Map-Based Indoor Pedestrian Navigation Using an Auxiliary Particle Filter


Abstract
:1. Introduction
- Firstly, only smartphone built-in IMU and indoor map information are used in the proposed algorithm, and no pre-surveying or structure installation are needed for this system, which can dramatically reduce the time and economic cost of indoor navigation systems;
- Secondly, the KF and PF are combined to effectively utilize MEMS sensor data. A cascade structure algorithm is proposed to decrease the number of the particles in the PF, which can indirectly decrease the system computational burden;
- Lastly, the map-matching and map-aiding methods are innovatively combined, and the combination method can make full use of indoor map information which, to a certain extent, will improve the navigation calculating precision;
- At the end of the work, experimental results in different scenarios are used to show the benefits of the proposed algorithm.
2. Algorithm
2.1. Cascade Structure Algorithm
2.2. Lower Kalman Filter
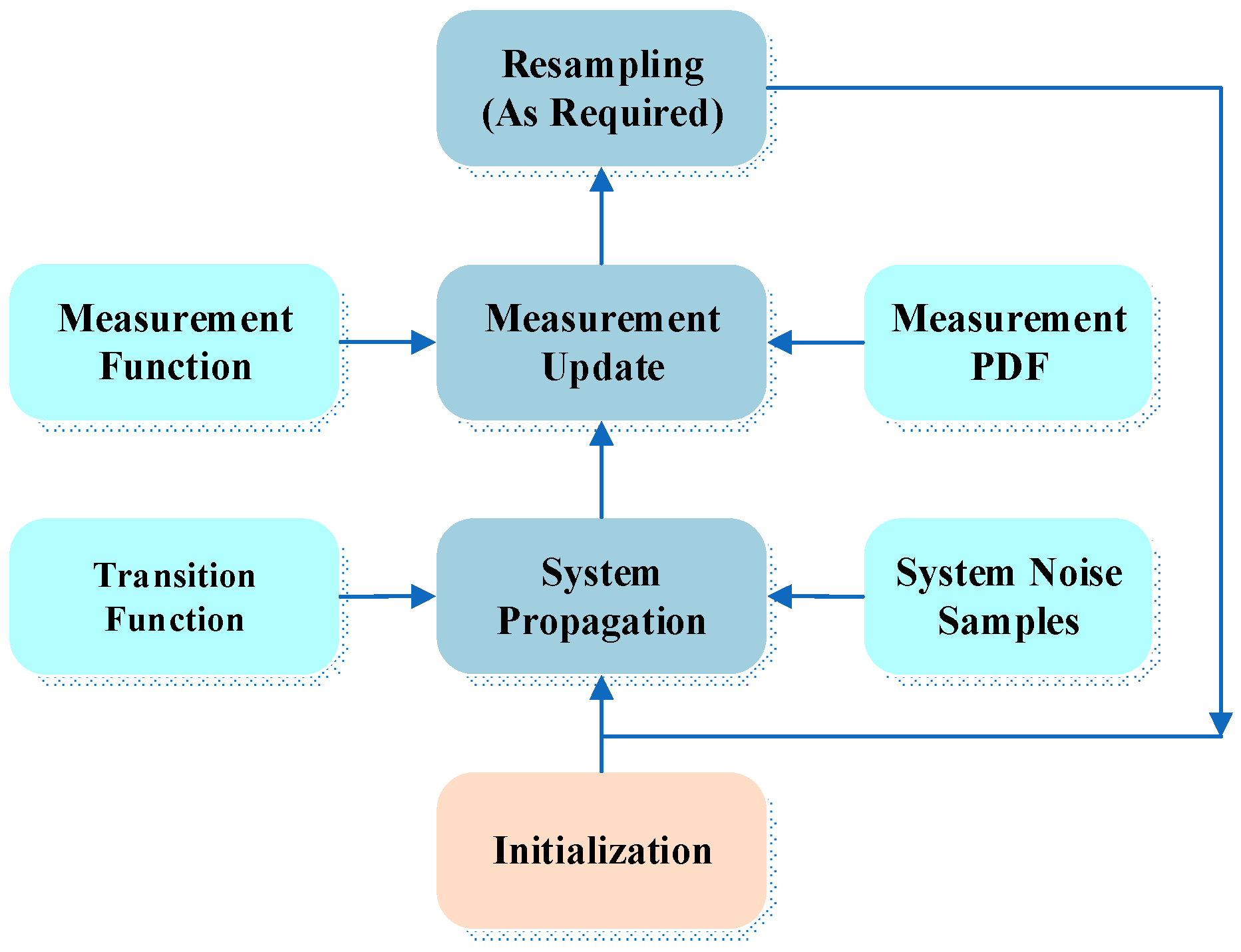
2.3. Upper Particle Filter
2.4. Map-Matching and Map-Aiding Methods
2.4.1. Map-Aiding Implementation
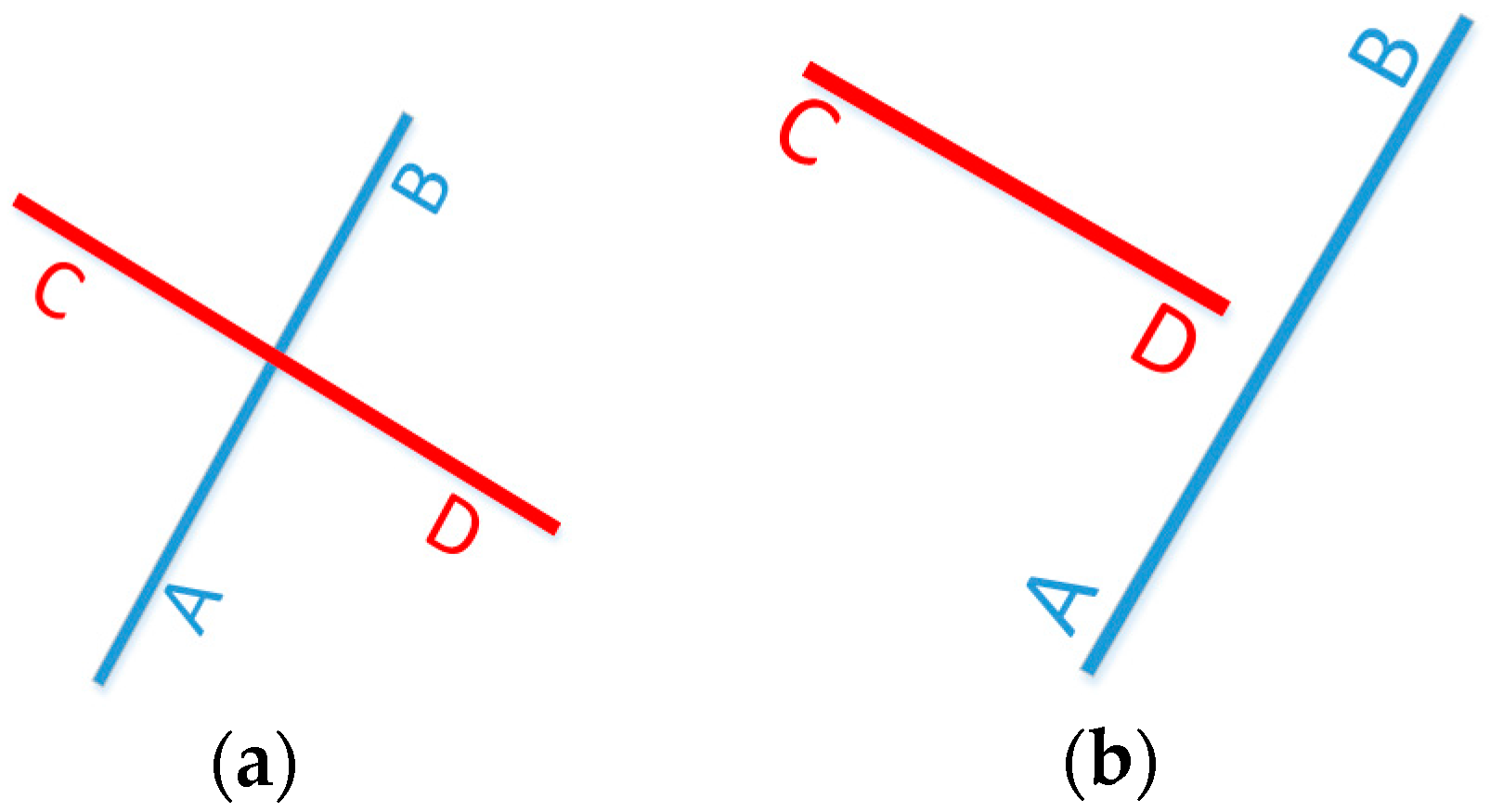
- Point A and B should be on different sides of the line segment vector CD; Point C and D should be on different sides of the line segment vector AB. To judge whether one point is in the right or left side of a line segment, the following equations are used:
- For vector , is defined as .
- If , point is on the line segment ;
- If , point is on the right side of the line segment;
- Otherwise, point is on the left side of the line segment.
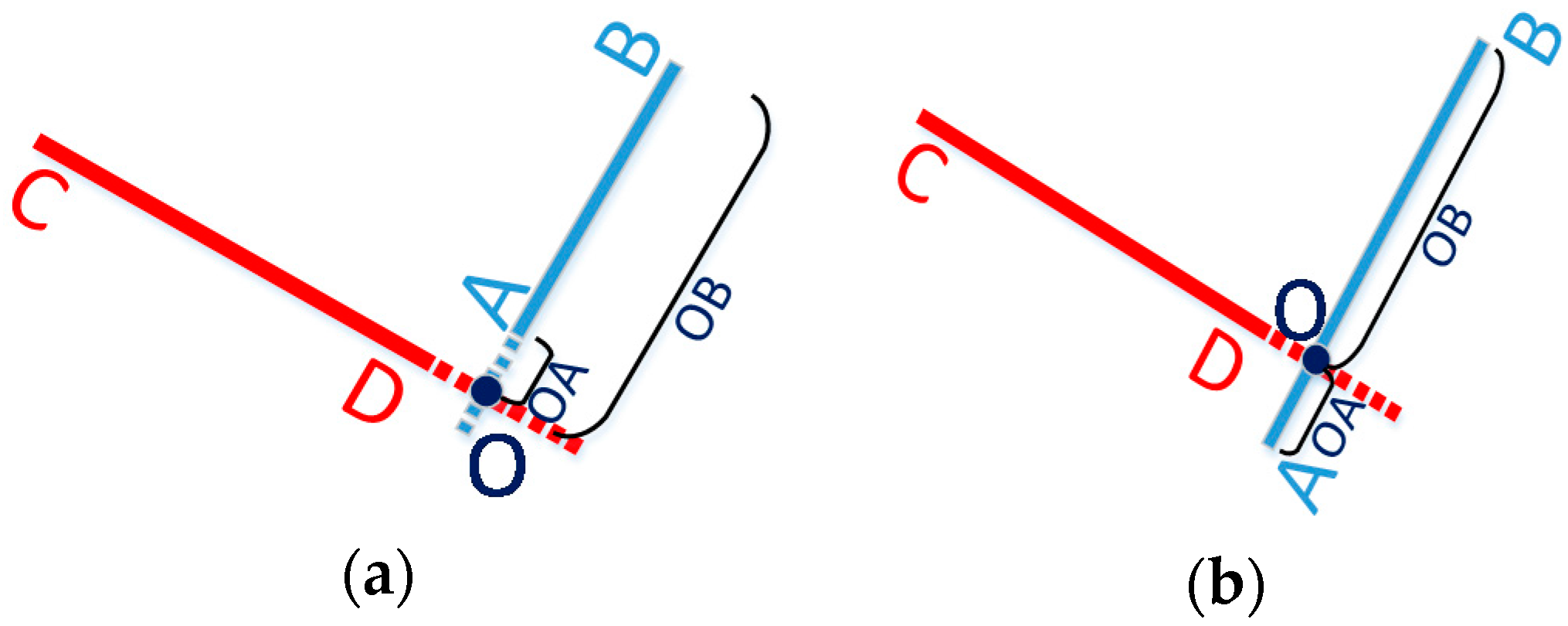
- Line AB and line CD should have one point of intersection. As shown in Figure 4a,b, O is the intersection of vector AB and CD, and OA, OB, and AB separately represent the length of the corresponding line segment vector. If AB > max{OA,OB} and CD > max{OC,OD}, O denotes an intersection point of line segments AB and CD.
2.4.2. Map-Matching Implementation
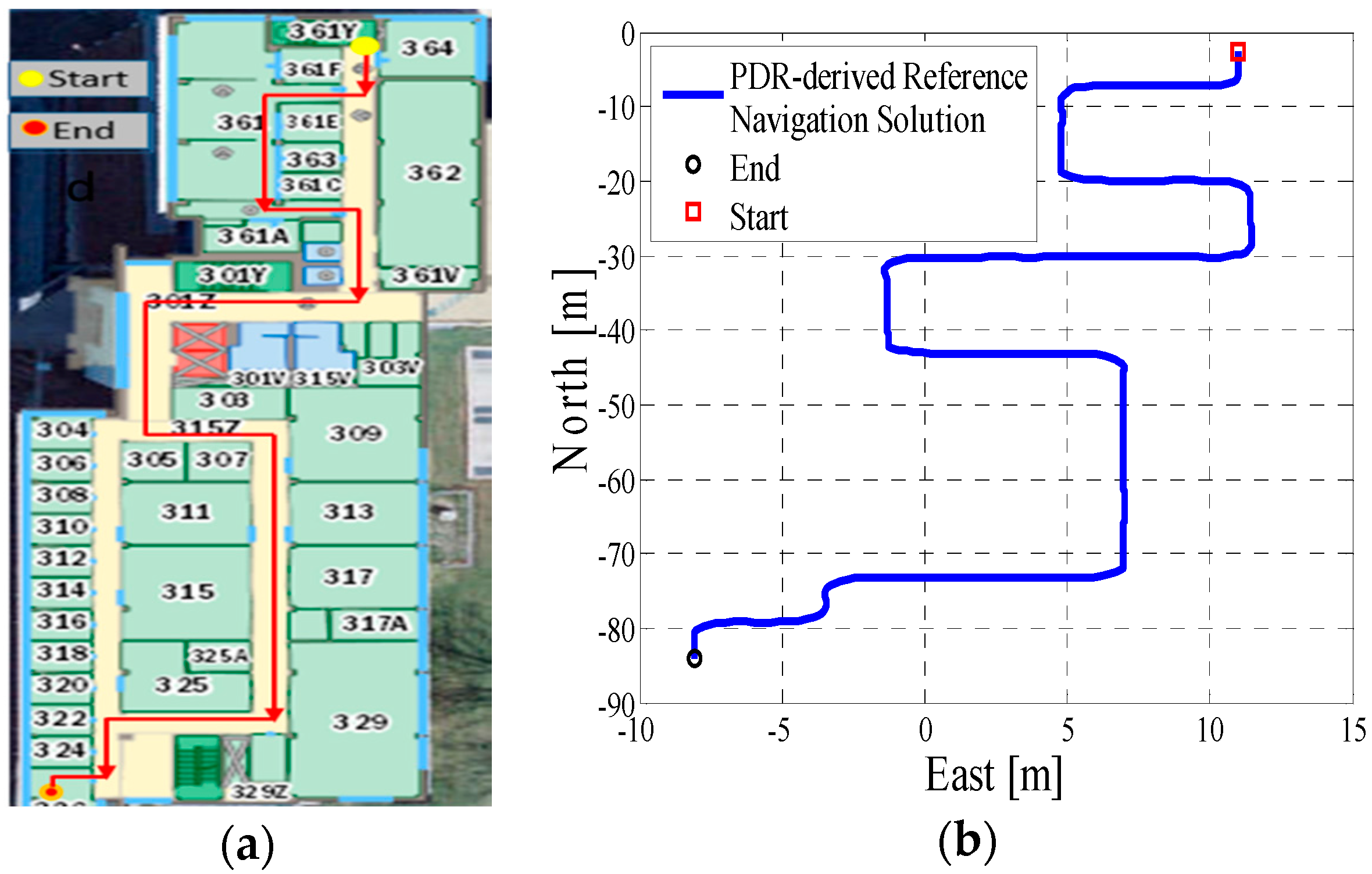
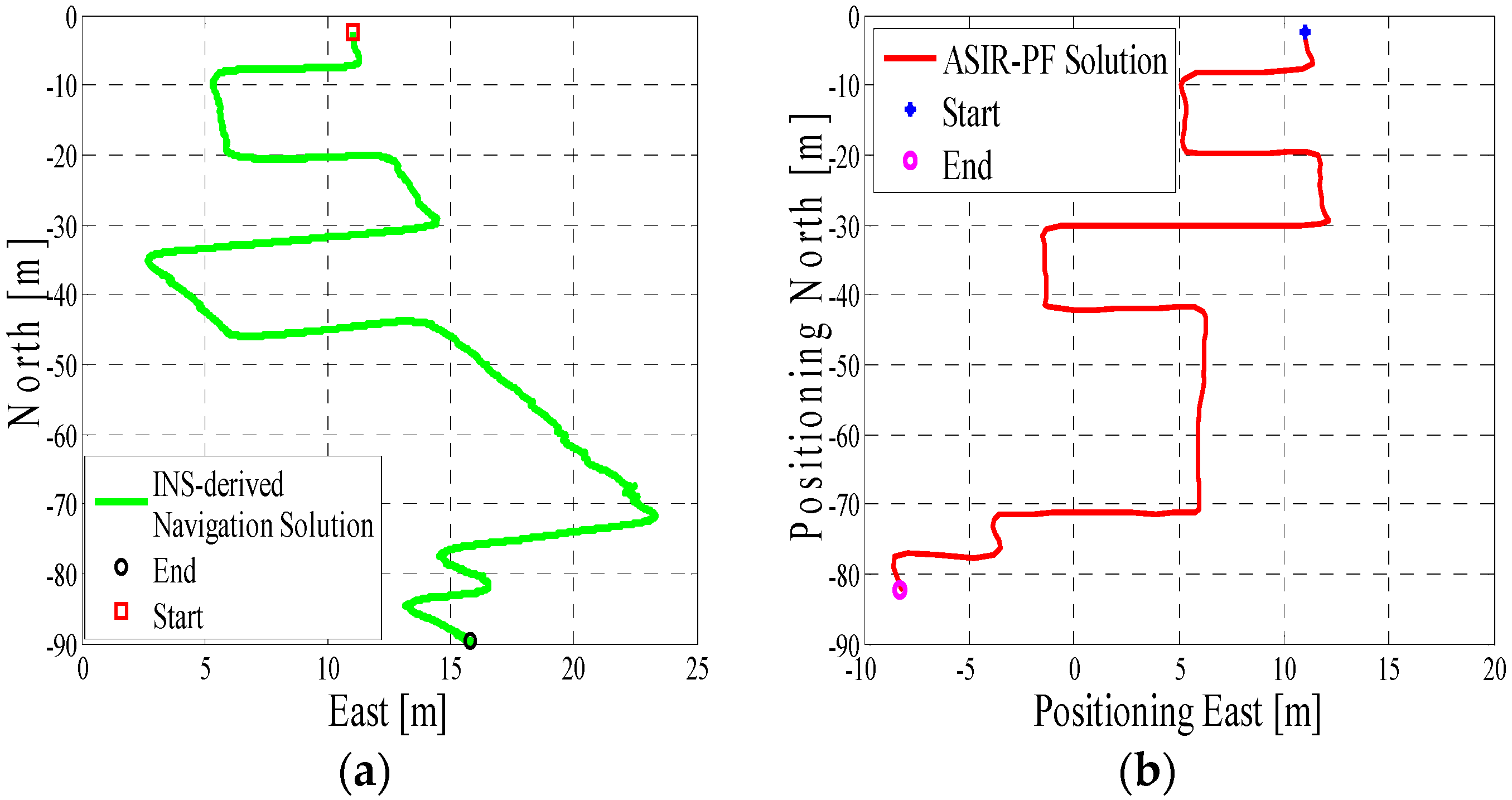
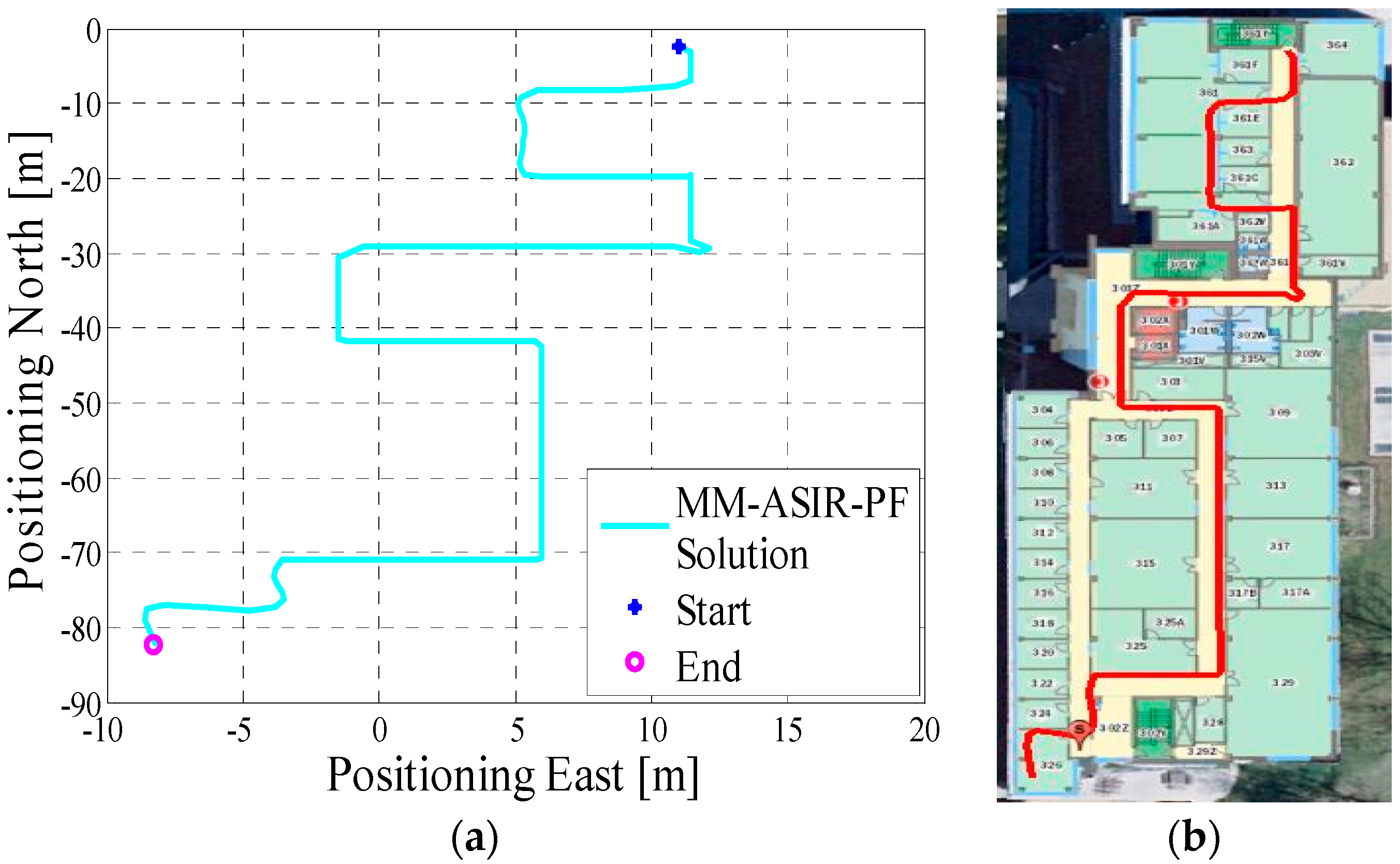
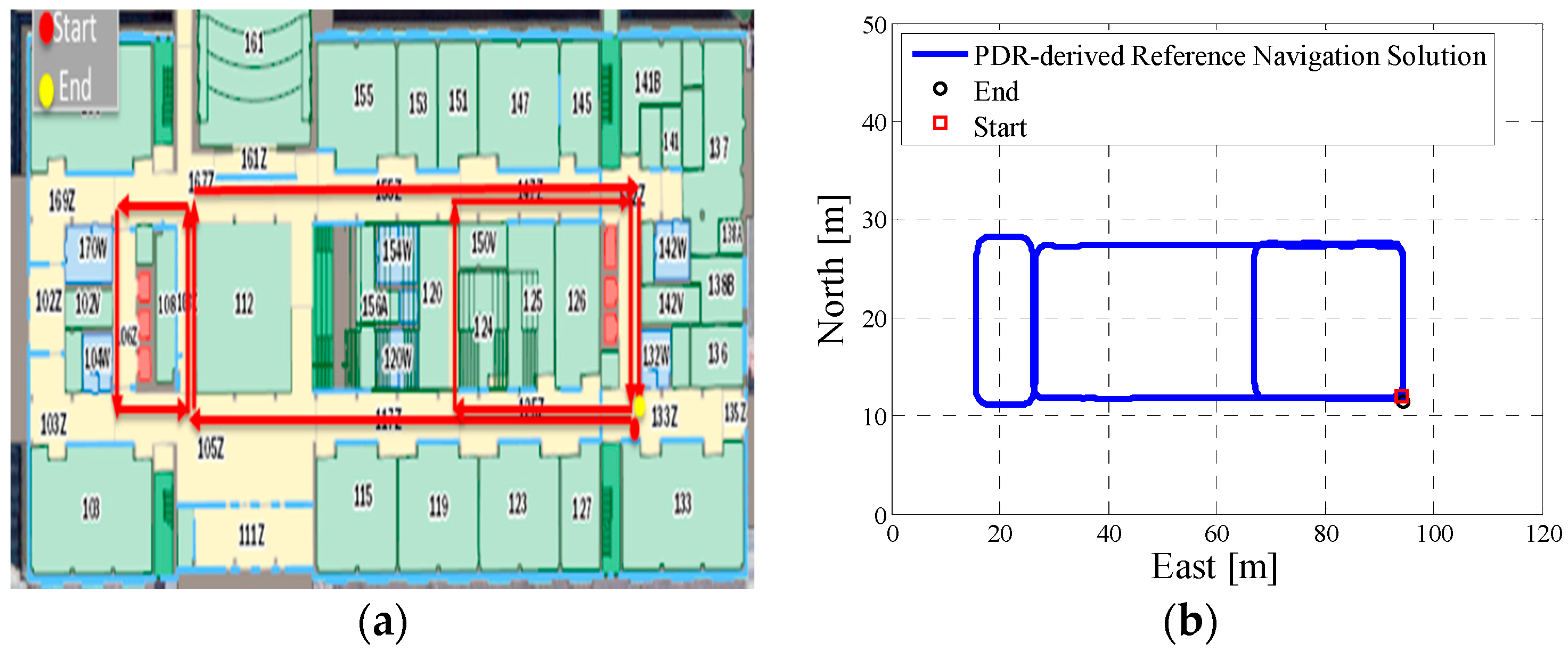
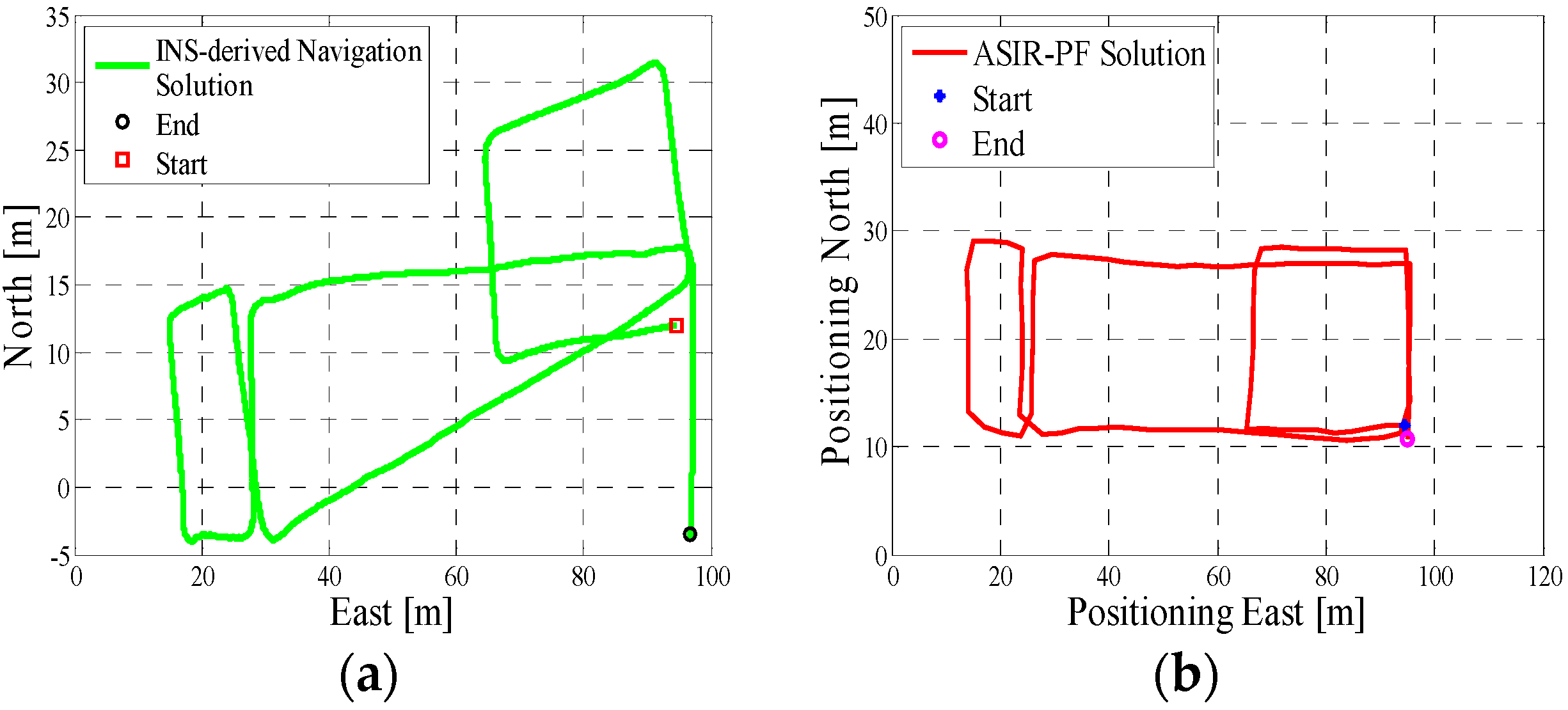
3. Experiment and Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Woodman, O.; Harle, R. Pedestrian localisation for indoor environments. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; ACM: New York, NY, USA; pp. 114–123. [Google Scholar]
- Lan, H.; Yu, C.; Zhuang, Y.; Li, Y.; El-Sheimy, N. A novel kalman filter with state constraint approach for the integration of multiple pedestrian navigation systems. Micromachines 2015, 6, 926–952. [Google Scholar] [CrossRef]
- Rintamäki, T.; Mitronen, L. Creating information-based customer value with service systems in retailing. In Service Systems Science; Springer: Tokyo, Japan, 2015; pp. 145–162. [Google Scholar]
- Khan, M.I. Design and Development of Indoor Positioning System: For Portable Devices; LAP LAMBERT Academic Publishing: Saarbrücken, Germany, 2013. [Google Scholar]
- Lan, K.-C.; Shih, W.-Y. Using smart-phones and floor plans for indoor location tracking. IEEE Trans. Hum. Mach. Syst. 2014, 44, 211–221. [Google Scholar]
- Emilsson, A. Indoor Navigation Using an iPhone. Available online: http://www.diva-portal.org/smash/get/diva2:328320/FULLTEXT01.pdf (accessed on 19 July 2017).
- Lan, H.; Yu, C.; El-Sheimy, N. An integrated PDR/GNSS pedestrian navigation system. In China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume III; Springer: Berlin/Heidelberg, Germany, 2015; pp. 677–690. [Google Scholar]
- Rehman, U.; Cao, S. Augmented reality-based indoor navigation using google glass as a wearable head-mounted display. In Proceedings of the 2015 IEEE International Conference on Systems Man and Cybernetics (SMC), Kowloon, China, 9–12 October 2015; pp. 1452–1457. [Google Scholar]
- Fallah, N.; Apostolopoulos, I.; Bekris, K.; Folmer, E. Indoor human navigation systems: A survey. Interact. Comput. 2013. [Google Scholar] [CrossRef]
- Woodman, O.; Harle, R. Rf-based initialisation for inertial pedestrian tracking. In Proceedings of the 7th International Conference on Pervasive Computing, Nara, Japan, 11–14 May 2009; pp. 238–255. [Google Scholar]
- Chai, W.; Chen, C.; Edwan, E.; Zhang, J.; Loffeld, O. INS/Wi-Fi based indoor navigation using adaptive kalman filtering and vehicle constraints. In Proceedings of the 2012 9th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 15–16 March 2012; pp. 36–41. [Google Scholar]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi integration based on handheld devices for indoor pedestrian navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology; IET: Stevenage, UK, 2004; Volume 17. [Google Scholar]
- Karimi, H.A. Indoor Wayfinding and Navigation; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Del Rosario, M.B.; Redmond, S.J.; Lovell, N.H. Tracking the evolution of smartphone sensing for monitoring human movement. Sensors 2015, 15, 18901–18933. [Google Scholar] [CrossRef] [PubMed]
- Alojz, K.; Kajánek, P.; Lipták, I. Systematic error elimination using additive measurements and combination of two low cost IMSs. IEEE Sens. J. 2016, 16, 6239–6248. [Google Scholar]
- Du, H.; Bogue, R. Mems sensors: Past, present and future. Sens. Rev. 2007, 27, 7–13. [Google Scholar]
- Lan, H.; El-Sheimy, N. A state constraint kalman filter for pedestrian navigation with low cost mems inertial sensors. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; p. 579589. [Google Scholar]
- Syed, Z.F.; Aggarwal, P.; Niu, X.; El-Sheimy, N. Civilian vehicle navigation: Required alignment of the inertial sensors for acceptable navigation accuracies. IEEE Trans. Veh. Technol. 2008, 57, 3402–3412. [Google Scholar] [CrossRef]
- Enrico, P.; Leccese, F. Improvement of altitude precision in indoor and urban canyon navigation for small flying vehicles. In Proceedings of the 2015 IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015. [Google Scholar]
- Otto, C.; Milenkovic, A.; Sanders, C.; Jovanov, E. System architecture of a wireless body area sensor network for ubiquitous health monitoring. J. Mob. Multimed. 2006, 1, 307–326. [Google Scholar]
- Stojanović, D.; Stojanović, N. Indoor localization and tracking: Methods, technologies and research challenges. Facta Univ. Ser. Autom. Control Robot. 2014, 13, 57–72. [Google Scholar]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. WiFi-aided magnetic matching for indoor navigation with consumer portable devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef]
- Google, Indoor Maps Availability. Available online: https://support.google.com/gmm/answer/1685827?hl=en (accessed on 9 March,2017).
- Von Gioi, R.G.; Jakubowicz, J.; Morel, J.-M.; Randall, G. LSD: A line segment detector. Image Process. Line 2012, 2, 35–55. [Google Scholar] [CrossRef]
- Link, J.A.B.; Smith, P.; Viol, N.; Wehrle, K. Footpath: Accurate map-based indoor navigation using smartphones. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–8. [Google Scholar]
- Pinto, A.M.; Moreira, A.P.; Costa, P.G. A localization method based on map-matching and particle swarm optimization. J. Intell. Robot. Syst. 2015, 77, 313–326. [Google Scholar] [CrossRef]
- Yang, D.; Cai, B.; Yuan, Y. An improved map-matching algorithm used in vehicle navigation system. In Proceedings of the 2003 IEEE Intelligent Transportation Systems, Shanghai, China, 12–15 October 2003; pp. 1246–1250. [Google Scholar]
- Vaughn, D. Vehicle Speed Control Based on GPS/MAP Matching of Posted Speeds. U.S. Patent 5,485,161, 16 January 1996. [Google Scholar]
- White, C.E.; Bernstein, D.; Kornhauser, A.L. Some map matching algorithms for personal navigation assistants. Transp. Res. Part C Emerg. Technol. 2000, 8, 91–108. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. Part C Emerg. Technol. 2007, 15, 312–328. [Google Scholar] [CrossRef] [Green Version]
- Bierlaire, M.; Chen, J.; Newman, J. A probabilistic map matching method for smartphone GPS data. Transp. Res. Part C Emerg. Technol. 2013, 26, 78–98. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Zhao, L.; Noland, R.B. A general map matching algorithm for transport telematics applications. GPS Solut. 2003, 7, 157–167. [Google Scholar] [CrossRef] [Green Version]
- Bandyopadhyay, A.; Hakim, D.; Funk, B.; Kohn, E.A.; Teolis, C.; Weniger, G.B. System and Method for Locating, Tracking, and/or Monitoring the Status of Personnel and/or Assets Both Indoors and Outdoors. U.S. Patent 9,008,962, 14 April 2015. [Google Scholar]
- Tao, L.; Georgy, J.; Wang, D. Method and Apparatus for Using Map Information Aided Enhanced Portable Navigation. U.S. Patent 14/845,903, 4 September 2015. [Google Scholar]
- Petritoli, E.; Tonino, G.; Fabio, L. Lightweight GNSS/IRS integrated navigation system for UAV vehicles. In Proceedings of the IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 29–30 May 2014. [Google Scholar]
- Reimer, C.; Schneider, T.; Stock, M. INS/GNSS Integration for Aerobatic Flight Applications and Aircraft Motion Surveying. Sensors 2017, 17, 941. [Google Scholar]
- Fox, D.; Burgard, W.; Dellaert, F.; Thrun, S. Monte carlo localization: Efficient position estimation for mobile robots. In Proceedings of the Sixteenth National Conference on Artificial Intelligence and Eleventh Conference on Innovative Applications of Artificial Intelligence (AAAI/IAAI), Orlando, FL, USA, 18–22 July 1999; pp. 343–349. [Google Scholar]
- Georgy, J. Advanced Nonlinear Techniques for Low Cost Land Vehicle Navigation. Ph.D. Thesis, Queen’s University, Kingston, ON, Canada, 2010. [Google Scholar]
- Yu, C.; Lan, H.; Liu, Z.; El-Sheimy, N.; Yu, F. Indoor map aiding/map matching smartphone navigation using auxiliary particle filter. In China Satellite Navigation Conference (CSNC) 2016 Proceedings: Volume I; Springer: Singapore, 2016. [Google Scholar]
- Krach, B.; Roberston, P. Cascaded estimation architecture for integration of foot-mounted inertial sensors. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 112–119. [Google Scholar]
- Yu, C.; Lan, H.; Gu, F.; Yu, F.; El-Sheimy, N. A Map/INS/Wi-Fi Integrated System for Indoor Location-Based Service Applications. Sensors 2017, 17, 1272. [Google Scholar] [CrossRef] [PubMed]
- Courbon, J.; Mezouar, Y.; Martinet, P. Indoor navigation of a non-holonomic mobile robot using a visual memory. Auton. Robot. 2008, 25, 253–266. [Google Scholar] [CrossRef]
- El-Sheimy, N. Inertial Techniques and INS/DGPS Integration; Engo 623-Course Notes; University of Calgary: Calgary, AB, Canada, 2003; pp. 170–182. [Google Scholar]
- Cho, S.Y.; Park, C.G. Mems based pedestrian navigation system. J. Navig. 2006, 59, 135–153. [Google Scholar] [CrossRef]
- Klepal, M.; Beauregard, S. A novel backtracking particle filter for pattern matching indoor localization. In Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments, San Francisco, CA, USA, 14–19 September 2008; ACM: New York, NY, USA; pp. 79–84. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, h Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Beauregard, S.; Klepal, M. Indoor PDR performance enhancement using minimal map information and particle filters. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 141–147. [Google Scholar]
- Cossaboom, M.; Georgy, J.; Karamat, T.; Noureldin, A. Augmented kalman filter and map matching for 3D RISS/GPS integration for land vehicles. Int. J. Navig. Obs. 2012, 2012. [Google Scholar] [CrossRef]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved techniques for grid mapping with rao-blackwellized particle filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef]
- Zhang, X.; Cheng, Y.; Shi, C. Observability analysis of non-holonomic constraints for land-vehicle navigation systems. J. Glob. Position. Syst. 2012, 11, 80–88. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Samsung S4 | Xiaomi 3 |
|---|---|---|
| Model | Model | |
| Accelerometer | STM K3DH | MPU6050 |
| Gyroscope | STM K3G | MPU6050 |
| Particles | Algorithm | Error (m) | |||
|---|---|---|---|---|---|
| Max. | Min. | Mean | RMS | ||
| 1500 | ASIR(MA) | 2.97 | 0.001 | 1.23 | 1.47 |
| MM-ARIR | 3.15 | 0.0001 | 1.34 | 1.57 | |
| 1200 | ASIR(MA) | 5.15 | 0.003 | 1.67 | 1.97 |
| MM-ARIR | 5.35 | 0.003 | 1.69 | 1.98 | |
| 600 | ASIR(MA) | 4.18 | 0.004 | 1.70 | 2.37 |
| MM-ASIR | 4.18 | 0.004 | 1.78 | 2.32 | |
| 500 | ASIR(MA) | 3.72 | 0.008 | 1.79 | 2.43 |
| MM-ARIR | 3.74 | 0.008 | 1.66 | 2.22 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, C.; El-Sheimy, N.; Lan, H.; Liu, Z. Map-Based Indoor Pedestrian Navigation Using an Auxiliary Particle Filter. Micromachines 2017, 8, 225. https://doi.org/10.3390/mi8070225
Yu C, El-Sheimy N, Lan H, Liu Z. Map-Based Indoor Pedestrian Navigation Using an Auxiliary Particle Filter. Micromachines. 2017; 8(7):225. https://doi.org/10.3390/mi8070225
Chicago/Turabian StyleYu, Chunyang, Naser El-Sheimy, Haiyu Lan, and Zhenbo Liu. 2017. "Map-Based Indoor Pedestrian Navigation Using an Auxiliary Particle Filter" Micromachines 8, no. 7: 225. https://doi.org/10.3390/mi8070225
APA StyleYu, C., El-Sheimy, N., Lan, H., & Liu, Z. (2017). Map-Based Indoor Pedestrian Navigation Using an Auxiliary Particle Filter. Micromachines, 8(7), 225. https://doi.org/10.3390/mi8070225