Position-Space-Based Design of a Symmetric Spatial Translational Compliant Mechanism for Micro-/Nano-Manipulation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design of a Symmetric XYZ CPM
- (a)
- (b)
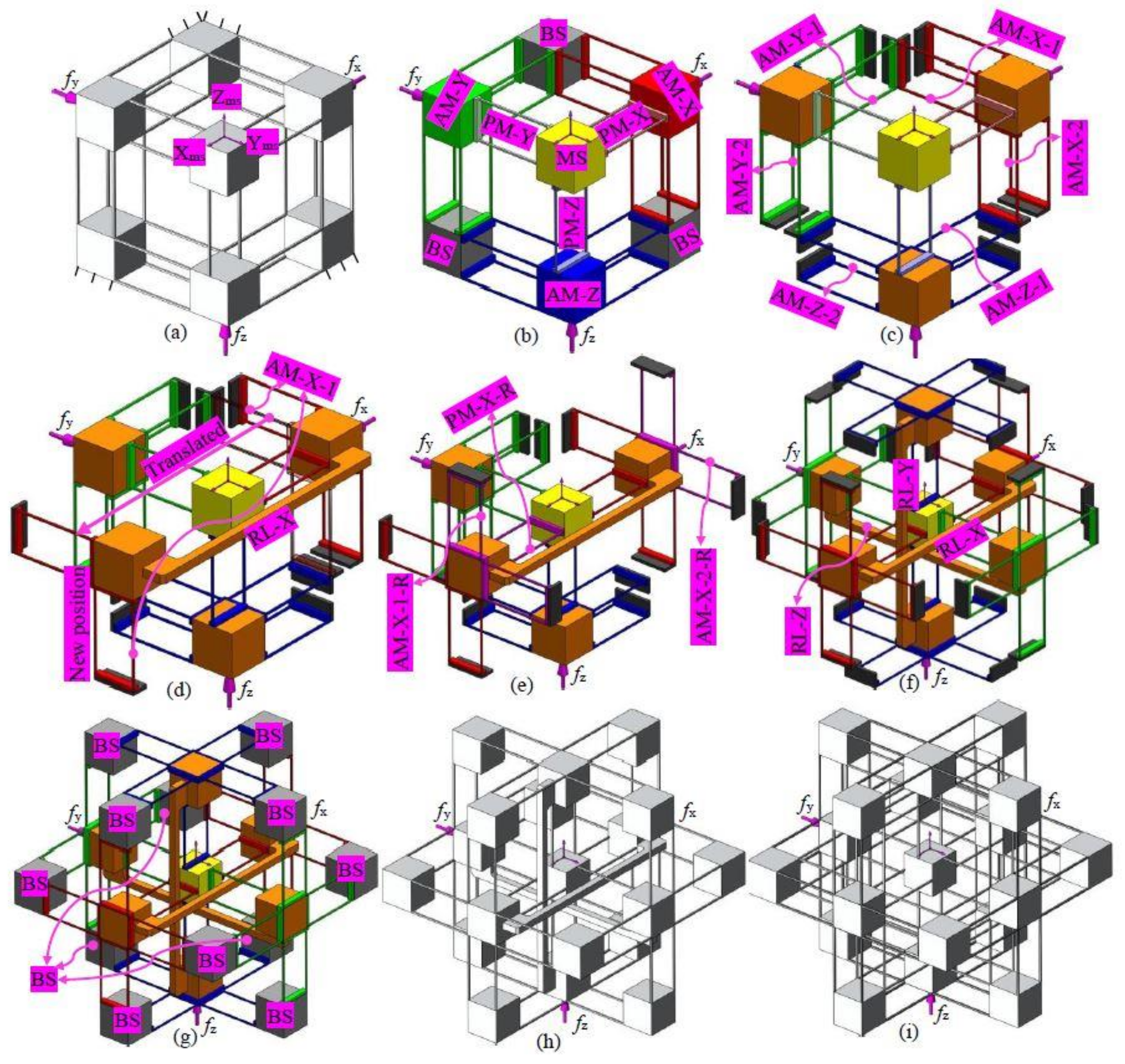
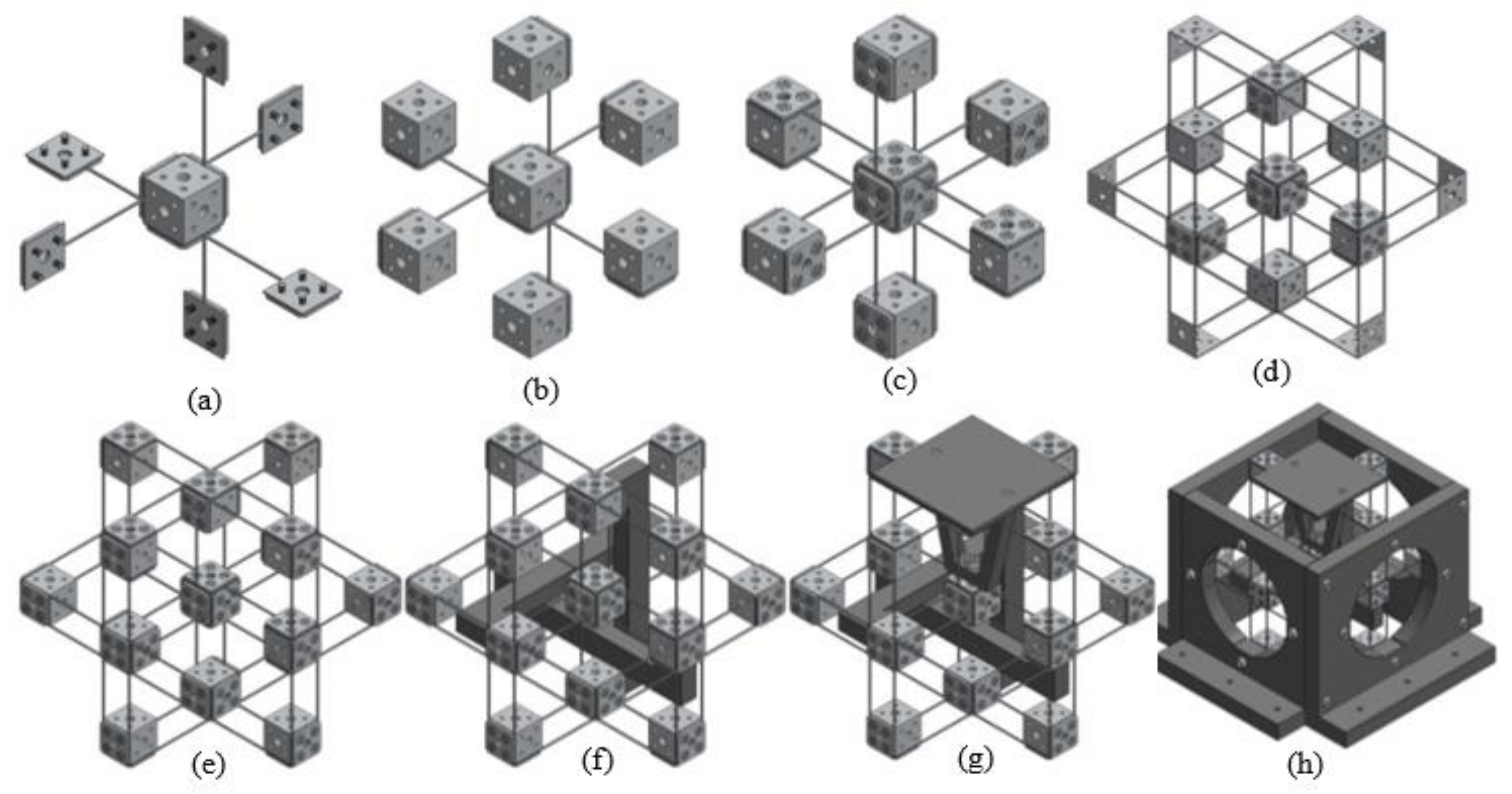
- Further decompose each of the AMs into two DTBCMs. Figure 3c illustrates that the AM-X is decomposed into two DTBCMs: AM-X-1 and AM-X-2; the AM-Y is decomposed into two DTBCMs: AM-Y-1 and AM-Y-2; the AM-Z is decomposed into two DTBCMs: AM-Z-1 and AM-Z-2.
- (c)
- Reconfigure the AM-X by translating the AM-X-1 (within its position space) and its adjacent BSs along the Xms-axis, as shown in Figure 3d, so that the MS is located at the intermediate position between the AM-X-1 and the AM-X-2. As can be seen, a RL-X is needed to link the AM-X-1 and the AM-X-2.
- (d)
- Add redundant compliant modules, AM-X-1-R and AM-X-2-R, as shown in Figure 3e, so that the AM-X is a mirror-symmetric compliant module about the MS. As studied in Section 1, a redundant copy of a compliant module can be added at any one position within the position space of the compliant module. Therefore, the positions of the AM-X-1-R and the AM-X-2-R should be within the position spaces of the AM-X-1 and the AM-X-2, respectively.
- (e)
- Add a redundant PM, PM-X-R (Figure 3e), which is the reflection of the PM-X about the MS. In this case, the PM-X cannot be reconfigured to be symmetrical about the MS, so a redundant PM is added (the redundant PM is placed within the position space of the PM). By this step, the leg of the XYZ CPM associated with the Xms-axis translation is reconfigured.
- (f)
- Reconfigure the other two legs of the XYZ CPM associated with the translations along the Yms- and Zms-axes, following the same reconfiguration process of the leg associated with the translation along the Xms-axis. The resulting design can be seen in Figure 3f.
- (g)
- Re-design the BSs, as shown in Figure 3g.
- (h)
3. Nonlinear and Analytical Kinetostatic Modelling
3.1. Pre-Considerations
3.2. Closed-Form Modelling
3.3. Quantitative Analysis and Comparisons
4. Fabrication and Experimental Tests
4.1. Fabrication Consideration
4.2. Prototype Testing
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| DOF | degree(s) of freedom |
| DOC | degree(s) of constraint |
| FEA | finite element analysis |
| CPM | compliant parallel mechanism |
| MS | motion stage |
| BS | base stage |
| AM | actuated compliant module |
| PM | passive compliant module |
| RL | rigid link |
| TBCM | two-beam compliant module |
| DTBCM | double-two-beam compliant module |
References
- Jones, R.V. Some uses of elasticity in instrument design. J. Sci. Instrum. 1962, 39, 193. [Google Scholar] [CrossRef]
- Erdman, A.G.; Sandor, G.N. Mechanism Design (3rd ed.): Analysis and Synthesis (Volume 1); Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Smith, S.T. Flexures: Elements of Elastic Mechanisms; Gordon and Breach Science Publishers: New York, NY, USA, 2000. [Google Scholar]
- Howell, L.L. Compliant Mechanisms; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Lobontiu, N. Compliant Mechanisms: Design of Flexure Hinges; CRC Press: Boca Raton, Florida, FL, USA, 2002. [Google Scholar]
- Smith, S.T. Foundations of Ultra-Precision Mechanism Design; Gordon and Breach Science Publishers: Philadelphia, PA, USA, 2003. [Google Scholar]
- Kim, D.; Lee, D.Y.; Gweon, D.G. A new nano-accuracy AFM system for minimizing Abbe errors and the evaluation of its measuring uncertainty. Ultramicroscopy 2007, 107, 322–328. [Google Scholar] [CrossRef] [PubMed]
- Schitter, G.; Thurner, P.J.; Hansma, P.K. Design and input-shaping control of a novel scanner for high-speed atomic force microscopy. Mechatronics 2008, 18, 282–288. [Google Scholar] [CrossRef]
- Gorman, J.J.; Dagalakis, N.G. Force control of linear motor stages for microassembly. In Proceedings of the ASME International Mechanical Engineering Conference and Exposition, Washington, DC, USA, 15–21 November 2003; pp. 615–623. [Google Scholar]
- Hesselbach, J.; Raatz, A.; Kunzmann, H. Performance of pseudo-elastic flexure hinges in parallel robots for micro-assembly tasks. CIRP Ann.-Manuf. Technol. 2004, 53, 329–332. [Google Scholar] [CrossRef]
- Kozuka, H.; Arata, J.; Okuda, K.; Onaga, A.; Ohno, M.; Sano, A.; Fujimoto, H. A bio-inspired compliant parallel mechanism for high-precision robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 3122–3127. [Google Scholar]
- Yu, J.; Bi, S.; Zong, G.; Liu, X. On the design of compliant-based micro-motion manipulators with a nanometer range resolution. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kobe, Japan, 20–24 July 2003; pp. 149–154. [Google Scholar]
- Zhou, L.; Marras, A.E.; Su, H.; Castro, C.E. DNA origami compliant nanostructures with tunable mechanical properties. ACS Nano 2014, 8, 27–34. [Google Scholar] [CrossRef] [PubMed]
- Kota, S.; Joo, J.; Li, Z.; Rodgers, S.; Sniegowski, J. Design of compliant mechanisms: Applications to MEMS. Analog Integr. Circuits Signal Process. 2001, 29, 7–15. [Google Scholar] [CrossRef]
- Tolou, N.; Henneken, V.A.; Herder, J.L. Statically balanced compliant micro mechanisms (SB-MEMS): Concepts and simulation. In Proceedings of the ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Montreal, QC, Canada, 15–18 August 2010; pp. 447–454. [Google Scholar]
- Hopkins, J.B.; Rivera, J.; Kim, C.; Krishnan, G. Synthesis and analysis of soft parallel robots comprised of active constraints. J. Mech. Robot. 2015, 7, 011002. [Google Scholar] [CrossRef]
- Chen, G.; Aten, Q.T.; Zirbel, S.; Jensen, B.D.; Howell, L.L. A tristable mechanism configuration employing orthogonal compliant mechanisms. J. Mech. Robot. 2009, 2, 014501. [Google Scholar] [CrossRef]
- Li, H.; Hao, G.; Kavanagh, R. A new XYZ compliant parallel mechanism for micro-/nano-manipulation: Design and analysis. Micromachines 2016, 7, 23. [Google Scholar] [CrossRef]
- Ni, Z.; Zhang, D.; Wu, Y.; Tian, Y.; Hu, M. Analysis of parasitic motion in parallelogram compliant mechanism. Precis. Eng. 2010, 34, 133–138. [Google Scholar] [CrossRef]
- Verotti, M. Analysis of the center of rotation in primitive flexures: Uniform cantilever beams with constant curvature. Mech. Mach. Theory 2016, 97, 29–50. [Google Scholar] [CrossRef]
- Verotti, M. Effect of initial curvature in uniform flexures on position accuracy. Mech. Mach. Theory 2018, 119, 106–118. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, W. Analysis of the displacement of distributed compliant parallel-guiding mechanism considering parasitic rotation and deflection on the guiding plate. Mech. Mach. Theory 2014, 80, 151–165. [Google Scholar]
- Awtar, S.; Slocum, A.H. Constraint-based design of parallel kinematic XY flexure mechanisms. J. Mech. Des. 2006, 129, 816–830. [Google Scholar] [CrossRef]
- Pei, X.; Yu, J.; Zong, G.; Bi, S.; Hu, Y. A novel family of leaf-type compliant joints: Combination of two isosceles-trapezoidal flexural pivots. J. Mech. Robot. 2009, 1, 021005. [Google Scholar] [CrossRef]
- Pei, X.; Yu, J.; Zong, G.; Bi, S.; Yu, Z. Analysis of rotational precision for an isosceles-trapezoidal flexural pivot. J. Mech. Des. 2008, 130, 052302. [Google Scholar]
- Li, H.; Hao, G. A constraint and position identification (CPI) approach for the synthesis of decoupled spatial translational compliant parallel manipulators. Mech. Mach. Theory 2015, 90, 59–83. [Google Scholar] [CrossRef]
- Hao, G.; Li, H.; Kavanagh, R. Design of decoupled, compact, and monolithic spatial translational compliant parallel manipulators based on the position space. Proc. Inst. Mech. Eng. C J. Mech. Eng. 2015, 230, 367–378. [Google Scholar] [CrossRef]
- Li, H.; Hao, G.; Kavanagh, R. Position-space-based compliant mechanism reconfiguration approach and its application in the reduction of parasitic motion. J. Mech. Des. 2016, 138, 092301. [Google Scholar] [CrossRef]
- Hao, G.; Li, H. Conceptual designs of multi-degree of freedom compliant parallel manipulators composed of wire-beam based compliant mechanisms. Proc. Inst. Mech. Eng. C J. Mech. Eng. 2015, 229, 538–555. [Google Scholar] [CrossRef]
- Culpepper, M.L.; Anderson, G. Design of a low-cost nano-manipulator which utilizes a monolithic, spatial compliant mechanism. Precis. Eng. 2004, 28, 469–482. [Google Scholar] [CrossRef]
- Hao, G.; Li, H. Extended static modeling and analysis of compliant compound parallelogram mechanisms considering the initial internal axial force. J. Mech. Robot. 2016, 8, 041008. [Google Scholar] [CrossRef]
- Hao, G.; Hand, R.; Kong, X.; Chang, W.; Luo, X. Design of compliant parallel grippers using the position space concept for manipulating sub-millimeter objects. In Proceedings of the 2015 21st International Conference on Automation and Computing (ICAC), Glasgow, UK, 11–12 September 2015. [Google Scholar]
- Hao, G.; Kong, X.; Reuben, R.L. A nonlinear analysis of spatial compliant parallel modules: Multi-beam modules. Mech. Mach. Theory 2011, 46, 680–706. [Google Scholar] [CrossRef]
- Li, H.; Hao, G. Constraint-force-based approach of modelling compliant mechanisms: Principle and application. Precis. Eng. 2017, 47, 158–181. [Google Scholar] [CrossRef]
- Sandon, R.; Li, H.; Ferro, F.F.; Trevisani, A.; Hao, G.; Kavanagh, R. High-performance control of a single-axis compliant nano-positioning system: Control. In Proceedings of the 34th International Manufacturing Conference, Sligo, Ireland, 30–31 August 2017. [Google Scholar]
- Sandon, R.; Li, H.; Ferro, F.F.; Trevisani, A.; Kavanagh, R.; Hao, G. High-performance control of a single-axis compliant nano-positioning system: Design. In Proceedings of the 34th International Manufacturing Conference, Sligo, Ireland, 30–31 August 2017. [Google Scholar]
















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Hao, G. Position-Space-Based Design of a Symmetric Spatial Translational Compliant Mechanism for Micro-/Nano-Manipulation. Micromachines 2018, 9, 189. https://doi.org/10.3390/mi9040189
Li H, Hao G. Position-Space-Based Design of a Symmetric Spatial Translational Compliant Mechanism for Micro-/Nano-Manipulation. Micromachines. 2018; 9(4):189. https://doi.org/10.3390/mi9040189
Chicago/Turabian StyleLi, Haiyang, and Guangbo Hao. 2018. "Position-Space-Based Design of a Symmetric Spatial Translational Compliant Mechanism for Micro-/Nano-Manipulation" Micromachines 9, no. 4: 189. https://doi.org/10.3390/mi9040189
APA StyleLi, H., & Hao, G. (2018). Position-Space-Based Design of a Symmetric Spatial Translational Compliant Mechanism for Micro-/Nano-Manipulation. Micromachines, 9(4), 189. https://doi.org/10.3390/mi9040189