Post-Release Deformation and Motion Control of Photonic Waveguide Beams by Tuneable Electrothermal Actuators in Thick SiO2


Abstract
:
1. Introduction
2. Design and Fabrication
2.1. Design Variants
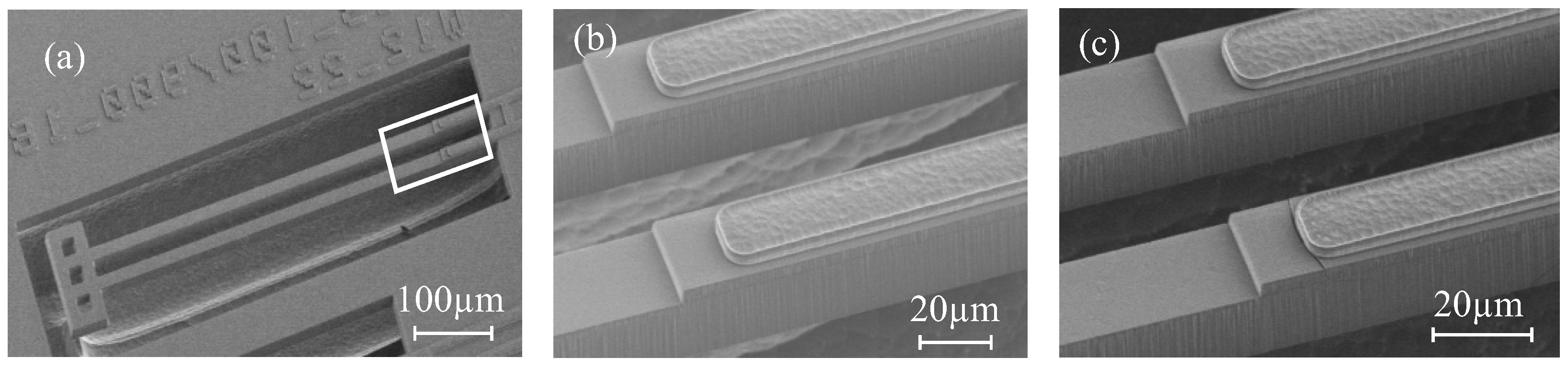
2.2. Fabrication
2.3. Basic Models
3. Experimental Results
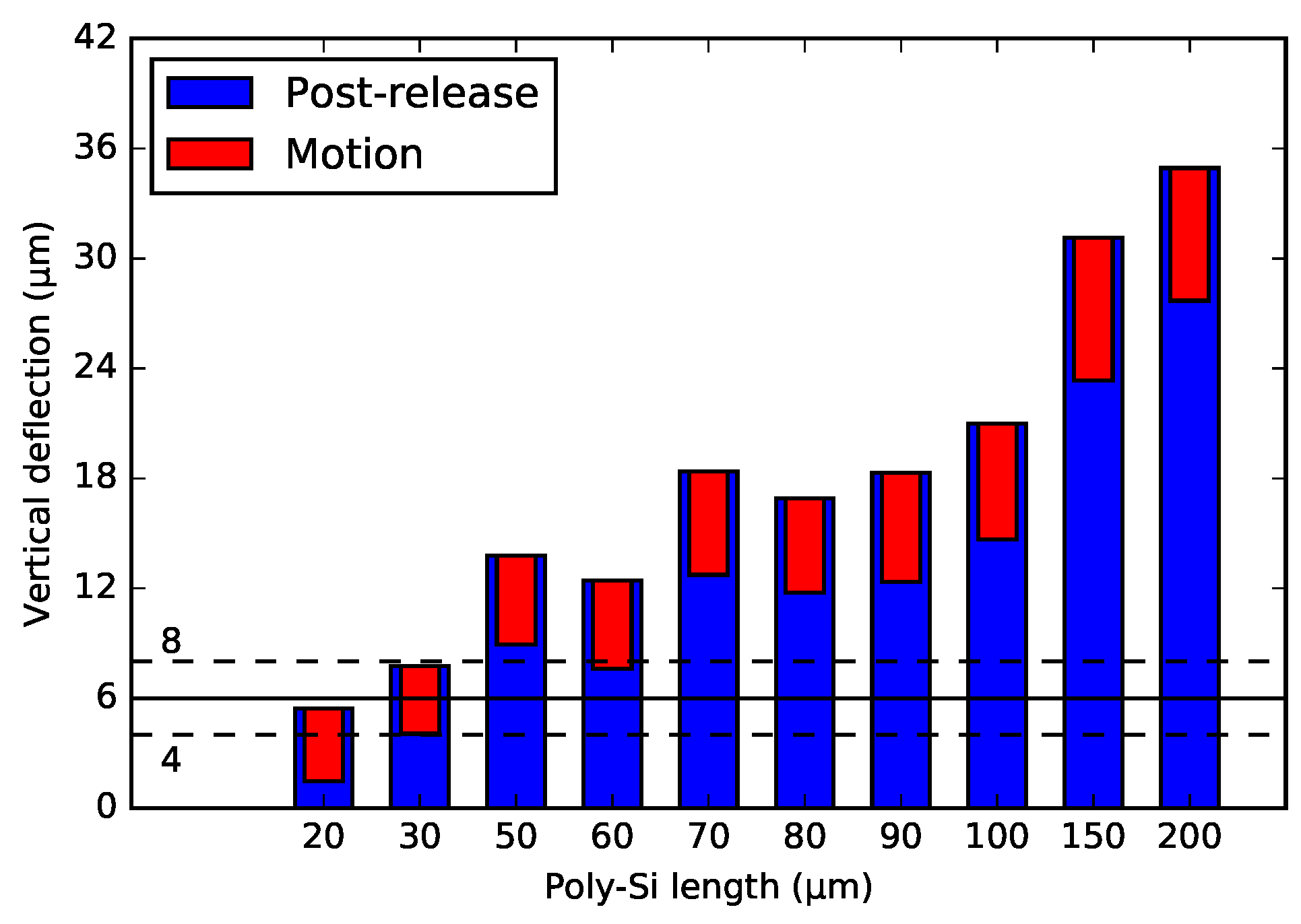
3.1. Varying Poly-Si Length versus Post-Release Deformation
3.2. Varying Poly-Si Length versus Motion
3.3. Post-Release Deformation of Separate Bimorph Actuator (SBA) and Integrated Bimorph Actuator (IBA)
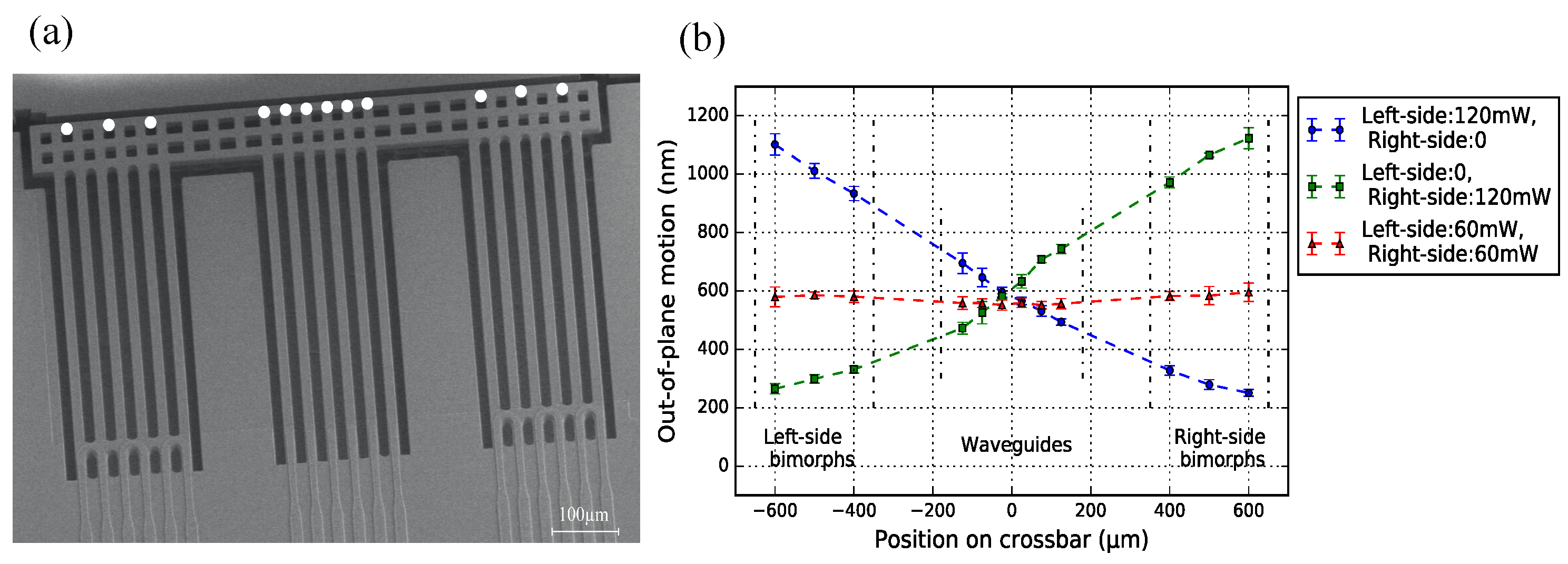
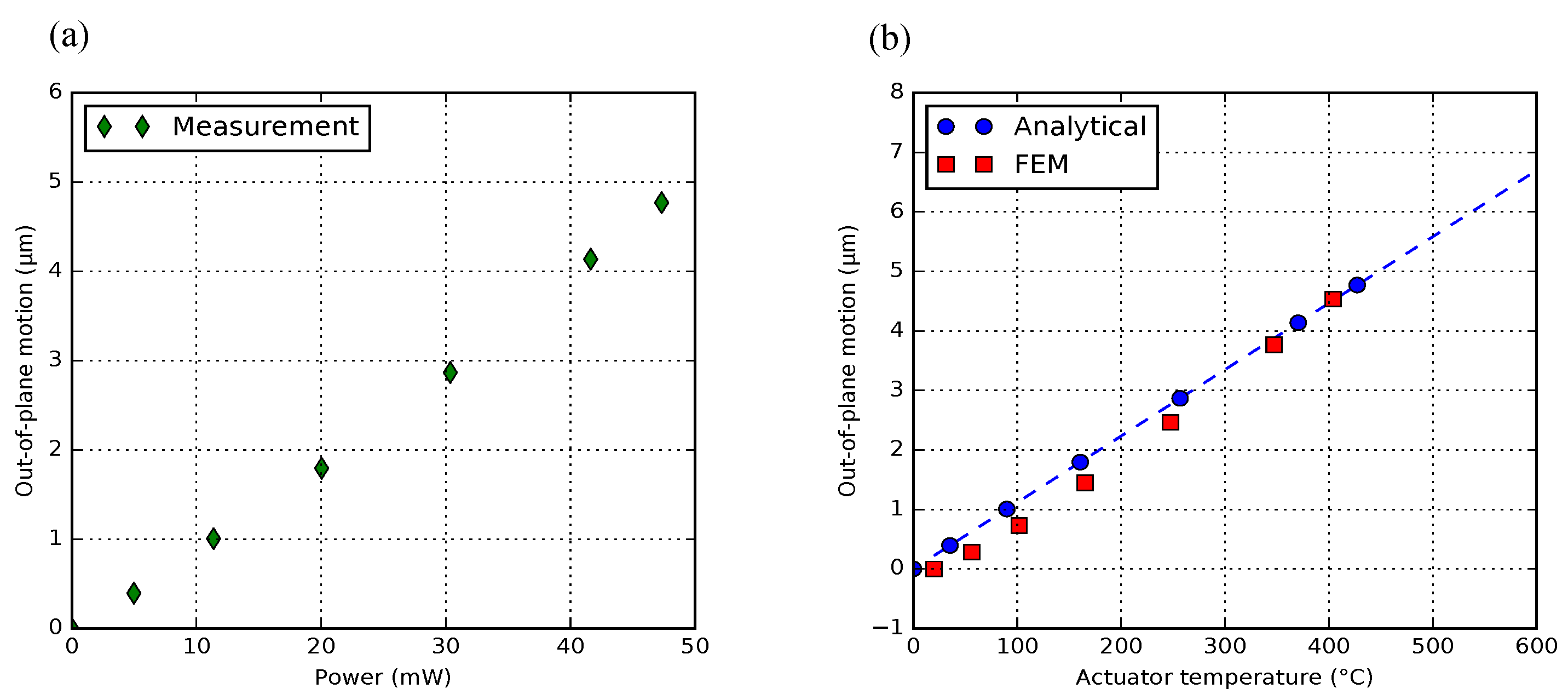
3.4. Motion of Separate Bimorph Actuator (SBA) and Integrated Bimorph Actuator (IBA)
4. Discussion
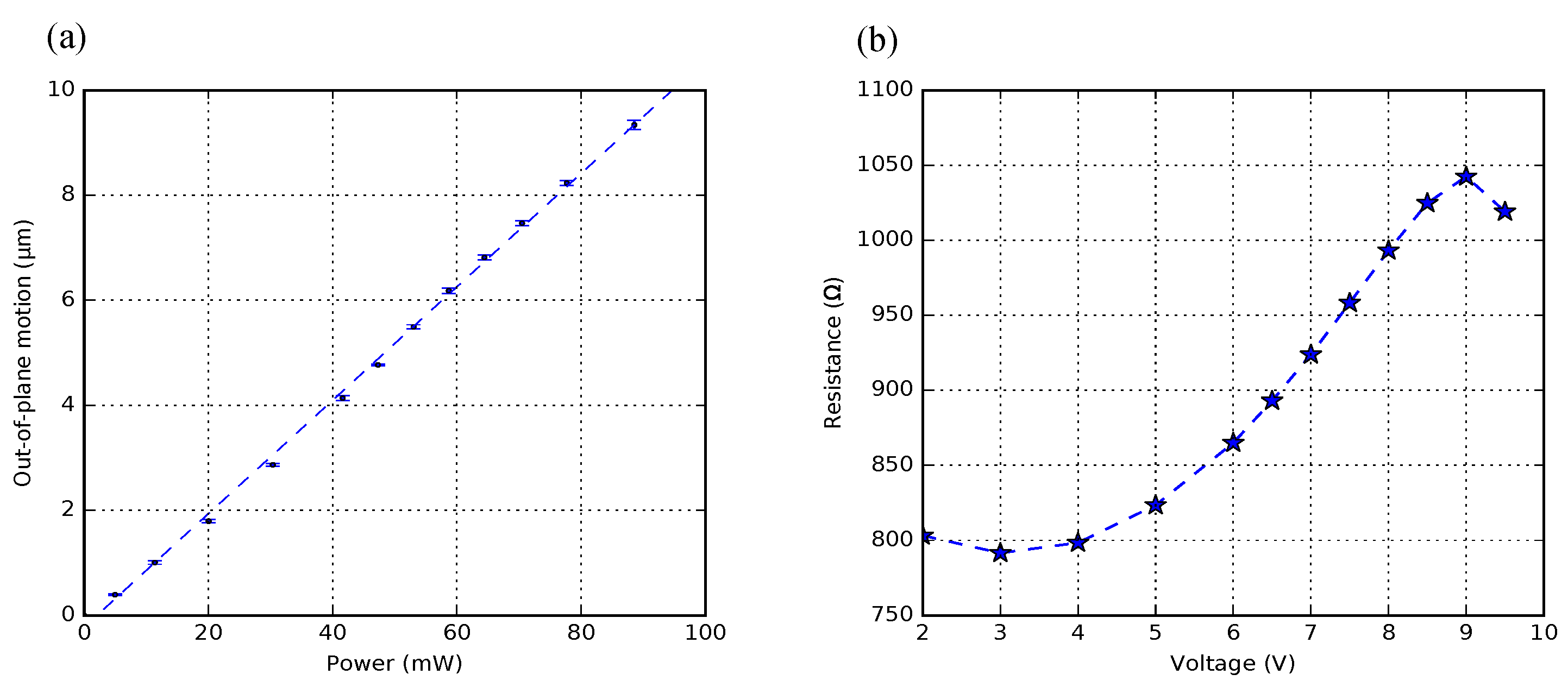
4.1. Motion Limit
4.2. Bridge Design and Non-Bridge Design
4.3. Temperature Estimation
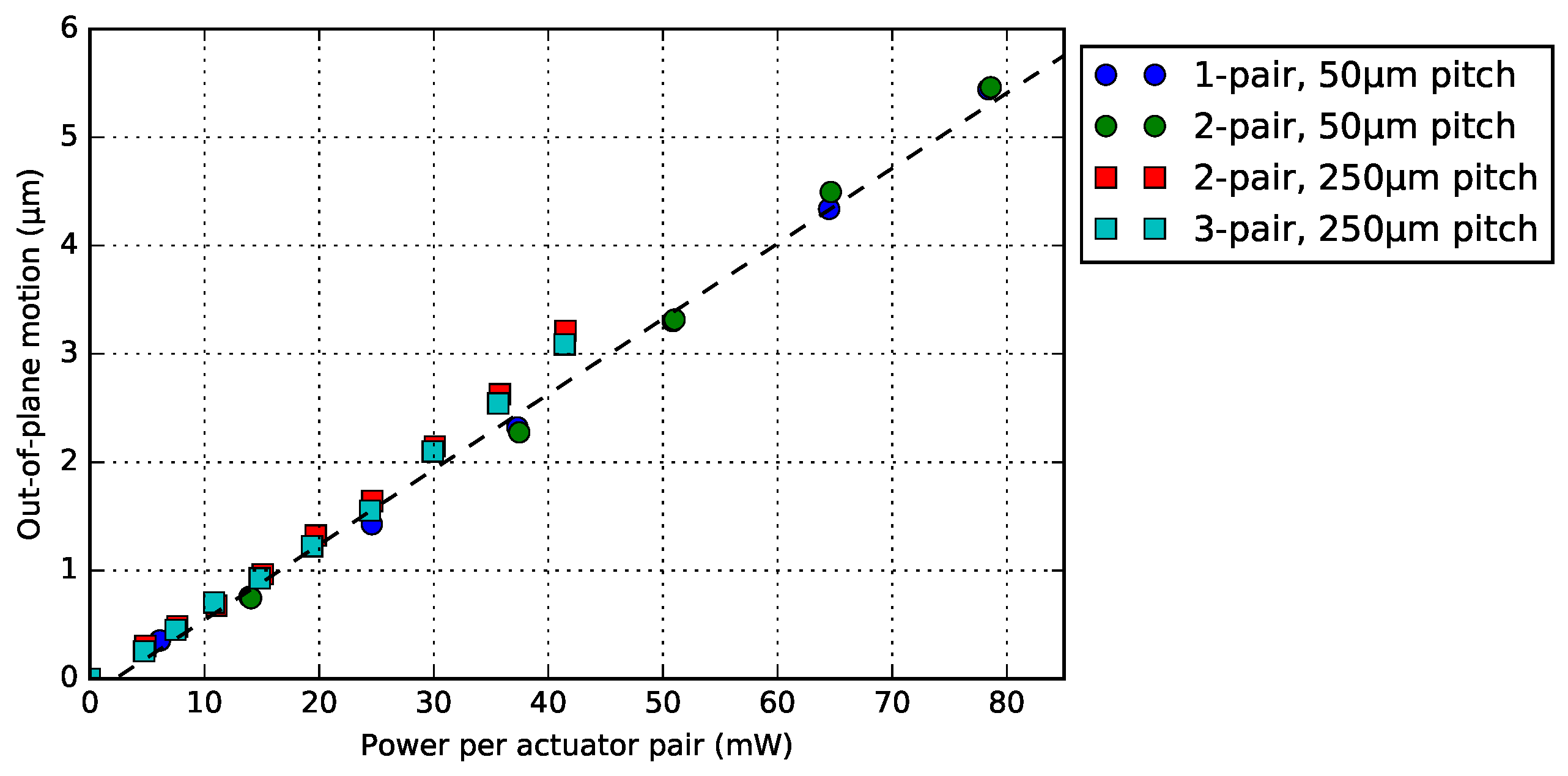
4.4. Bimorph Actuator Pitch and Number of Pairs
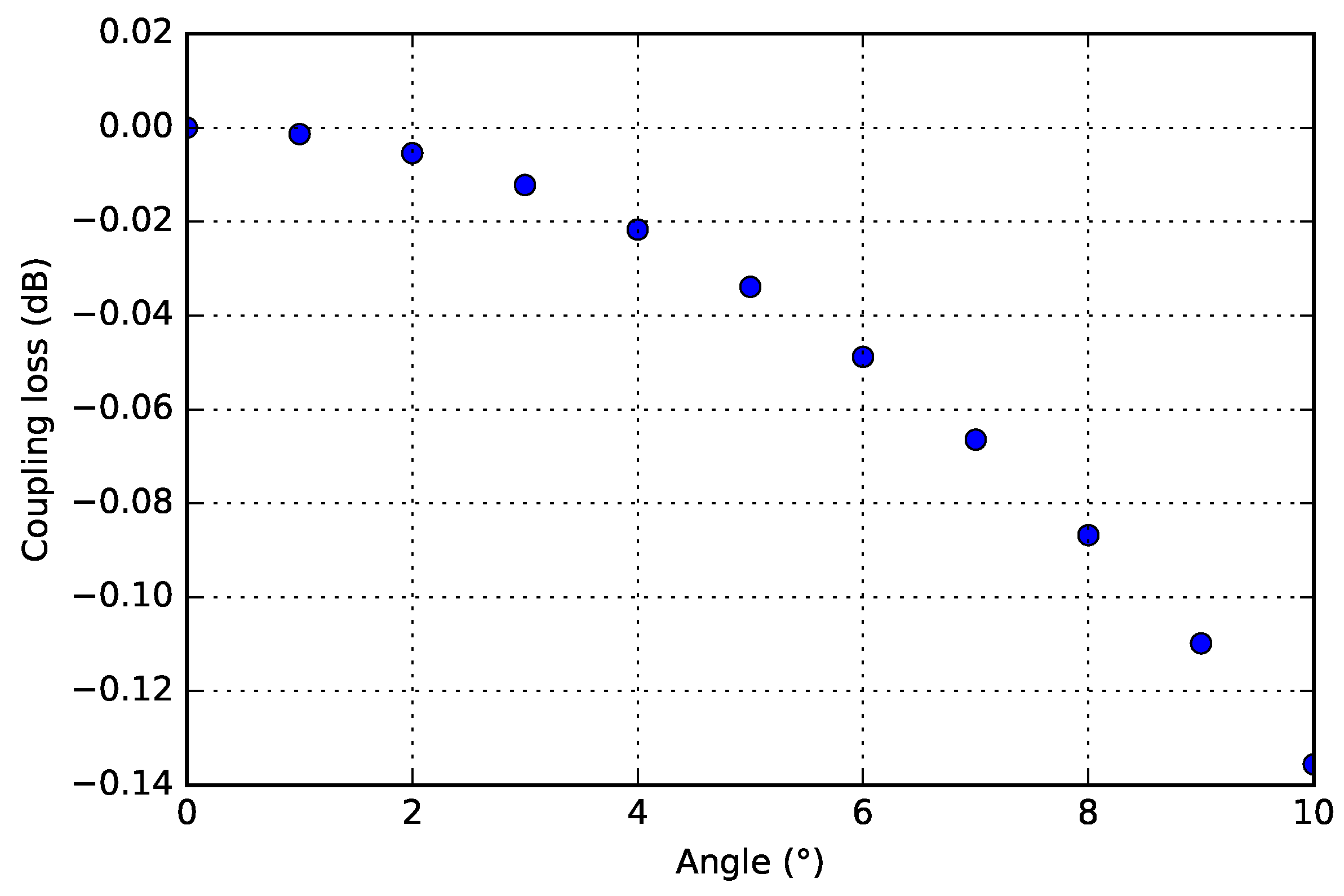
4.5. Propagation and Coupling with Curved Beams
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PIC | Photonic integrated circuit |
| MEMS | Micro-electromechanical systems |
| LTCC | Low Temperature Co-fired Ceramics |
| RF | Radio frequency |
| I/O | Input/Output |
| SEM | Scanning electron microscope |
| PECVD | Plasma-enhanced chemical vapor deposition |
| CTE | Coefficient of thermal expansion |
| WG | Waveguide |
| BD | Bridge design |
| NBD | Non-bridge design |
| IBA | Integrated bimorph actuator |
| SBA | Separate bimorph actuator |
Appendix A. Main Design Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Rationale |
|---|---|---|---|
| Number of WG beams | 2/4/6 | p + m | |
| WG beam thickness (m) | 16 | p | |
| WG beam width (m) | 22 | p + m | |
| WG beam length, including crossbar (m) | 900 | m | |
| Crossbar width (m) | 72 | m | |
| WG beam pitch (m) | 50/250 | p | |
| Number of actuator pairs (two beams per pair) | 1/2/3 | m | |
| Poly-Si width | 12 | m | |
| Poly-Si thickness (m) | 5 | m | |
| Poly-Si length (m) | 20–200 | m | |
| Actuator beam pitch (m) | 50 | m | |
| Distance between WG and actuators (m) | 250 | p + m |
Appendix B. Fabrication Process

Appendix C. Analytical Multilayer Single-Beam Model

| Layer | 1 | 2 | 3 |
|---|---|---|---|
| Material | TriPleX (SiO ) | Poly-Si | PECVD SiO |
| Beam width: b (m) | ∼20 m | ∼12 m | ∼12 m |
| Beam thickness: t (m) | 16 | 5 | 2 |
| Young’s Modulus: E (GPa) | 70 | 160 | 75 |
| Coefficient of thermal expansion (CTE): ( /) | 0.5 | 3.44 | 2.5 |
| Residual stress *: (MPa) | −19.2 | 56.1 | 61.5 |
References
- Smit, M.; Leijtens, X.; Ambrosius, H.; Bente, E.; van der Tol, J.; Smalbrugge, B.; de Vries, T.; Geluk, E.J.; Bolk, J.; van Veldhoven, R.; et al. An introduction to InP-based generic integration technology. Semicond. Sci. Technol. 2014, 29, 083001. [Google Scholar] [CrossRef] [Green Version]
- Wörhoff, K.; Heideman, R.G.; Leinse, A.; Hoekman, M. TriPleX: A versatile dielectric photonic platform. Adv. Opt. Technol. 2015, 4, 189–207. [Google Scholar] [CrossRef]
- PHASTFlex FP7 EU Project. Available online: http://www.phastflex.eu (accessed on 25 January 2018).
- Williams, K.; Docter, B. Trends in High Speed Interconnects: InP Monolithic Integration. In Optical Switching in Next Generation Data Centers; Testa, F., Pavesi, L., Eds.; Springer: Cham, Switzerland, 2018; pp. 279–297. [Google Scholar]
- Barwicz, T.; Taira, Y.; Lichoulas, T.W.; Boyer, N.; Numata, H.; Martin, Y.; Nah, J.W.; Takenobu, S.; Janta-Polczynski, A.; Kimbrell, E.; et al. Photonic Packaging in High-Throughput Microelectronic Assembly Lines for Cost-Efficiency and Scalability. In Proceedings of the 2015 Optical Fiber Communications Conference and Exhibition (OFC), Los Angeles, CA, USA, 22–26 March 2015; p. W3H.4. [Google Scholar]
- Wörhoff, K.; Prak, A.; Postma, F.; Leinse, A.; Wu, K.; Peters, T.J.; Tichem, M.; Amaning-Appiah, B.; Renukappa, V.; Vollrath, G.; et al. Photonic Hybrid Assembly through Flexible Waveguides. In Silicon Photonics and Photonic Integrated Circuits V; Vivien, L., Pavesi, L., Pelli, S., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2016. [Google Scholar]
- Peters, T.; Tichem, M. Mechanically flexible waveguide arrays for optical chip-to-chip coupling. In MOEMS and Miniaturized Systems XV; Piyawattanametha, W., Park, Y.H., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2016. [Google Scholar]
- Peters, T.J.; Tichem, M. On-chip positionable photonic waveguides for chip-to-chip optical interconnects. In Silicon Photonics and Photonic Integrated Circuits V; Vivien, L., Pavesi, L., Pelli, S., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2016. [Google Scholar]
- Peters, T.; Tichem, M. Electrothermal Actuators for SiO2 Photonic MEMS. Micromachines 2016, 7, 200. [Google Scholar] [CrossRef]
- Peters, T.J.; Tichem, M. On-Chip Positionable Waveguides for Submicrometric Photonic Alignment. J. Microelectromech. Syst. 2017, 26, 1259–1271. [Google Scholar] [CrossRef]
- Kelly, D.; Pruessner, M.; Amarnath, K.; Datta, M.; Kanakaraju, S.; Calhoun, L.; Ghodssi, R. Monolithic Suspended Optical Waveguides for InP MEMS. IEEE Photonics Technol. Lett. 2004, 16, 1298–1300. [Google Scholar] [CrossRef]
- Ng, W.H.; Podoliak, N.; Horak, P.; Wu, J.; Liu, H.; Stewart, W.J.; Kenyon, A.J. Design and Fabrication of Suspended Indium Phosphide Waveguides for MEMS-Actuated Optical Buffering. IEEE J. Sel. Top. Quantum Electron. 2015, 21, 240–246. [Google Scholar] [CrossRef]
- Liu, H.B.; Chollet, F. Moving Polymer Waveguides and Latching Actuator for 2 × 2 MEMS Optical Switch. J. Microelectromech. Syst. 2009, 18, 715–724. [Google Scholar]
- Horváth, R.; Lindvold, L.R.; Larsen, N.B. Fabrication of all-polymer freestanding waveguides. J. Micromech. Microeng. 2003, 13, 419–424. [Google Scholar] [CrossRef]
- Penades, J.S.; Ortega-Moñux, A.; Nedeljkovic, M.; Wangüemert-Pérez, J.G.; Halir, R.; Khokhar, A.Z.; Alonso-Ramos, C.; Qu, Z.; Molina-Fernández, I.; Cheben, P.; et al. Suspended silicon mid-infrared waveguide devices with subwavelength grating metamaterial cladding. Opt. Express 2016, 24, 22908. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.X.; Du, Y.; Tan, C.W.; Zhang, J.; Yu, M.B.; Yeoh, W.G.; Lo, G.Q.; Kwong, D.L. A Silicon Platform With MEMS Active Alignment Function and Its Potential Application in Si-Photonics Packaging. IEEE J. Sel. Top. Quantum Electron. 2010, 16, 267–275. [Google Scholar] [CrossRef]
- Solgaard, O.; Godil, A.A.; Howe, R.T.; Lee, L.P.; Peter, Y.A.; Zappe, H. Optical MEMS: From Micromirrors to Complex Systems. J. Microelectromech. Syst. 2014, 23, 517–538. [Google Scholar] [CrossRef]
- Han, F.; Wang, W.; Zhang, X.; Xie, H. Modeling and Control of a Large-Stroke Electrothermal MEMS Mirror for Fourier Transform Microspectrometers. J. Microelectromech. Syst. 2016, 25, 750–760. [Google Scholar] [CrossRef]
- Jovic, A.; Pandraud, G.; Sanchez, N.; Sancho, J.; Zinoviev, K.; Rubio, J.L.; Margallo, E.; Sarro, P.M. Two novel MEMS actuator systems for self-aligned integrated 3D optical coherent tomography scanners. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 797–800. [Google Scholar]
- Ollier, E. Optical MEMS devices based on moving waveguides. IEEE J. Sel. Top. Quantum Electron. 2002, 8, 155–162. [Google Scholar] [CrossRef]
- Wu, K.; Tichem, M. In-plane positioning of flexible silicon-dioxide photonic waveguides. In Proceedings of the 2017 International 433 Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Montreal, QC, Canada, 17–21 July 2017; pp. 1–6. [Google Scholar]
- Wu, K.; Peters, T.J.; Tichem, M.; Postma, F.; Prak, A.; Wörhoff, K.; Leinse, A. Bimorph actuators in thick SiO2 for photonic alignment. In Optical Interconnects XVI; Schröder, H., Chen, R.T., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2016. [Google Scholar]
- Chu, W.H.; Mehregany, M.; Mullen, R.L. Analysis of tip deflection and force of a bimetallic cantilever microactuator. J. Micromech. Microeng. 1993, 3, 4. [Google Scholar] [CrossRef]
- Scott, S.; Kim, J.I.; Sadeghi, F.; Peroulis, D. An Analytical Capacitance Model of Temperature-Sensitive, Large-Displacement Multimorph Cantilevers: Numerical and Experimental Validation. J. Microelectromech. Syst. 2012, 21, 161–170. [Google Scholar] [CrossRef]
- Ehmann, M.; Ruther, P.; von Arx, M.; Paul, O. Operation and short-term drift of polysilicon-heated CMOS microstructures at temperatures up to 1200 K. J. Micromech. Microeng. 2001, 11, 397–401. [Google Scholar] [CrossRef]
- Deladi, S.; Krijnen, G.J.M.; Elwenspoek, M.C. Distinction of the irreversible and reversible actuation regions of B-doped poly-Si based electrothermal actuators. J. Micromech. Microeng. 2004, 14, S31–S36. [Google Scholar] [CrossRef]
- Marcuse, D. Tilt, offset, and end-separation loss of lowest-order slab waveguide mode. J. Lightwave Technol. 1986, 4, 1647–1650. [Google Scholar] [CrossRef]
- Leijtens, X.; Santos, R.; Tichem, M.; Wörhoff, K.; Williams, K. MEMS-assisted fiber-chip coupling. In Proceedings of the ECIO 2017 Proceedings 19th European Conference on Integrated Optics (ECIO), Eindhoven, The Netherlands, 3–5 April 2017. [Google Scholar]
























© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, K.; Tichem, M. Post-Release Deformation and Motion Control of Photonic Waveguide Beams by Tuneable Electrothermal Actuators in Thick SiO2. Micromachines 2018, 9, 496. https://doi.org/10.3390/mi9100496
Wu K, Tichem M. Post-Release Deformation and Motion Control of Photonic Waveguide Beams by Tuneable Electrothermal Actuators in Thick SiO2. Micromachines. 2018; 9(10):496. https://doi.org/10.3390/mi9100496
Chicago/Turabian StyleWu, Kai, and Marcel Tichem. 2018. "Post-Release Deformation and Motion Control of Photonic Waveguide Beams by Tuneable Electrothermal Actuators in Thick SiO2" Micromachines 9, no. 10: 496. https://doi.org/10.3390/mi9100496
APA StyleWu, K., & Tichem, M. (2018). Post-Release Deformation and Motion Control of Photonic Waveguide Beams by Tuneable Electrothermal Actuators in Thick SiO2. Micromachines, 9(10), 496. https://doi.org/10.3390/mi9100496