A New Concept of a Drug Delivery System with Improved Precision and Patient Safety Features


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufactor’s Data | Medtronic | Medtronic | Codman |
|---|---|---|---|
| Device name | Synchromed II | IsoMed | Medstream |
| Flow rate | 48–1000 μL/h | 20.8–62.5 μL/h | 4–167 μL/h |
| Flow rate accuracy | 14.5% error | 15% error | 10% error |

2. Experimental Section
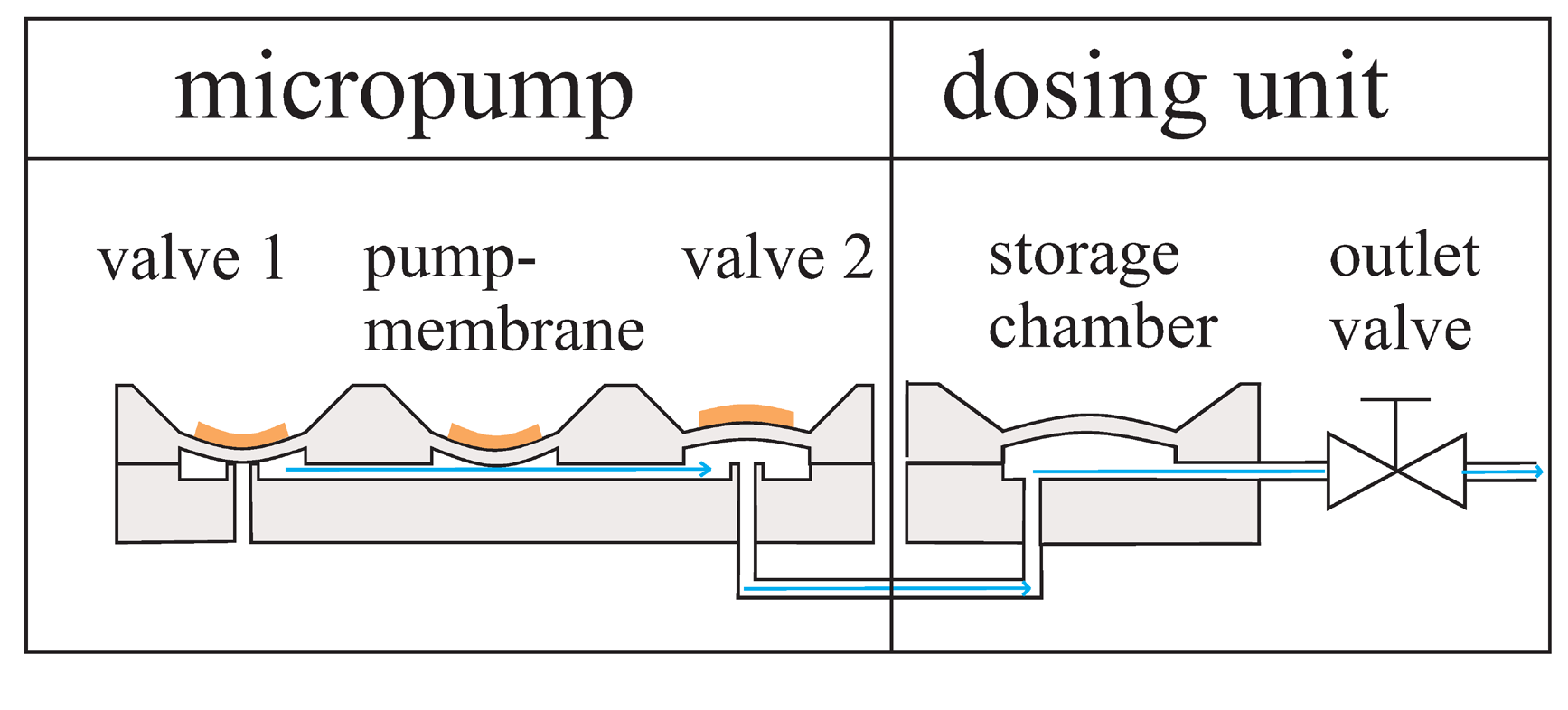
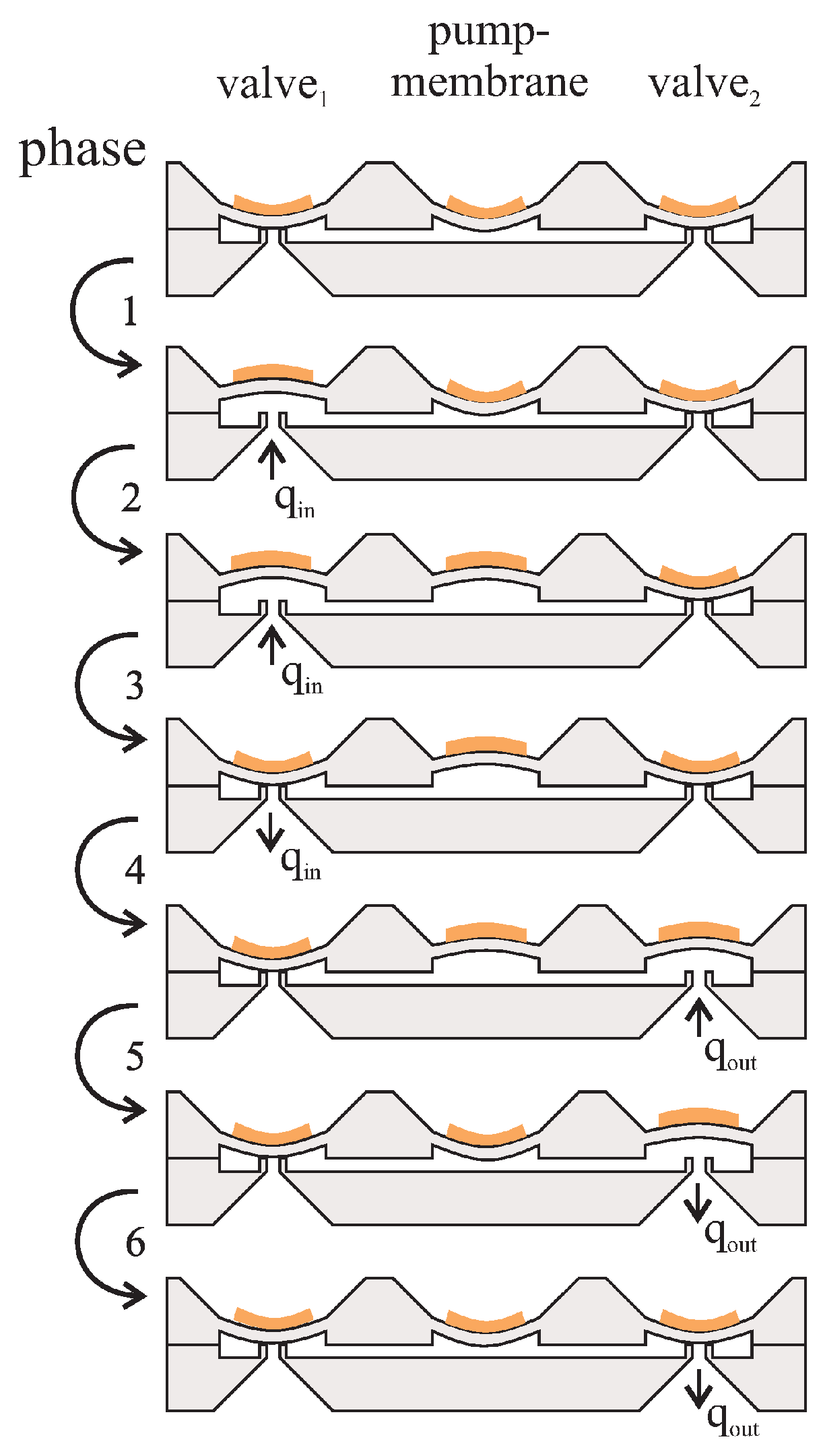
2.1. Working Principle


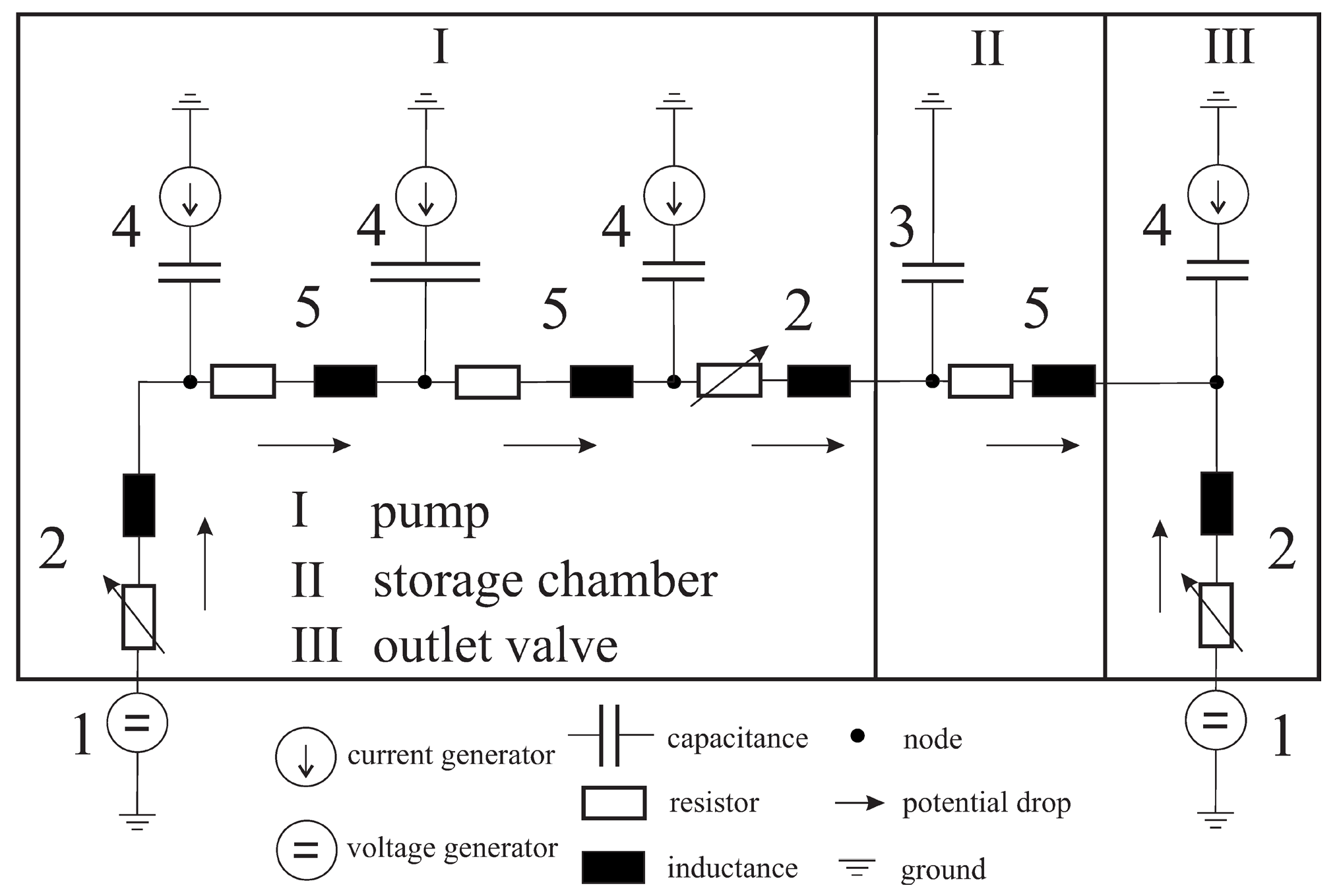
2.2. Lumped Parameter Model

2.2.1. Fluidic Calculation


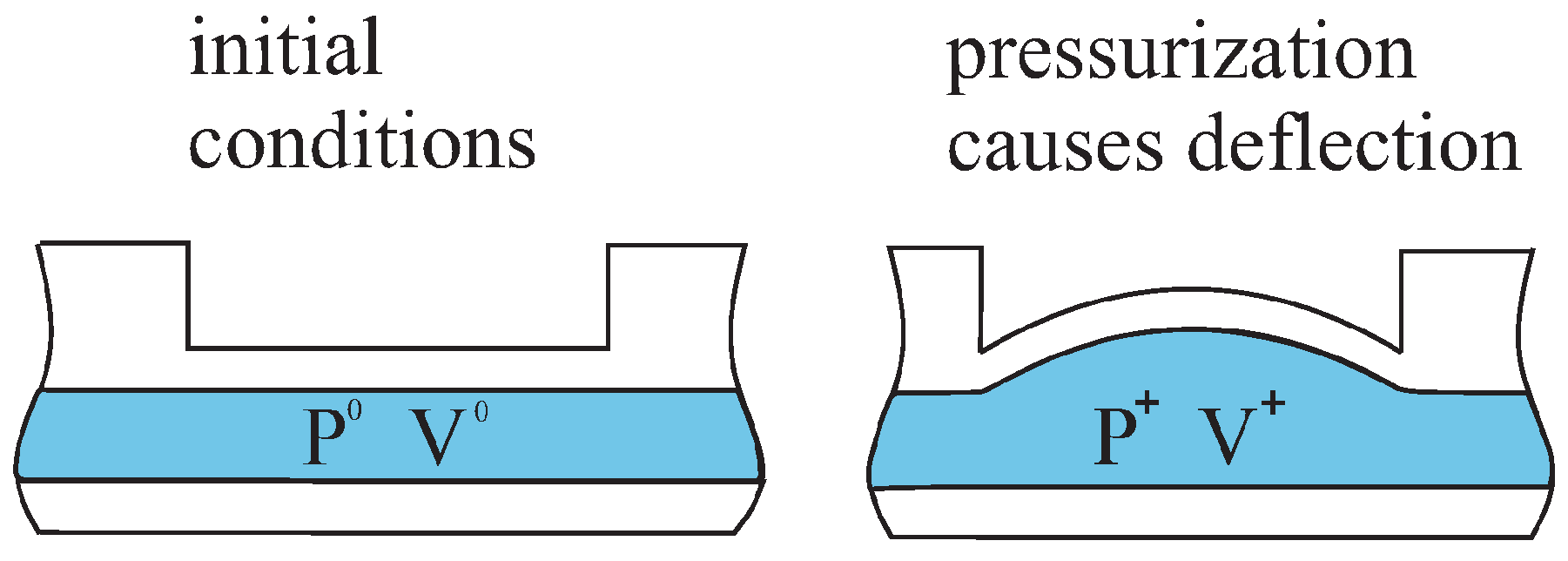
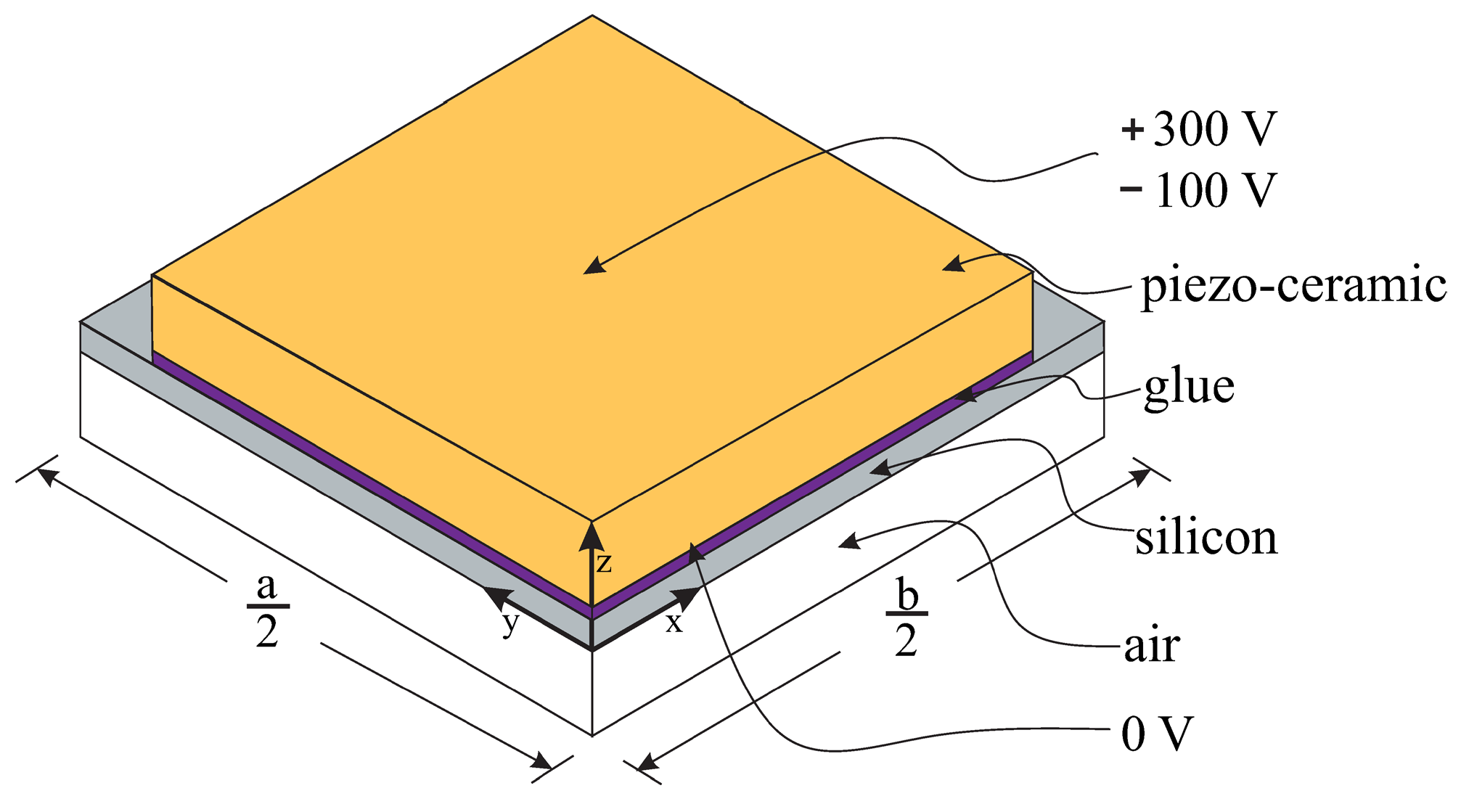
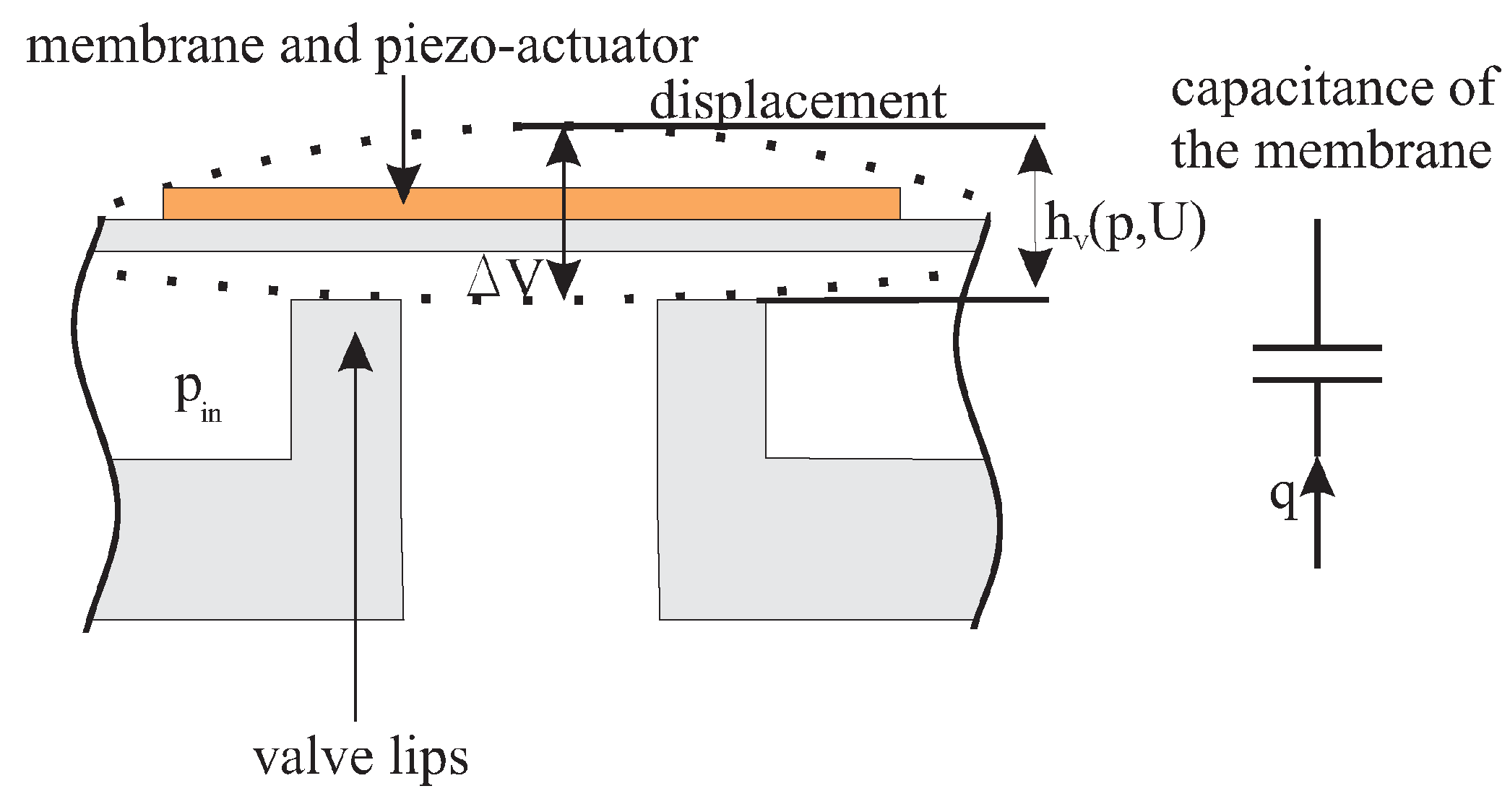
2.2.2. Mechanical Simulation

| Factor | dV/dp = Cp | dV/dU |
|---|---|---|
| Generated volume: valve membrane | 0.072 μL/bar | −0.0014 μL/V |
| Generated volume: pump membrane | 1.027 μL/bar | −0.007 μL/V |
| Generated volume: storage membrane | 18.8 μL/bar | 0 |
| Factor | dh/dp | dh/dU |
|---|---|---|
| Gap of the valve | 2.97614 μm/bar | −0.05027 μm/V |
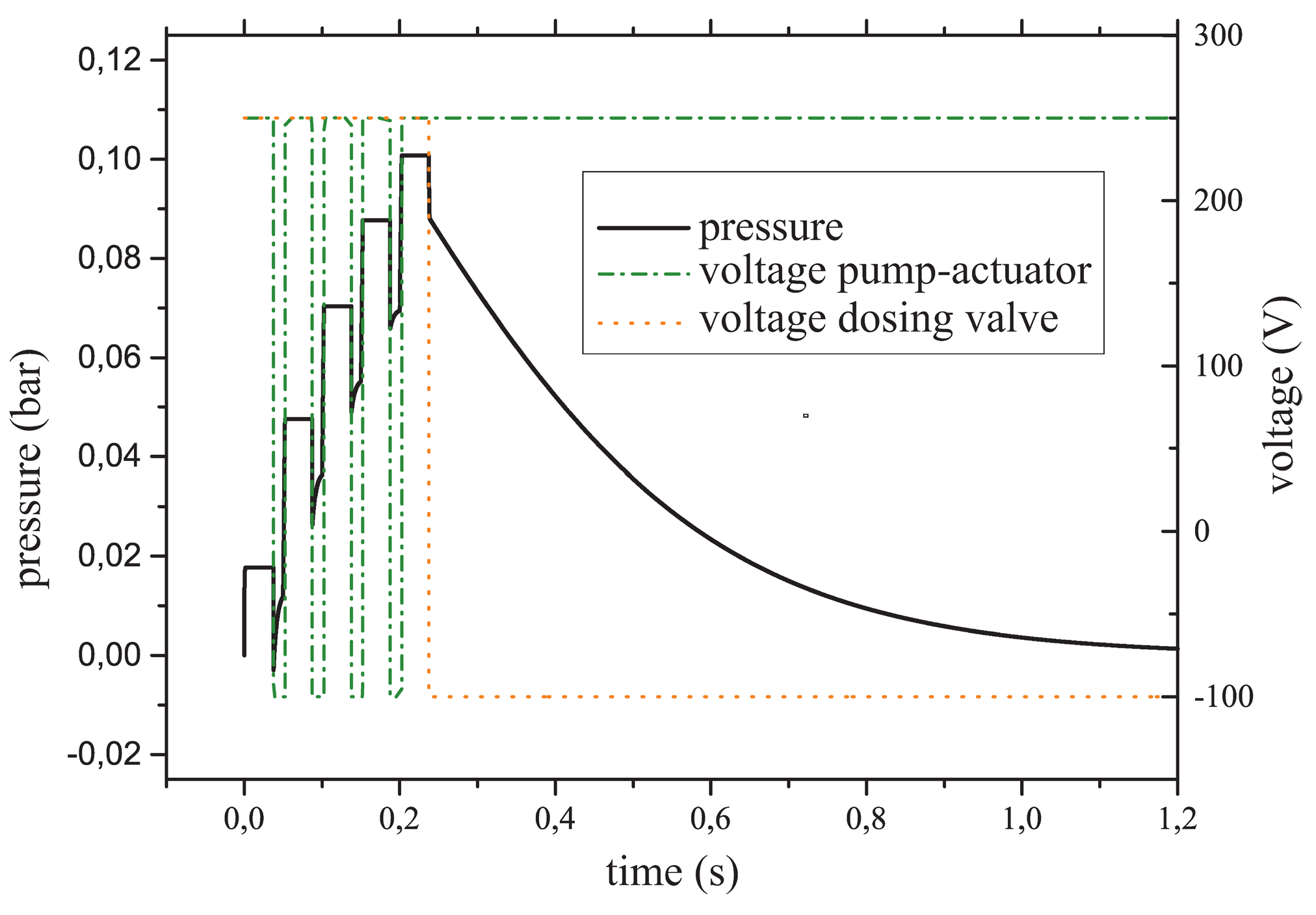
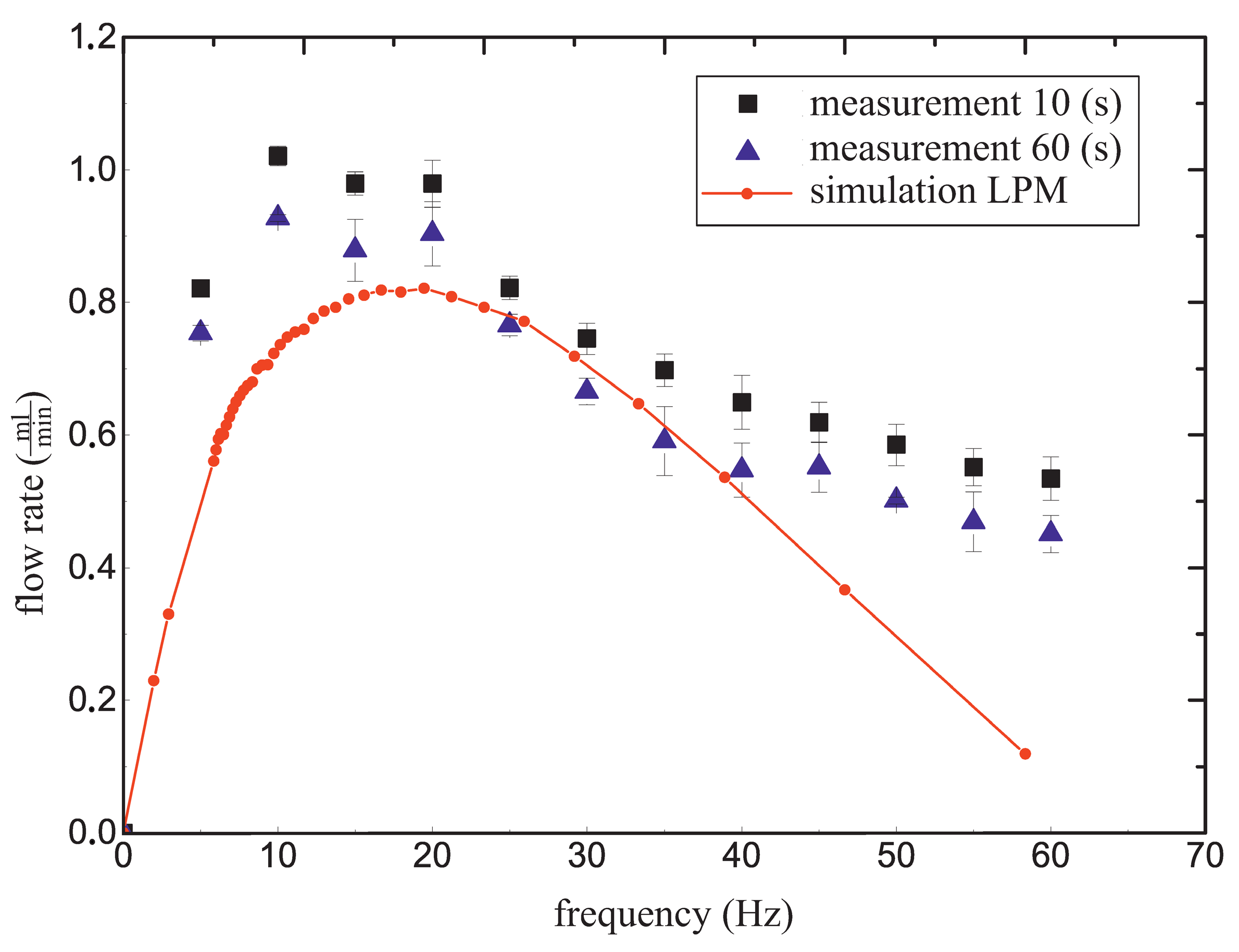
2.3. Simulation Results



3. Results and Discussion
3.1. Measurement Setup
3.1.1. Measurement Setup for Flow Rate Characterization
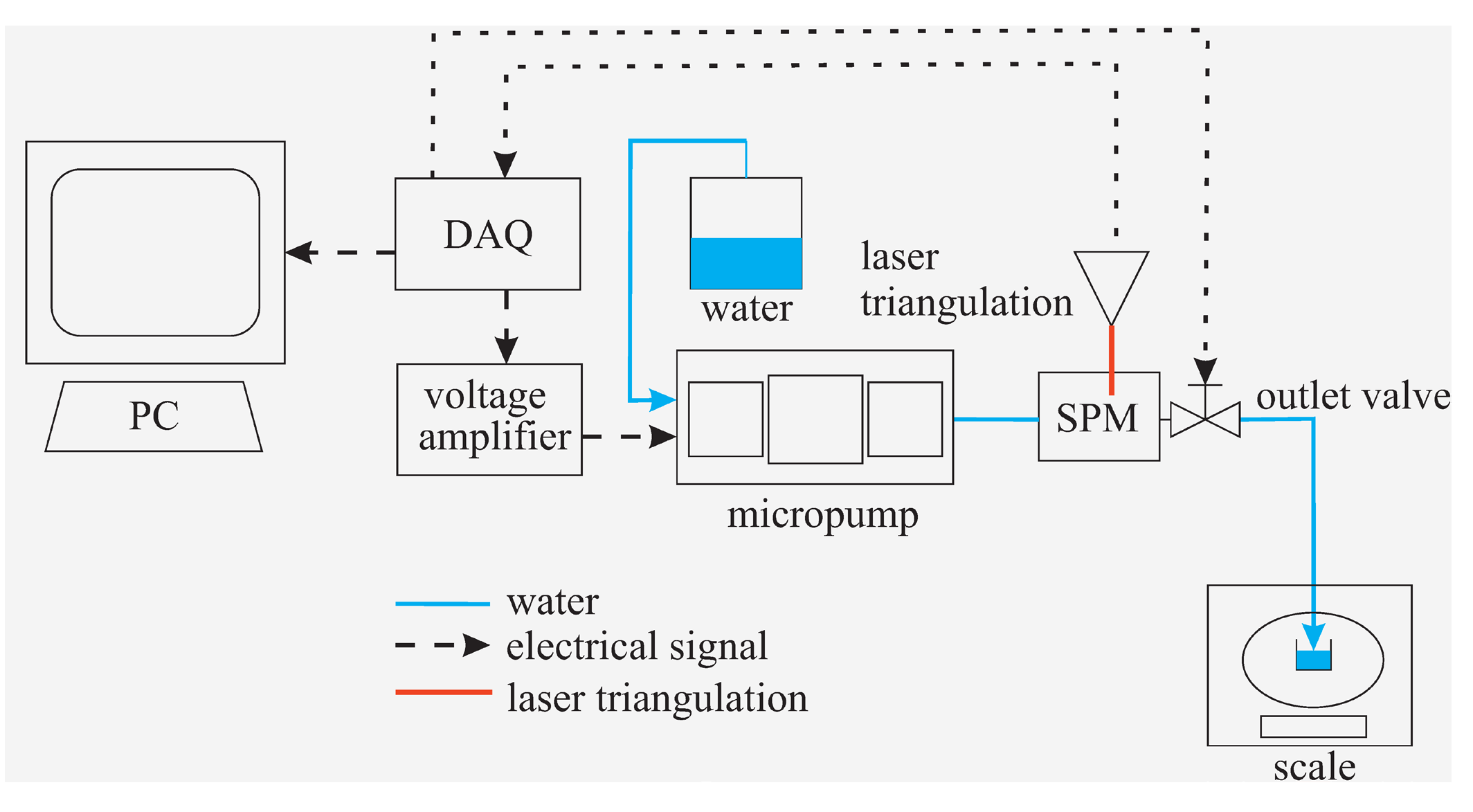
3.1.2. Measurement Setup for the Drug Delivery System

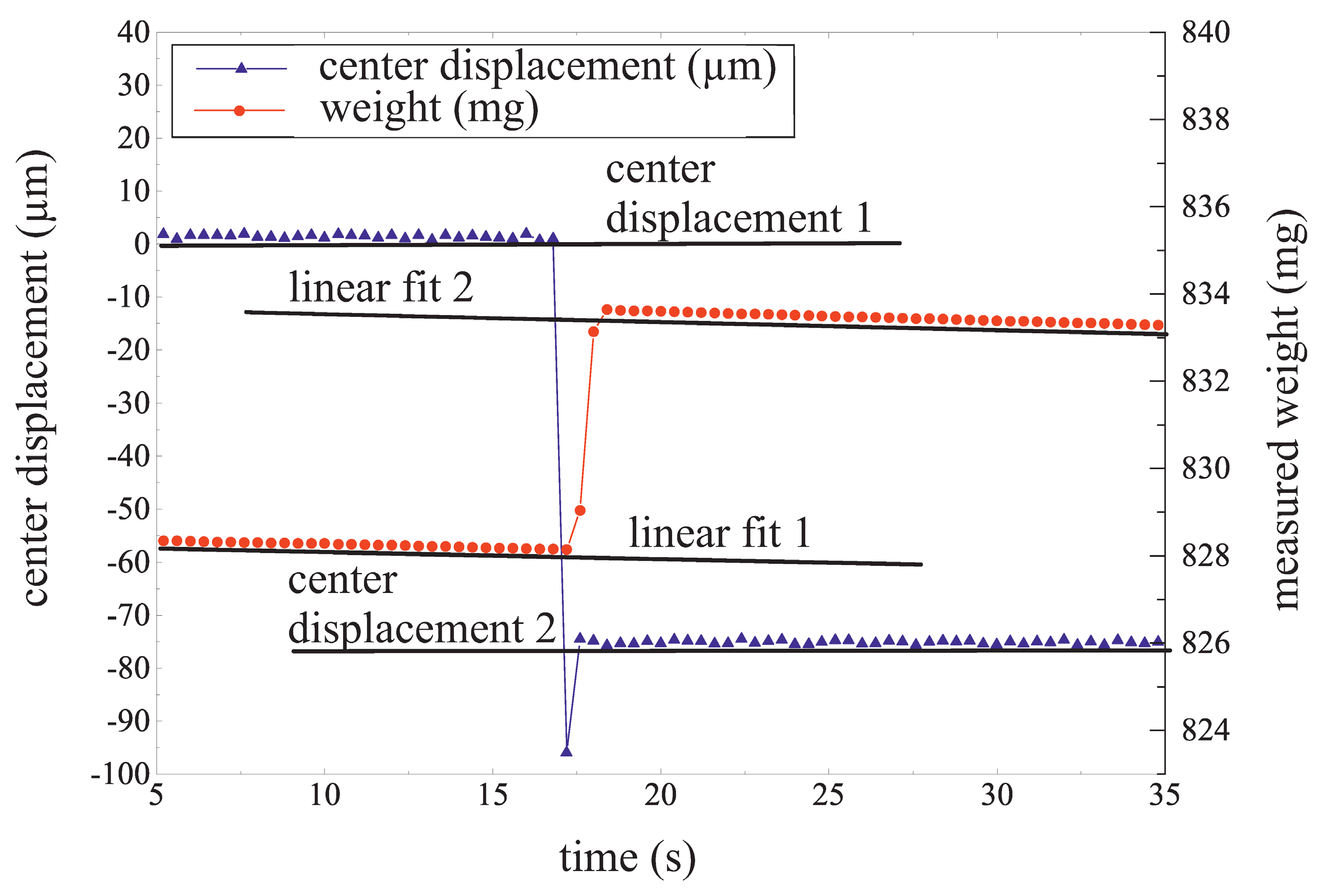
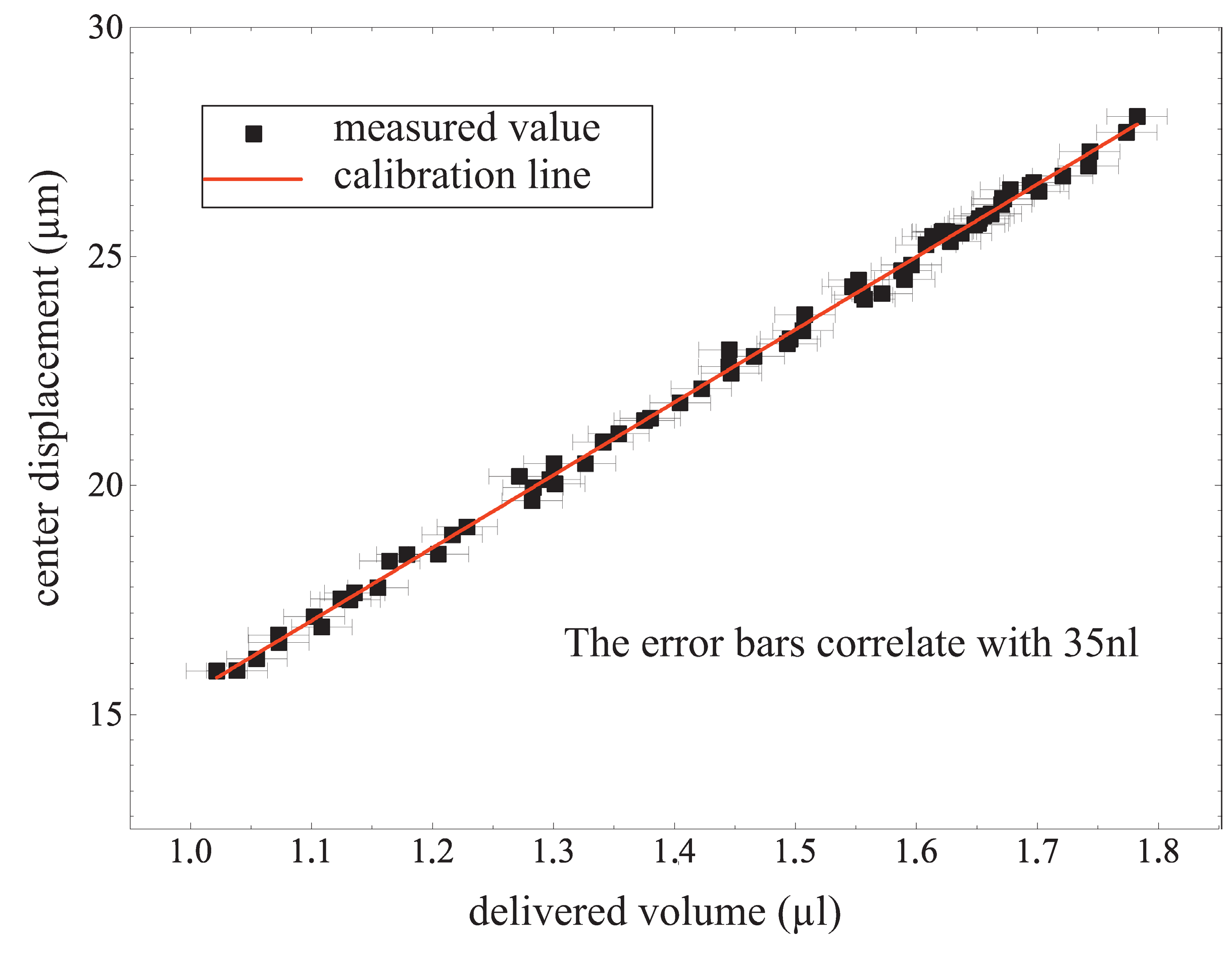
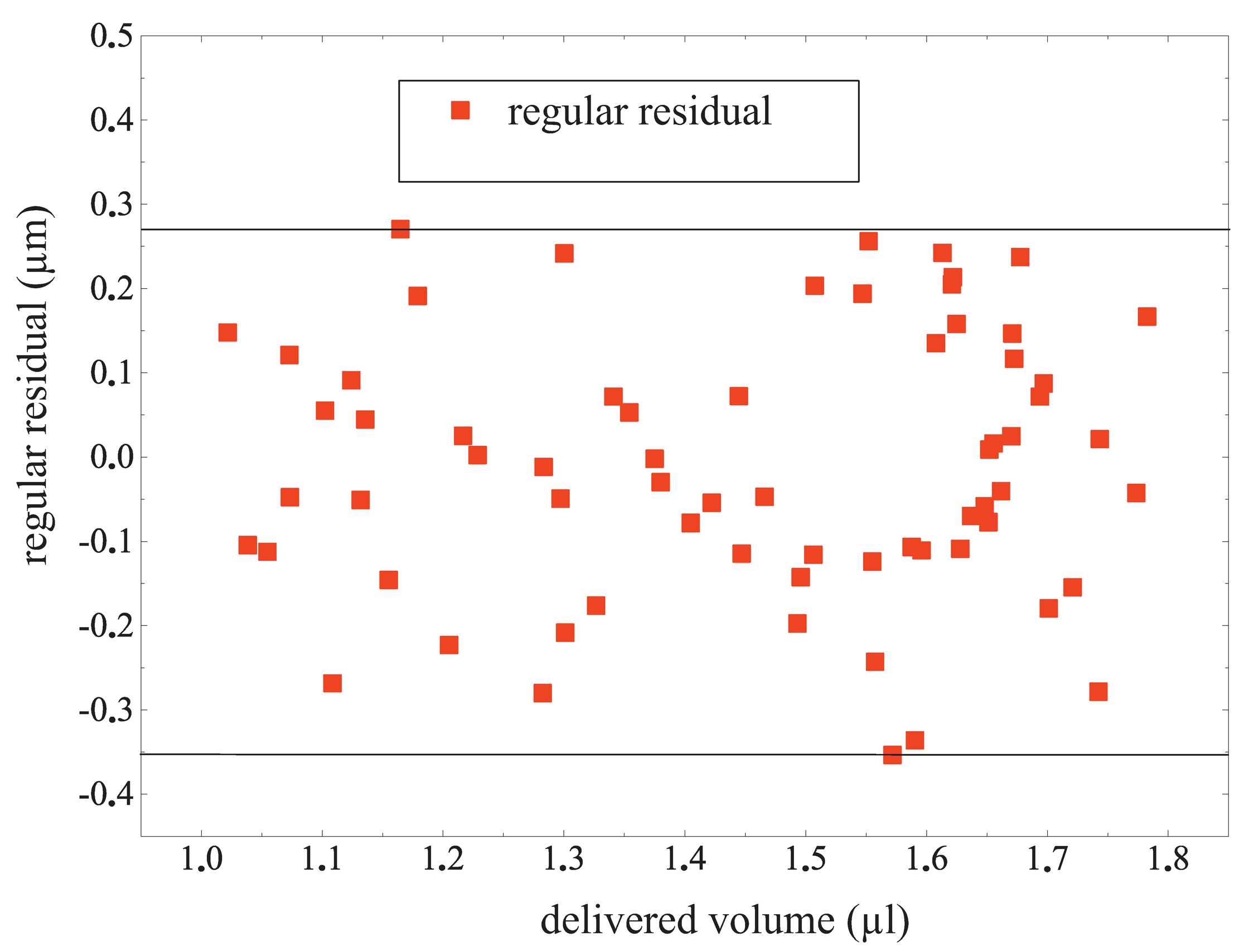
3.2. Measurement Results







3.3. Discussion
4. Conclusions
5. Outlook
Author Contributions
Appendix A1. List of Symbols
| Symbol | Definition | Unit |
| A | Area | m2 |
| C | Fluidic capacitance | m5/N |
| hv | Gap of the valve | M |
| K | Stiffness | N/m |
| L | Fluidic inductance | kg/m4 |
| M | Mass | Kg |
| P | Pressure | Bar |
| V | Volume | m3 |
| Q | Fluidic flow | m3/s |
| R | Fluidic resistance | N·s/m5 |
| Ρ | Density | kg/m3 |
| Τ | Time constant | S |
| Χ | Friction coefficient | N·s/m |
Conflicts of Interest
References
- Wang, W.; Soper, S.A. Bio-MEMS: Technologies and Applications; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Stevenson, C.L.; Santini, J.T., Jr.; Langer, R. Reservoir-based drug delivery systems utilizing microtechnology. Adv. Drug Deliv. Rev. 2012, 64, 1590–1602. [Google Scholar] [CrossRef] [PubMed]
- Jain, K.K. Textbook of Personalized Medicine; Springer: New York, NY, USA, 2009. [Google Scholar]
- Meng, E.; Hoang, T. MEMS-enabled implantable drug infusion pumps for laboratory animal research, preclinical, and clinical applications. Adv. Drug Deliv. Rev. 2012, 64, 1628–1638. [Google Scholar] [CrossRef] [PubMed]
- Receveur, R.A.M.; Lindemans, F.W.; de Rooij, N.F. Microsystem technologies for implantable applications. J. Micromech. Microeng. 2007, 17, R50–R80. [Google Scholar] [CrossRef]
- Goldschmidtböing, F.; Doll, A.; Heinrichs, M.; Woias, P.; Schrag, H.-J.; Hopt, U.T. A generic analytical model for micro-diaphragm pumps with active valves. J. Micromech. Microeng. 2005, 15, 673. [Google Scholar] [CrossRef]
- Woias, P. Micropumps-summarizing the first two decades. In Proceeding of SPIE 4560, Microfluidics and BioMEMS, San Francisco, CA, USA, 22 October 2001.
- Smits, J.G. Piezoelectric micropump with three valves working peristaltically. Sens. Actuators A Phys. 1990, 21, 203–206. [Google Scholar] [CrossRef]
- Kan, J.; Tang, K.; Liu, G.; Zhu, G.; Shao, C. Development of serial-connection piezoelectric pumps. Sens. Actuators A Phys. 2008, 144, 321–327. [Google Scholar] [CrossRef]
- Kan, J.; Tang, K.; Ren, Y.; Zhu, G.; Li, P. Study on a piezohydraulic pump for linear actuators. Sens. Actuators A Phys. 2009, 149, 331–339. [Google Scholar] [CrossRef]
- Geipel, A.; Goldschmidtböing, F.; Doll, A.; Jantscheff, P.; Esser, N.; Massing, U.; Woias, P. An implantable active microport based on a self-priming high-performance two-stage micropump. Sens. Actuators A Phys. 2008, 145–146, 414–422. [Google Scholar] [CrossRef]
- Français, O.; Dufour, I. Dynamic simulation of an electrostatic micropump with pull-in and hysteresis phenomena. Sens. Actuators A Phys. 1998, 70, 56–60. [Google Scholar] [CrossRef]
- Lin, Q.; Yang, B.; Xie, J.; Tai, Y.C. Dynamic simulation of a peristaltic micropump considering coupled fluid flow and structural motion. J. Micromech. Microeng. 2007, 17, 220. [Google Scholar] [CrossRef]
- Bourouina, T.; Grandchamp, J.P. Modeling micropumps with electrical equivalent networks. J. Micromech. Microeng. 1996, 6, 398–404. [Google Scholar] [CrossRef]
- Hamdan, M.N.; Abdallah, S.; Al-Qaisia, A. Modeling and study of dynamic performance of a valveless micropump. J. Sound Vib. 2010, 329, 3121–3136. [Google Scholar] [CrossRef]
- Oertel, H.; Böhle, M.; Dohrmann, U. Strömungsmechanik: Grundlagen, Grundgleichungen, Lösungsmethoden, Softwarebeispiele, 4th ed.; Springer Vieweg: Berlin, Germany, 2009. [Google Scholar]
- Truckenbrodt, E. Fluidmechanik, 4th ed.; Springer Vieweg: Berlin, Germany, 2013. [Google Scholar]
- Goldschmidtböing, F. Entwurf, Design und Experimentelle Charakterisierung von Mikro-Freistrahldispensern. Ph.D. Thesis, Universitätsbibliothek Freiburg, Freiburg, Germany, 2004. [Google Scholar]
- Thoma, F.; Feth, H.F.; Goldschmidtboeing, F.; Woias, P. Integrated fluidic system for an artificial sphincter prosthesis. In Proceeding of 2012 IEEE Micro- and Nanoengineering in Medicine Conference, Maui, HI, USA, 3–7 December 2012.
- Biancuzzi, G.; Lemke, T.; Woias, P.; Ruthmann, O.; Schrag, H.J.; Vodermayer, B.; Goldschmidtboeing, F. Design and simulation of advanced charge recovery piezoactuator drivers. J. Micromech. Microeng. 2010, 20, 105022. [Google Scholar] [CrossRef]
- Ko, W.; Hynecek, J.; Boettcher, S. Development of a miniature pressure transducer for biomedical applications. IEEE Trans. Electron Devices 1979, 26, 1896–1905. [Google Scholar] [CrossRef]
- Yu, J.; Wang, W.; Lu, K.; Mei, D.; Chen, Z. A planar capacitive sensor for 2D long-range displacement measurement. J. Zhejiang Univ. Sci C 2013, 14, 252–257. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thoma, F.; Goldschmidtböing, F.; Woias, P. A New Concept of a Drug Delivery System with Improved Precision and Patient Safety Features. Micromachines 2015, 6, 80-95. https://doi.org/10.3390/mi6010080
Thoma F, Goldschmidtböing F, Woias P. A New Concept of a Drug Delivery System with Improved Precision and Patient Safety Features. Micromachines. 2015; 6(1):80-95. https://doi.org/10.3390/mi6010080
Chicago/Turabian StyleThoma, Florian, Frank Goldschmidtböing, and Peter Woias. 2015. "A New Concept of a Drug Delivery System with Improved Precision and Patient Safety Features" Micromachines 6, no. 1: 80-95. https://doi.org/10.3390/mi6010080
APA StyleThoma, F., Goldschmidtböing, F., & Woias, P. (2015). A New Concept of a Drug Delivery System with Improved Precision and Patient Safety Features. Micromachines, 6(1), 80-95. https://doi.org/10.3390/mi6010080