Experimental Research on Fluid Coupling Flexible Actuator


Abstract
:1. Introduction
2. Actuator and Its Working Principles
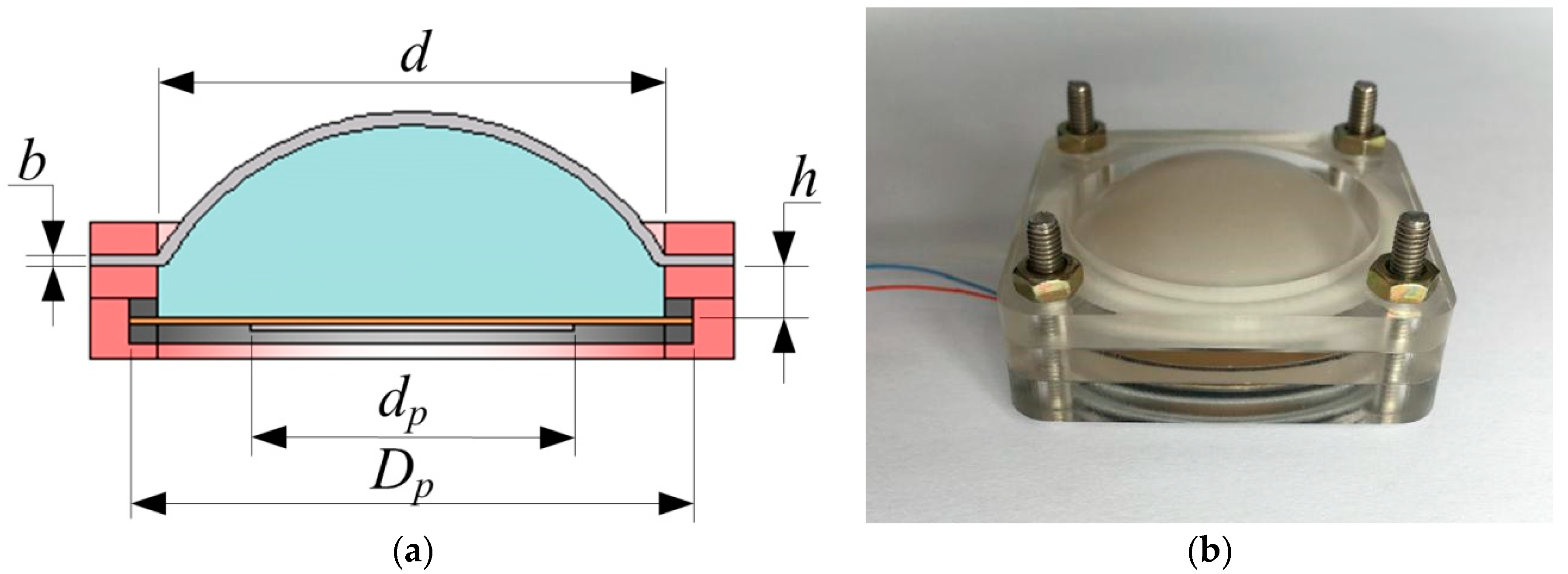
2.1. The Structure of the Actuator
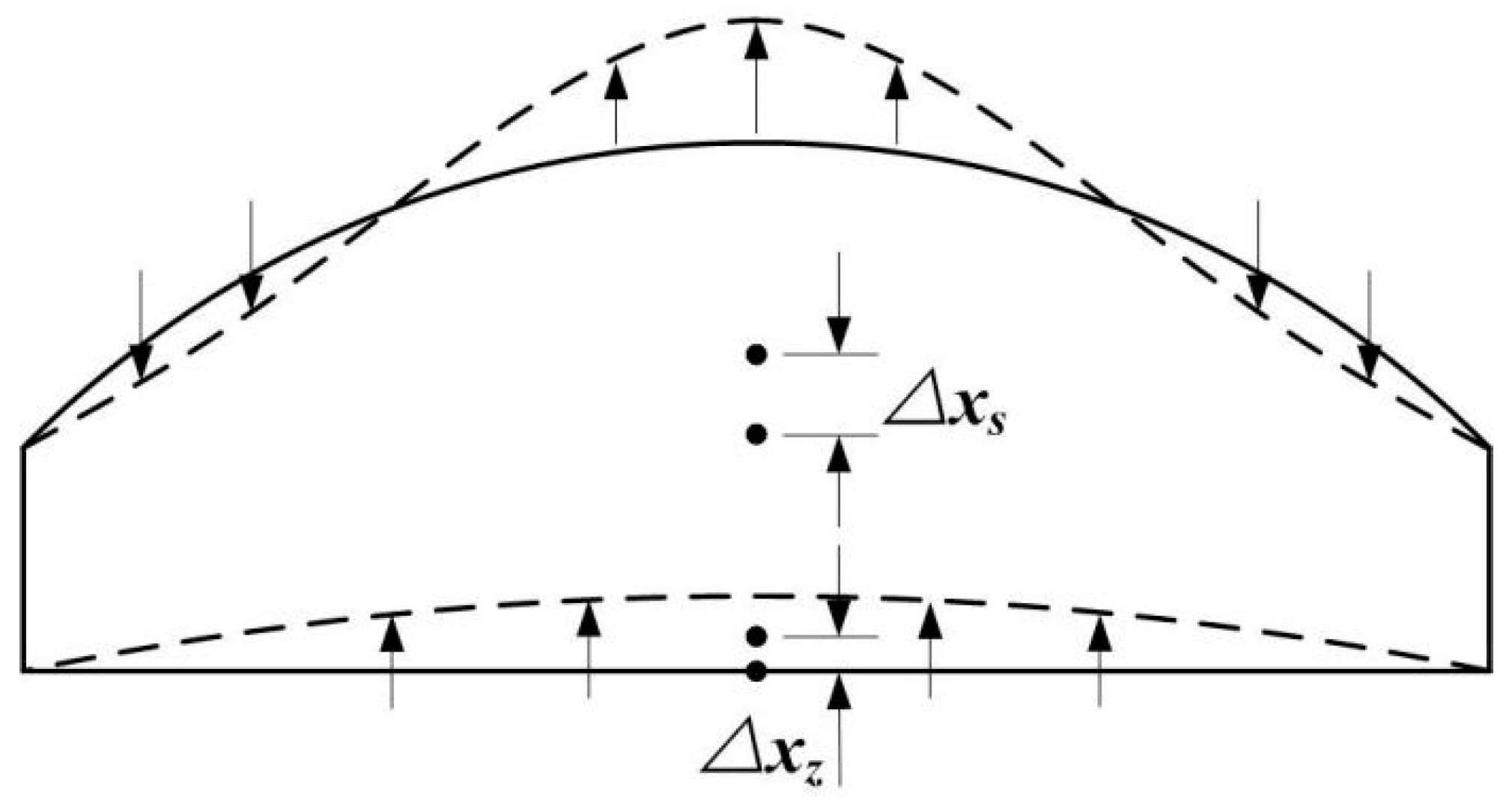
2.2. Working Principle
3. Mathematical Formulation
4. The Experimental Test and Discussion
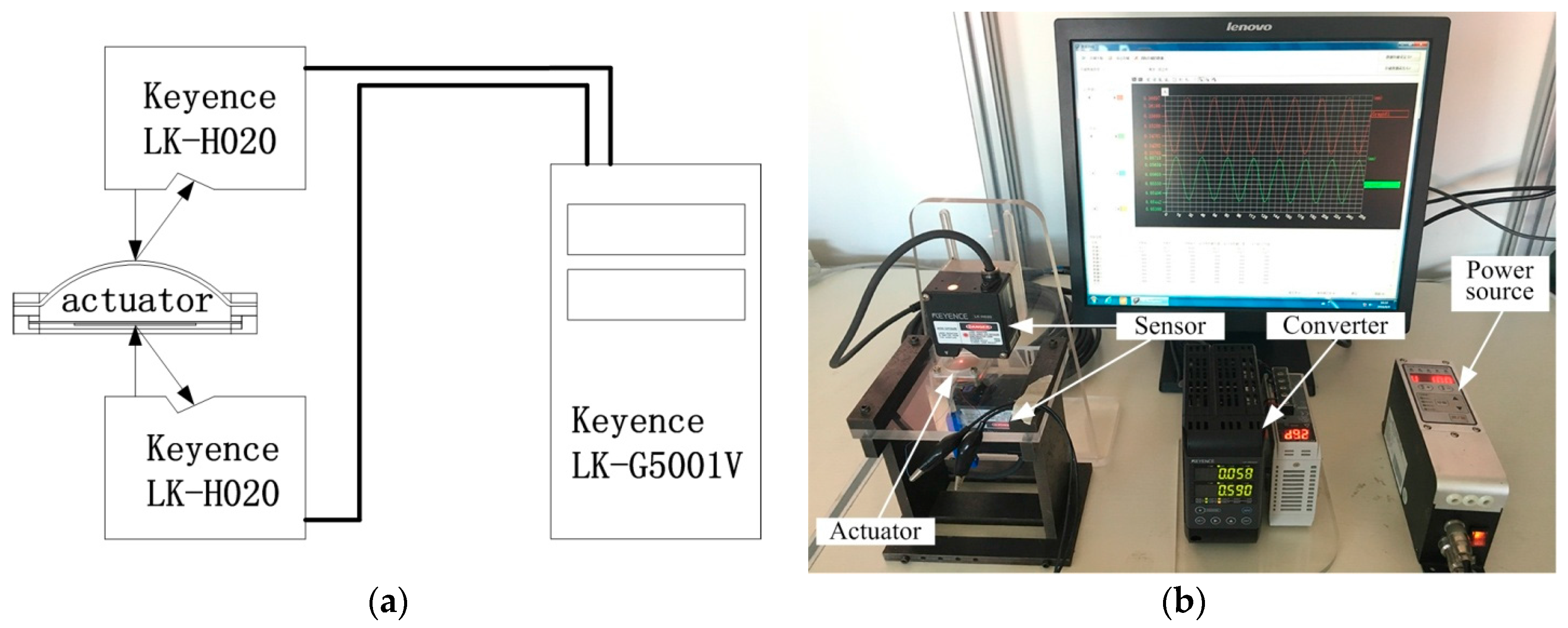
4.1. Experimental Apparatus and Test Methods
4.2. The Fluid Mass
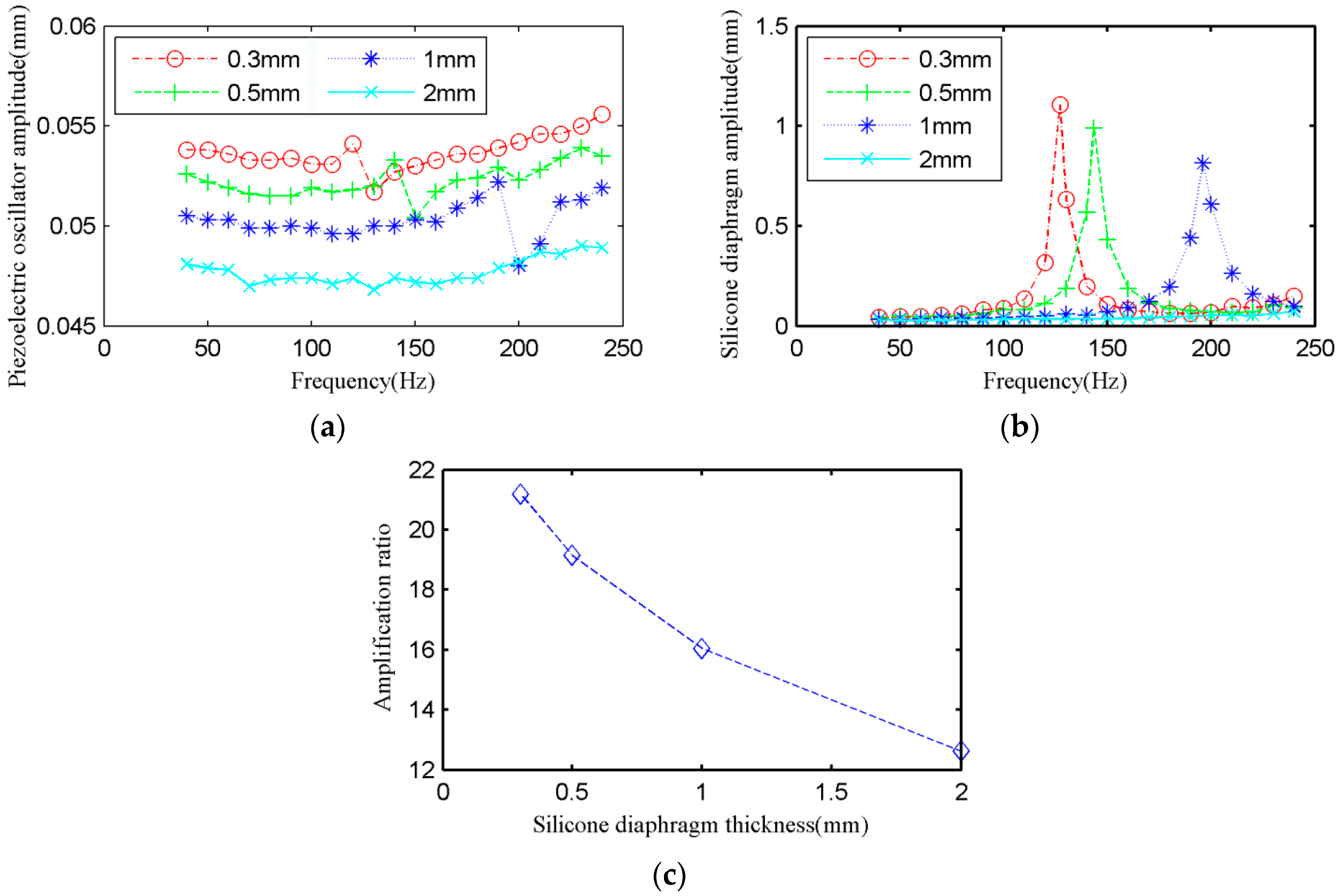
4.3. The Thickness of the Silicone Diaphragm
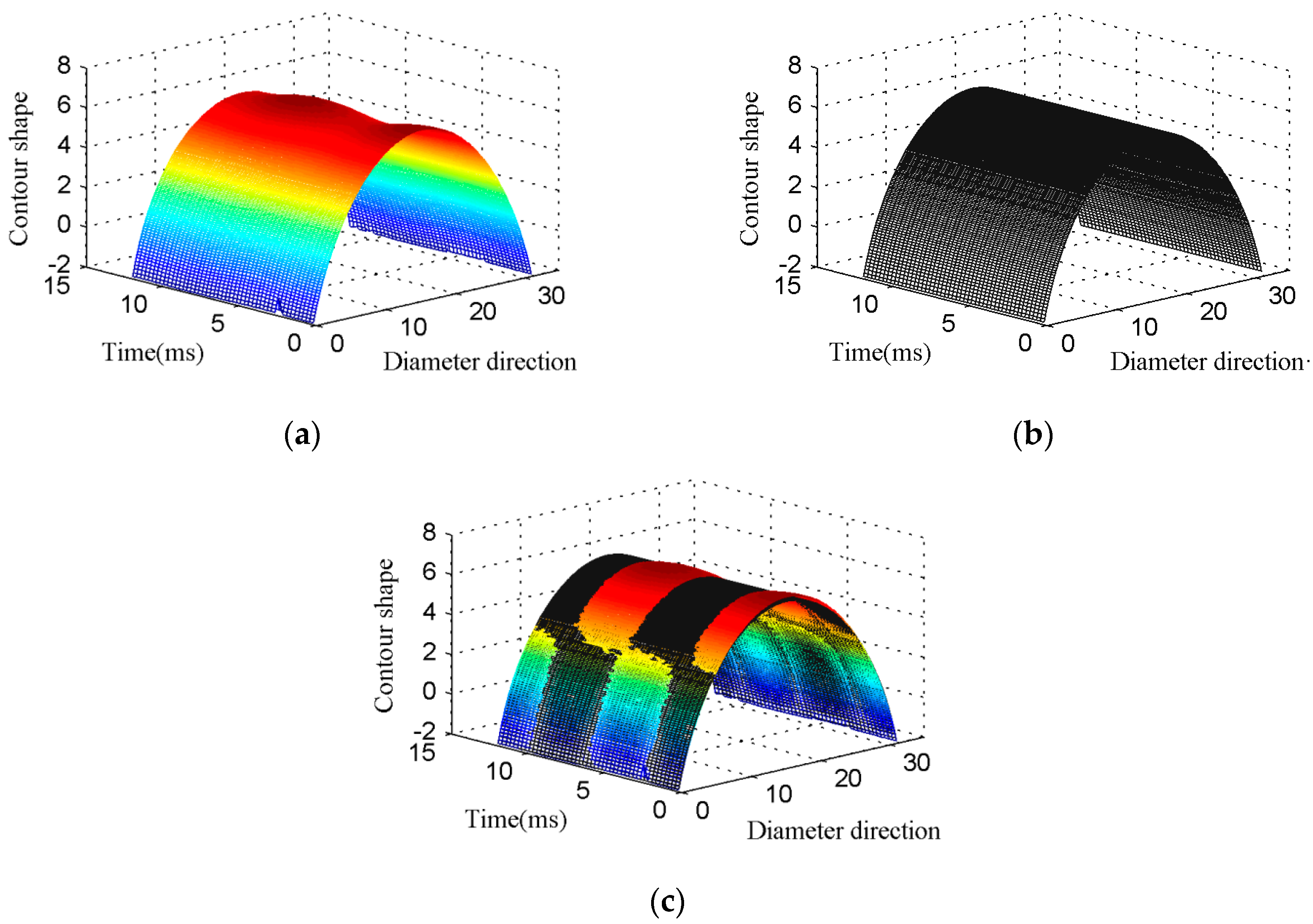
4.4. Experimental Verification
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- De Rossi, D.; Carpi, F.; Carbonaro, N.; Tognetti, A.; Scilingo, E.P. Electroactive polymer patches for wearable haptic interfaces. In Proceedings of the Engineering in Medicine and Biology Society, EMBC, 2011 Annual International Conference of the IEEE, Boston, MA, USA, 30 Augurst–3 September 2011; pp. 8369–8372. [Google Scholar]
- Wu, X.; Kim, S.H.; Ji, C.H.; Allen, M.G. A solid hydraulically amplified piezoelectric microvalve. J. Micromech. Microeng. 2011, 21, 095003. [Google Scholar] [CrossRef]
- Wu, Y.; Dong, J.; Li, X.; Yang, Z.; Liu, Q. Non-linear piezoelectric actuator with a preloaded cantilever beam. Micromachines 2015, 6, 1066–1081. [Google Scholar] [CrossRef]
- Liang, C.; Wang, F.; Tian, Y.; Zhao, X.; Zhang, H.; Cui, L.; Zhang, D.; Ferreira, P. A novel monolithic piezoelectric actuated flexure-mechanism based wire clamp for microelectronic device packaging. Rev. Sci. Instrum. 2015, 86, 045106. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; He, Z.; Li, D.; Cui, X.; Xue, G.; Zhao, Z. Dynamic analysis and application of a novel hydraulic displacement amplifier based on flexible pistons for micro stage actuator. Sens. Actuators A Phys. 2015, 236, 228–246. [Google Scholar] [CrossRef]
- Yoon, H.S.; Washington, G.; Eyabi, P.; Radhamohan, M.; Woodard, S.W.; Dayton, R. A millimeter-stroke piezoelectric hybrid actuator using hydraulic displacement amplification mechanism. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; pp. 2809–2813. [Google Scholar]
- Yang, Z.; He, Z.; Li, D.; Xue, G.; Cui, X. Hydraulic amplifier design and its application to direct drive valve based on magnetostrictive actuator. Sens. Actuators A Phys. 2014, 216, 52–63. [Google Scholar] [CrossRef]
- Roberts, D.C.; Li, H.; Steyn, J.L.; Yaglioglu, O.; Spearing, S.M.; Schmidt, M.A.; Hagood, N.W. A piezoelectric microvalve for compact high-frequency, high-differential pressure hydraulic micropumping systems. J. Microelectromech. Syst. 2003, 12, 81–92. [Google Scholar] [CrossRef]
- Carpi, F.; Frediani, G.; Tarantino, S.; De Rossi, D. Millimeter-scale bubble-like dielectric elastomer actuators. Polym. Int. 2010, 59, 407–414. [Google Scholar] [CrossRef]
- Carpi, F.; Frediani, G.; De Rossi, D. Hydrostatically coupled dielectric elastomer actuators. IEEE/ASME Trans. Mechatron. 2010, 15, 308–315. [Google Scholar] [CrossRef]
- Ninomiya, T.; Okayama, Y.; Matsumoto, Y.; Arouette, X.; Osawa, K.; Miki, N. MEMS-based hydraulic displacement amplification mechanism with completely encapsulated liquid. Sens. Actuators A Phys. 2011, 166, 277–282. [Google Scholar] [CrossRef]
- Moiseyev, N.N.; Rumyantsev, V.V. Dynamic Stability of Bodies Containing Fluid; Springer Science + Business Media: Heidelberg, Germany, 2012. [Google Scholar]
- Xue, J.; Lang, H. Numerical simulation of thin film vibration. J. Northwest Norm. Univ. Nat. Sci. 1995, 4, 103–107. [Google Scholar]
- Lin, W.; Chen, S.; Li, S. Theoretical solution of free vibration of circular thin films. Vib. Shock 2009, 28, 84–86. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Chamber diameter | d | 31.5 mm |
| Chamber height | h | 4 mm |
| Piezoelectric oscillator substrate diameter | Dp | 35 mm |
| Piezoelectric oscillator ceramic diameter | dp | 25 mm |
| Driving voltage | U | 100 V |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, X.; Wu, Y.; Tu, Q.; Dong, J.; Yang, Z.; Li, X. Experimental Research on Fluid Coupling Flexible Actuator. Micromachines 2018, 9, 103. https://doi.org/10.3390/mi9030103
Zeng X, Wu Y, Tu Q, Dong J, Yang Z, Li X. Experimental Research on Fluid Coupling Flexible Actuator. Micromachines. 2018; 9(3):103. https://doi.org/10.3390/mi9030103
Chicago/Turabian StyleZeng, Xiangli, Yue Wu, Qianjin Tu, Jingshi Dong, Zhigang Yang, and Xinbo Li. 2018. "Experimental Research on Fluid Coupling Flexible Actuator" Micromachines 9, no. 3: 103. https://doi.org/10.3390/mi9030103
APA StyleZeng, X., Wu, Y., Tu, Q., Dong, J., Yang, Z., & Li, X. (2018). Experimental Research on Fluid Coupling Flexible Actuator. Micromachines, 9(3), 103. https://doi.org/10.3390/mi9030103