A Microfluidic Chip with Double-Slit Arrays for Enhanced Capture of Single Cells

 , ,
, ,
Abstract
:1. Introduction
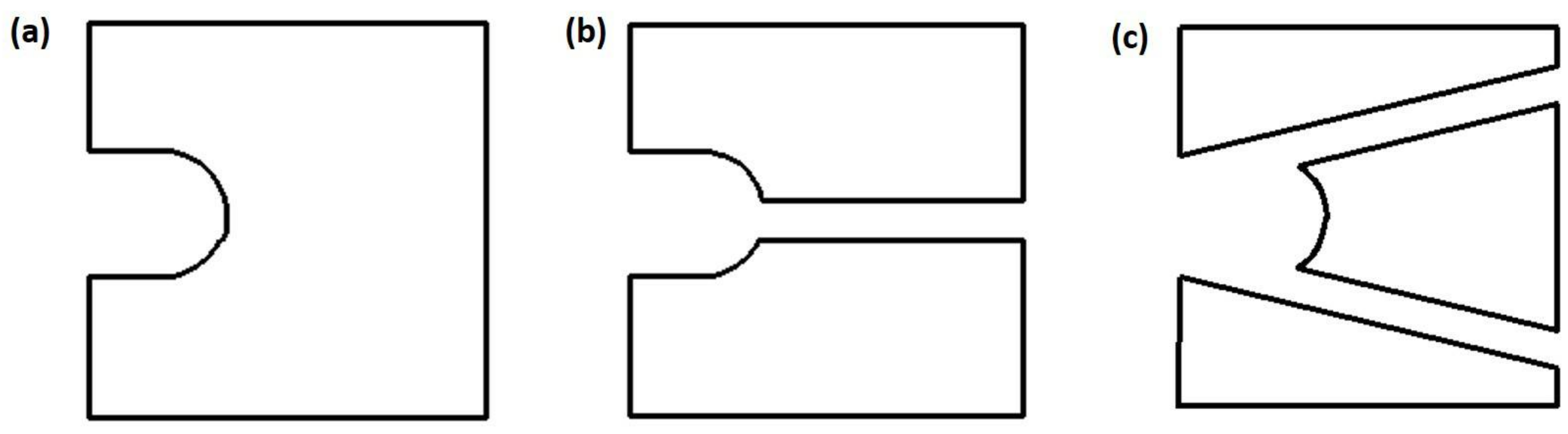
2. Problem Formation
3. Materials and Methods
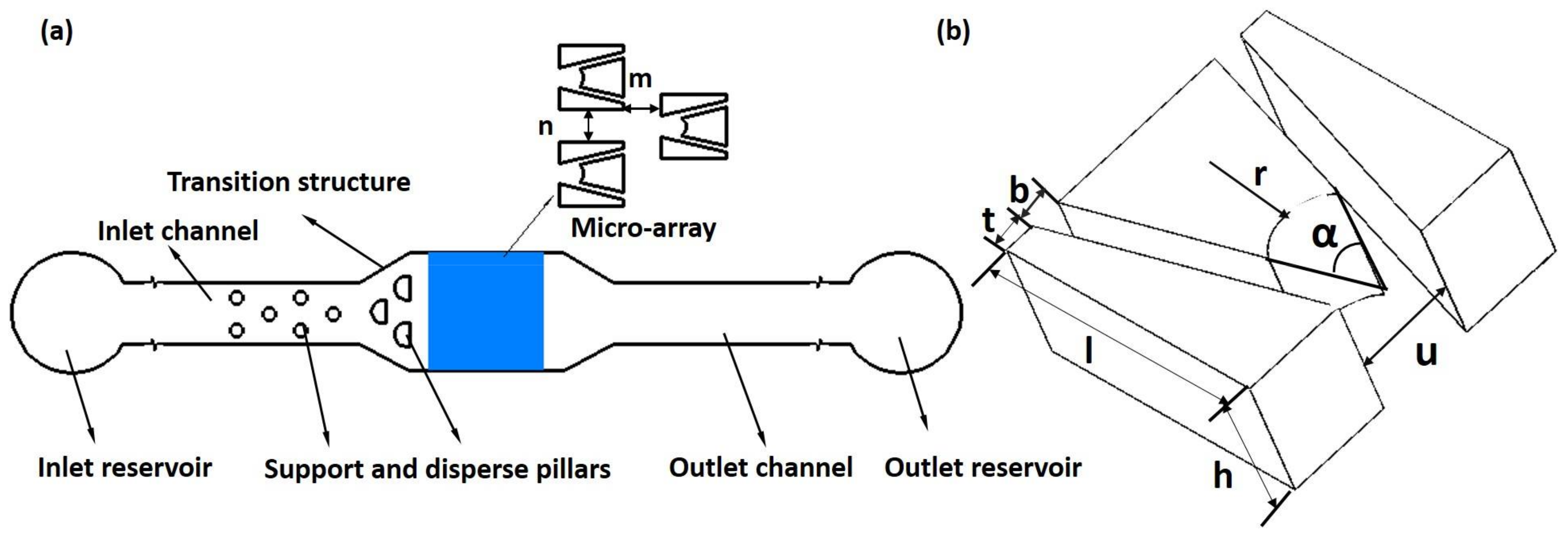
3.1. Design and Fabrication of the Microfluidic Chip
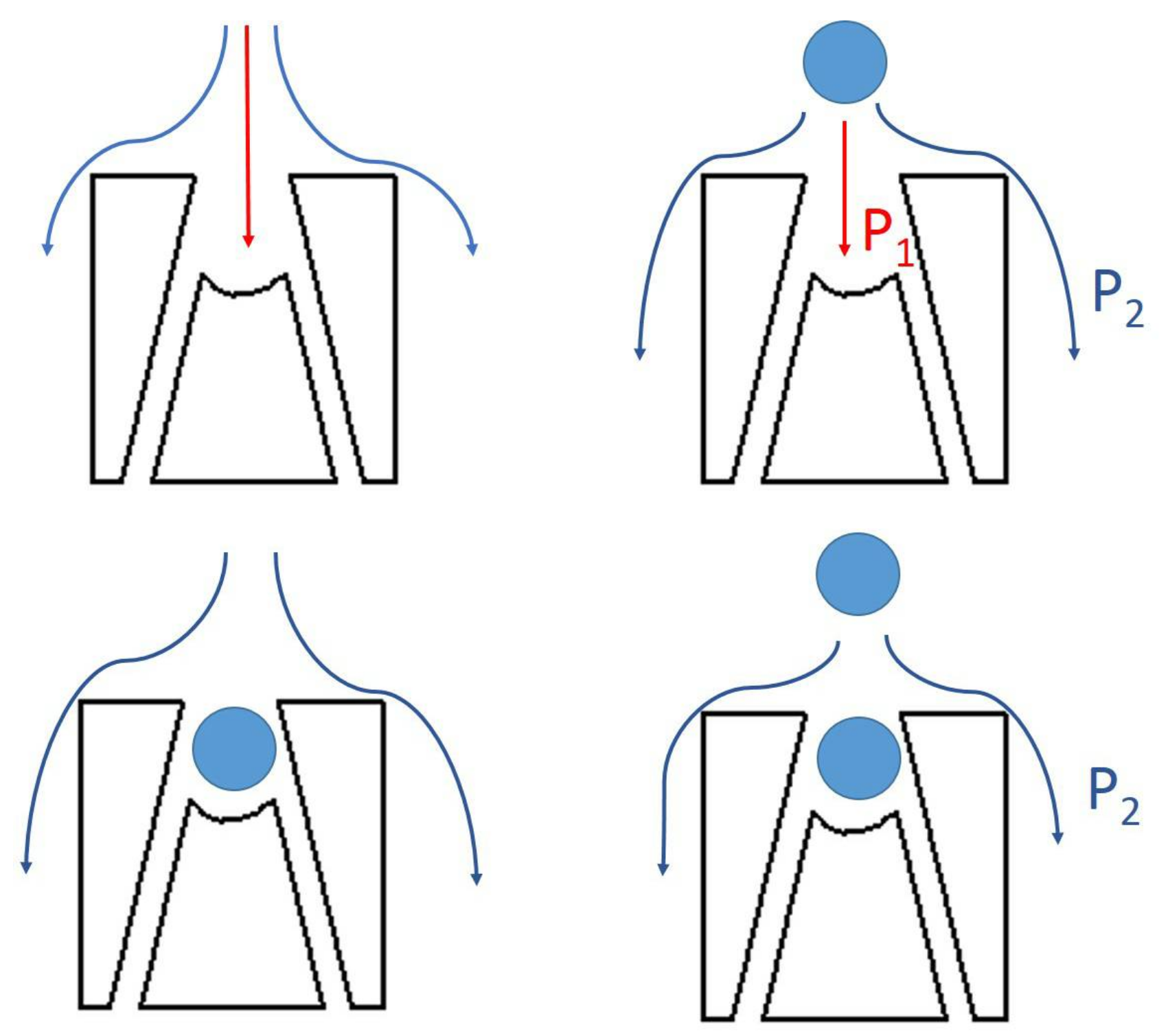
3.2. Computational Models and Trapping Mechanism
3.3. Materials and Cell Preparation
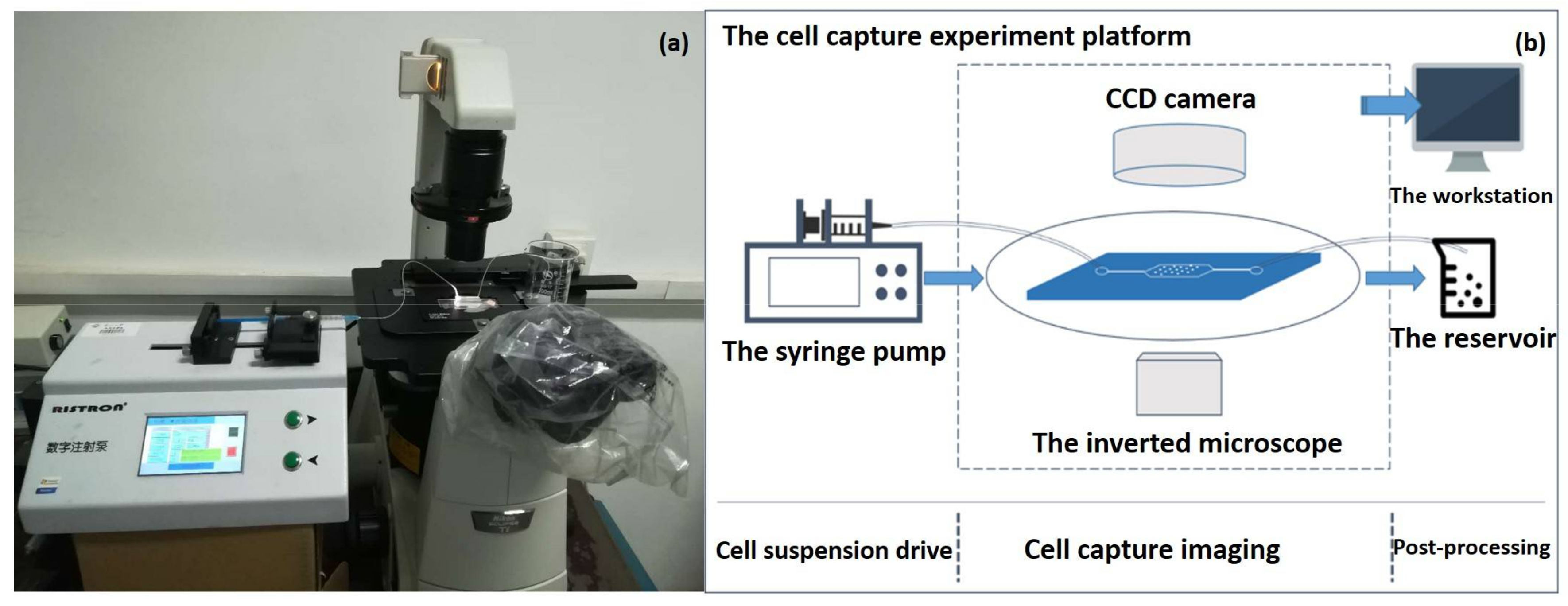
3.4. Microsphere and Cell Manipulation
4. Results and Discussion
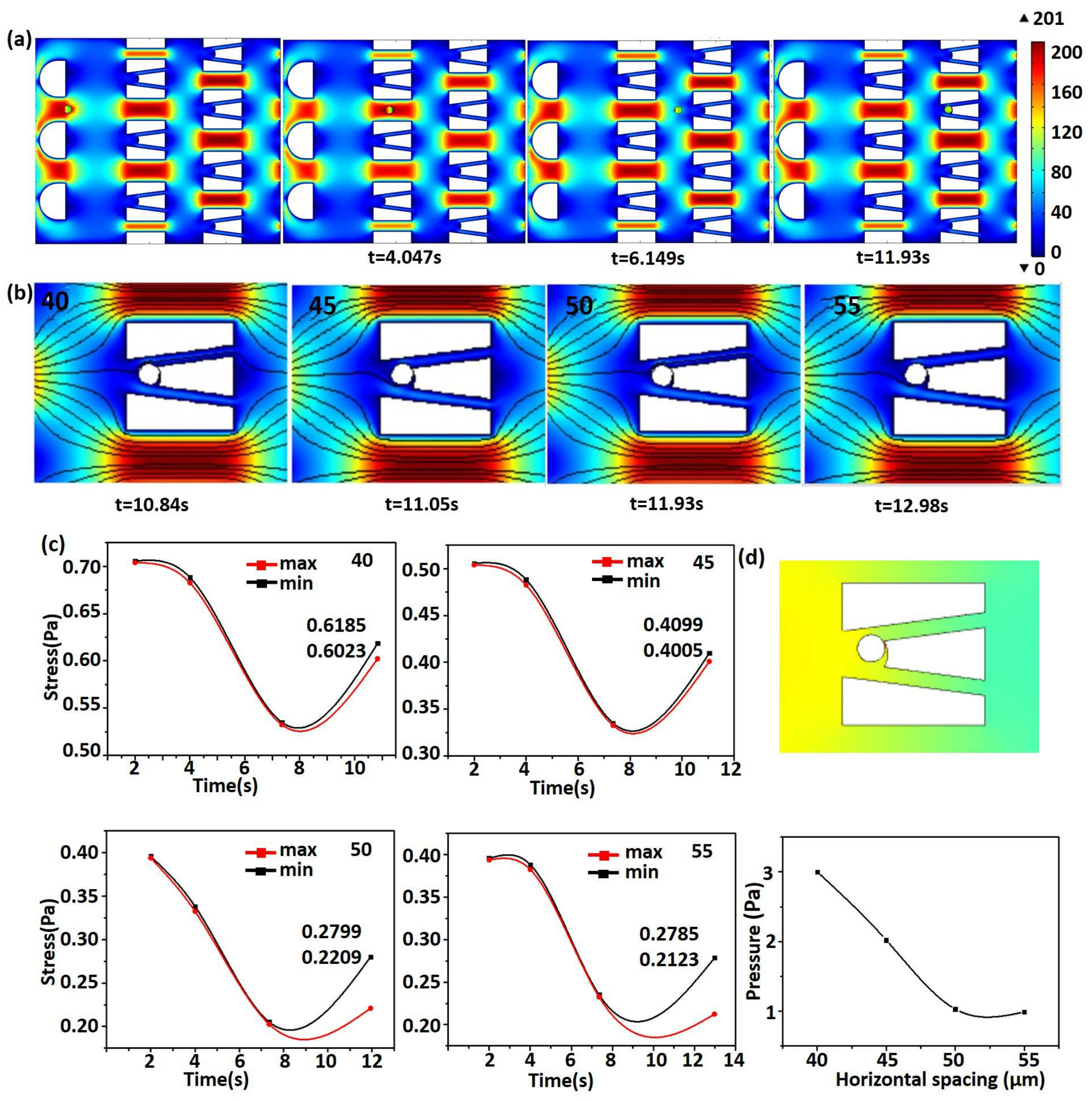
4.1. The Optimization of Micro-Trap Spacing
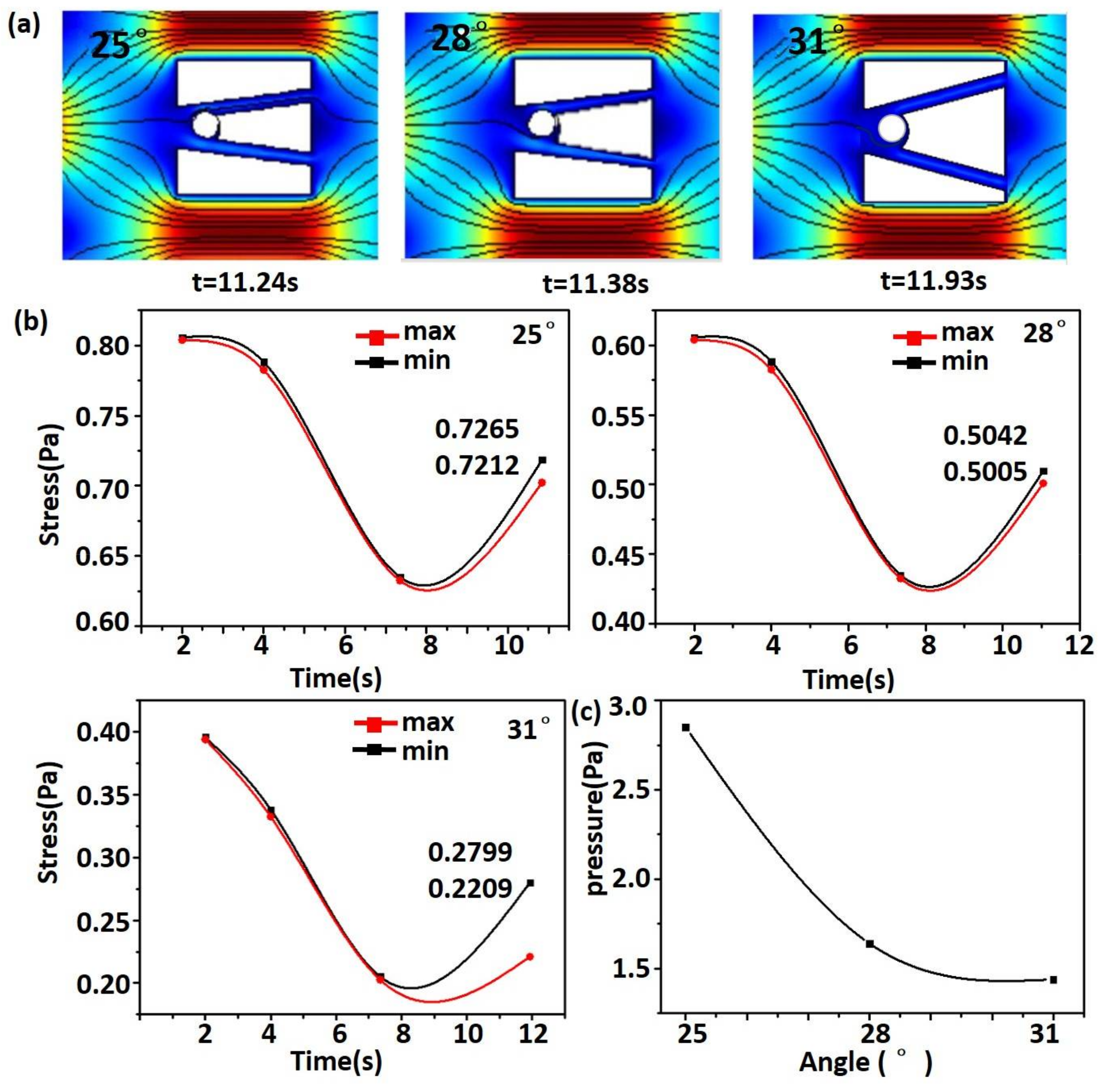
4.2. The Optimization of the Opening Angle
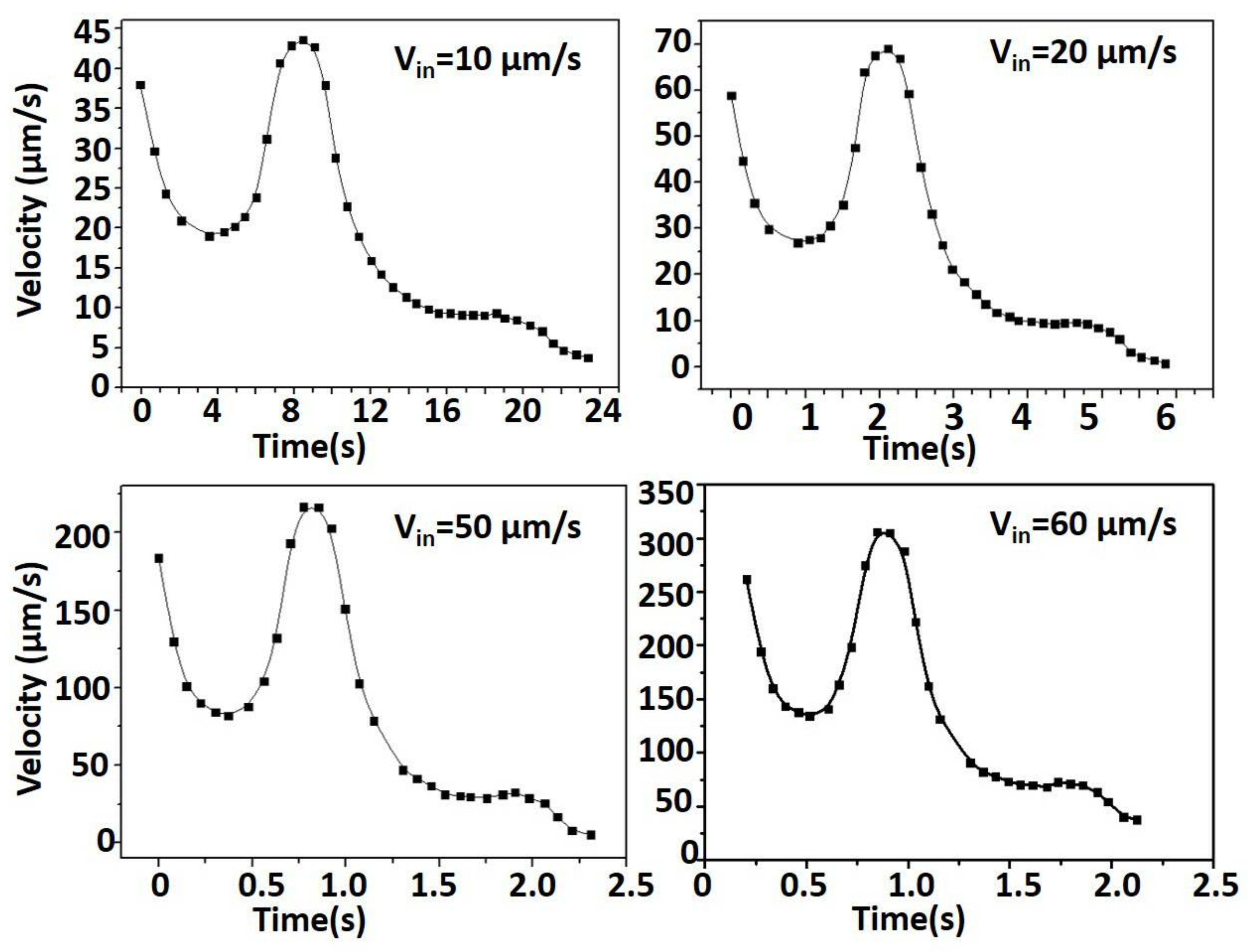
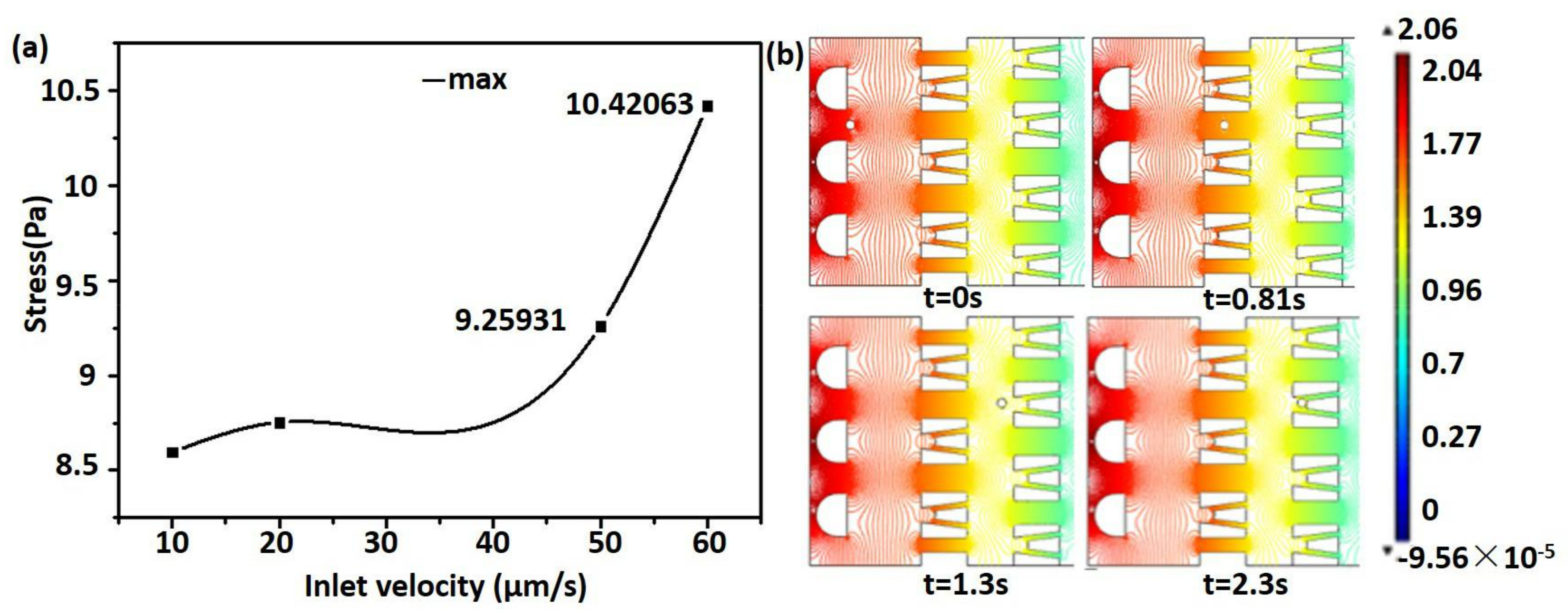
4.3. Fluid Velocity Distribution
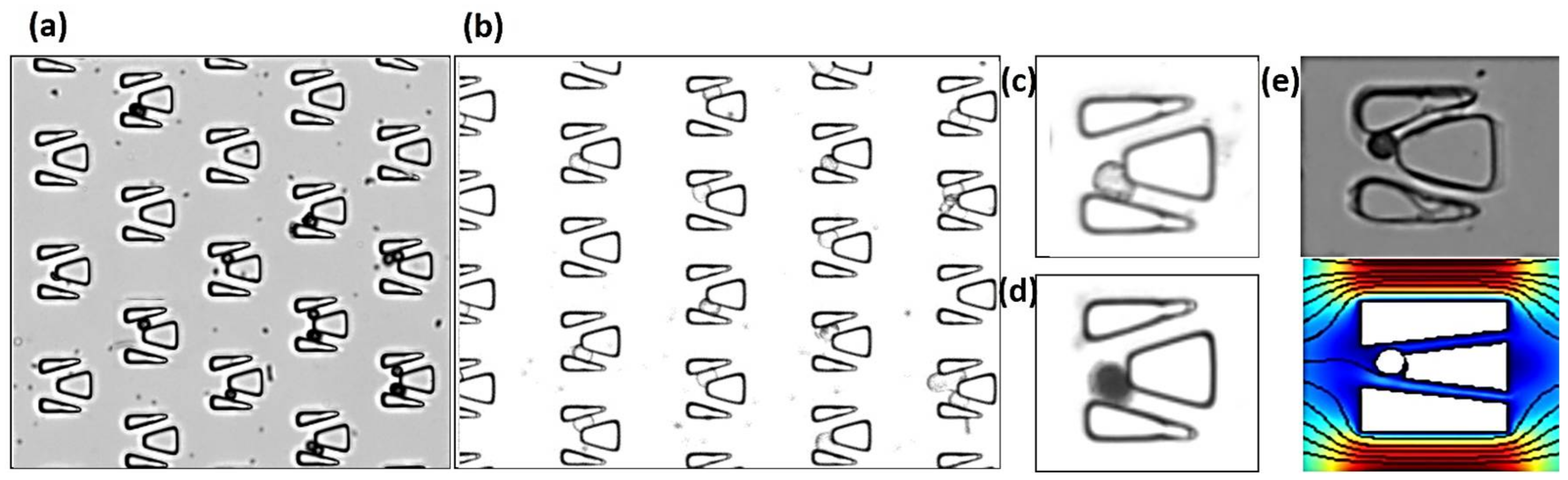
4.4. Cell-Trap and Drug Delivery in the Microfluidic Chip
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

References
- Whitesides, G.M. The origins and the future of microfluidics. Nature 2006, 442, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Sackmann, E.K.; Fulton, A.L.; Beebe, D.J. The present and future role of microfluidics in biomedical research. Nature 2014, 507, 181–189. [Google Scholar] [CrossRef] [PubMed]
- Lerchner, J.; Wolf, A.; Wolf, G.; Baier, V.; Kessler, E.; Nietzsch, M.; Krügel, M. A new micro-fluid chip calorimeter for biochemical applications. Thermochim. Acta 2006, 445, 144–150. [Google Scholar] [CrossRef]
- Velve-Casquillas, G.; Le Berre, M.; Piel, M.; Tran, P.T. Microfluidic tools for cell biological research. Nano Today 2009, 5, 28–47. [Google Scholar] [CrossRef] [PubMed]
- Walling, M.A.; Shepard, J.R.E. Cellular heterogeneity and live cell arrays. Chem. Soc. Rev. 2011, 40, 4049–4076. [Google Scholar] [CrossRef] [PubMed]
- Klepárník, K.; Foret, F. Recent advances in the development of single cell analysis—A review. Anal. Chim. Acta 2013, 800, 12–21. [Google Scholar] [CrossRef] [PubMed]
- Lecault, V.; White, A.K.; Singhal, A.; Hansen, C.L. Microfluidic single cell analysis: From promise to practice. Curr. Opin. Chem. Biol. 2012, 16, 381–390. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.H.; Ai, F.; Wang, Z.L.; Cheng, J.K. Recent advances in single-cell analysis using capillary electrophoresis and microfluidic devices. J. Chromatogr. B 2008, 866, 104–122. [Google Scholar] [CrossRef] [PubMed]
- Sinclair, J.; Pihl, J.; Olofsson, J.; Karlsson, M.; Jardemark, K.; Chiu, D.T.; Orwar, O. A cell-based bar code reader for high-throughput screening of ion channel-ligand interactions. Anal. Chem. 2002, 74, 6133–6138. [Google Scholar] [CrossRef] [PubMed]
- Werner, M.; Merenda, F.; Piguet, J.; Salathé, R.P.; Vogel, H. Microfluidic array cytometer based on refractive optical tweezers for parallel trapping, imaging and sorting of individual cells. Lab Chip 2011, 11, 2432–2439. [Google Scholar] [CrossRef] [PubMed]
- Jin, D.; Deng, B.; Li, J.X.; Cai, W.; Tu, L.; Chen, J.; Wu, Q.; Wang, W.H. A microfluidic device enabling high-efficiency single cell trapping. Biomicrofluidics 2015, 9, 014101. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, J.; Evander, M.; Hammarström, B.; Laurell, T. Review of cell and particle trapping in microfluidic systems. Anal. Chim. Acta 2009, 649, 141–157. [Google Scholar] [CrossRef] [PubMed]
- Di Carlo, D.; Wu, L.Y.; Lee, L.P. Dynamic single cell culture array. Lab Chip 2006, 6, 1445–1449. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.Y.; Carlo, Di. D.; Lee, L.P. Microfluidic self-assembly of tumor spheroids for anticancer drug discovery. Biomed. Microdevices 2008, 10, 197–202. [Google Scholar] [CrossRef] [PubMed]
- Skelley, A.M.; Kirak, O.H.; Suh, H.; Jaenisch, R.; Voldman, J. Microfluidic control of cell pairing and fusion. Nat. Methods 2009, 6, 147–152. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Tang, X.; Feng, X.; Liu, C.; Chen, P.; Chen, D.; Liu, C. A microfluidic digital single-cell assay for the evaluation of anticancer drugs. Anal. Bioanal. Chem. 2015, 407, 1139–1148. [Google Scholar] [CrossRef] [PubMed]
- Yazdi, S.A.; Ardekani, M. Bacterial aggregation and biofilm formation in a vortical flow. Biomicrofluidics 2012, 6, 044114. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.B.; Huang, F.J.; Du, H.; Shu, W.L.; Feng, H.T.; Xu, X.P.; Chen, Y. Rapid isolation of cancer cells using microfluidic deterministic lateral displacement structure. Biomicrofluidics 2013, 7, 011801. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.S.; Liu, C.; Li, M.M.; Wang, J.D.; Xianyu, Y.L.; Hu, G.Q.; Jiang, X.Y. Size-based hydrodynamic rare tumor cell separation in curved microfluidic channels. Biomicrofluidics 2013, 7, 011802. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.X.; Sarder, P.Z.; Li, Y.; Nehorai, A. Optimization of microfluidic microsphere-trap arrays. Biomicrofluidics 2013, 7, 014112. [Google Scholar] [CrossRef] [PubMed]
- Hegab, H.M.; ElMekawy, A.; Stakenborg, T. Review of microfluidic micro-bioreactor technology for high-throughput submerged microbiological cultivation. Biomicrofluidics 2013, 7, 021502. [Google Scholar] [CrossRef] [PubMed]
- Shen, F.; Li, X.J.; Li, P.C.H. Study of flow behaviors on single-cell manipulation and shear stress reduction in microfluidic chips using computational fluid dynamics simulations. Biomicrofluidics 2014, 8, 014109. [Google Scholar] [CrossRef] [PubMed]
- Karimi, A.; Yazdi, S.; Ardekani, A.M. Hydrodynamic mechanisms of cell and particle trapping in microfluidics. Biomicrofluidics 2013, 7, 021501. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.L.; Liu, K.; Liu, C.B.; Wang, D.Y.; Ba, D.C.; Xie, Y.H.; Du, G.Y.; Ba, Y.S.; Lin, Q. Effects of surface tension and viscosity on the forming and transferring process of microscale droplets. Appl. Surf. Sci. 2016, 388, 196–202. [Google Scholar] [CrossRef]
- Liu, K.; Su, D.; Wang, D.Y.; Ba, D.C.; Wu, Z.Y.; Shang, J.Y.; Lin, Q. Simulation of coupled transport processes in single cell trapping on microfluidic chips. In Proceedings of the 5th International Coferrence of Colloid and Interface Science, Amasterdam, Holland, 21–24 June 2015. [Google Scholar]
- Faley, S.L.; Copland, M.; Wlodkowic, D.; Kolch, W.; Seale, K.T.; Wikswoe, J.P.; Cooper, J.M. Microfluidic single cell arrays to interrogate signalling dynamics of individual, patient-derived hematopoietic stem cells. Lab Chip 2009, 9, 2659–2664. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Jiang, Y.; Hao, M.; Chen, S.L.; Ning, Y.C.; Ning, J.X.; Ba, D.C. Study of cell-Trap microfluidic chip for platinum drugs treating cancer cell tests. In Proceedings of the 2017 IEEE 12th International Conference on Nano/Micro Engineered and Molecular Systems, NEMS, Los Angeles, CA, USA, 9–12 April 2017; pp. 689–693. [Google Scholar]
- Campbell, S.A. The Science and Engineering of Microelectronic Fabrication; Oxford University Press: New York, NY, USA, 2001; pp. 487–495. ISBN 978-01-9513-605-0. [Google Scholar]
- Tan, W.H.; Takeuchi, S. A trap-and-release integrated microfluidic system for dynamic microarray applications. Proc. Natl. Acad. Sci. USA 2007, 104, 1146–1151. [Google Scholar] [CrossRef] [PubMed]
- Kirby, B.J. Micro- and Nanoscale Fluid Mechanics: Transport in Microfluidic Devices; Cambridge University Press: London, UK, 2010; pp. 60–75. ISBN 978-05-2111-903-0. [Google Scholar]
- Bruus, H. Theoretical Microfluidics; Oxford University Press: New York, NY, USA, 2007; pp. 37–65. ISBN 978-01-9923-509-4. [Google Scholar]
- Tam, C.K.W.; Kurbatskii, K.A. Multi-size-mesh Multi-time-step Dispersion-relation-preserving Scheme for Multiple-scales Aeroacoustics Problems. Int. J. Comput. Fluid Dyn. 2003, 17, 119–132. [Google Scholar] [CrossRef]
- Eggleton, C.D.; Popel, A.S. Large deformation of red blood cell ghosts in a simple shear flow. Phys. Fluids 1998, 10, 1834–1845. [Google Scholar] [CrossRef] [PubMed]
- Jeong, J.H.; Sugii, Y.; Minamiyama, M.; Okamoto, K. Measurement of RBC deformation and velocity in capillaries in vivo. Microvasc. Res. 2006, 71, 212–217. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | r | h | l | t | b | u | α | m | n |
| Values (μm) | 7 | 15 | 50 | 4 | 5 | 16 | 25 | 40 | 20 |
| Parameters | r | h | l | t | b | u | α | m | n |
| Values (μm) | 7 | 15 | 50 | 4 | 5 | 16 | 28 | 50 | 25 |
| Number | Single | Double | More | Empty |
|---|---|---|---|---|
| Ratio (%) | 70 | 16 | 8 | 6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Chen, S.; Wang, D.; Jiang, Y.; Hao, M.; Du, G.; Ba, D.; Lin, Q.; Mei, Q.; Ning, Y.; et al. A Microfluidic Chip with Double-Slit Arrays for Enhanced Capture of Single Cells. Micromachines 2018, 9, 157. https://doi.org/10.3390/mi9040157
Xu J, Chen S, Wang D, Jiang Y, Hao M, Du G, Ba D, Lin Q, Mei Q, Ning Y, et al. A Microfluidic Chip with Double-Slit Arrays for Enhanced Capture of Single Cells. Micromachines. 2018; 9(4):157. https://doi.org/10.3390/mi9040157
Chicago/Turabian StyleXu, Jingyi, Shulei Chen, Dongyang Wang, Yue Jiang, Ming Hao, Guangyu Du, Dechun Ba, Qiao Lin, Qi Mei, Yingchao Ning, and et al. 2018. "A Microfluidic Chip with Double-Slit Arrays for Enhanced Capture of Single Cells" Micromachines 9, no. 4: 157. https://doi.org/10.3390/mi9040157
APA StyleXu, J., Chen, S., Wang, D., Jiang, Y., Hao, M., Du, G., Ba, D., Lin, Q., Mei, Q., Ning, Y., Su, D., & Liu, K. (2018). A Microfluidic Chip with Double-Slit Arrays for Enhanced Capture of Single Cells. Micromachines, 9(4), 157. https://doi.org/10.3390/mi9040157