A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip




Abstract
:1. Introduction
2. System Architecture of the SOI MEMS Resonator and CMOS Sustaining Amplifier
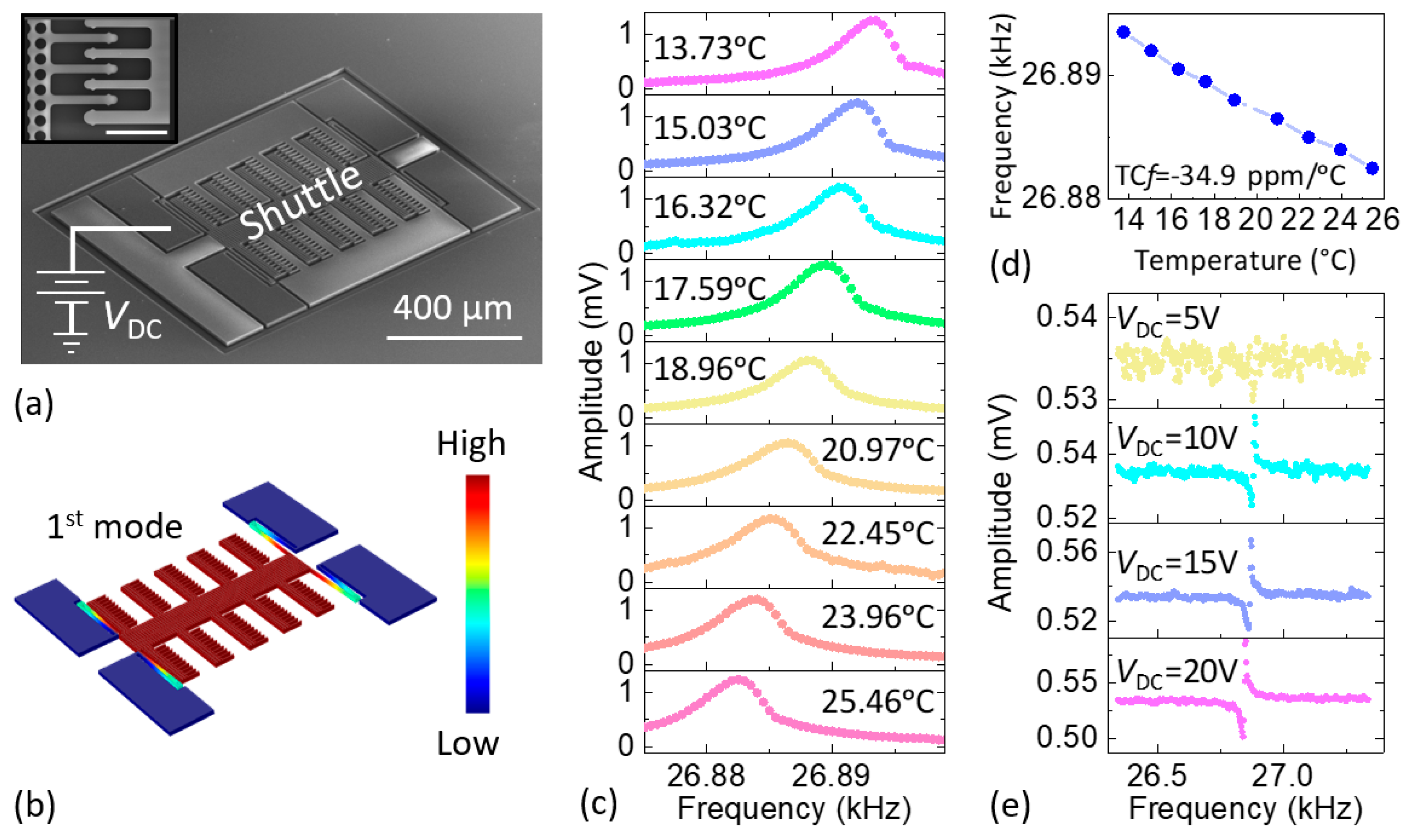
2.1. Overview of the SOI MEMS Resonator
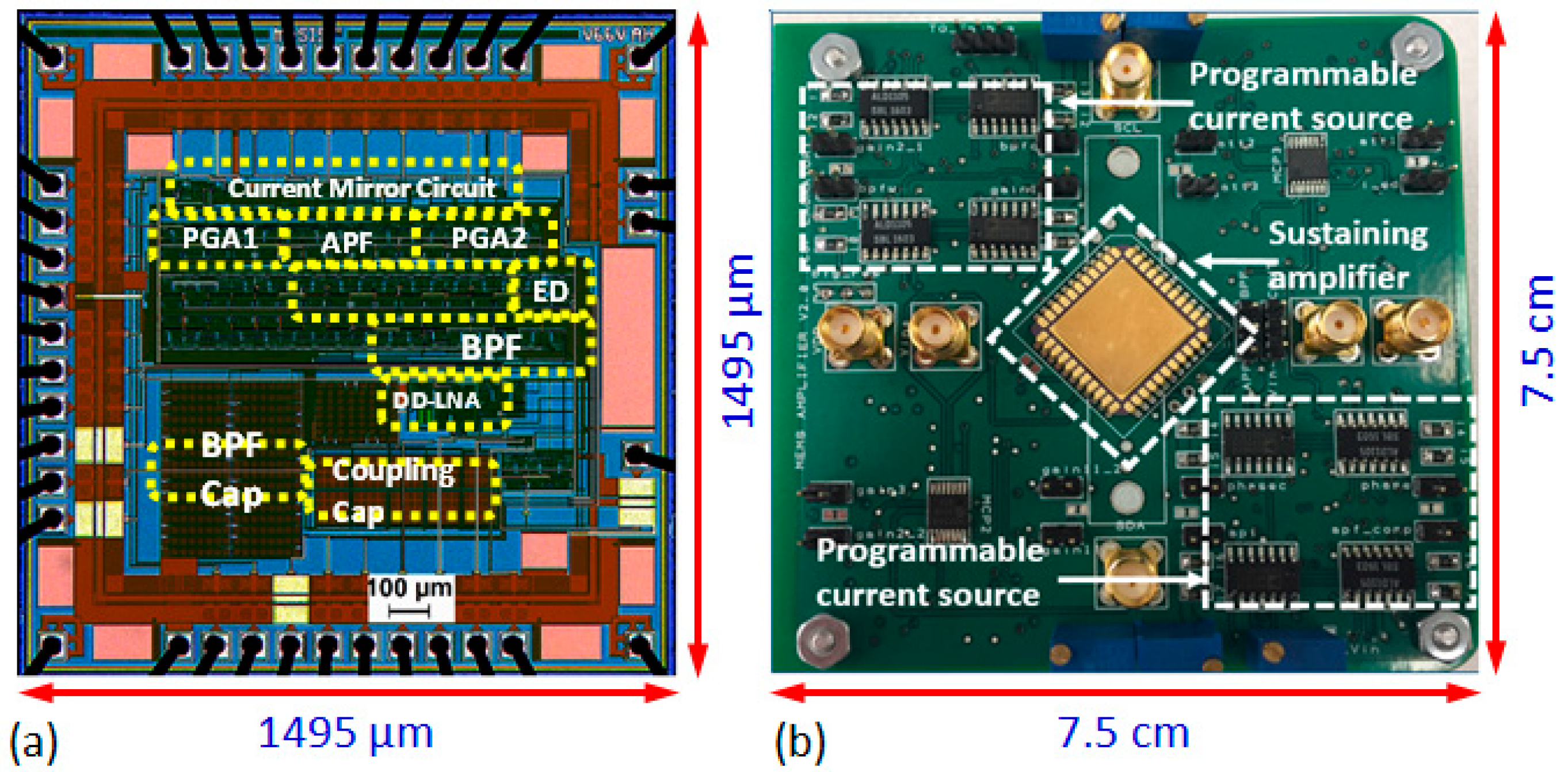
2.2. Overview of the Programmable Single-Chip CMOS Sustaining Amplifier
3. Oscillator Referred to the Single-Crystal SOI MEMS Resonator
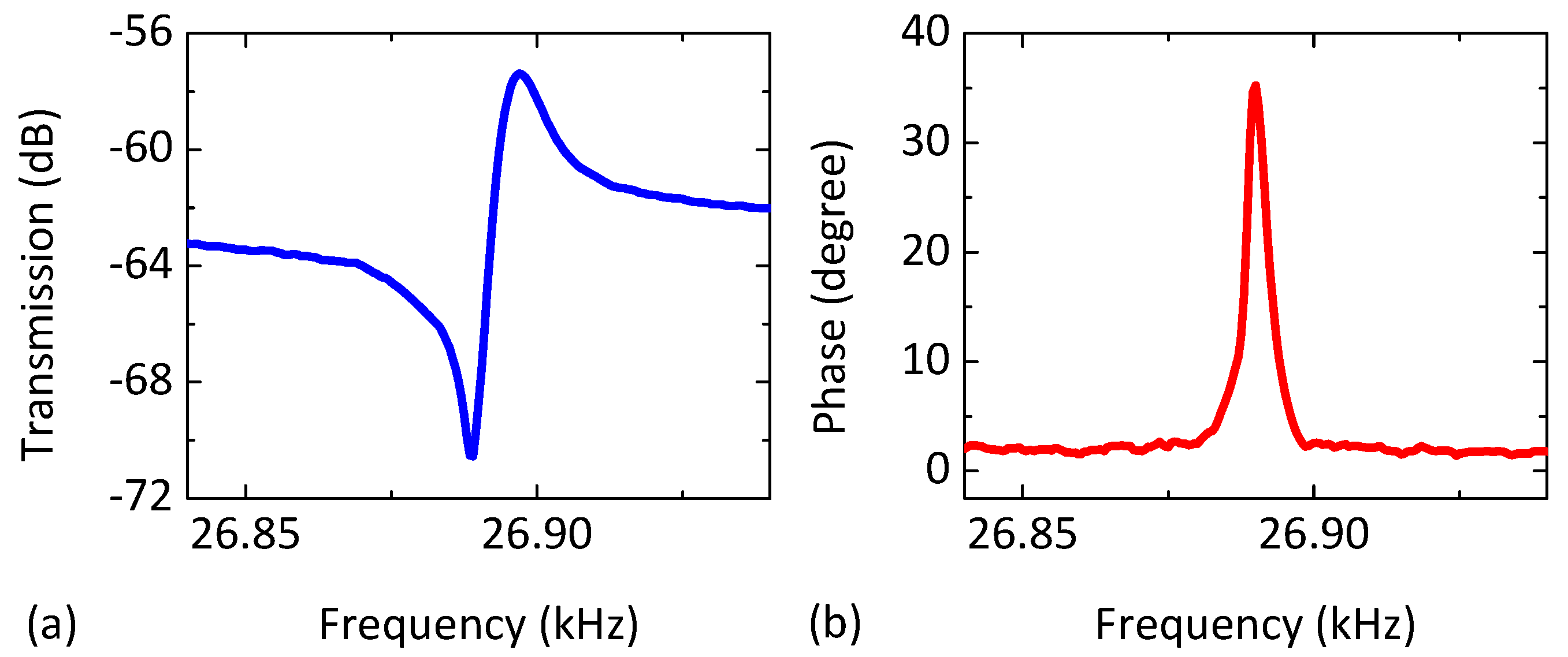
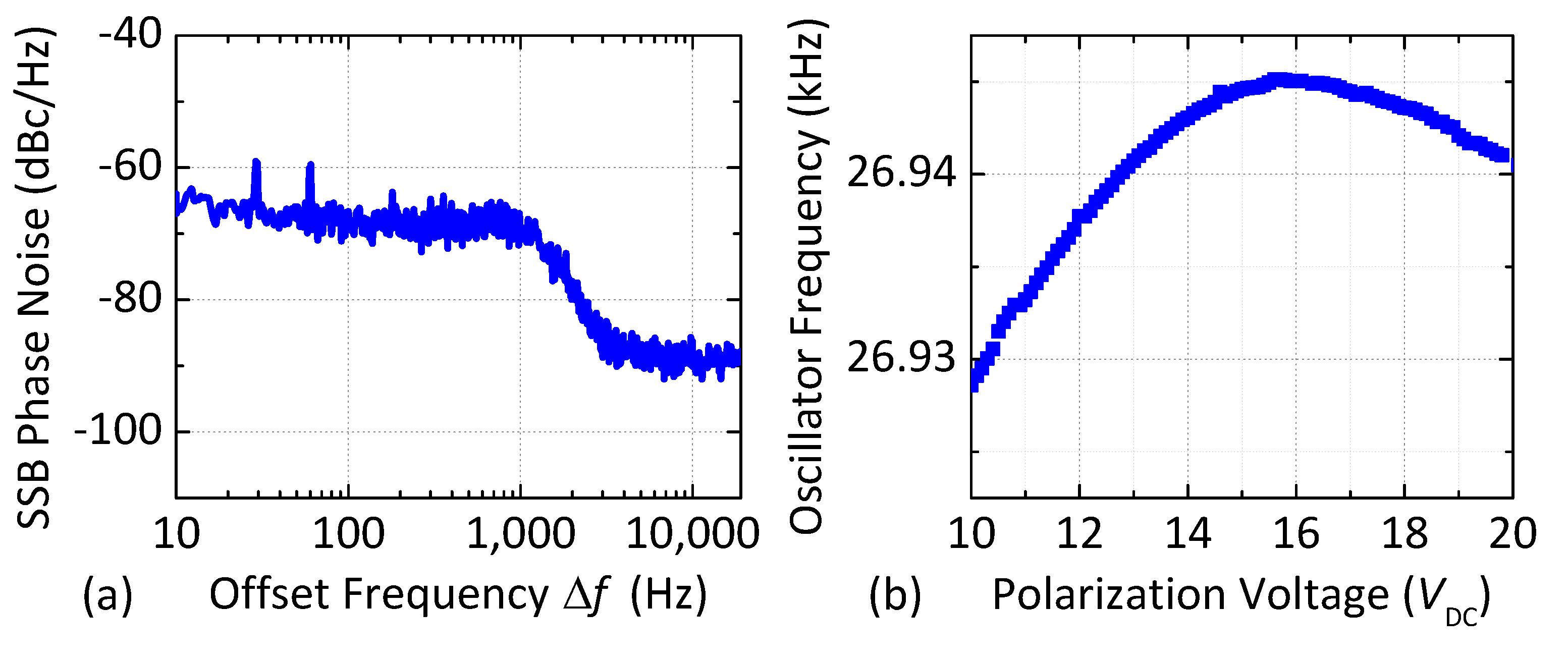
3.1. Oscillator System
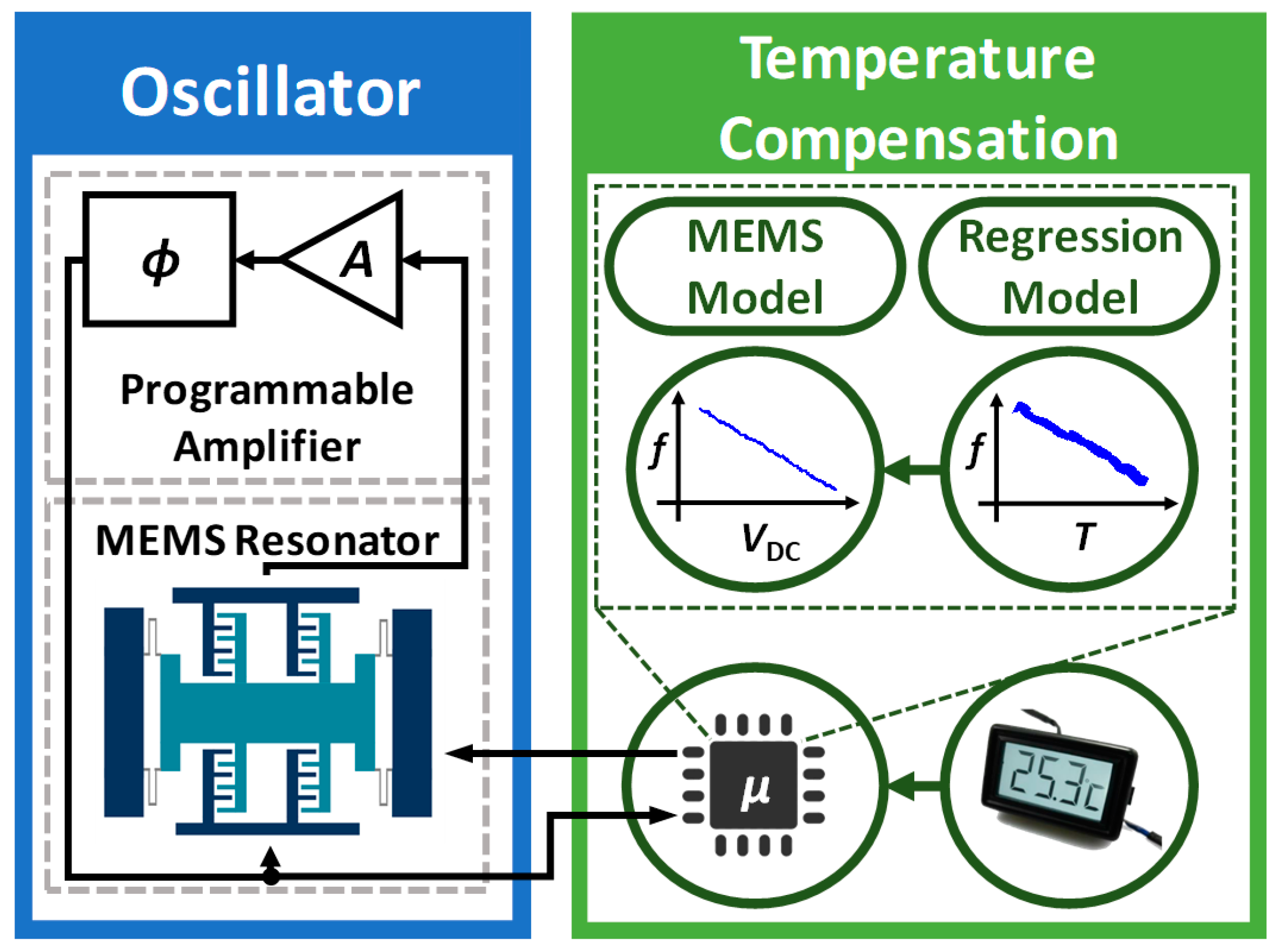
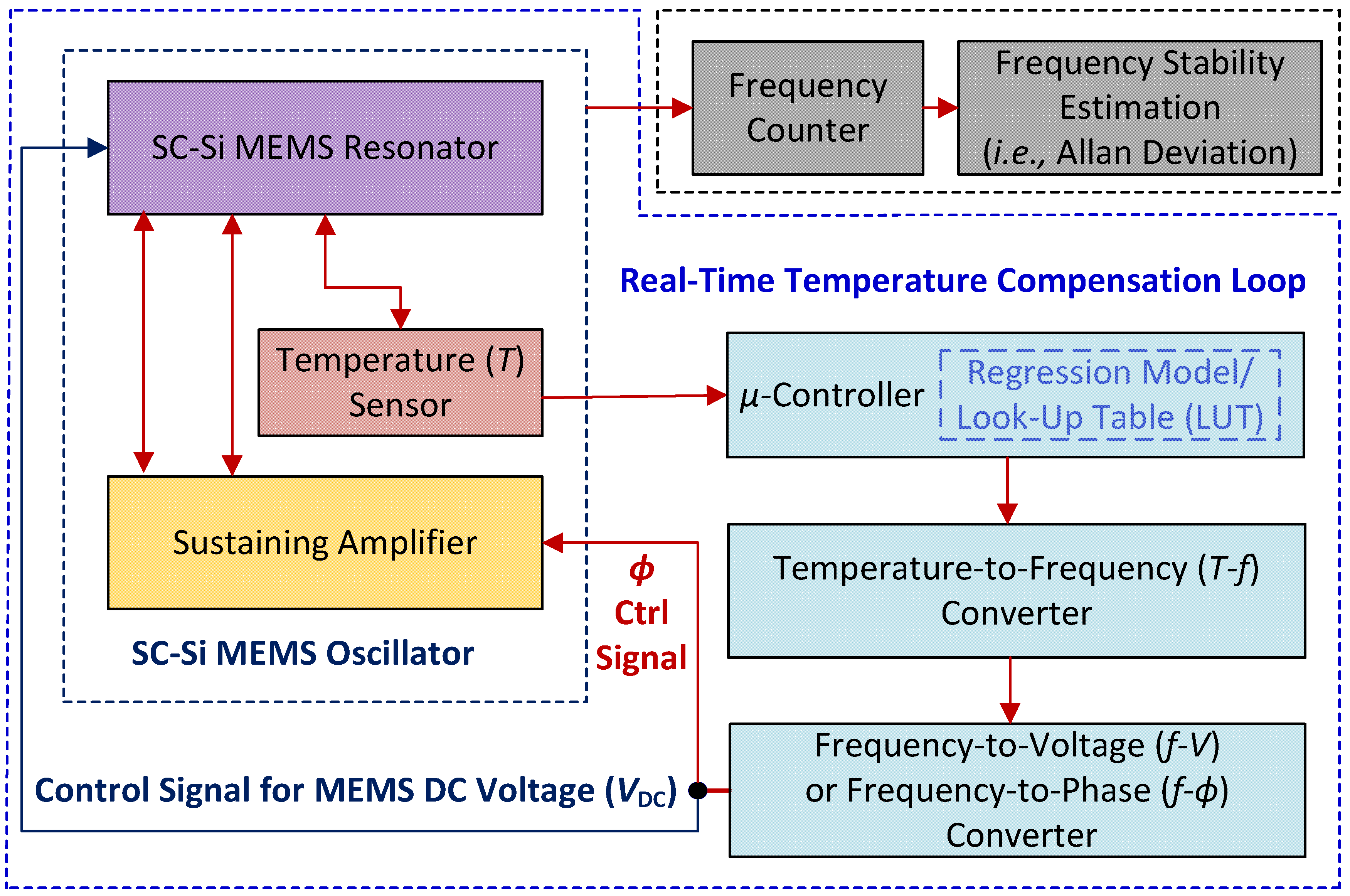
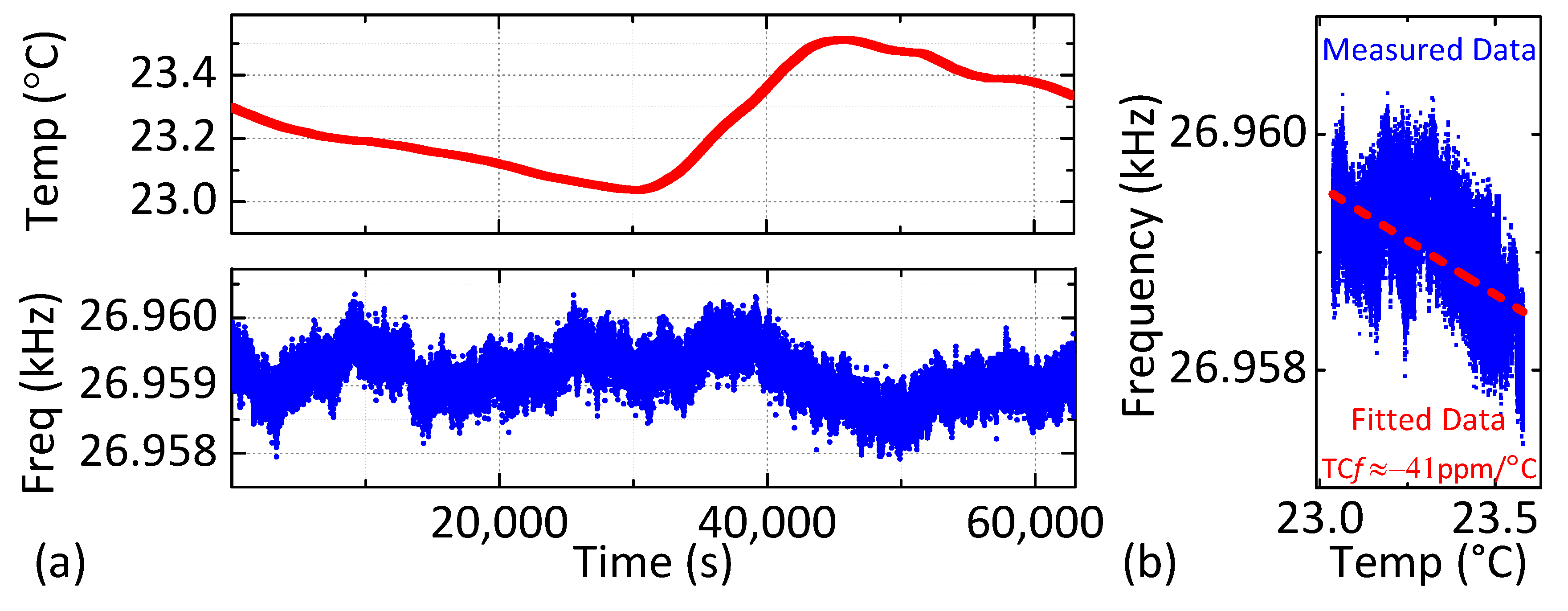
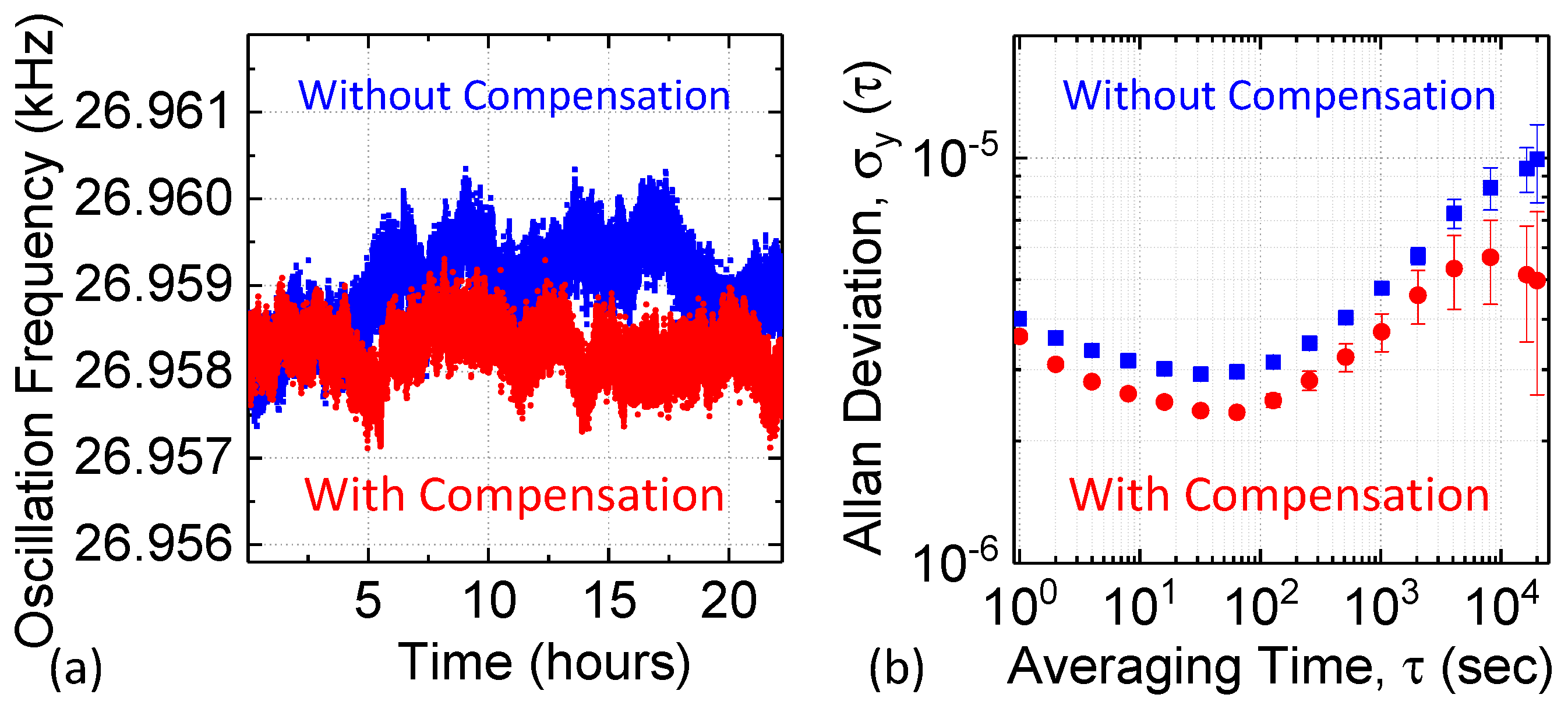
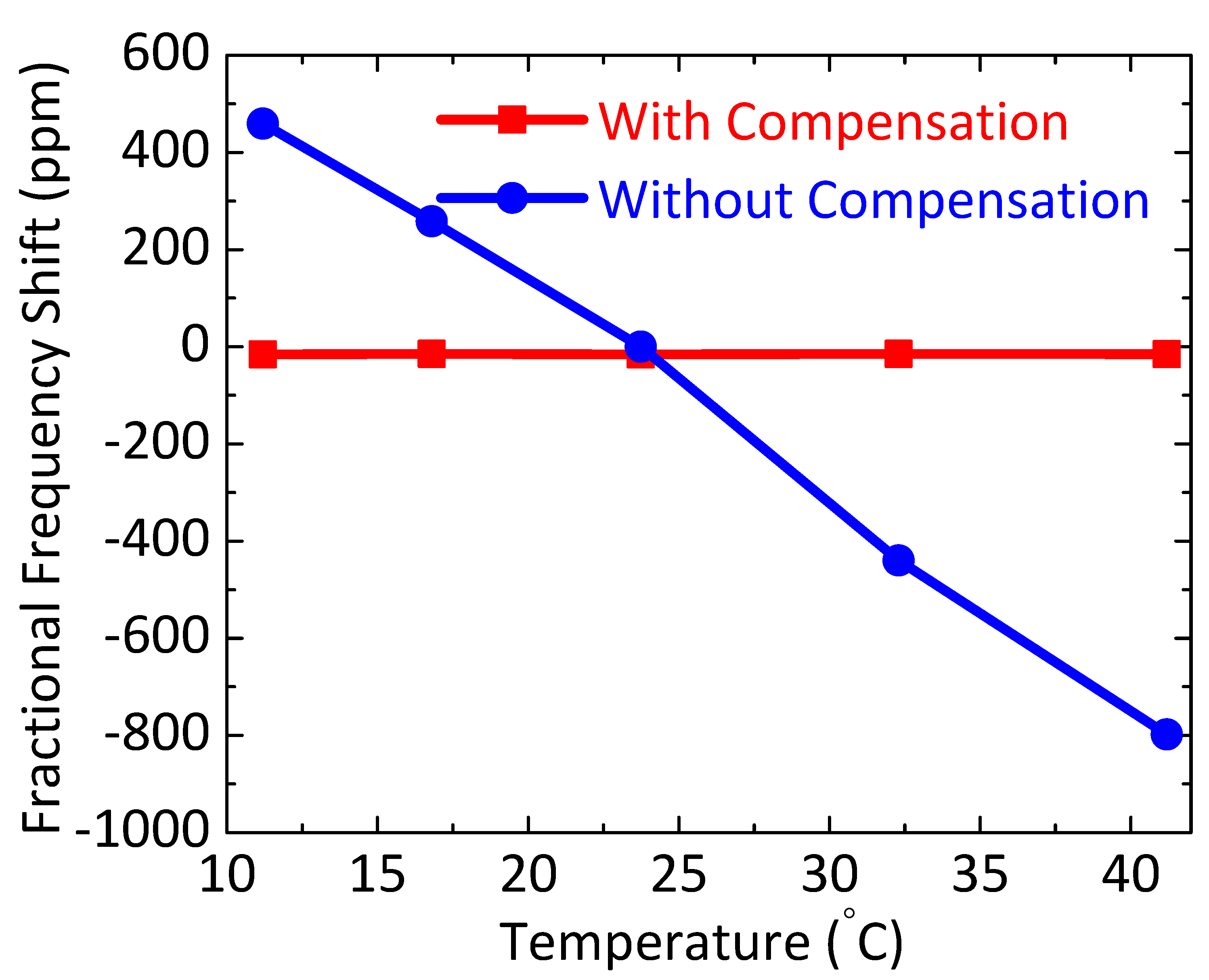
3.2. Temperature Compensation of the MEMS-Referenced Oscillator
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vig, J.R. Temperature-insensitive dual-mode resonant sensors—a review. IEEE Sens. J. 2001, 1, 62–68. [Google Scholar] [CrossRef]
- Nguyen, C.T.-C. MEMS technology for timing and frequency control. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 251–270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, C.T.-C.; Howe, R.T. An integrated CMOS micromechanical resonator high-Q oscillator. IEEE J. Solid State Circuits 1999, 34, 440–455. [Google Scholar] [CrossRef]
- Thakar, V.; Rais-Zadeh, M. Temperature-compensated piezoelectrically actuated Lame mode resonators. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2014), San Francisco, CA, USA, 26–30 January 2014; pp. 214–217. [Google Scholar]
- Lee, H.; Partridge, A.; Assaderaghi, F. Low jitter and temperature stable MEMS oscillators. In Proceedings of the IEEE International Frequency Control Symposium (IFCS), Baltimore, MD, USA, 21–24 May 2012; pp. 266–270. [Google Scholar]
- Clark, J.R.; Nguyen, C.T.-C. Mechanically temperature-compensated flexural-mode micromechanical resonators. In Proceedings of the International Electron Devices Meeting, San Francisco, CA, USA, 10–13 December 2000; pp. 399–402. [Google Scholar]
- Hsu, W.-T.; Nguyen, C.T.-C. Stiffness-compensated temperature-insensitive micromechanical resonators. In Proceedings of the International Conference on Micro Electro Mechanical Systems (MEMS 2002), Las Vegas, NV, USA, 20–24 January 2002; pp. 731–734. [Google Scholar] [Green Version]
- Sundaresan, K.; Allen, P.E.; Ayazi, F. Process and temperature compensation in a 7-MHz CMOS clock oscillator. IEEE J. Solid State Circuits 2006, 41, 433–442. [Google Scholar] [CrossRef]
- Salvia, J.C.; Melamud, R.; Chandorkar, S.A.; Lord, S.F.; Kenny, T.W. Real-time temperature compensation of mems oscillators using an integrated micro-oven and a phase-locked loop. J. Microelectromech. Syst. 2010, 19, 192–201. [Google Scholar] [CrossRef]
- Samarao, A.K.; Ayazi, F. Temperature compensation of silicon resonators via degenerate doping. IEEE Trans. Electron. Devices 2012, 59, 87–93. [Google Scholar] [CrossRef]
- Rais-Zadeh, M.; Thakar, V.A.; Wu, Z.; Peczalski, A. Temperature compensated silicon resonators for space applications. In Proceedings of the Reliability, Packaging, Testing, and Characterization of MOEMS/MEMS and Nanodevices XII, San Francisco, CA, USA, 9 March 2013; SPIE: Bellingham, WA, USA, 2013; Volume 8614. [Google Scholar]
- Melamud, R.; Kim, B.; Chandorkar, S.A.; Hopcroft, M.A.; Agarwal, M.; Jha, C.M.; Kenny, T.W. Temperature-compensated high-stability silicon resonators. Appl. Phys. Lett. 2007, 90, 244107. [Google Scholar] [CrossRef]
- Thakar, V.A.; Wu, Z.; Figueroa, C.; Rais-Zadeh, M. A temperature-stable clock using multiple temperature-compensated micro-resonators. In Proceedings of the IEEE International Frequency Control Symposium (IFCS), Taipei, Taiwan, 19–22 May 2014; pp. 1–4. [Google Scholar]
- Nguyen, C.T.-C. Micromechanical resonators for oscillators and filters. In Proceedings of the International Ultrasonics Symposium, Seattle, WA, USA, 7–10 November 1995; pp. 489–499. [Google Scholar]
- Serrano, D.E.; Tabrizian, R.; Ayazi, F. Tunable piezoelectric MEMS resonators for real-time clock. In Proceedings of the IEEE International Frequency Control Symposium and the European Frequency and Time Forum (IFCS/EFTF), San Francisco, CA, USA, 2–5 May 2011; pp. 1–4. [Google Scholar]
- Nguyen, C.T.-C. Frequency-selective MEMS for miniaturized low-power communication devices. IEEE Trans. Microw. Theory Tech. 1999, 47, 1486–1503. [Google Scholar] [CrossRef] [Green Version]
- Perrott, M.H.; Salvia, J.C.; Lee, F.S.; Partridge, A.; Mukherjee, S.; Arft, C.; Jintae, K.; Arumugam, N.; Gupta, P.; Tabatabaei, S.; et al. A temperature-to-digital converter for a MEMS-based programmable oscillator with <±0.5-ppm frequency stability and <1-ps integrated jitter. IEEE J. Solid State Circuits 2013, 48, 276–291. [Google Scholar] [CrossRef]
- Villanueva, L.G.; Kenig, E.; Karabalin, R.B.; Matheny, M.H.; Lifshitz, R.; Cross, M.C.; Roukes, M.L. Surpassing fundamental limits of oscillators using nonlinear resonators. Phys. Rev. Lett. 2013, 110, 177208. [Google Scholar] [CrossRef] [PubMed]
- Villanueva, L.G.; Karabalin, R.B.; Matheny, M.H.; Kenig, E.; Cross, M.C.; Roukes, M.L. A nanoscale parametric feedback oscillator. Nano Lett. 2011, 11, 5054–5059. [Google Scholar] [CrossRef] [PubMed]
- Islam, M.S.; Lee, J.; Wei, R.; Feng, P.X.-L.; Mandal, S.M. Programmable & reconfigurable sustaining amplifiers for MEMS/NEMS referenced multimode oscillators. In Proceedings of the Techical Digest of the 18th Solid-State Sensors, Open Poster WOP-12, Actuators & Microsystems Workshop (Hilton Head 2018), Hilton Head Island, SC, USA, 3–7 June 2018. [Google Scholar]
- Lee, J.; Kaul, A.B.; Feng, P.X.-L. Carbon nanofiber high frequency nanomechanical resonators. Nanoscale 2017, 9, 11864–11870. [Google Scholar] [CrossRef] [PubMed]
- McCandless, J.P.; Lee, J.; Kuo, H.I.; Pashaei, V.; Mehregany, M.; Zorman, C.A.; Feng, P.X.-L. Electrical and optical transduction of single-crystal 3C-SiC comb-drive resonators in SiC-on-Insulator (SiCOI) Technology. In Proceedings of the Techical Digest of the 17th Solid-State Sensors, Actuators & Microsystems Workshop (Hilton Head 2016), Hilton Head Island, SC, USA, 5–9 June 2016; pp. 9–12. [Google Scholar]
- Islam, M.S.; Singh, S.K.; Mandal, S. A programmable sustaining amplifier for reconfigurable MEMS-referenced oscillators. In Proceedings of the IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 41–44. [Google Scholar]
- Sarpeshkar, R.; Lyon, R.F.; Mead, C.A. A low-power wide-linear-range transconductance amplifier. Analog Integr. Circuits Signal Process. 1997, 13, 123–151. [Google Scholar] [CrossRef]
- Feng, X.-L.; White, C.J.; Hajimiri, A.; Roukes, M.L. A self-sustaining ultrahigh-frequency nanoelectromechanical oscillator. Nat. Nanotechnol. 2008, 3, 342–346. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Allan, D.W. Time and frequency (time-domain) characterization, estimation, and prediction of precision clocks and oscillators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1987, 34, 647–654. [Google Scholar] [CrossRef] [PubMed]
- Antonio, D.; Zanette, D.H.; López, D. Frequency stabilization in nonlinear micromechanical oscillators. Nat. Commun. 2012, 3, 806. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Young, D.J.; Pehlivanoǧlu, I.E.; Zorman, C.A. Silicon carbide MEMS-resonator-based oscillator. J. Micromech. Microeng. 2009, 19, 115027. [Google Scholar] [CrossRef]
- Zaliasl, S.; Salvia, J.C.; Hill, G.C.; Chen, L.W.; Joo, K.; Palwai, R.; Arumugam, N.; Phadke, M.; Mukherjee, S.; Lee, H.C.; et al. A 3 ppm 1.5 × 0.8 mm2 1.0 μA 32.768 kHz MEMS-based oscillator. IEEE J. Solid State Circuits 2015, 50, 291–302. [Google Scholar] [CrossRef]
- Zhang, Y.; Moser, J.; Güttinger, J.; Bachtold, A.; Dykman, M.I. Interplay of driving and frequency noise in the spectra of vibrational systems. Phys. Rev. Lett. 2014, 113, 255502. [Google Scholar] [CrossRef] [PubMed]
- Steele, G.A.; Hüttel, A.K.; Witkamp, B.; Poot, M.; Meerwaldt, H.B.; Kouwenhoven, L.P.; van der Zant, H.S.J. Strong coupling between single-electron tunneling and nanomechanical motion. Science 2009, 325, 1103–1107. [Google Scholar] [CrossRef] [PubMed]
- Miao, T.; Yeom, S.; Wang, P.; Standley, B.; Bockrath, M. Graphene nanoelectromechanical systems as stochastic-frequency oscillators. Nano Lett. 2014, 14, 2982–2987. [Google Scholar] [CrossRef] [PubMed]
- Sansa, M.; Sage, E.; Bullard, E.C.; Gély, M.; Alava, T.; Colinet, E.; Naik, A.K.; Villanueva, L.G.; Duraffourg, L.; Roukes, M.L.; et al. Frequency fluctuations in silicon nanoresonators. Nat. Nanotechnol. 2016, 11, 552–558. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, C.L.; Chang, F.R.; Tu, K.Y. Highly accurate real-time GPS carrier phase-disciplined oscillator. IEEE Trans. Instrum. Meas. 2005, 54, 819–824. [Google Scholar] [CrossRef] [Green Version]
- Lombardi, M.A. The use of GPS disciplined oscillators as primary frequency standards for calibration and metrology laboratories. J. Meas. Sci. 2008, 3, 56–65. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chip Components | Performance |
|---|---|
| Low-Noise Amplifier (LNA) (for IB = 2.5 µA) | Gain: 12 dB; Bandwidth: ~1 MHz Thermal Noise PSD: 13 nV/Hz1/2 1/f Corner Frequency: <10 kHz |
| Band-Pass Filter (BPF) | Center Frequency (f0): 2–90 kHz; Q: 1–8 Dynamic Range (DR): 60.7 dB (24 kHz, Q = 2) Linear Range: 500 mV (THD < 5%, 24 kHz, Q = 2) |
| All-Pass Filter (APF) | Phase Control: 0–360° Phase Control Sensitivity: ~0.6°/nA |
| Variable Gain Amplifier (VGA) | Settable Gain: 0–80 dB |
| Automatic Level Control (ALC) | Amplitude Control Voltage (VED): 0–0.5 V ED Time Constant: 8-Bit control |
| Background Compensation Path | Gain Control: −20 to 40 dB Phase Control: 0–180° |
| Day # | Fitted Coefficients | |
|---|---|---|
| m | c | |
| 1 | −1.022 | 27,035 |
| 2 | −1.169 | 26,964 |
| 3 | −1.459 | 27,067 |
| 4 | −1.128 | 26,997 |
| 5 | −1.1329 | 27,044 |
| 6 | −1.1458 | 26,968 |
| Mean value | −1.1761 | 27,012 |
| Properties | This Work | [28] | [29] | [3] |
|---|---|---|---|---|
| Resonator Type and Material | Single-Crystal SOI Lateral Comb-Drive | 3C-SiC, Comb-Drive | Capacitive Transduction H-Shaped Tuning Fork | Poly-Si Two-Port, Folded-Beam, Comb-Drive |
| Modes of Oscillation | 3 | 3 | 1 | 1 |
| Oscillation Frequencies (fosc) | ~27.0 kHz (Mode 1 Only) | 27.1 kHz, 30.3 kHz, 24.2 kHz | 32.768 kHz | 16.5 kHz |
| Q-Factor | 13,000 | 13,550,10,300 and 9480 | 52,000 | 23,400 |
| CMOS Sustaining Amplifier Chip | 0.5 μm CMOS | Discrete Components | 180 nm CMOS | CMOS Transimpedance Amplifier (TIA) |
| Die Size | 1.5 mm × 1.5 mm | Discrete Components | 1.55 mm × 0.85 mm | 420 µm × 320 µm (Resonator Only) |
| Supply Voltage (VDD) | 3.3 V | 3.0 V | 1.4–4.5 V | 2.5 V |
| SSB Phase Noise | −65 dBc/Hz @ 10 Hz Offset | −78 dBc/Hz @ 12 Hz Offset | Not Reported | −72 dBc/Hz @ 1 kHz Offset (Simulated) |
| FoM * | 133.61 | Not Reported | Not Reported | Not Reported |
| Startup Time | ~600 µs | Not Reported | 0.2 s | Not Reported |
| Real-Time Temperature Compensation | Yes | No | Yes | No |
| Temperature coeficients of frequency (TCf) | −34 ppm/°C (MEMS only); <±3 ppm (TCO) over 11.2 °C to +41.2 °C | 24.75 ppm /°C ** (rocking vibration mode of MEMS) over 26.85 °C to +426.85 °C | ±100 ppm (MEMS only); ±3 ppm (TCXO) & 100 ppm max (XO) over −40 °C to +85 °C | −10 ppm/°C (MEMS only) over 26.85 °C to +96.85 °C |
| Year | 2018 | 2009 | 2015 | 1999 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, M.S.; Wei, R.; Lee, J.; Xie, Y.; Mandal, S.; Feng, P.X.-L. A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip. Micromachines 2018, 9, 559. https://doi.org/10.3390/mi9110559
Islam MS, Wei R, Lee J, Xie Y, Mandal S, Feng PX-L. A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip. Micromachines. 2018; 9(11):559. https://doi.org/10.3390/mi9110559
Chicago/Turabian StyleIslam, Mohammad S., Ran Wei, Jaesung Lee, Yong Xie, Soumyajit Mandal, and Philip X.-L. Feng. 2018. "A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip" Micromachines 9, no. 11: 559. https://doi.org/10.3390/mi9110559
APA StyleIslam, M. S., Wei, R., Lee, J., Xie, Y., Mandal, S., & Feng, P. X. -L. (2018). A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip. Micromachines, 9(11), 559. https://doi.org/10.3390/mi9110559