Development of a Fully Flexible Sheet-Type Tactile Display Based on Electrovibration Stimulus



Abstract
:1. Introduction
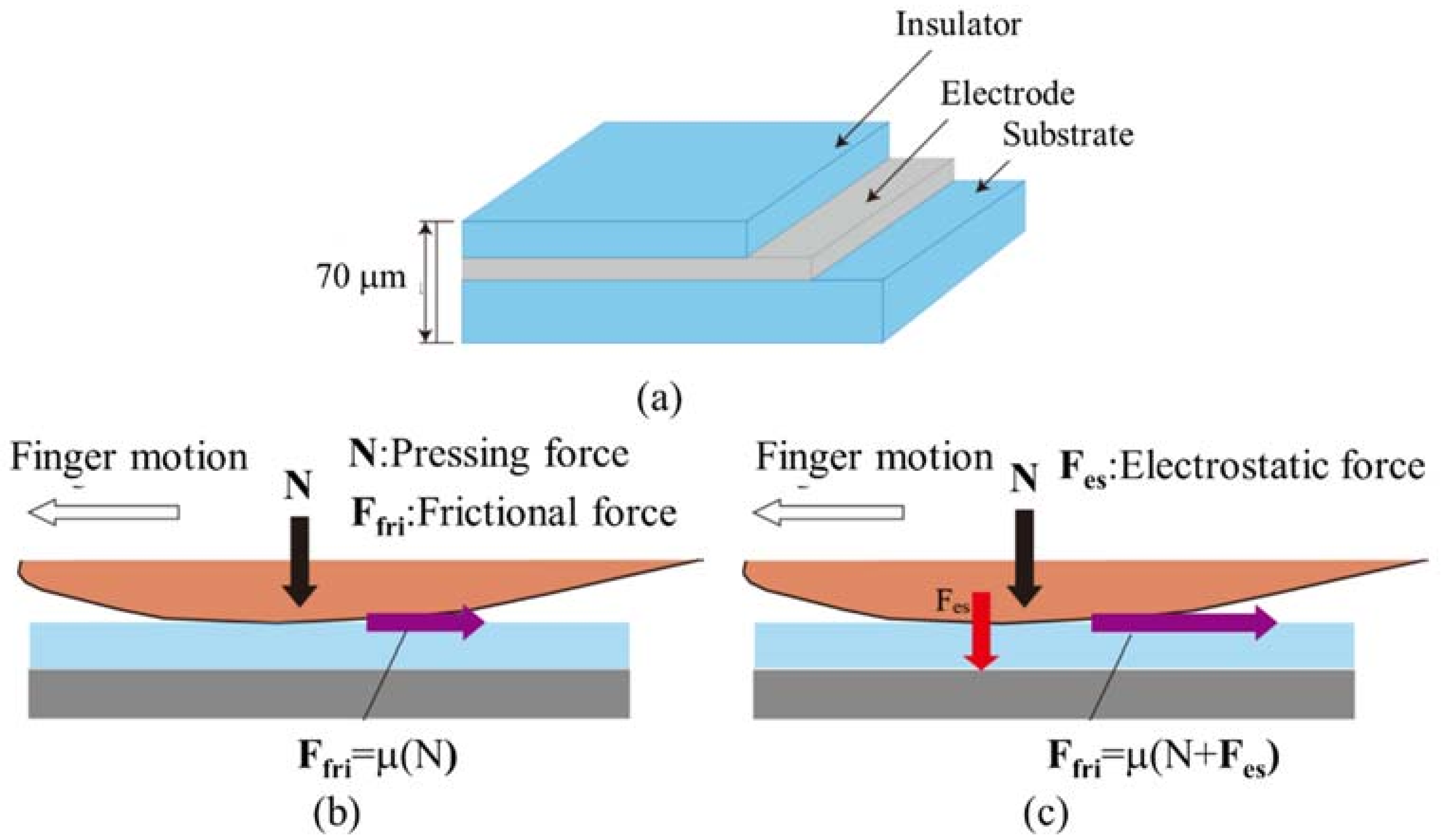
2. Principle
3. Materials and Methods
3.1. Materials
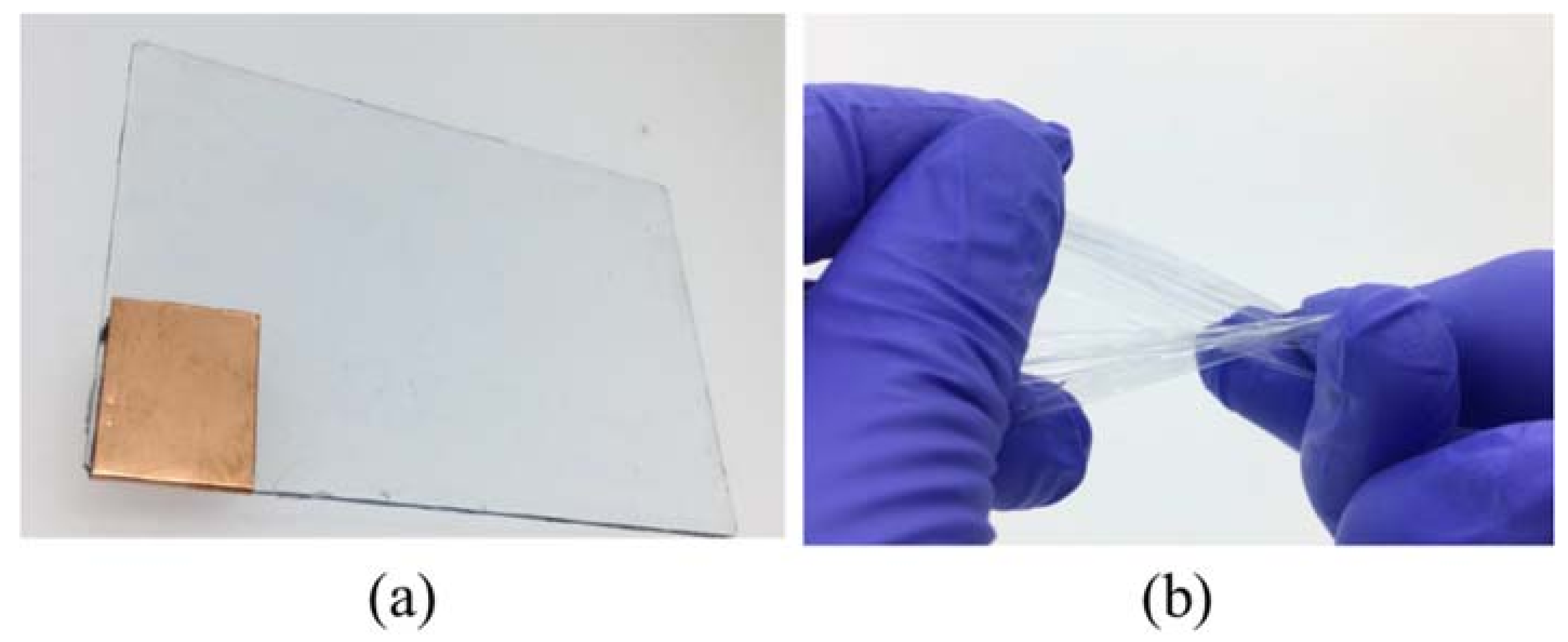
3.2. Fabrication Process
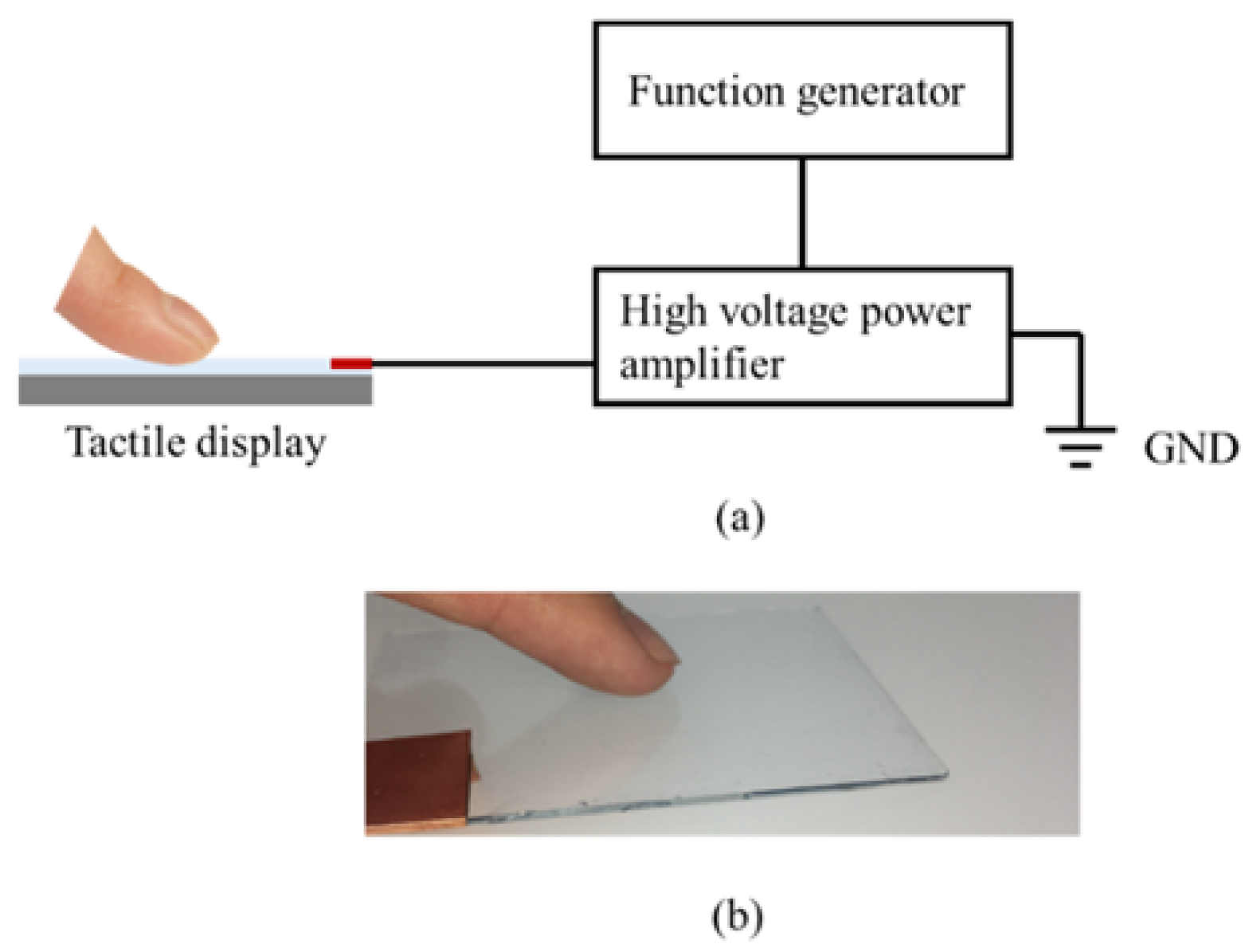
3.3. Experimental Procedures
3.3.1. Bending Experiments
3.3.2. Effect of Voltage Waveform on Perception
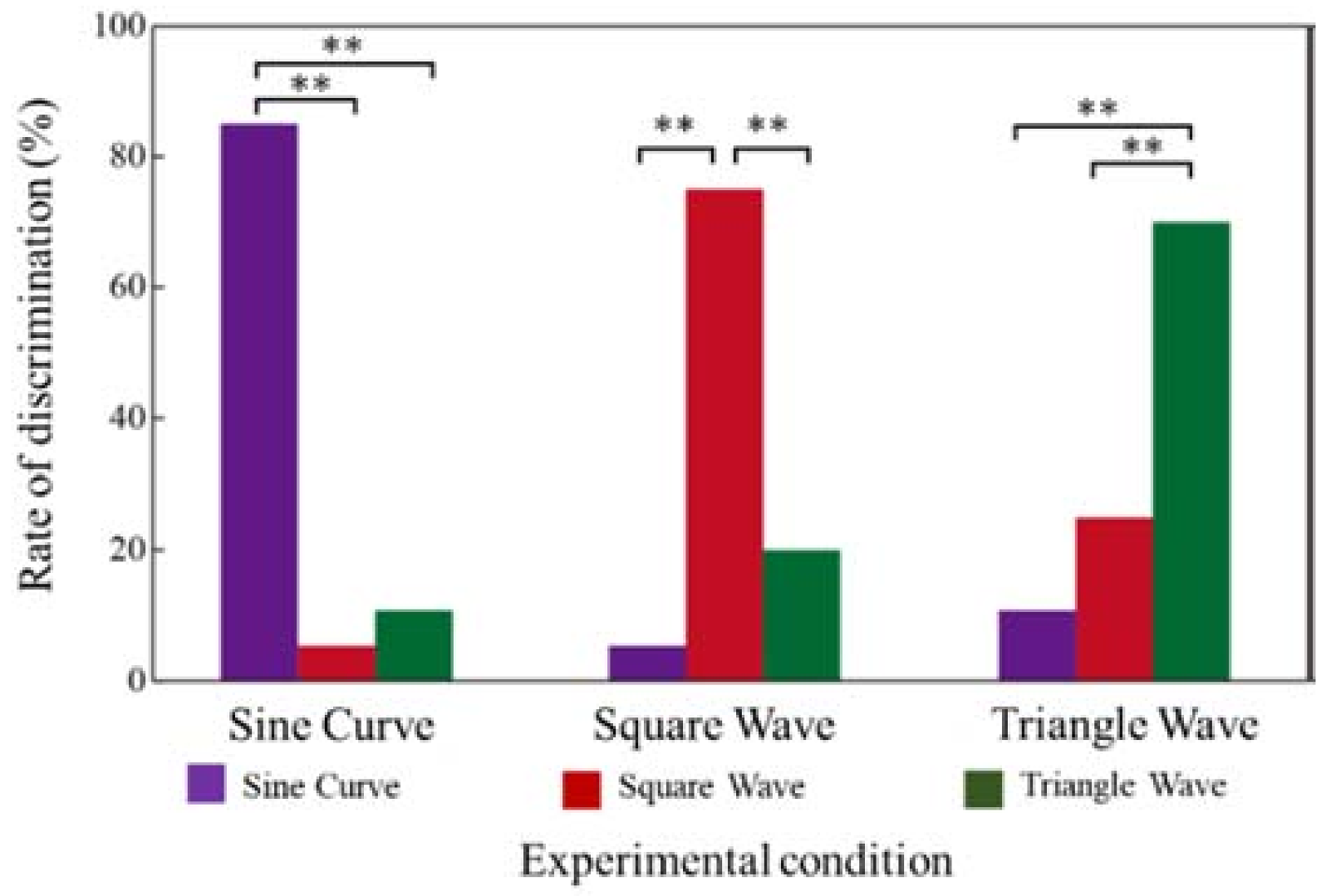
3.3.3. Waveform Discrimination
3.3.4. Effect of Duty Cycle
3.3.5. Multiple Tactile Stimulus
4. Experimental Results
4.1. Bending Experiments
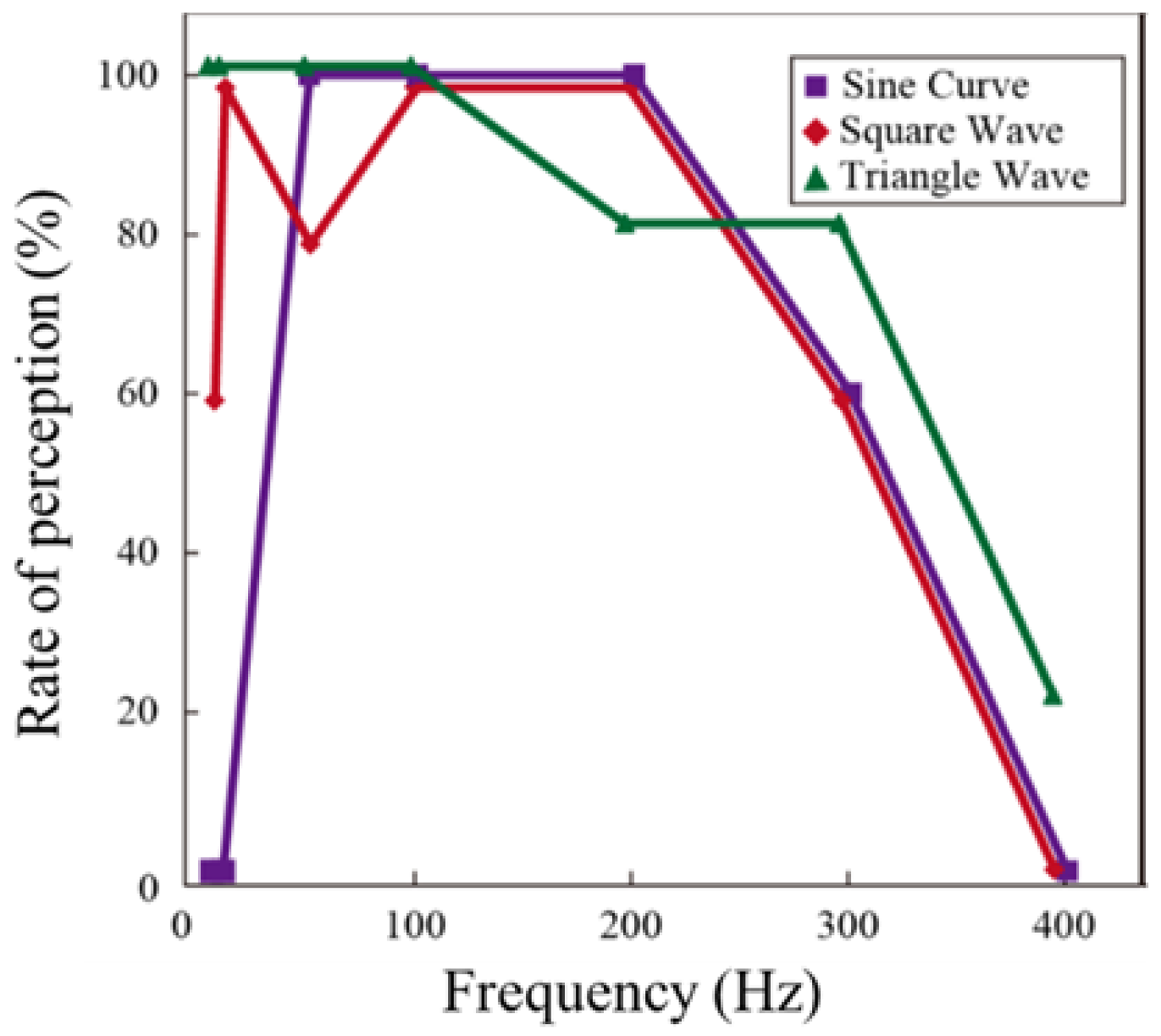
4.2. Effect of Voltage Waveform
4.3. Waveform Discrimination
4.4. Effect of Duty Cycle
4.5. Multiple Tactile Stimulus
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Lévesque, V.; Hayward, V. Tactile graphics rendering using three laterotactile drawing primitives. In Proceedings of the Haptic Interfaces for Virtual Environment and Teleoperator Systems (Haptics 2008), Reno, NE, USA, 13–14 March 2008; pp. 429–436. [Google Scholar] [CrossRef]
- Choi, H.R.; Kim, D.; Chuc, N.H.; Vuong, N.H.L.; Koo, J.; Nam, J.-D.; Lee, Y. Development of integrated tactile display devices. Proc. EAPAD 2009, 7287, 72871C. [Google Scholar] [CrossRef]
- Gallo, S.; Son, C.; Lee, H.J.; Bleuler, H.; Cho, I.J. A flexible multimodal tactile display for delivering shape and material information. Sens. Actuators A Phys. 2015, 236, 180–189. [Google Scholar] [CrossRef]
- Hoshi, T.; Takahashi, M.; Iwamoto, T.; Shinoda, H. Noncontact tactile display based on radiation pressure of airborne ultrasound. IEEE Trans. Haptics 2010, 3, 155–165. [Google Scholar] [CrossRef] [PubMed]
- Ochiai, Y.; Kumagai, K.; Hoshi, T.; Hasegawa, S.; Hayasaki, Y. Cross-field aerial haptics: Rendering haptic feedback in air with light and acoustic fields. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 3238–3247. [Google Scholar] [CrossRef]
- Hashizume, S.; Koike, A.; Hoshi, T.; Ochiai, Y. Sonovortex: Rendering multi-resolution aerial haptics by aerodynamic vortex and focused ultrasound. In Proceedings of the ACM SIGGRAPH 2017 Posters (SIGGRAPH’17), Los Angeles, CA, USA, 30 July–3 August 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Biet, M.; Giraud, F.; Lemaire-Semail, B. Squeeze film effect for the design of an ultrasonic tactile plate. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 2678–2688. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ishizuka, H.; Miki, N. MEMS-based tactile displays. Displays 2015, 37, 25–32. [Google Scholar] [CrossRef]
- Arouette, X.; Matsumoto, Y.; Ninomiya, T.; Okayama, Y.; Miki, N. Dynamic characteristics of a hydraulic amplification mechanism for large displacement actuators systems. Sensors 2010, 10, 2946–2956. [Google Scholar] [CrossRef] [PubMed]
- Ninomiya, T.; Okayama, Y.; Matsumoto, Y.; Arouette, X.; Osawa, K.; Miki, N. MEMS-based hydraulic displacement amplification mechanism with completely encapsulated liquid. Sens. Actuators A Phys. 2011, 166, 277–282. [Google Scholar] [CrossRef]
- Kosemura, Y.; Ishikawa, H.; Watanabe, J.; Miki, N. Characterization of surfaces virtually created using MEMS tactile display. Jpn. J. Appl. Phys. 2014, 53, 06JM11. [Google Scholar] [CrossRef]
- Kajimoto, H. Design of cylindrical whole-hand haptic interface using electrocutaneous display. In Lecture Notes in Computer Science; Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics; 7283 LNCS; Springer: Berlin/Heidelberg, Germany, 2012; pp. 67–72. [Google Scholar]
- Kitamura, N.; Chim, J.; Miki, N. Electrotactile display using microfabricated micro-needle array. J. Micromech. Microeng. 2015, 25, 025016. [Google Scholar] [CrossRef]
- Tezuka, M.; Kitamura, N.; Tanaka, K.; Miki, N. Presentation of various tactile sensations using micro-needle electrotactile display. PLoS ONE 2016, 11, e0148410. [Google Scholar] [CrossRef] [PubMed]
- Tezuka, M.; Kitamura, N.; Miki, N. Information transfer using wearable thin electrotactile displays with microneedle electrodes. Jpn. J. Appl. Phys. 2016, 55, 06GP15. [Google Scholar] [CrossRef]
- Kato, Y.; Sekitani, T.; Takamiya, M.; Doi, M.; Asaka, K.; Sakurai, T.; Someya, T. Sheet-type braille displays by integrating organic field-effect transistors and polymeric actuators. IEEE Trans. Electron Devices 2007, 54, 202–209. [Google Scholar] [CrossRef]
- Yun, S.; Yun, G.; Kim, K.; Kang, B.; Kim, J.; Kim, S. Film-type haptic actuator made with cellulose acetate layers. J. Int. Mater. Syst. Struct. 2014, 25, 1289–1294. [Google Scholar] [CrossRef]
- Mallinckrodt, E.; Hughes, A.L.; Sleator, W. Perception by the skin of electrically induced vibrations. Fungistatic 1952, 47, 277–279. [Google Scholar] [CrossRef]
- Strong, R.M.; Troxel, D.E. An electrotactile display. IEEE Trans. Man-Mach. Syst. 1970, 11, 72–79. [Google Scholar] [CrossRef]
- Tang, H.; Beebe, D.J. A microfabricated electrostatic haptic display for persons with visual impairments. IEEE Trans. Rehabil. Eng. 1998, 6, 241–248. [Google Scholar] [CrossRef] [PubMed]
- Yamamoto, A.; Nagasawa, S.; Yamamoto, H.; Higuchi, T. Electrostatic tactile display with thin film slider and its application to tactile telepresentation systems. IEEE Trans. Vis. Comput. Graph. 2006, 12, 168–177. [Google Scholar] [CrossRef] [PubMed]
- Volynskii, A.L.; Bazhenov, S.; Lebedeva, O.V.; Bakeev, N.F. Mechanical buckling instability of thin coatings deposited on soft polymer substrates. J. Mater. Sci. 2000, 35, 547–554. [Google Scholar] [CrossRef]
- Kim, S.B.; Yi, N.H.; Kim, H.Y.; Kim, J.H.J.; Song, Y.C. Material and structural performance evaluation of recycled PET fiber reinforced concrete. Cem. Concr. Compos. 2010, 32, 232–240. [Google Scholar] [CrossRef]
- Lan, Y.F.; Peng, W.C.; Lo, Y.H.; He, J.L. Durability under mechanical bending of the indium tin oxide films deposited on polymer substrate by thermionically enhanced sputtering. Org. Electron. Phys. Mater. Appl. 2010, 11, 670–676. [Google Scholar] [CrossRef]
- Chen, Z.; Cotterell, B.; Wang, W. The fracture of brittle thin films on compliant substrates in flexible displays. Eng. Fract. Mech. 2002, 69, 597–603. [Google Scholar] [CrossRef]
- Choi, K.; Kim, J.; Lee, Y.; Kim, H. ITO/Ag/ITO multilayer films for the application of a very low resistance transparent electrode. Thin Solid Films 1999, 341, 152–155. [Google Scholar] [CrossRef]
- Chen, B.J.; Sun, X.W.; Tay, B.K. Fabrication of ITO thin films by filtered cathodic vacuum arc deposition. Mater. Sci. Eng. B Solid-State Mater. Adv. Technol. 2004, 106, 300–304. [Google Scholar] [CrossRef]
- Wang, Z.; Volinsky, A.A.; Gallant, N.D. Crosslinking effect on polydimethylsiloxane elastic modulus measured by custom-built compression instrument. J. Appl. Polym. Sci. 2014, 131, 41050. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.B.; Tee, B.C.K.; Stoltenberg, R.M.; Chen, C.V.H.H.; Barman, S.; Muir, B.V.O.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef] [PubMed]
- Nagai, H.; Takashima, S.; Hiramatsu, M.; Hori, M.; Goto, T. Behavior of atomic radicals and their effects on organic low dielectric constant film etching in high density N2/H2and N2/NH3plasmas. J. Appl. Phys. 2002, 91, 2615–2621. [Google Scholar] [CrossRef]
- Qu, J.; Ouyang, L.; Kuo, C.C.; Martin, D.C. Stiffness, strength and adhesion characterization of electrochemically deposited conjugated polymer films. Acta Biomater. 2016, 31, 114–121. [Google Scholar] [CrossRef] [PubMed]
- Cho, C.K.; Hwang, W.J.; Eun, K.; Choa, S.H.; Na, S.I.; Kim, H.K. Mechanical flexibility of transparent PEDOT:PSS electrodes prepared by gravure printing for flexible organic solar cells. Sol. Energy Mater. Sol. Cells 2011, 95, 3269–3275. [Google Scholar] [CrossRef]
- Alzoubi, K.; Choi, G.; Hamasha, M.M.; Alkhazali, A.S.; Defranco, J.; Lu, S.; Sammakia, B.; Westgate, C. Comparisons of the mechanical behaviors of poly(3,4-ethylenedioxythiophene) (PEDOT) and ITO on flexible substrates. Mater. Res. Soc. Symp. Proc. 2013, 1493, 127–132. [Google Scholar] [CrossRef]
- Bau, O.; Poupyrev, I. Revel. ACM Trans. Graph. 2012, 31, 1–11. [Google Scholar] [CrossRef]
- Bau, O.; Poupyrev; Israr, A. Harrison TeslaTouch: Electrovibration for touch surfaces. In Proceedings of the 23nd Annual ACM Symposium on User Interface Software and Technology, New York, NY, USA, 3–6 October 2010; pp. 283–292. [Google Scholar] [CrossRef]
- Greco, F.; Zucca, A.; Taccola, S.; Menciassi, A.; Fujie, T.; Haniuda, H.; Takeoka, S.; Dario, P.; Mattoli, V. Ultra-thin conductive free-standing PEDOT/PSS nanofilms. Soft Matter 2011, 7, 10642. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, J.; Wang, J.; Zhang, J.; Yang, Q. Solar Energy Materials & Solar Cells Highly conductive PEDOT:PSS transparent electrode prepared by a post-spin-rinsing method for efficient ITO-free polymer solar cells. Sol. Energy Mater. Sol. Cells 2016, 144, 143–149. [Google Scholar] [CrossRef]
- Vardar, Y.; Guclu, B.; Basdogan, C. Effect of Waveform on Tactile Perception by Electrovibration Displayed on Touch Screens. IEEE Trans. Haptics 2017, 10, 488–499. [Google Scholar] [CrossRef] [PubMed]
- Muniak, M.A.; Ray, S.; Hsiao, S.S.; Dammann, J.F.; Bensmaia, S.J. The neural coding of stimulus intensity: linking the population response of mechanoreceptive afferents with psychophysical behavior. J. Neurosci. 2007, 27, 11687–11699. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Condition | |||
|---|---|---|---|
| I | II | III | |
| Waveform | Sinusoidal | Square | Triangle |
| Voltage | 250 V | 250 V | 250 V |
| Frequency | 50 Hz | 50 Hz | 50 Hz |
| Experimental Condition | ||||
|---|---|---|---|---|
| I | II | III | IV | |
| Surface temperature | 30 °C | 30 °C | 20 °C | 20 °C |
| Peak voltage | 250 V | 250 V | 250 V | 250 V |
| Frequency | 10 Hz | 100 Hz | 10 Hz | 100 Hz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ishizuka, H.; Hatada, R.; Cortes, C.; Miki, N. Development of a Fully Flexible Sheet-Type Tactile Display Based on Electrovibration Stimulus. Micromachines 2018, 9, 230. https://doi.org/10.3390/mi9050230
Ishizuka H, Hatada R, Cortes C, Miki N. Development of a Fully Flexible Sheet-Type Tactile Display Based on Electrovibration Stimulus. Micromachines. 2018; 9(5):230. https://doi.org/10.3390/mi9050230
Chicago/Turabian StyleIshizuka, Hiroki, Ryuhei Hatada, Carlos Cortes, and Norihisa Miki. 2018. "Development of a Fully Flexible Sheet-Type Tactile Display Based on Electrovibration Stimulus" Micromachines 9, no. 5: 230. https://doi.org/10.3390/mi9050230
APA StyleIshizuka, H., Hatada, R., Cortes, C., & Miki, N. (2018). Development of a Fully Flexible Sheet-Type Tactile Display Based on Electrovibration Stimulus. Micromachines, 9(5), 230. https://doi.org/10.3390/mi9050230