
Helical Piezoelectric Energy Harvester and Its Application to Energy Harvesting Garments


Abstract
:1. Introduction
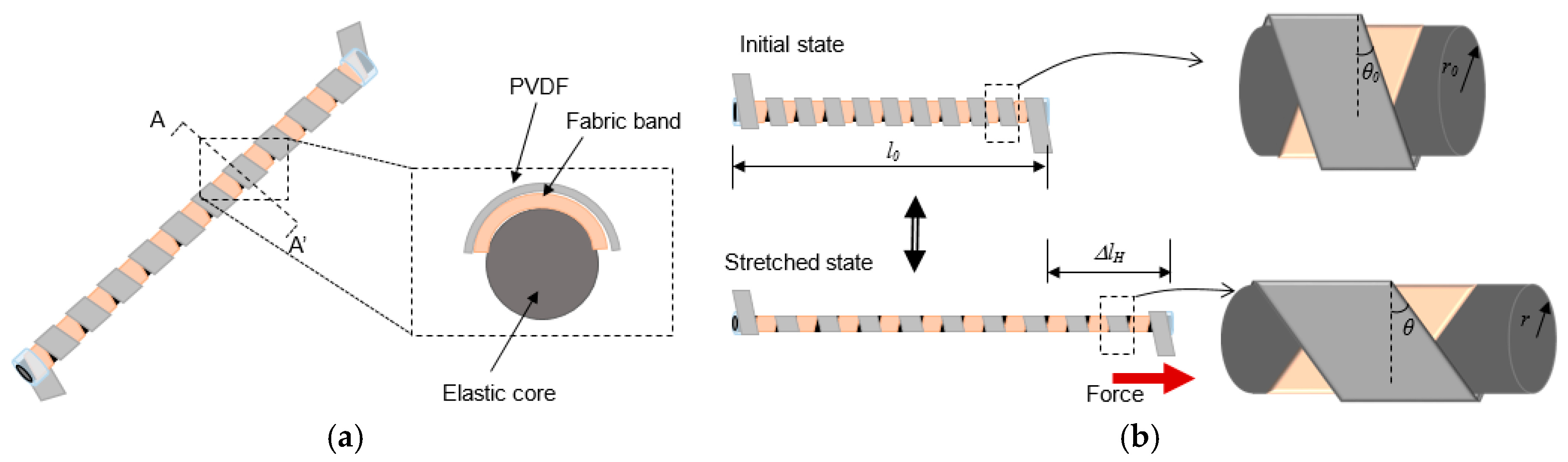
2. Principle
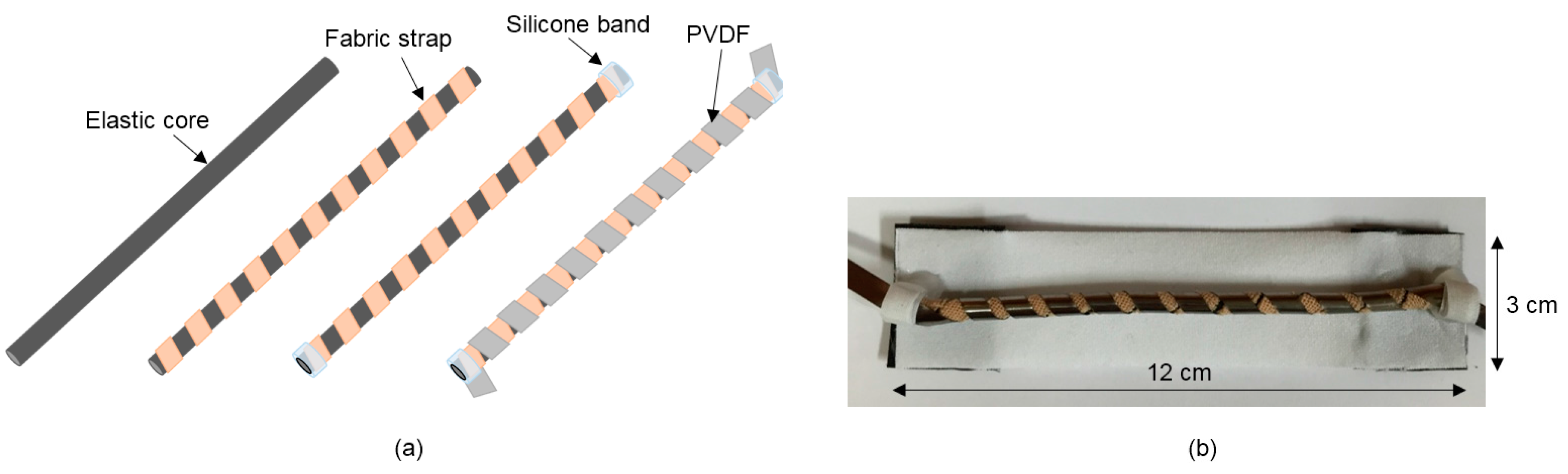
3. Fabrication
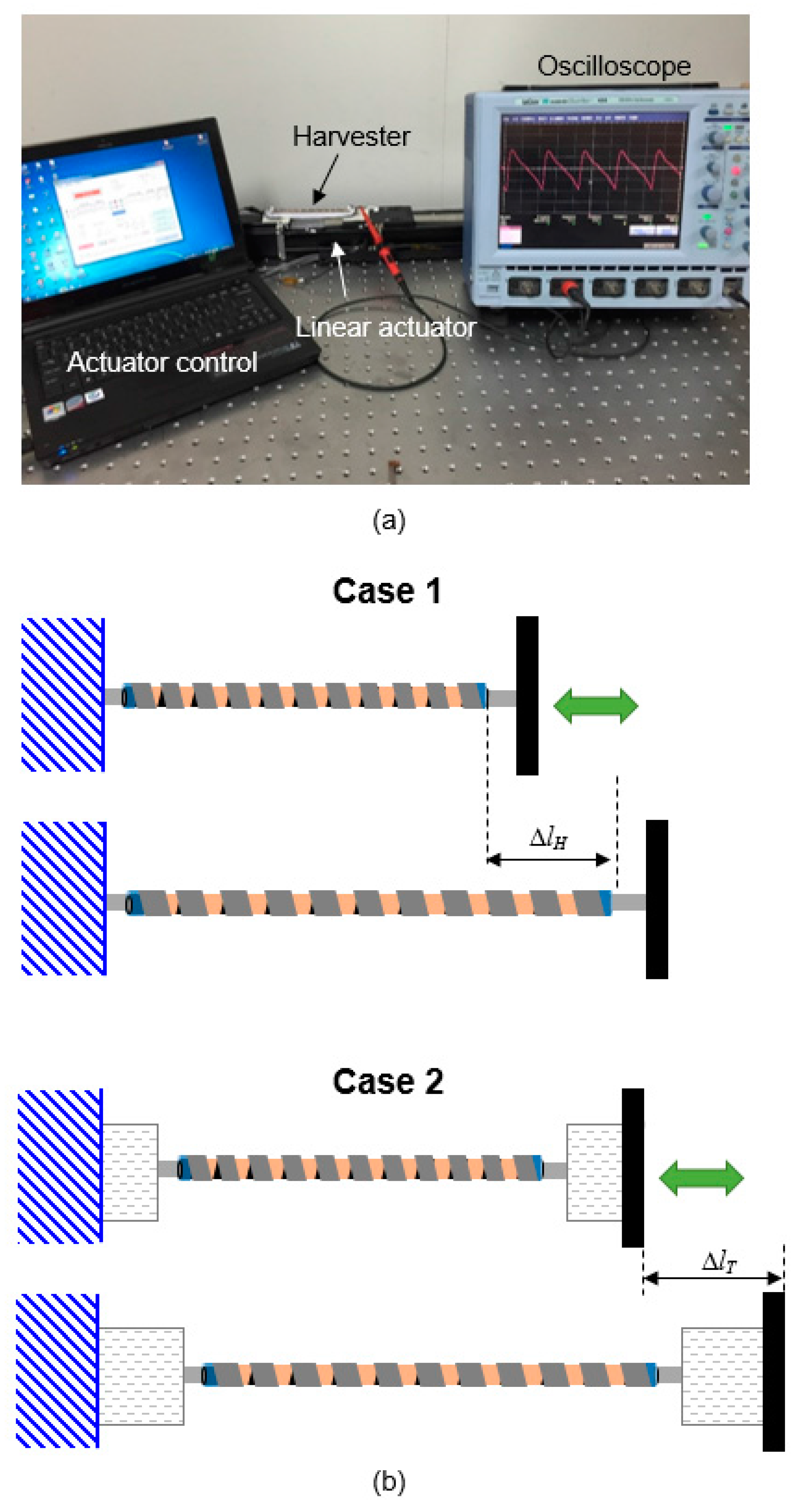
4. Results and Discussion
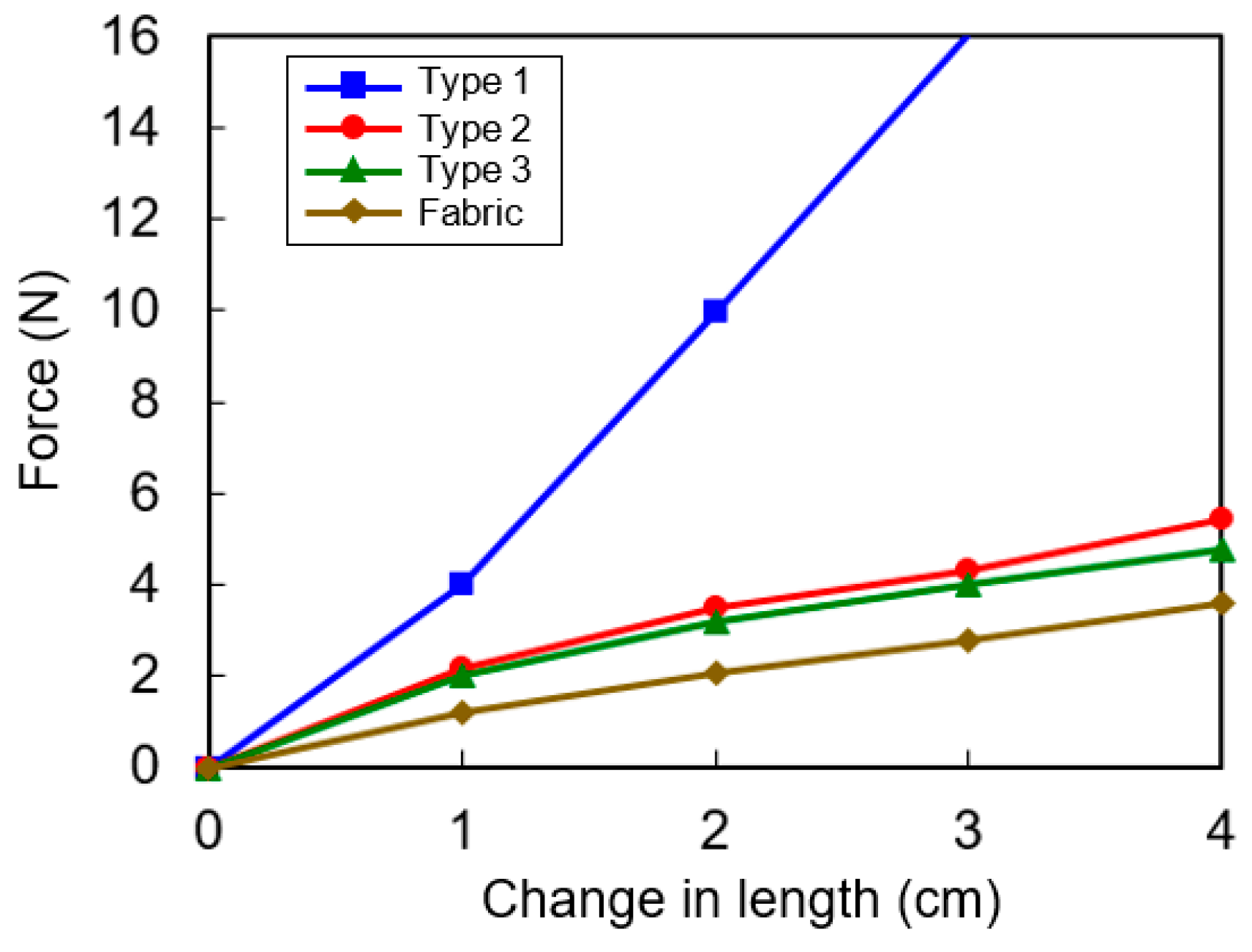
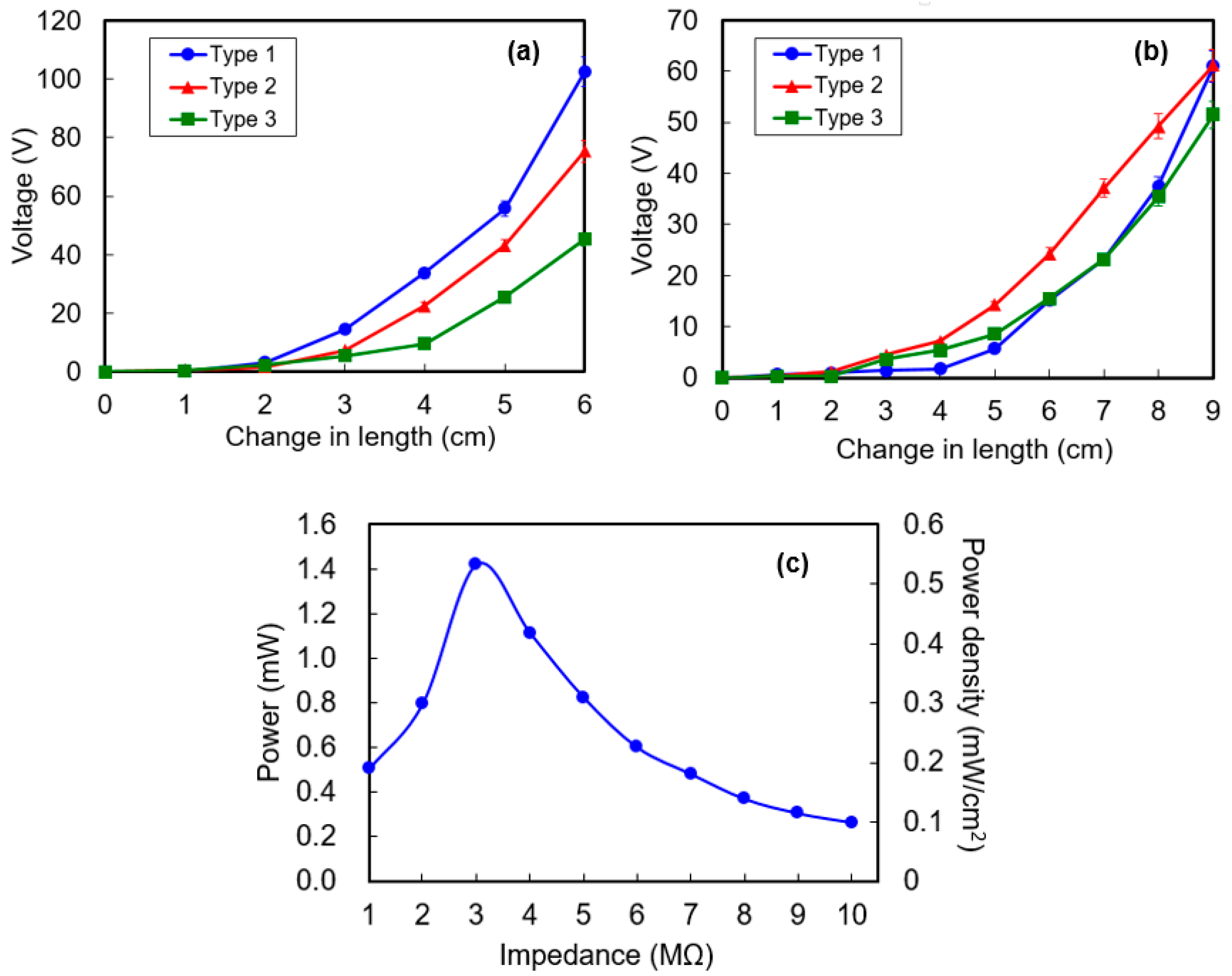
4.1. Single HPEH
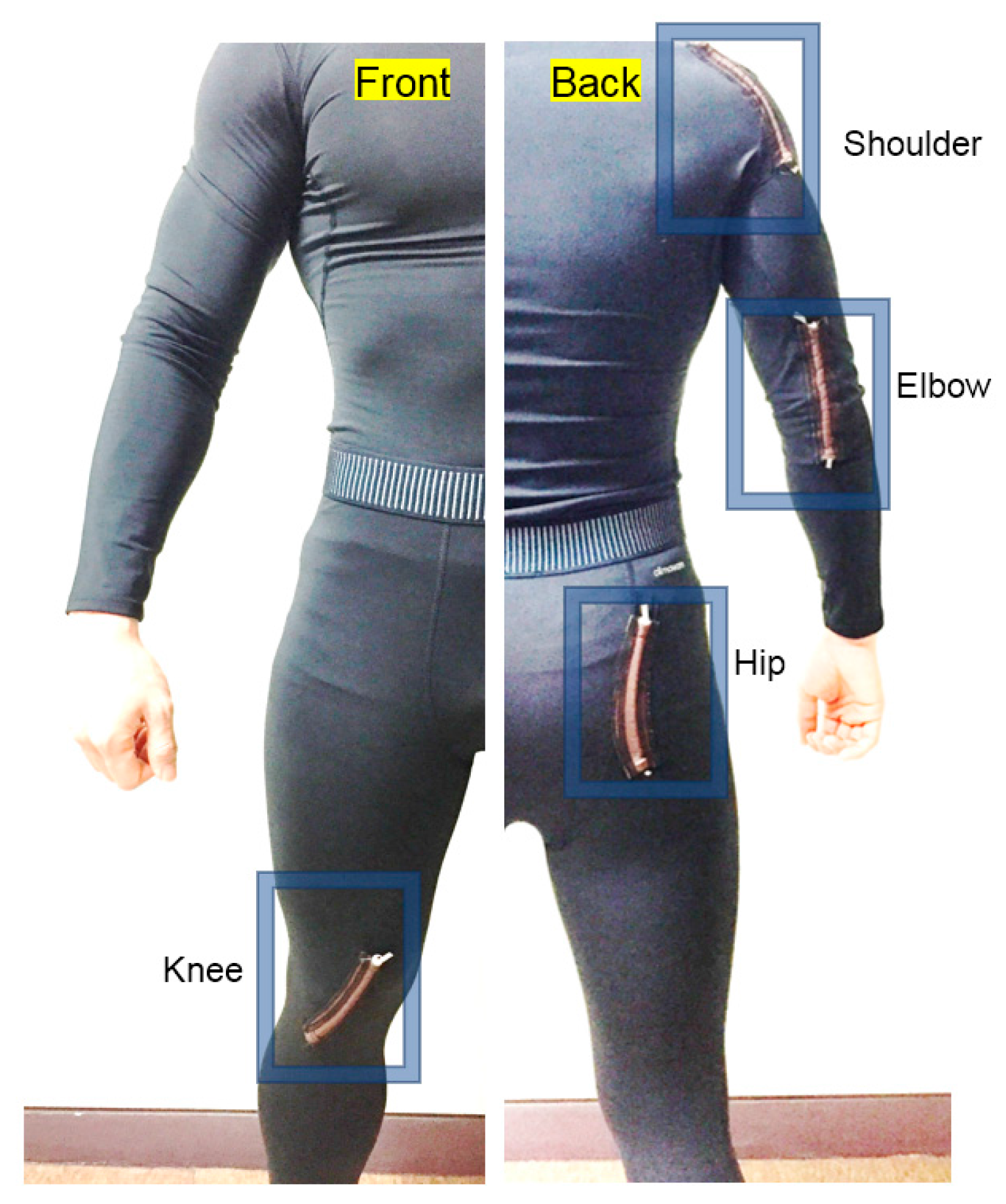
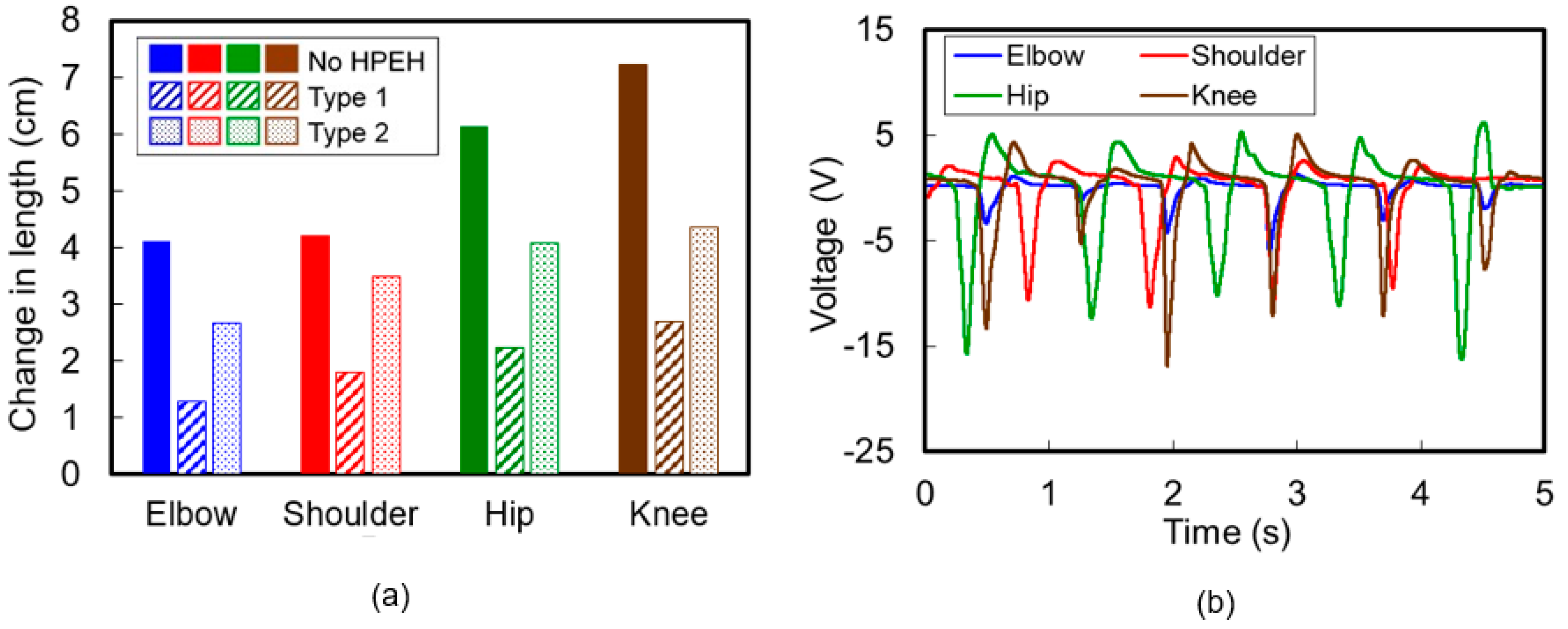
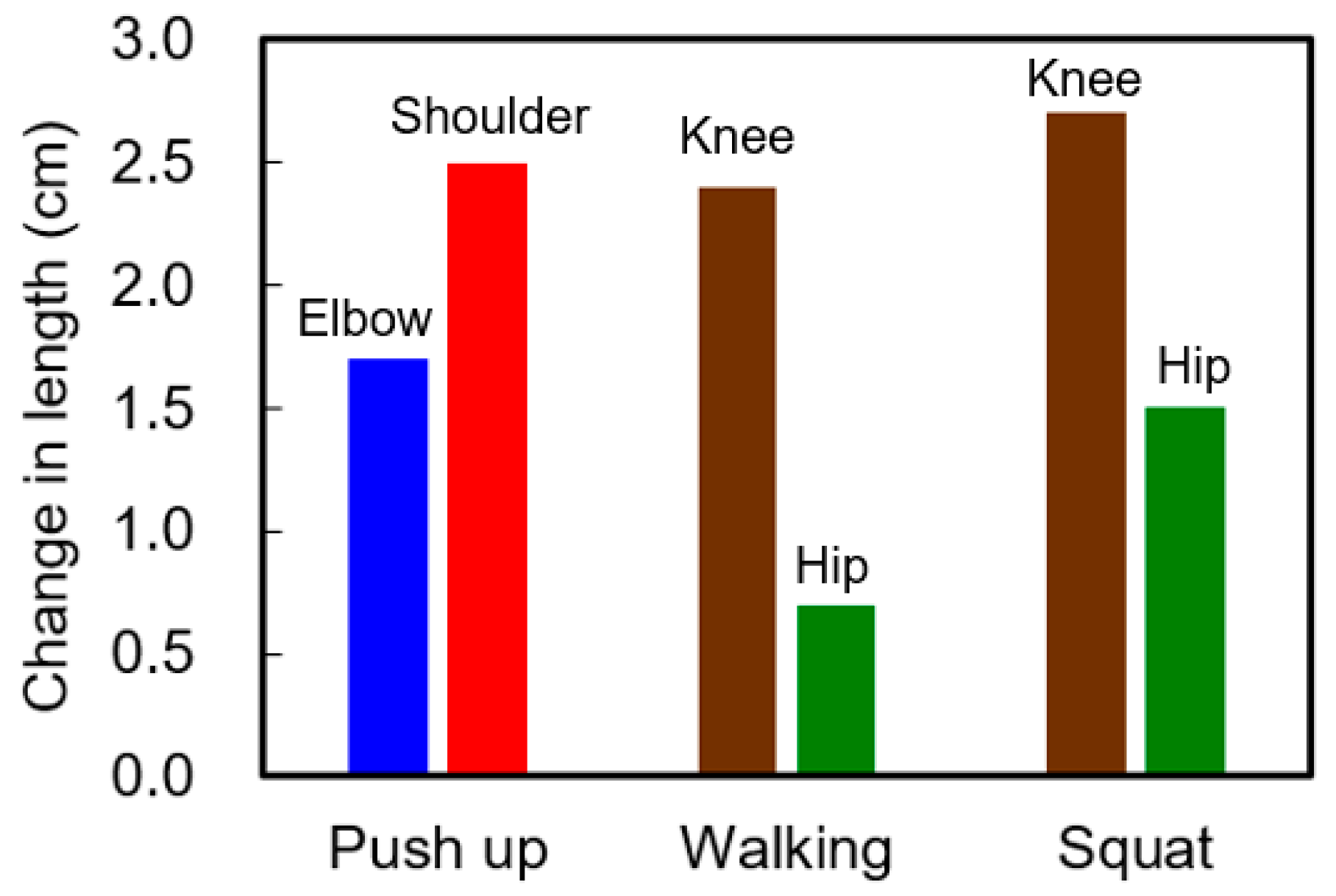
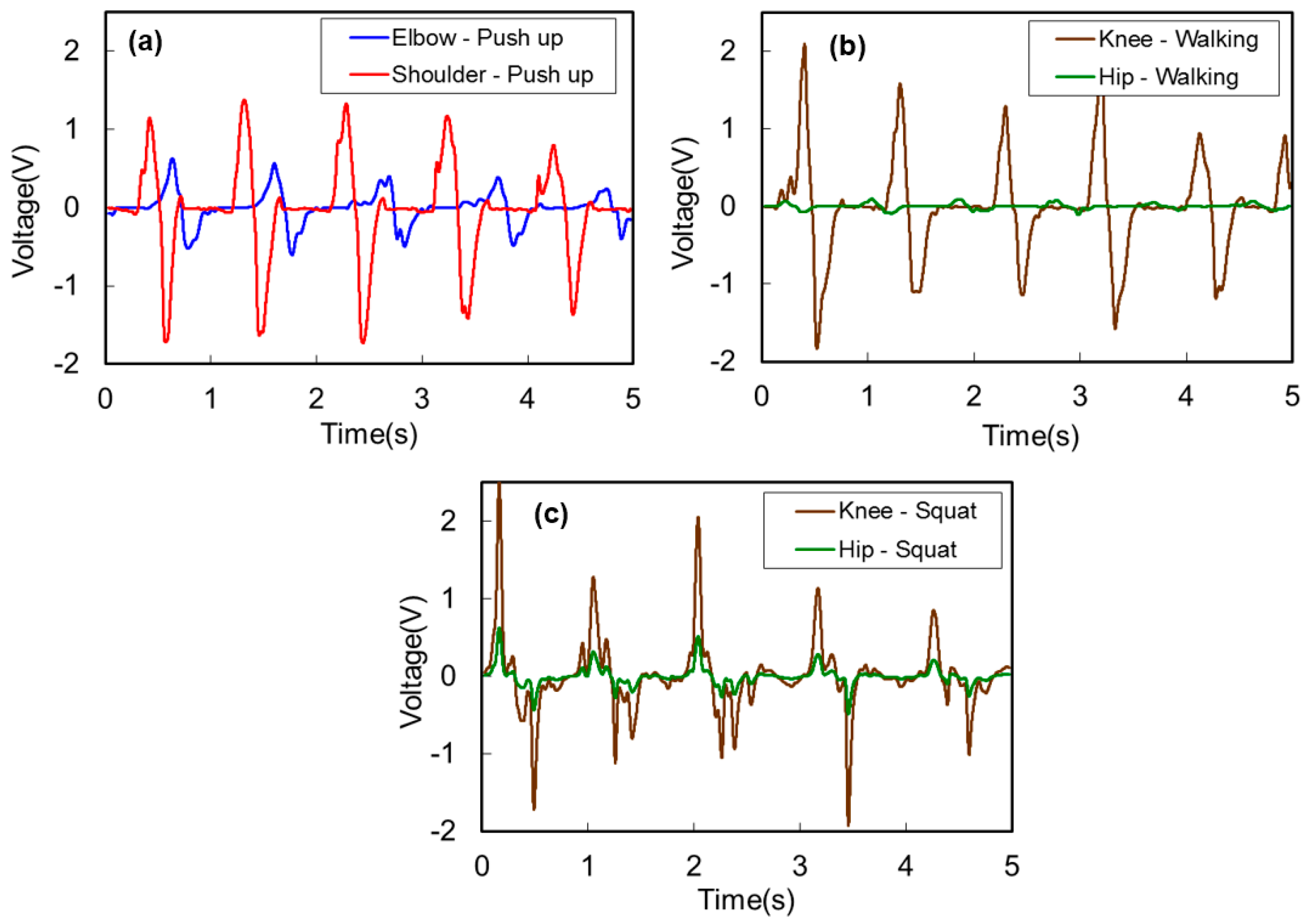
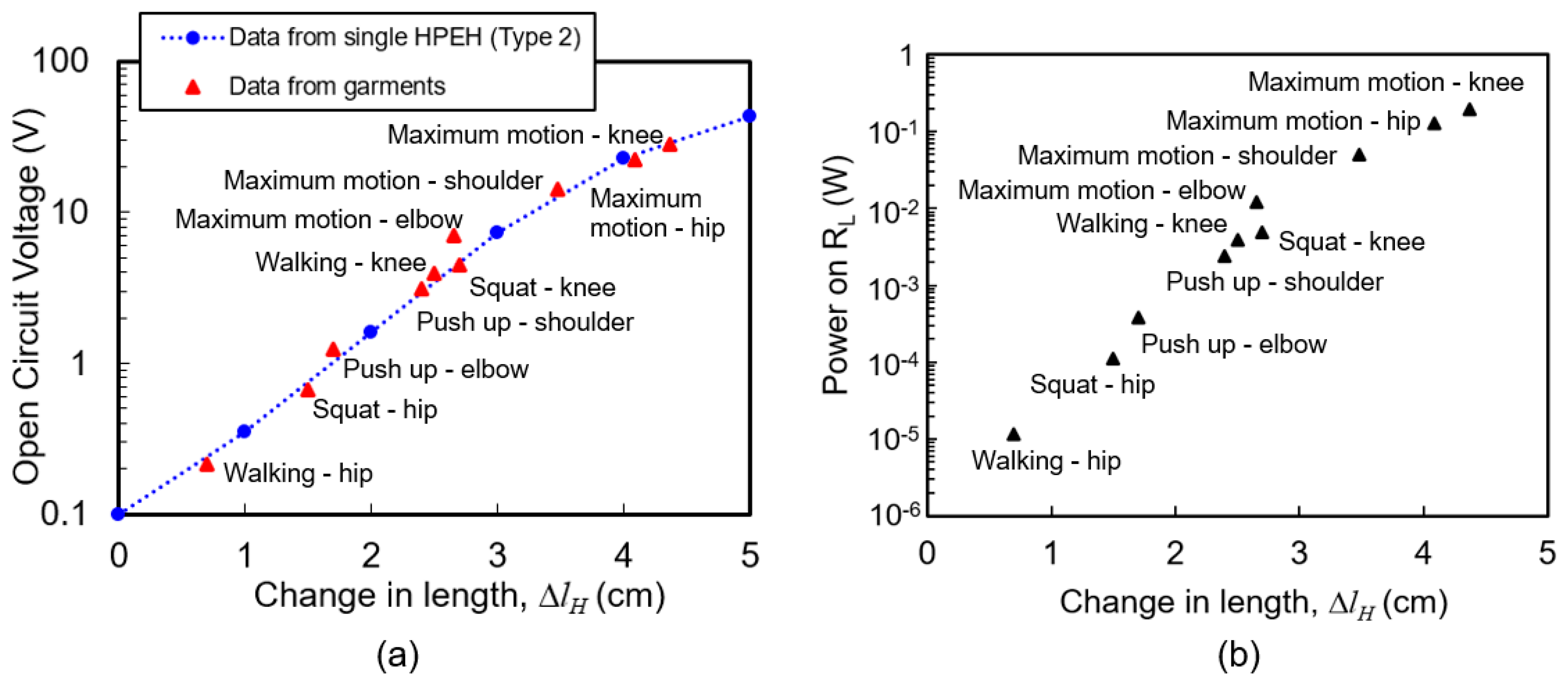
4.2. Energy Harvesting Garments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jordan, M.; DuClos, C.; Folsom, J.; Thomas, R. Developing a smartphone interface for the Florida environmental public health tracking web portal. J. Public Health Manag. Pract. 2015, 21, S50–S54. [Google Scholar] [CrossRef] [PubMed]
- Moran, S.; Nishida, T.; Nakata, K. Perceptions of a wearable ubiquitous monitoring device. IEEE Technol. Soc. Mag. 2013, 32, 56–64. [Google Scholar] [CrossRef]
- Windmiller, J.R.; Wang, J. Wearable electrochemical sensors and biosensors: A review. Electroanalysis 2012, 25, 29–46. [Google Scholar] [CrossRef]
- Patel, S.; Park, H.; Bonato, P.; Chan, L.; Rodgers, M. A review of wearable sensors and systems with application in rehabilitation. J. NeuroEng. Rehabil. 2012, 9, 21. [Google Scholar] [CrossRef] [PubMed]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing—From humans to humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Helmer, R.J.N.; Mestrovic, M.A.; Farrow, D.; Lucas, S.; Spratford, W. Smart textiles: Position and motion sensing for sport, entertainment and rehabilitation. Adv. Sci. Technol. 2008, 60, 144–153. [Google Scholar] [CrossRef]
- Jabbar, H.; Song, Y.; Jeong, T. RF energy harvesting system and circuits for charging of mobile devices. IEEE Trans. on Consum. Electron. 2010, 56, 247–253. [Google Scholar] [CrossRef]
- Ahn, Y.; Song, S.; Yun, K.-S. Woven flexible textile structure for wearable power-generating tactile sensor array. Smart Mater. Struct. 2015, 24, 075002. [Google Scholar] [CrossRef]
- Ha, M.; Park, J.; Lee, Y.; Ko, H. Triboelectric generators and sensors for self-powered wearable electronics. ACS Nano 2015, 9, 3421–3427. [Google Scholar] [CrossRef] [PubMed]
- Lechêne, B.P.; Cowell, M.; Pierre, A.; Evans, J.W.; Wright, P.K.; Arias, A.C. Organic solar cells and fully printed super-capacitors optimized for indoor light energy harvesting. Nano Energy 2016, 26, 631–640. [Google Scholar] [CrossRef]
- Kim, B.J.; Kim, D.H.; Lee, Y.-Y.; Shin, H.-W.; Han, G.S.; Hong, J.S.; Mahmood, K.; Ahn, T.K.; Joo, Y.-C.; Hong, K.S.; et al. Highly efficient and bending durable perovskite solar cells: Toward a wearable power source. Energy Environ. Sci. 2015, 8, 916–921. [Google Scholar] [CrossRef]
- Le, T.; Mayaram, K.; Fiez, T. Efficient far-field radio frequency energy harvesting for passively powered sensor networks. IEEE J. Solid-State Circuits 2008, 43, 1287–1302. [Google Scholar] [CrossRef]
- Visser, H.J.; Vullers, R.J.M. RF energy harvesting and transport for wireless sensor network applications: Principles and requirements. IEEE Proc. 2013, 101, 1410–1423. [Google Scholar] [CrossRef]
- Leonov, V. Thermoelectric energy harvesting of human body heat for wearable sensors. IEEE Sens. J. 2013, 13, 2284–2291. [Google Scholar] [CrossRef]
- Kim, S.J.; We, J.H.; Cho, B.J. A wearable thermoelectric generator fabricated on a glass fabric. Energy Environ. Sci. 2014, 7, 1959–1965. [Google Scholar] [CrossRef]
- Lu, Z.; Zhang, H.; Mao, C.; Li, C. M. Silk fabric-based wearable thermoelectric generator for energy harvesting from the human body. Appl. Energy 2016, 164, 57–63. [Google Scholar] [CrossRef]
- Fan, X.; Chen, J.; Yang, J.; Bai, P.; Li, Z.; Wang, Z.L. Ultrathin, Rollable, paper-based triboelectric nanogenerator for acoustic energy harvesting and self-powered sound recording. ACS Nano 2015, 9, 4236–4243. [Google Scholar] [CrossRef] [PubMed]
- Jang, M.; Song, S.; Park, Y.-H.; Yun, K.-S. Piezoelectric energy harvester operated by noncontact mechanical frequency up-conversion using shell cantilever structure. Jpn J. Appl. Phys. 2015, 54, 06FP08. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, X.; Yang, Y.; Wang, Z.L. Hybridized electromagnetic–triboelectric nanogenerator for scavenging biomechanical energy for sustainably powering wearable electronics. ACS Nano 2015, 9, 3521–3529. [Google Scholar] [CrossRef] [PubMed]
- Seung, W.; Gupta, M.K.; Lee, K.Y.; Shin, K.-S.; Lee, J.-H.; Kim, T.Y.; Kim, S.; Lin, J.; Kim, J.H.; Kim, S.-W. Nanopatterned textile-based wearable triboelectric nanogenerator. ACS Nano 2015, 9, 3501–3509. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Zhu, G.; Yang, W.; Jing, Q.; Bai, P.; Yang, Y.; Hou, T.-C.; Wang, L.Z. Harmonic-resonator-based triboelectric nanogenerator as a sustainable power source and a self-powered active vibration sensor. Adv. Mater. 2013, 25, 6094–6099. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Yu, S.; Kang, B.-G.; Yun, K.-S. Electrostatic energy harvester using magnetically actuated liquid dielectric layers. J. Microelectromechan. Syst. 2015, 24, 516–518. [Google Scholar] [CrossRef]
- Shenck, N.S.; Paradiso, J.A. Energy scavenging with shoe-mounted piezoelectrics. IEEE Micro 2001, 21, 30–42. [Google Scholar] [CrossRef]
- Granstrom, J.; Feenstra, J.; Sodano, H.A.; Farinholt, K. Energy harvesting from a backpack instrumented with piezoelectric shoulder straps. Smart Mater. Struct. 2007, 16, 1810. [Google Scholar] [CrossRef]
- Yang, B.; Yun, K.-S. Piezoelectric shell structures as wearable energy harvesters for effective power generation at low-frequency movement. Sens. Actuators A Phys. 2012, 188, 427–433. [Google Scholar] [CrossRef]
- Pozzi, M.; Zhu, M. Plucked piezoelectric bimorphs for knee-joint energy harvesting: Modelling and experimental validation. Smart Mater. Struct. 2011, 20, 055007. [Google Scholar] [CrossRef]
- Yun, D.; Park, J.; Yun, K.-S. Highly stretchable energy harvester using piezoelectric helical structure for wearable applications. Electron. Lett. 2015, 51, 284–285. [Google Scholar] [CrossRef]
- Pachi, A.; Ji, T. Frequency and velocity of people walking. Struct. Engin. 2005, 83, 36–40. [Google Scholar]
- Song, S.; Yun, K.-S. Design and characterization of scalable woven piezoelectric energy harvester for wearable applications. Smart Mater. Struct. 2015, 24, 045008. [Google Scholar] [CrossRef]
- Sim, H.J.; Choi, C.; Lee, C.J.; Kim, Y.T.; Spinks, G.M.; Lima, M.D.; Baughman, R.H.; Kim, S.J. Flexible, stretchable and weavable piezoelectric fiber. Adv. Eng. Mater. 2015, 17, 1270–1275. [Google Scholar] [CrossRef]
- Soin, N.; Shah, T.H.; Anand, S.C.; Geng, J.; Pornwannachai, W.; Mandal, P.; Reid, D.; Sharma, S.; Hadimani, R.L.; et al. Novel ‘3-D spacer’ all fibre piezoelectric textiles for energy harvesting applications. Energy Environ. Sci. 2014, 7, 1670–1679. [Google Scholar] [CrossRef]
- Yang, J.-H.; Cho, H.-S.; Park, S.-H.; Song, S.-H.; Yun, K.-S.; Lee, J.H. Effect of garment design on piezoelectricity harvesting from joint movement. Smart Mater. Struct. 2016, 25, 035012. [Google Scholar] [CrossRef]
- Cha, S.; Kim, S.M.; Kim, H.; Ku, J.; Sohn, J.I.; Park, Y.J.; Song, B.G.; Jung, M.H.; Lee, E.K.; Choi, B.L.; et al. Porous PVDF as effective sonic wave driven nanogenerators. Nano Lett. 2011, 11, 5142–5147. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Type 1 | Type 2 | Type 3 |
|---|---|---|---|
| Elastic Core Diameter | 5 mm | 3 mm | 3 mm |
| PVDF Width, w | 5 mm | 5 mm | 3 mm |
| Number of Turns, n | 11 | 11 | 11 |
| Initial Winding Angle, θ0 | ~ 30° | ~ 40° | ~ 30° |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.; Yun, K.-S. Helical Piezoelectric Energy Harvester and Its Application to Energy Harvesting Garments. Micromachines 2017, 8, 115. https://doi.org/10.3390/mi8040115
Kim M, Yun K-S. Helical Piezoelectric Energy Harvester and Its Application to Energy Harvesting Garments. Micromachines. 2017; 8(4):115. https://doi.org/10.3390/mi8040115
Chicago/Turabian StyleKim, Minsung, and Kwang-Seok Yun. 2017. "Helical Piezoelectric Energy Harvester and Its Application to Energy Harvesting Garments" Micromachines 8, no. 4: 115. https://doi.org/10.3390/mi8040115
APA StyleKim, M., & Yun, K. -S. (2017). Helical Piezoelectric Energy Harvester and Its Application to Energy Harvesting Garments. Micromachines, 8(4), 115. https://doi.org/10.3390/mi8040115