatics of a Novel 2PRS-2PSS Compliant Parallel Micromanipulator: Modeling and Analysis" Micromachines 15, no. 4: 526. https://doi.org/10.3390/mi15040526
APA StyleRen, J., & Jiang, H. (2024). Compliance and Kinetostatics of a Novel 2PRS-2PSS Compliant Parallel Micromanipulator: Modeling and Analysis. Micromachines, 15(4), 526. https://doi.org/10.3390/mi15040526